

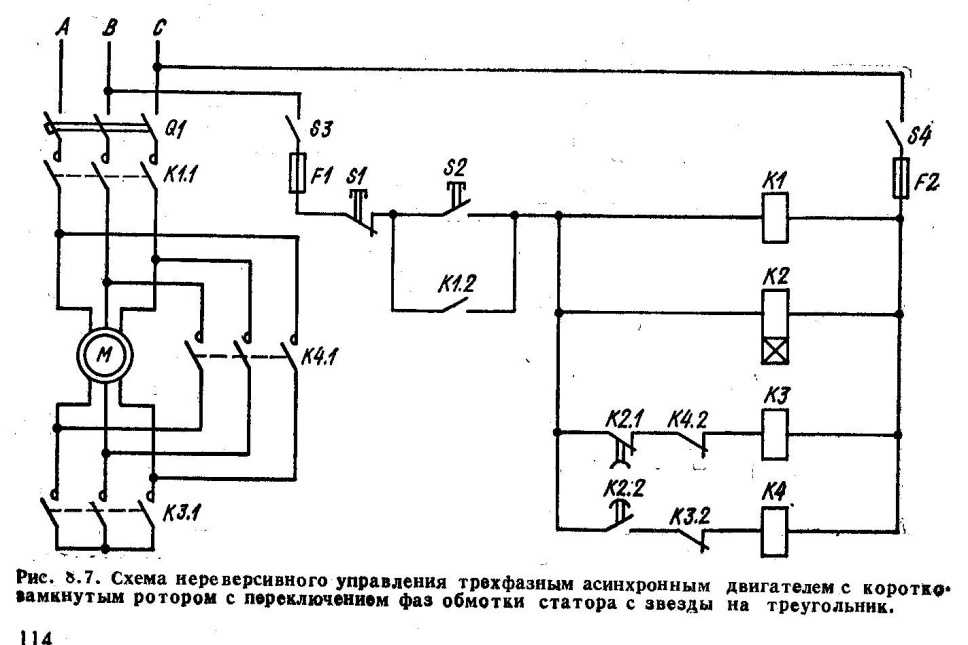
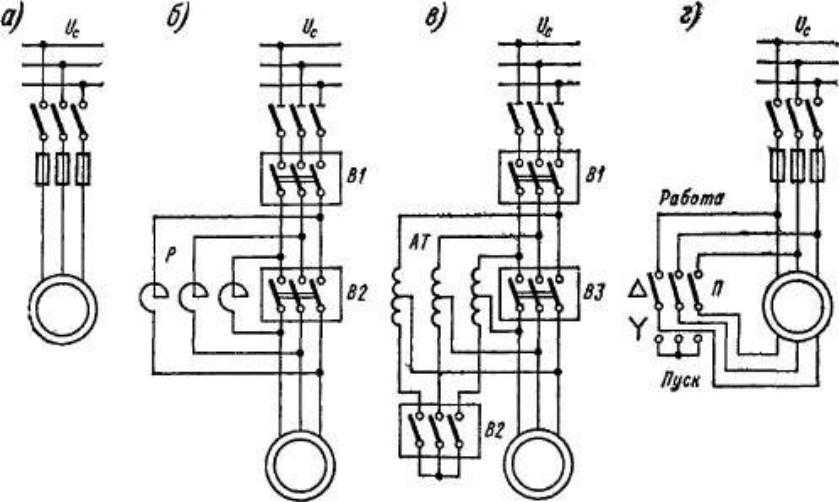
Схема управления двигателем «звезда-треугольник»
Данная схема применяется когда нужно уменьшить пусковой ток двигателя, в основном она используется для двигателей большой мощности.
В момент пуска, обмотки статора двигателя соединены в «звезду», после того как двигатель разогнался, происходит переключение обмоток статора со «звезды» на «треугольник».
Подробно об изменении мощности при схеме соединении двигателя звезда-треугольник рассмотрено в статье: «Расчет мощности двигателя при схеме соединения звезда-треугольник».
Принцип работы
При нажатии кнопки SB2 «ПУСК» подается напряжение на катушку реле времени КТ1, контактора КМ1 и промежуточного реле KL1. Реле KL1 добавлено в схему в связи с тем, что у реле времени есть только одна группа блок-контактов, если же у Вашего реле времени есть дополнительная группа блок-контактов, реле KL1 – не используется. Не много забегая вперед, в архиве вы сможете найти схему управления двигателем «звезда-треугольник» без промежуточного реле KL1.
После того как сработало реле KL1 мгновенно замыкаются его контакты 11-14 и через нормально закрытые контакты 22-21 контактора КМ2 срабатывает контактор КМ3. При этом контакты 21-22 реле KL1 размыкаются, тем самым выполняется блокировка от одновременного включения контакторов КМ3 и КМ2.
Когда контактор КМ3 сработал, он своими силовыми контактами соединяет обмотку статора двигателя «звездой».
После того как двигатель разогнался при пониженном напряжении, контакты реле времени КТ1 11-12 разомкнутся, тем самым сняв напряжение с катушки реле KL1, в это время контакты реле KL1 11-14 размыкают цепь включения контактора КМ3, а в цепи включения контактора КМ2 замыкаются, и если контакты 21-22 контактора КМ3 замкнуты, то включается контактор КМ2.
После этого контактор КМ2 своими силовыми контактами соединяет обмотку статора двигателя «треугольником».
На этом процесс подключения двигателя к сети ~380 В – заканчивается.
В архиве вы сможете найти следующие схемы в формате dwg:
- схема управления нереверсивным двигателем – «прямой пуск»
- схема реверсивного управления двигателем
- схема управления двигателем «звезда-треугольник» с реле времени и промежуточным реле
- схема управления двигателем «звезда-треугольник» с реле времени
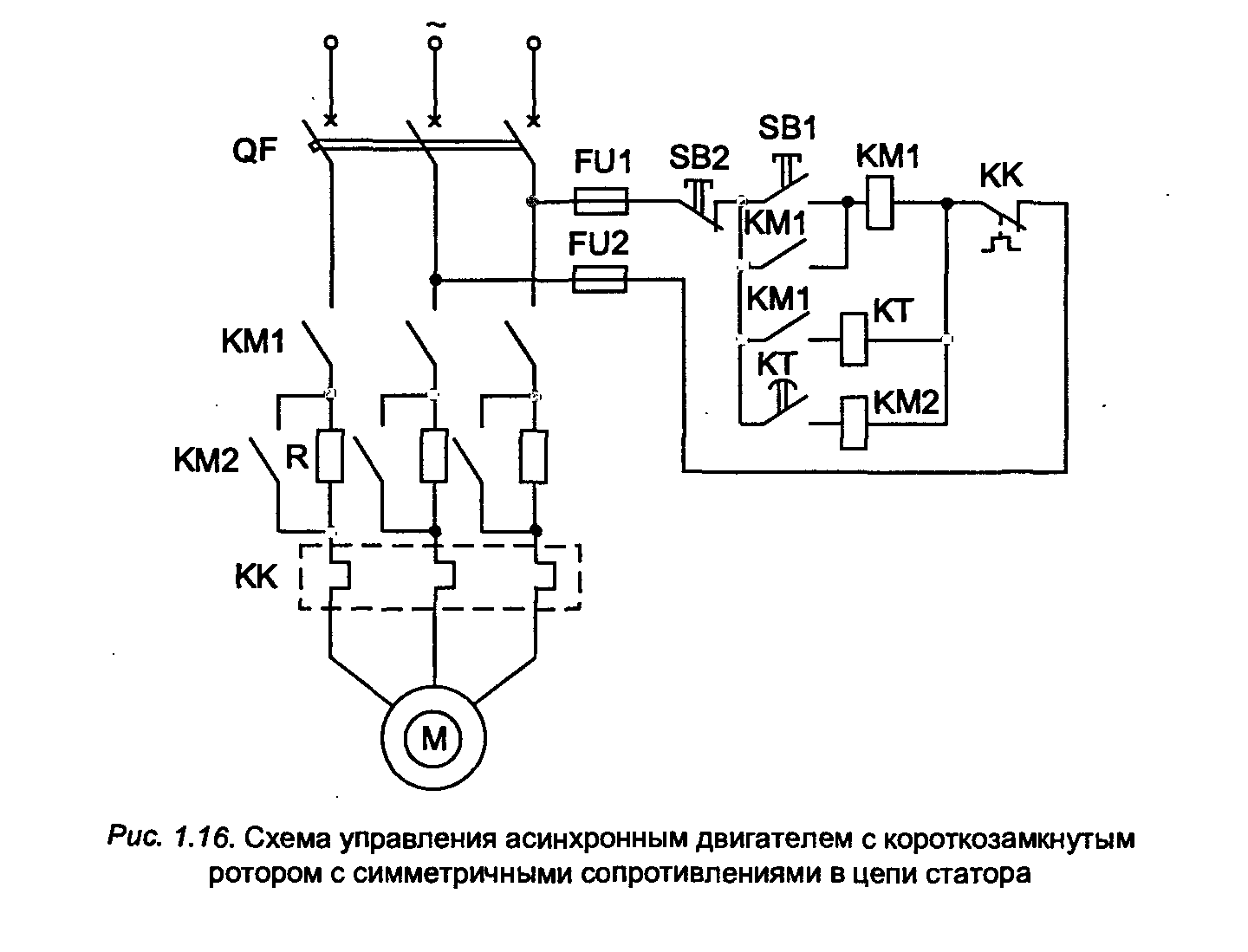
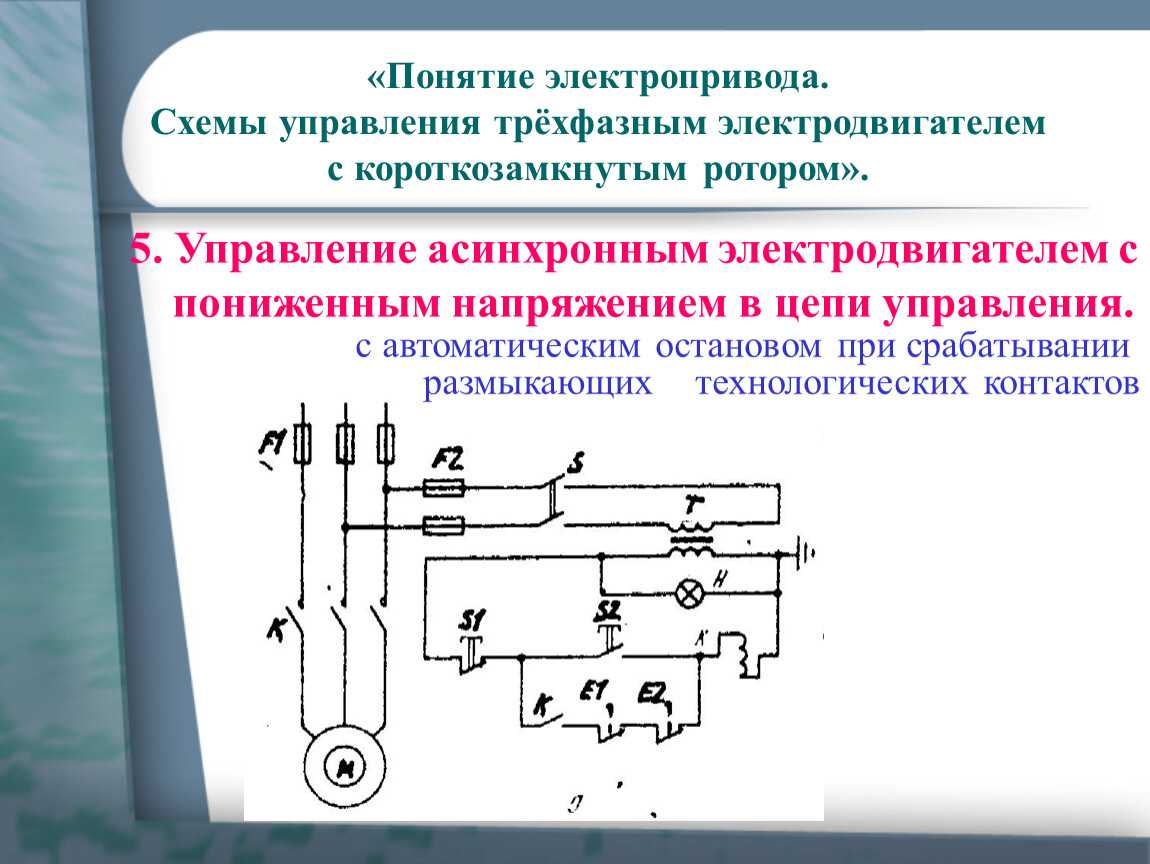
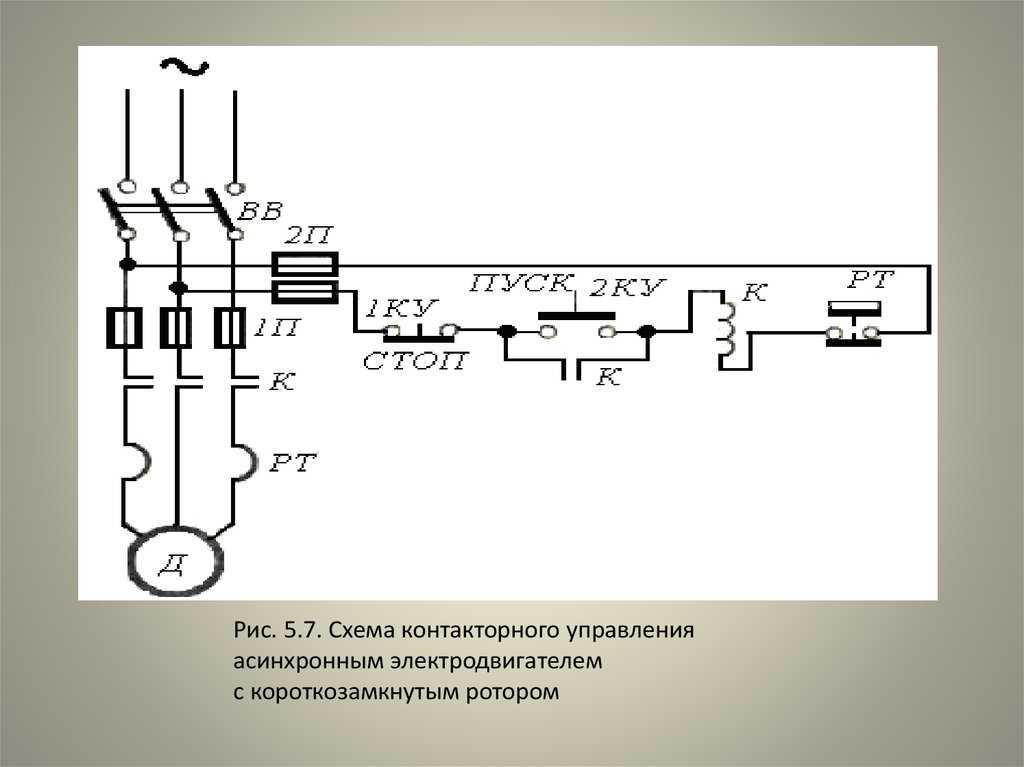
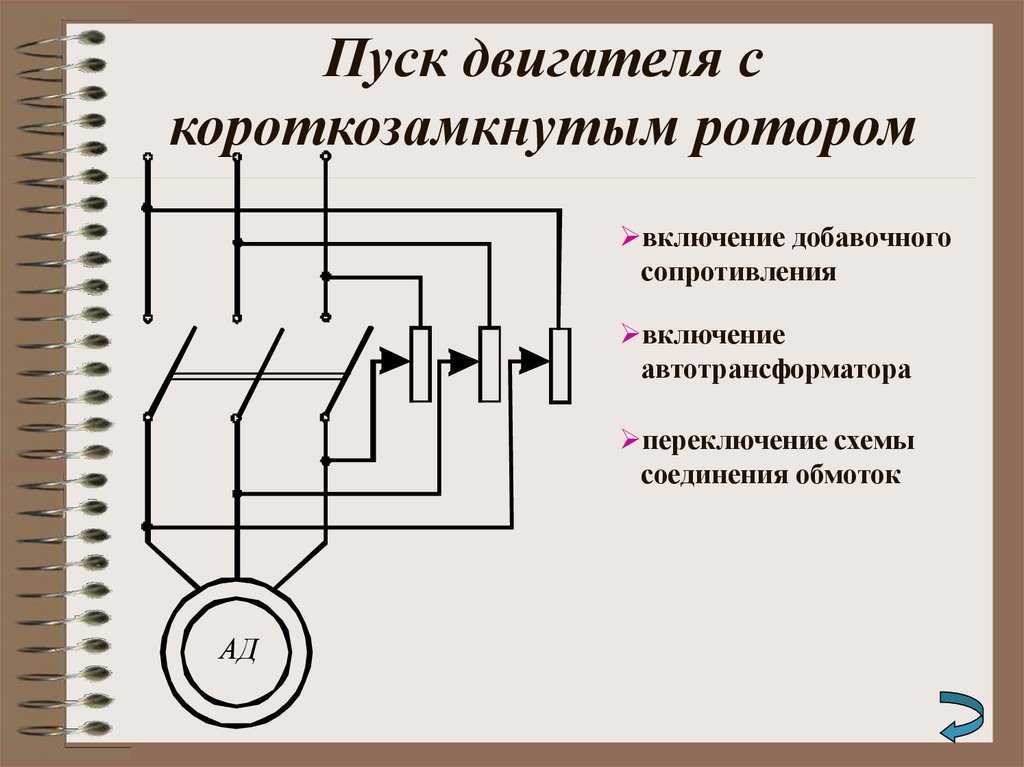
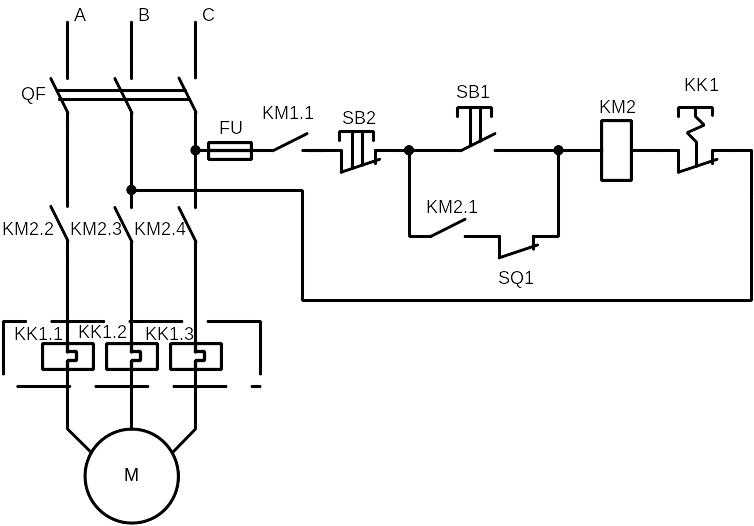
Реостатный пуск асинхронного двигателя с кз ротором.
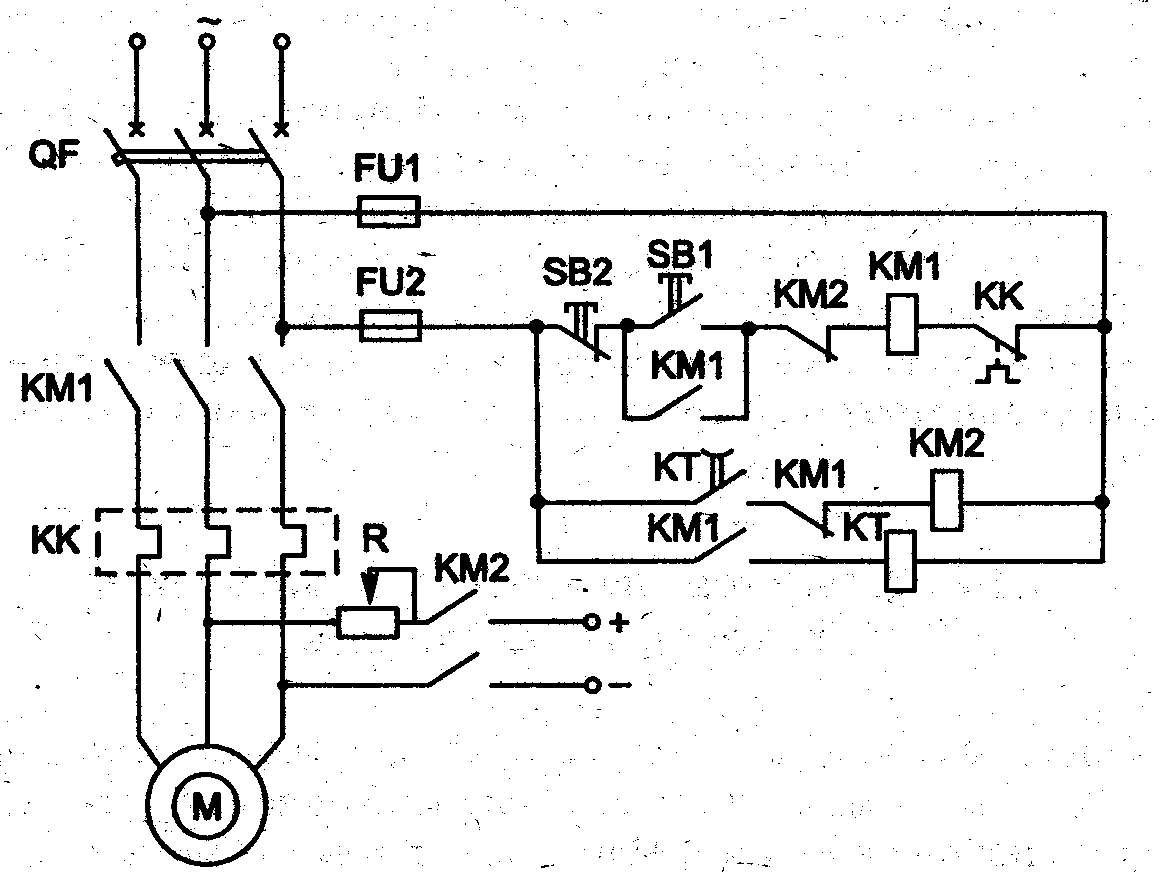
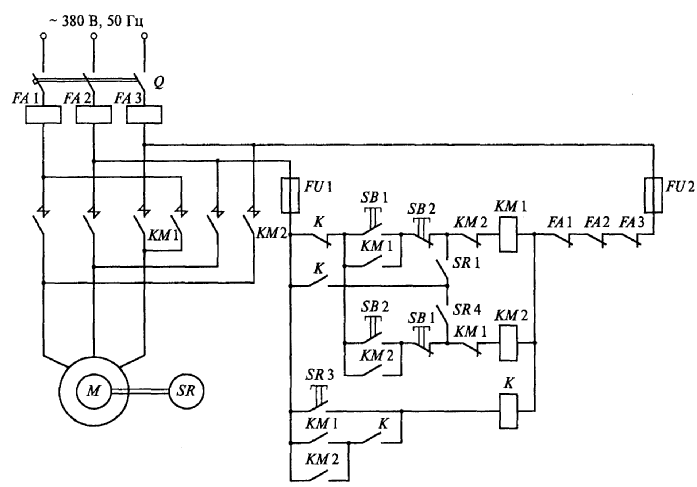
Если невозможно запустить АД с кз ротором в стандартном режиме, используют запуск при сниженном напряжении. С этой целью в цепь статора добавляют сопротивление, реостат или используют автотрансформатор. Автоматический выключатель QF срабатывает и на управляющую и силовую цепь поступает напряжение. После нажатия кнопки SB1 пускатель КМ1 приходит в действие, подавая электроток в цепь статора с включенным сопротивлением. В то же время питание поступает и на реле времени КТ.
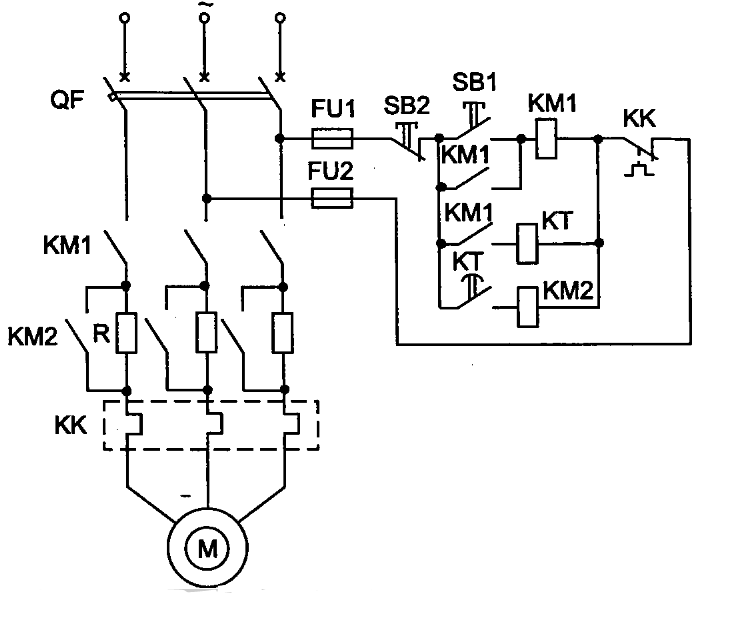
Рисунок 2 — Схема асинхронного двигателя с симметричными сопротивлениями (реостатный пуск)
Через определенный временной интервал, задаваемый реле КТ, происходит замыкание контакта КТ. В итоге пускатель КМ2 шунтирует (закорачивает) сопротивление статора. Процедура запуска электродвигателя завершается. Для его выключения необходимо нажать клавишу SB2 и выключить автомат QF.
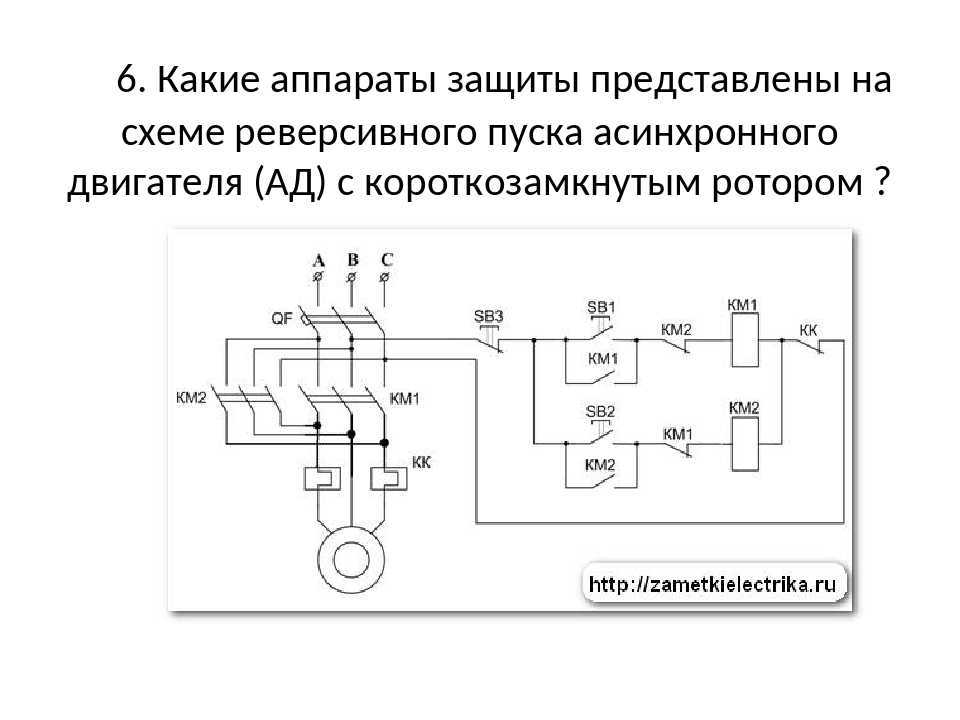
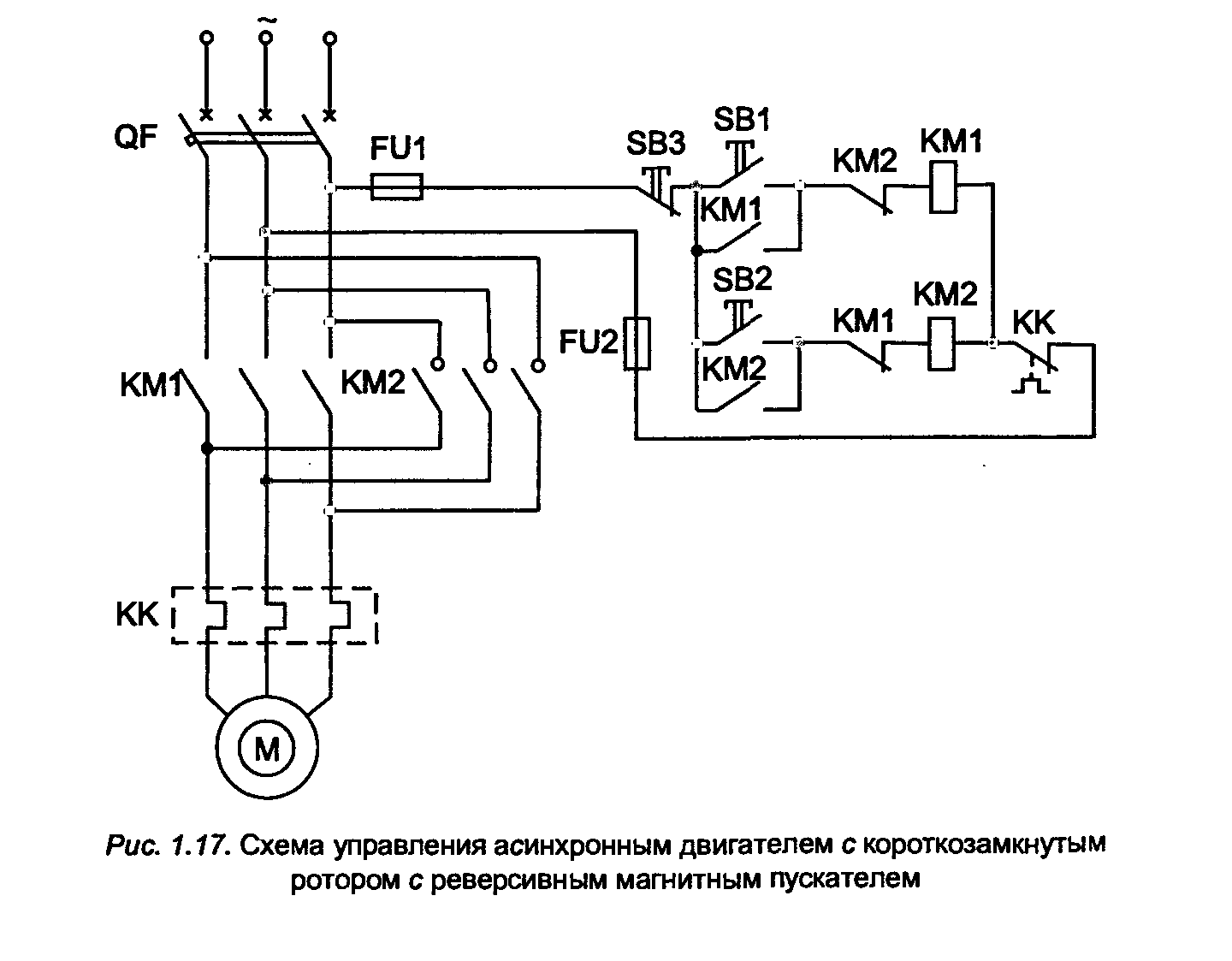
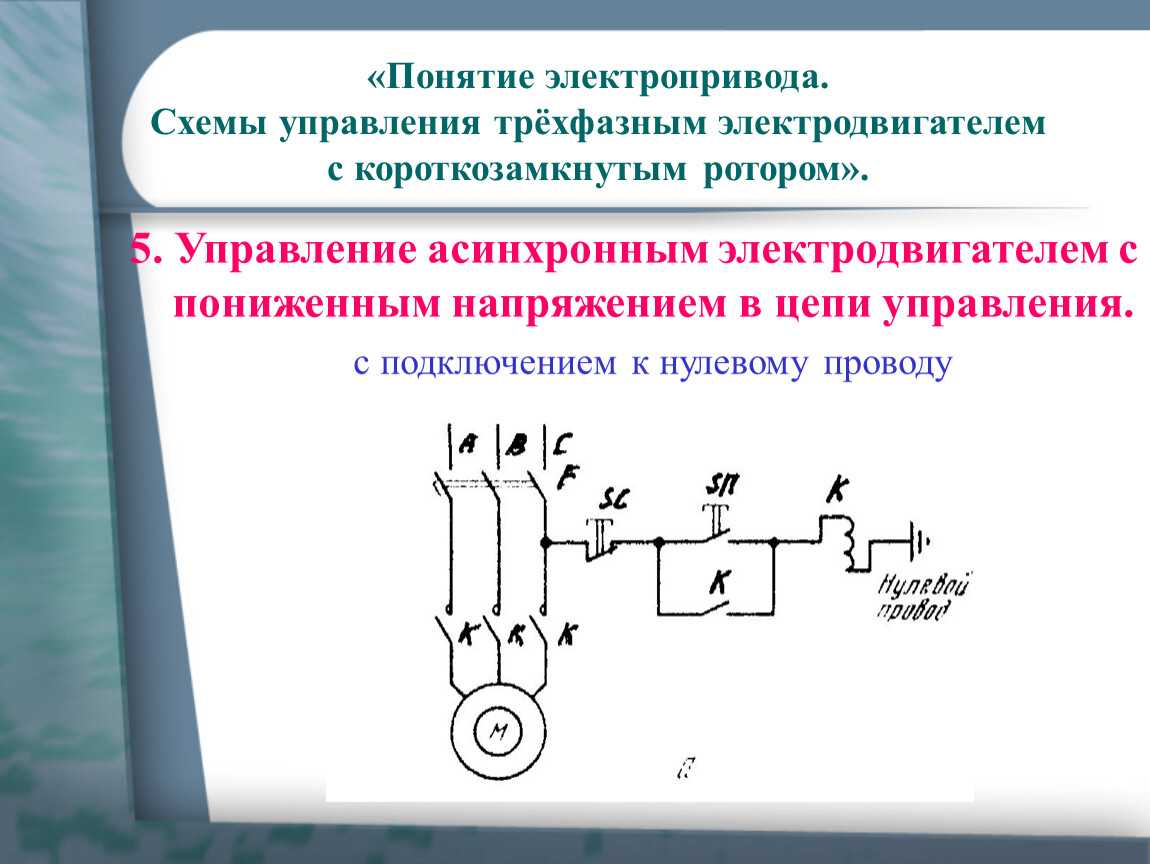
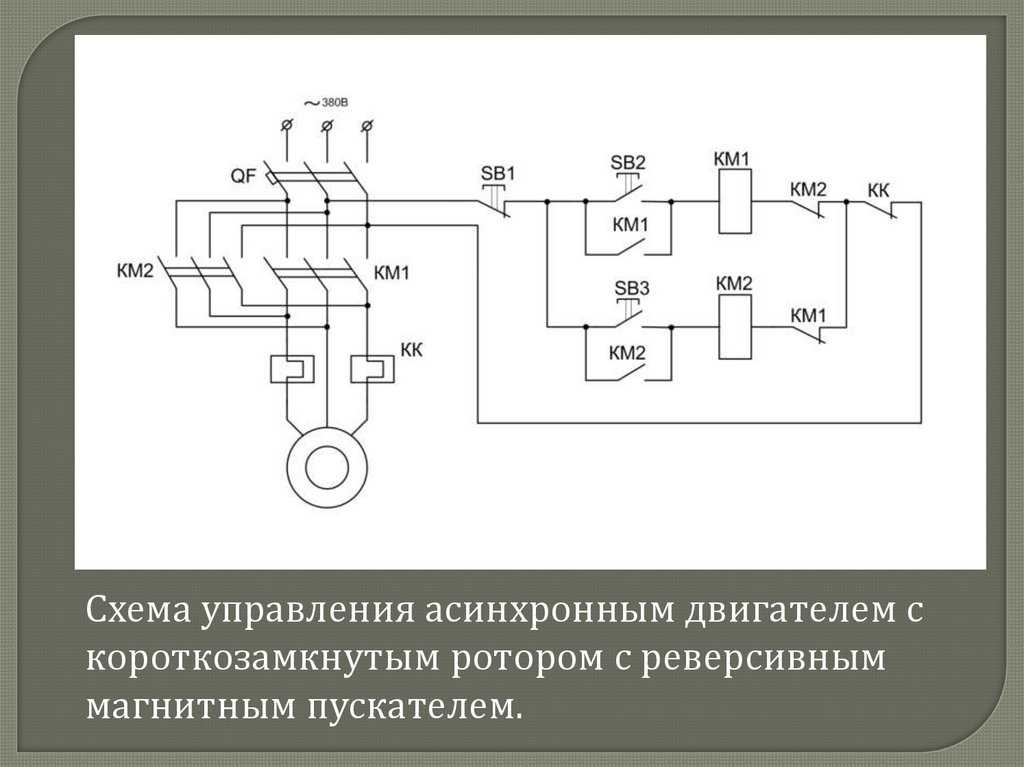
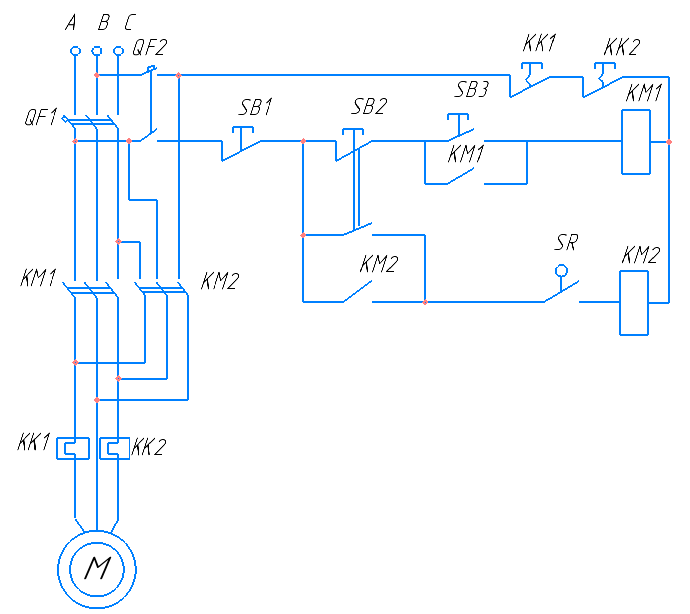
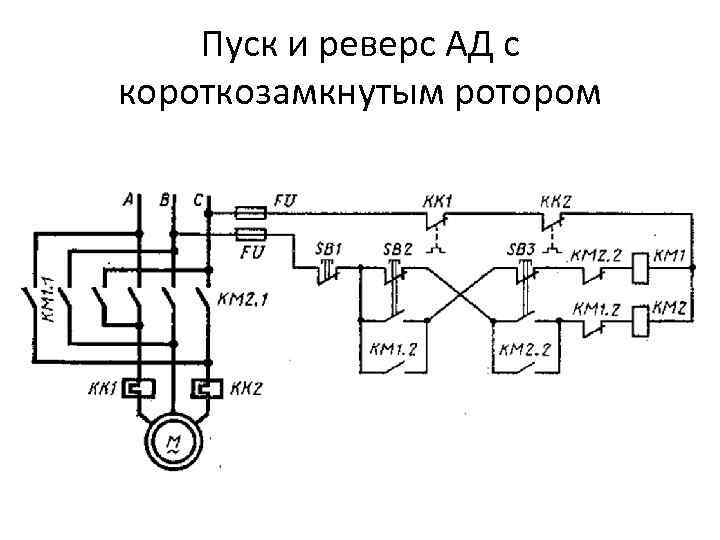
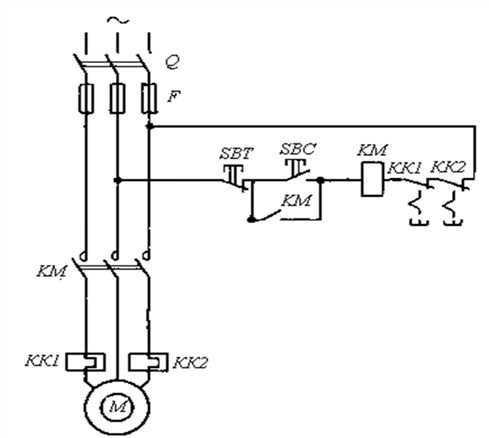
Реверсивный пуск асинхронного двигателя
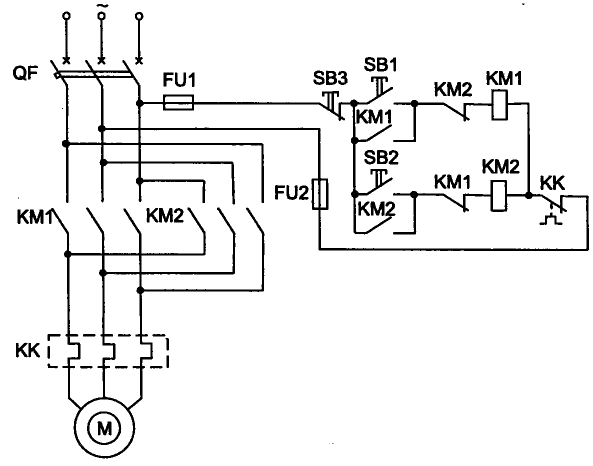
Рисунок 3. Схема реверсивный пуск асинхронного двигателя с кз ротором.
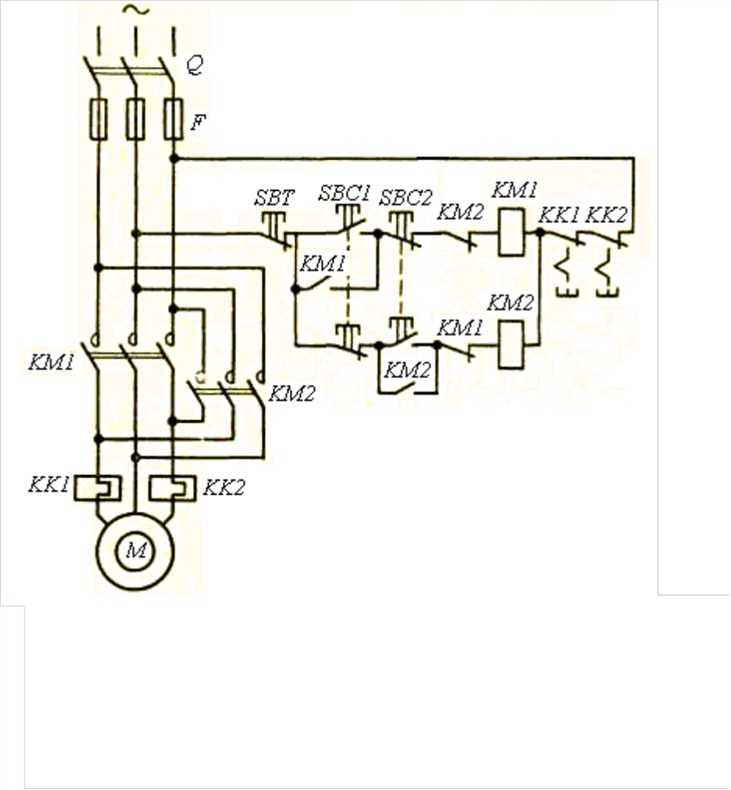
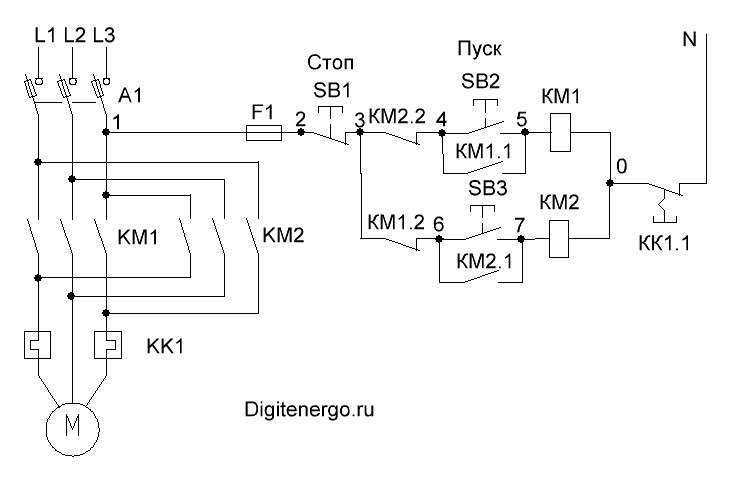
Данная схема дает возможность производить запуск электродвигателя и изменять направленность его вращения. Для запуска необходимо включить автомат QF и нажать SB1 «Пуск», в результате чего ток поступает на магнитный пускатель КМ1, который запитывает статор. АД реверсируется последовательным нажатием кнопок «Стоп» SB3 (КМ1 выключается и двигатель останавливается) и «Реверс» SB2 (срабатывает КМ2 и асинхронный двигатель запускается в реверсивном направлении).
В данной схеме нажатием кнопки реверса меняется чередование фаз питающего напряжения на статоре двигателя, что будет вызывать смену направленности его вращения (реверсом). При помощи нормально замкнутых контактов КМ1 и КМ2 выполнена защита от ошибочного включения сразу двух магнитных пускателей КМ1 и КМ2. Также действуют защиты, аналогичные описанным ранее. Отключить электродвигатель можно кнопкой SB3 и автоматом QF.
Как можно управлять скоростью вращения двигателя?
Очевидно, что двигатель в обычном режиме работы от сети (электрического шкафа) имеет стандартную скорость/частоту вращения. Это ограничивает прямое его использование, вынуждая применять различные редукторные механизмы для понижения частоты до требуемой. Но даже тогда нет возможности динамично менять обороты, а вместе с ними, мощность, подачу, поскольку все равно остаются фиксированными частоты на выходе из двигателя и редуктора. Для расширения существующих рамок используют разные способы управления (частотные, импульсные, фазные и т. д), которые можно разделить на две большие группы:
- Скалярное. Как правило, используется на приводных двигателях компрессорных, вентиляторных, насосных и прочих механизмов, где требуется контроль скорости вращения или любого другого параметра, связанного с датчиками,
- Векторное. Это усовершенствованная концепция, которая предполагает раздельный, независимый контроль, изменение момента и магнитного потока. Токосцепление ротора поддерживается на постоянном уровне, что позволяет сохранить максимальный показатель момента.
Управление асинхронным двигателем
Отличие скалярного от векторного управления как раз заключается в возможности осуществления контроля возбуждения (потока). Фактически, он представляется как двигатель постоянного тока, имеющий независимые друг от друга обмотки. Такой подход позволяет создать подобную математическую модель системы работы контроллера.
Формы и схема векторного управления
Все существующие на сегодня системы векторного управления работой двигателей можно разделить на две группы:
- Датчиковые. Блок управления работой двигателя имеет с ним обратную связь по скорости, с помощью расположения на валу соответствующих датчиков,
- Бездатчиковые. Это системы, которые работают без датчиков скорости на основном валу.
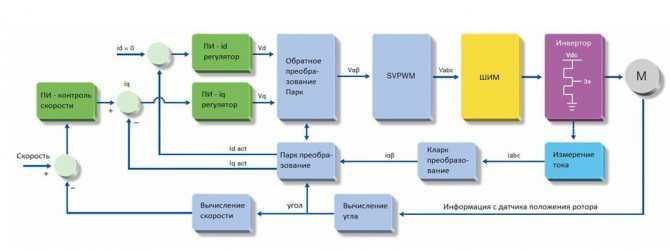
Датчиковые системы являются более сложными, так как точность контроля составляет 1:10000. Бездатчиковые системы работают на уровне не более 1:100. Все частотники с учетом уровня создаваемых помех устанавливаются в центральных или отдельных шкафах. Если представить все выше сказанное как наглядную схему, то получится нечто следующее.

Здесь можно видеть такие ключевые компоненты системы управления, как:
- АД – собственно, асинхронный двигатель (объект контроля),
- БРП – логический блок регуляторов для переменных уравнения,
- БВП – логический блок, отвечающий за вычисления по переменным,
- БЗП – блок, задающий значения переменных,
- ДС – датчик скорости на валу двигателя,
- АИН ШИМ – блок амплитудно-импульсной/широтно-импульсной модуляции.
То, что на схеме отображено в виде блоков, на практике является всего лишь параметрическими элементами цепи управления, которая реализуется на микроконтроллере. Соответственно, сам контроллер и сопутствующие исполнительные механизмы монтируются в электрический шкаф. Для правильного монтажа разрабатывается технологическая карта.
Управление асинхронным двигателем
- Способы подключения асинхронного электродвигателя к сети питания:
- прямое подключение к сети питания
- подключение от устройства плавного пуска
- подключение от преобразователя частоты

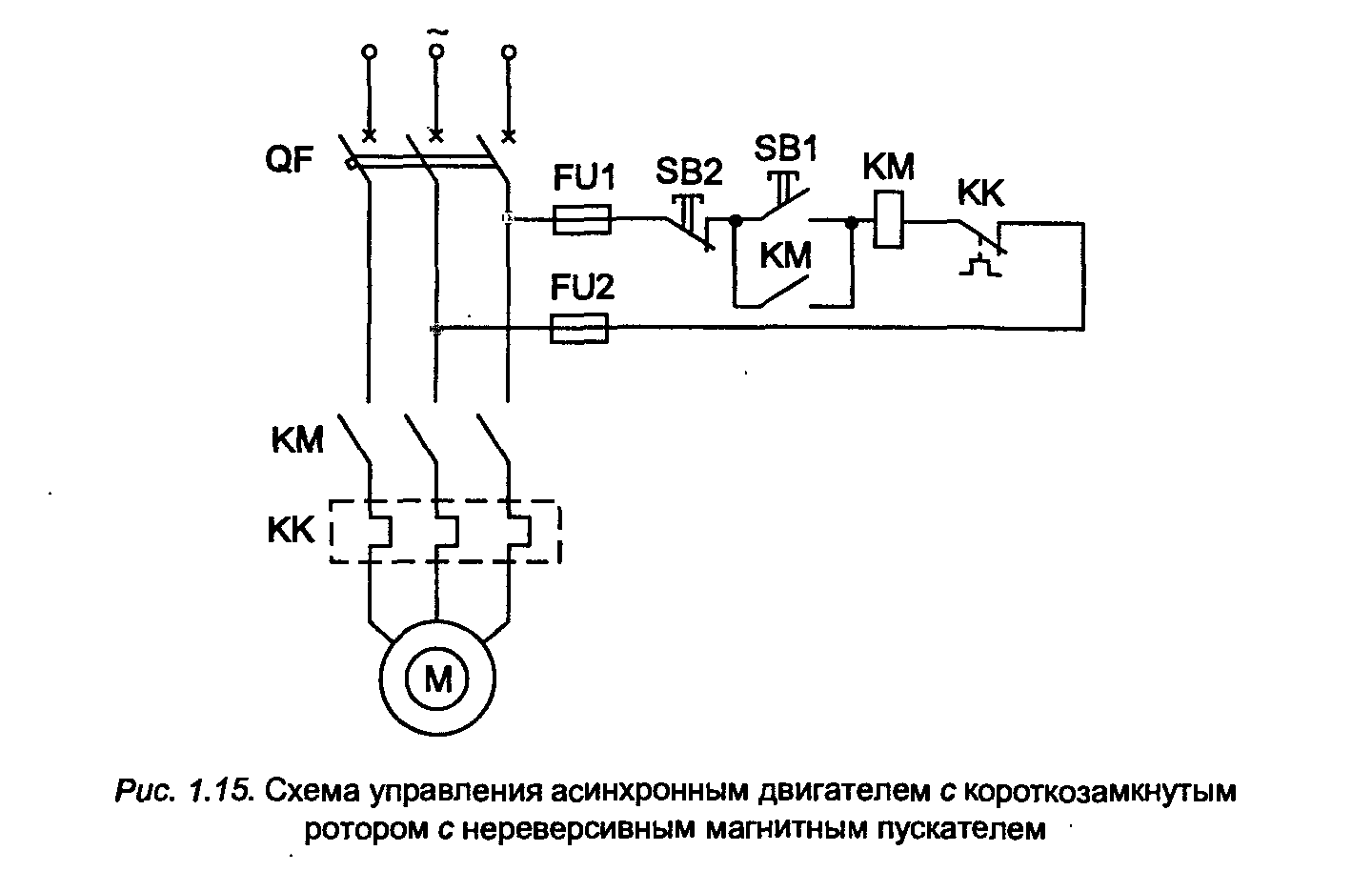
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
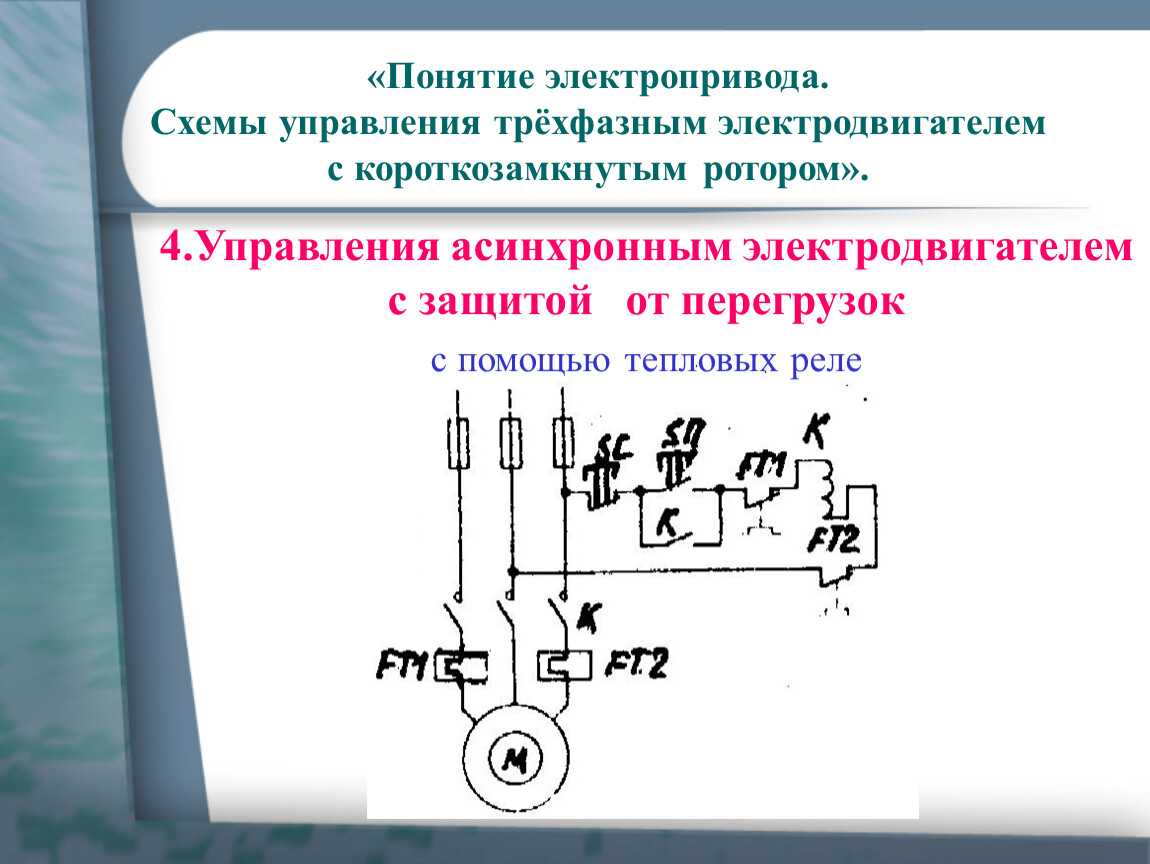
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Реверсивная схема
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
- Использование частотного преобразователя позволяет:
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.

- В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем:
- скалярное управление;
- векторное управление.
Скалярное управление является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования. Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).

Векторное управление используется в задачах, где требуется независимо управлять скоростью и моментом электродвигателя (например, лифт), что, в частности, позволяет поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. При этом векторное управление является самым эффективным управлением с точки зрения КПД и увеличения времени работы электродвигателя.
Среди векторных методов управления асинхронными электродвигателями наиболее широкое применение получили: полеориентированное управление и прямое управление моментом.

Полеориентированное управление позволяет плавно и точно управлять параметрами движения (скоростью и моментом), но при этом для его реализации требуется информация о направлениии вектора потокосцепления ротора двигателя.
- По способу получения информации о положении потокосцепления ротора электродвигателя выделяют:
- полеориентированное управление по датчику;
- полеориентированное управление без датчика: положение потокосцепления ротора вычисляется математически на основе той информации, которая имеется в частотном преобразователе (напряжение питания, напряжения и токи статора, сопротивление и индуктивность обмоток статора и ротора, количество пар полюсов двигателя).

Прямое управление моментом имеет простую схему и высокую динамику работы, но при этом высокие пульсации момента и тока.
Что такое асинхронный двигатель?
Прежде чем переходить к модели, алгоритмам и системам управления электроприводом, нужно точно знать, что он собой представляет. Это позволяет выявить в его цепи такие моменты, которые можно будет использовать для организации плавного изменения ключевых характеристик (частота/скорость вращения, напряжение). Соответственно, можно определить параметры контроллера, разработать технологические карты для его размещения в шкафу и обслуживания.
Работа любого асинхронного двигателя базируется на возбуждении на контактных обмотках магнитного поля при подаче электричества от шкафа управления. Оно возникает на статоре – неподвижной части двигателя, которая состоит из кольцевого сердечника (магнитопровода), собранного из отдельных металлических пластин. Каждая из них имеет концентрические пазы на внутренней стороне кольца, которые при совмещении образуют продольные пазы. Они служат для намотки проволоки, составляющей основу статорной обмотки.
Также асинхронный двигатель имеет подвижную часть – ротор, совмещенный с приводным валом. Он также имеет пластинчатый сердечник с пазами, но уже на внешней стороне. Вместо проволоки используются медные прутки, которые по краям замыкаются пластинами (такой вариант двигателя называется с короткозамкнутым ротором).
За счет того, что частоты вращения магнитных полей статора и ротора отличаются, в обмотках последнего за счет индукции наводится электрический ток. Он, в свою очередь, побуждает электромагнитную силу, приводящую ротор в движение (вращение). Разница частот обычно называется скольжением. Его величина составляет порядка 2…10%.
Кнопочный пост
Данное оборудование предназначается для коммутации, то есть соединения цепей, в которых протекает переменный ток с максимальным напряжением в 660 В и частотой 50 или 60 Гц. Можно эксплуатировать такие устройства и в сетях с постоянным током, но тогда максимальное рабочее напряжение ограничивается 440 В. Возможно применение даже в качестве пульта управления.

Обычный кнопочный пост имеет следующие особенности своей конструкции:
- Каждая из его кнопок лишена фиксации.
- Имеется кнопка «Пуск», которая чаще всего имеет не только зеленый цвет, но и контакты нормально-разведенного типа. Некоторые модели даже обладают подсветкой, которая включается после нажатия. Предназначение — введение в работу какого-либо механизма.
- «Стоп» — это кнопка, обладающая красным цветом (чаще всего). Располагается она на замкнутых контактах, а ее основное предназначение — это отключение какого-либо прибора от источника питания с целью остановки его работы.
- Отличие между некоторыми приборами состоит в материале, который используется для изготовления каркаса. Он может быть сделан из металла или пластмассы. В данном случае корпус играет важную роль, так как имеет определенную степень защиты, зависящую от материала.
Важная ремарка
- Контроллер ЭСУД . Часто его называют просто контроллером системы управления ДВС;
- ECM . Тот самый модуль управления двигателем;
- ECU . Еще один электронный блок управления, однако этим сокращением принято обозначать основу всех электронных управляющих систем автомобиля.
И снова мы возвращаемся к термину ЭБУ и его, если можно так выразиться, универсальности. В действительно встроенных управляющих систем много: непосредственно электронных блок управления двигателем (является наиболее распространенным), центральный блок управления, главный электронный модуль, центральный модуль синхронизации, объединенный моторно-трансмиссионный блок управления, модуль управления подвеской, блок управления тормозной системой, контролер кузова. И это лишь часть возможных вариантов . Часто все системы объединяют под одним термином «компьютер автомобиля»
Однако важно понимать, что:
- Электронная управляющая система состоит из множества блоков и модулей;
- Каждый блок и модуль является специализированным и не может взять на себя задачи другого блока и модуля.
Основным и наиболее часто встречающимся блоком управления является ЭБУ двигателя . Не совсем правильно будет называть его самым важным, но по факту он контролирует работу силового агрегата, а значит, от его работоспособности зависит очень многое. Например, он считывает и оптимизирует ряд важнейших параметров автомобиля: крутящий момент, состав выхлопных газов, мощность, расходник топлива. В тандеме с ЭБУ двигателя работает целая плеяда датчиков. Далее мы будем рассматривать именно ЭБУ двигателя, а обозначать его будем просто как ЭБУ. И еще раз напоминаем: электронных блоков много, однако в рамках данного материала для простоты мы будет обозначать управляющий элемент двигателя как ЭБУ.
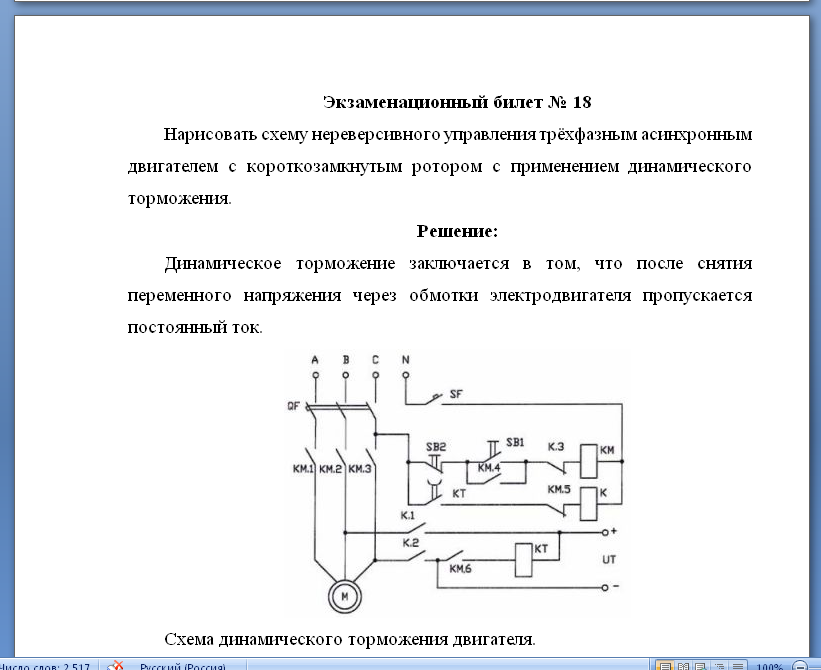
Генераторное рекуперативное торможение
Этот режим наступает, когда частота вращения якоря превышает частоту вращения холостого хода n.
В этих условиях ЭДС машины Еа = сеФn превышает напряжение питающей сети (Еа > Uном), при этом ток якоря, а следовательно, и электромагнитный момент меняют свое направление на противоположное. В итоге машина постоянного тока переходит в генераторный режим и вырабатываемую при этом электроэнергию отдает в сеть. Электромагнитный момент двигателя становится тормозящим и противодействует внешнему вращающему моменту, создаваемому силами инерции вращающего с прежней скоростью якоря (рис. 13.15, а). Этот процесс торможения будет продолжаться до тех пор, пока частота вращения якоря, уменьшаясь, не достигнет значения n
Таким образом, для перехода двигателя в режим генераторного рекуперативного торможения не требуется изменений в схеме включения двигателя.
Генераторное рекуперативное торможение — наиболее экономичный вид торможения, так как он сопровождается возвратом энергии в сеть. Применение этого способа торможения является эффективным энергосберегающим средством в электроприводе Он целесообразен в электротранспортных средствах, работа которых связана с частыми остановками и движением под уклон. В этом случае кинетическая энергия движения транспортного средства (трамвай, троллейбус, электропоезд) преобразуется в электрическую энергию и возвращается в сеть.
Возможен способ перевода двигателя в режим генераторного рекуперативного торможения и при установившейся частоте вращения якоря. Для этого необходимо увеличить в двигателе магнитный поток возбуждения, т.е. ток в обмотке возбуждения.
Из выражения ЭДС якоря Еа = сеФn следует, что с ростом магнитного потока возбуждения Ф при неизменной частоте вращения n ЭДС якоря Еа увеличивается, что ведет к уменьшению тока в цепи якоря:
При ЭДС Еа = U ток якоря Ia = 0, а частота вращения якоря достигает значения n = n. При дальнейшем увеличении потока возбуждения Ф, а следовательно, возрастании ЭДС якоря Еа пограничная частота вращения снижается (см. 13.12, б), а частота вращения якоря, оставаясь практически неизменной за счет сил инерции вращающихся частей электропривода, начинает превышать пограничную частоту n. При этом ЭДС якоря превышает напряжение сети и двигатель переходит в режим генераторного рекуперативного торможения.
1.Устройство системы пуска двигателя
В обычной системе пуска двигателя можно выделить три основных механизма
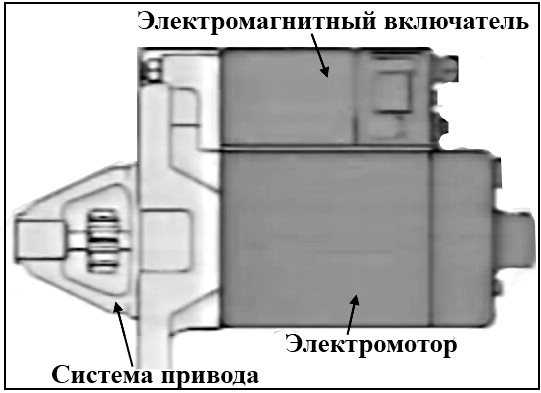
- Электромотор – создает вращающий момент.
- Система привода – передает вращение на двигатель.
- Электромагнитный включатель – приводит ведущую шестерню стартера в зацепление с ободом маховика, а также дает электрический ток в электромотор.
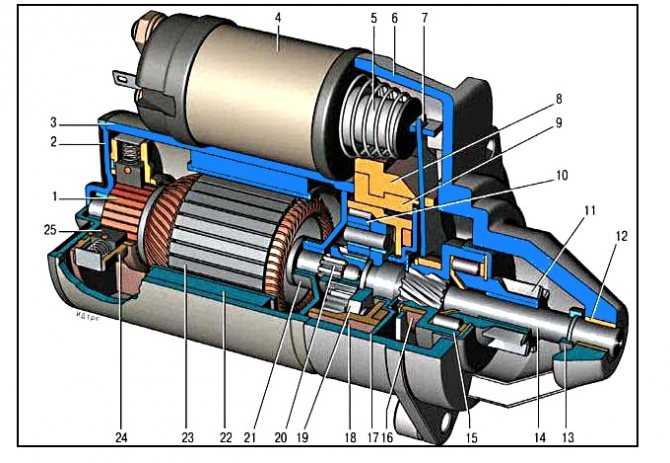
Рассмотрим электромотор системы пуска, создающий вращающий момент. Корпус электромотора выполнен из стали и имеет внешний вид цилиндра. Внутри корпуса имеются обмотки возбуждения, намотанные вокруг сердечников, прикрепленных к корпусу. Эти обмотки выполнены из толстой токопроводящей проволоки, способной выдержать сильный электрический ток. Обмотки генерируют электромагнитное поле, способное вращать якорь стартера. Одним из элементов якоря является сердечник, с канавками вдоль которого располагаются витки обмоток якоря. Оба конца каждой обмотки подключены к коллектору. Вращающие моменты, создаваемые каждой из обмоток, складываются, чтобы можно было вращать якорь, точнее вал якоря. Если посмотреть на стартер со стороны коллектора, то на якоре видно щеткодержатель.
| Якорь стартера состоит из вала, сердечника с пазами на которые устанавливается обмотка стартера. Для подробного изучения предлагаю воспользоваться схемой устройства якоря стартера. |
| Втягивающее реле служит для подачи тока на мотор стартера и вводит бендикс в зацепление с маховиком для запуска двигателя. Устройство втягивающего реле, неисправности тягового реле. Как определить неисправности втягивающего реле? |
Рассмотрим, как устроен щеткодержатель в щеткодержателе объединены 4 щетки, прижимаемые к коллектору. Две из четырех щеток находятся в изолированных оправках и соединены с обмотками якоря и далее через коллектор с обмотками возбуждения. Те и другие заземлены на корпус.
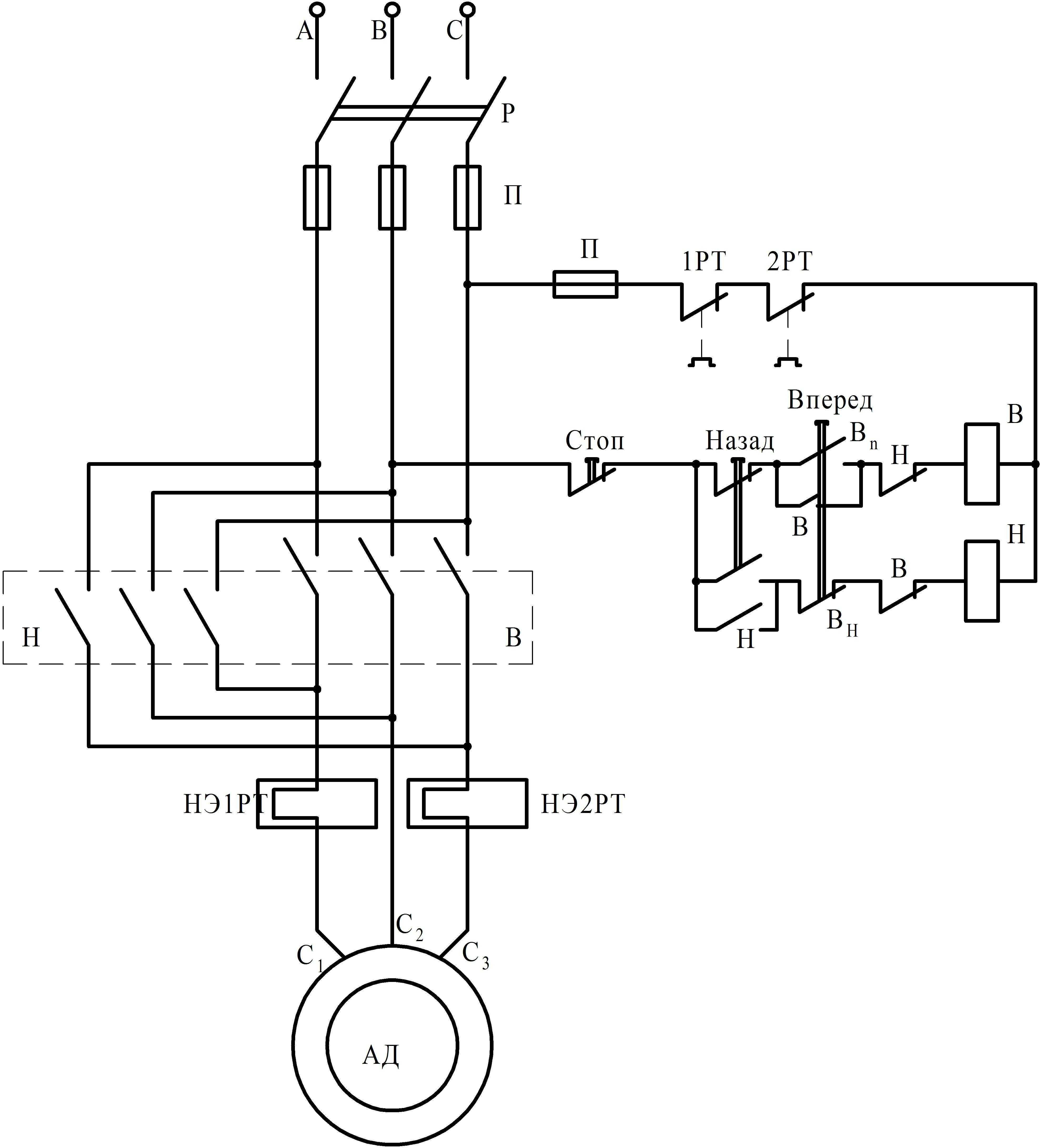
Управление электроприводами с асинхронными электродвигателями с фазным ротором
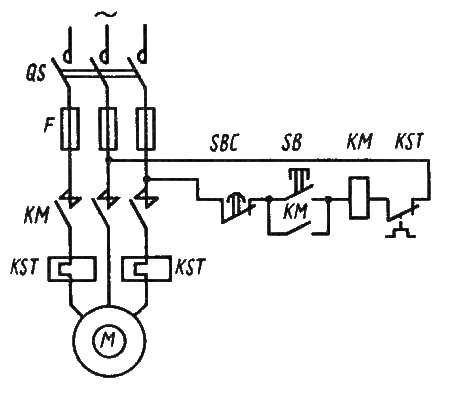
Схема управления в функции времени (рис. 10). Эта схема является типичной для двигателей длительного режима с использованием маятниковых реле времени. При нажатии кнопки «Пуск» включается контактор Л. При включении контактора Л начинает работать маятниковое реле, которое через заданный промежуток времени включит своими контактами контактор 1У. Далее процесс повторяется. Замыкающий блок-контакт Л (1—2) предназначен для облегчения работы контактов маятникового реле.
Схема управления в функции времени с несколькими реле времени (рис.11).
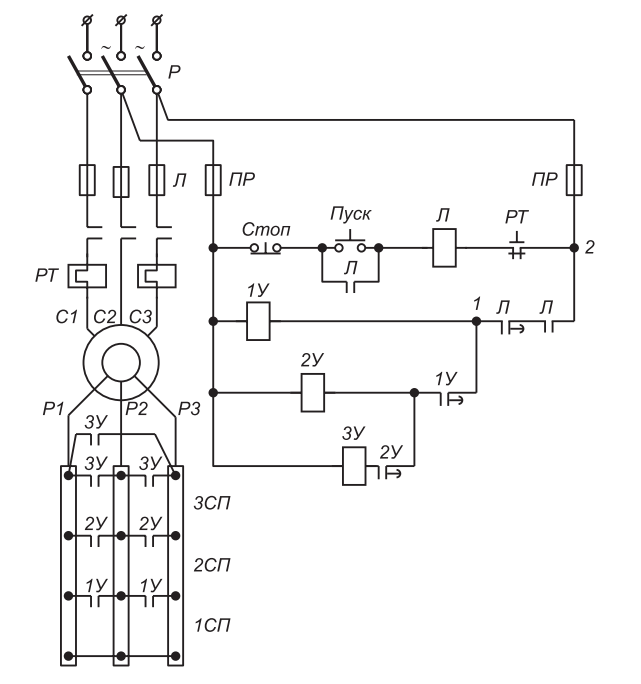
Рис. 10. Схема управления асинхронным электродвигателем с фазным ротором в функции времени
Асинхронный электродвигатель с фазным ротором пускают с помощью пусковых реостатов, состоящих из нескольких ступеней, включаемых в фазы обмоток ротора.
При нажатии на кнопку «Пуск» катушка магнитного пускателя ПМ получает питание, и электродвигатель включается на полное сопротивление пускового реостата. Одновременно включается реле времени 1РВ, которое через выдержку времени, достаточную для разгона двигателя на этой ступени, включает контактор 1К, и он своими контактами закорачивает первую ступень пускового реостата. Блок-контакты контактора блокируют катушку 1К и отключают реле времени 1РВ.
Включается одновременно с катушкой 1К реле времени 2РВ, которое через заданную выдержку времени включает второй контактор 2К, а он отключает вторую ступень пускового реостата. Третья ступень пускового реостата отключается аналогично.
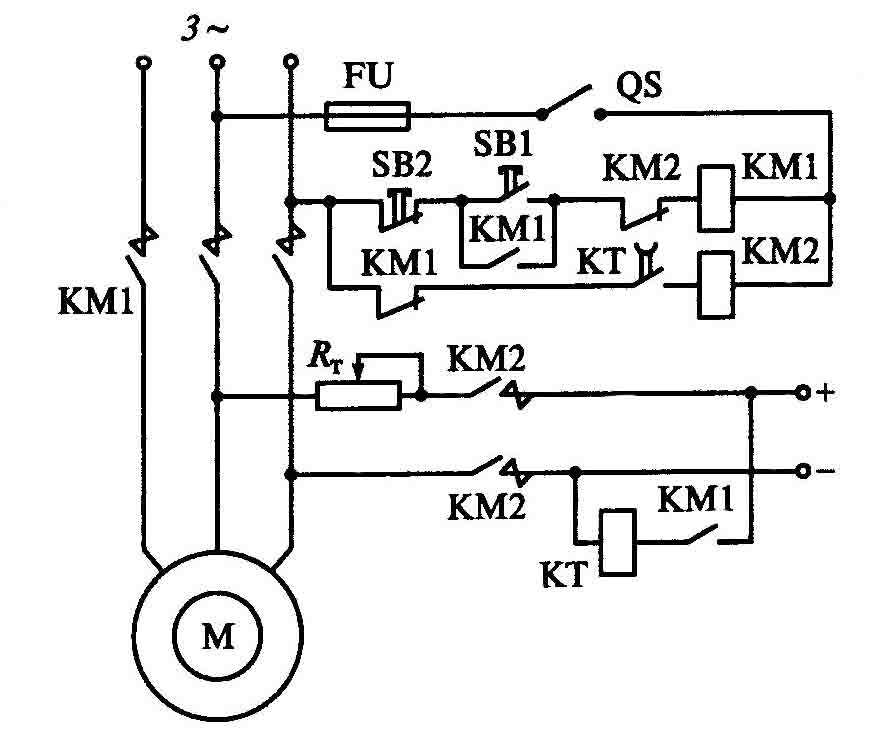
Необходимо обеспечивать выбор правильных выдержек времени реле 1РВ, 2РВ и 3РВ. Чрезмерно большие выдержки времени затягивают процесс пуска, а заниженные — не обеспечивают разгон до нужной скорости и вызывают повышенные броски тока. При нажатии на кнопку «Стоп» электродвигатель отключается, и все ступени пускового реостата включаются по фазам ротора.
Схема управления в функции тока (рис. 12). В роторную цепь включены катушки токовых реле ускорения 1РУ, 2РУ, 3РУ, настроенные на срабатывание при токах I1РУ, I2РУ, I3РУ. Контактор 1У включается при спаде силы пускового тока в роторной цепи до значения, соответствующего уставке реле 1РУ.
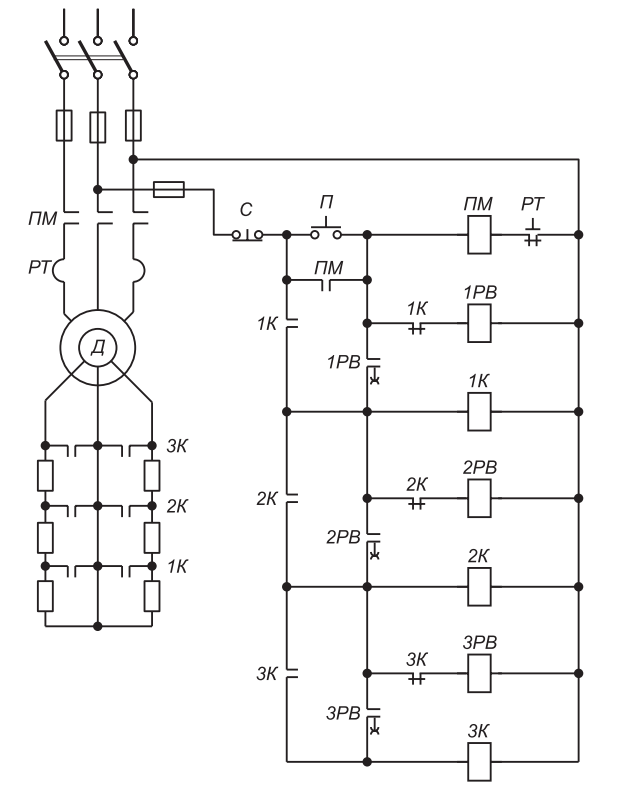
Рис. 11. Электрическая схема управления асинхронным электродвигателем с фазным ротором
При большей силе тока в цепи ротора размыкающий контакт 1РУ будет разомкнут. Реле ускорения 2РУ и 3РУ, контакторы 2У и 3У работают так же. Из-за возможности вибраций размыкающих контактов реле ускорения 1РУ, 2РУ и 3РУ предусмотрено их шунтирование размыкающими блок-контактами 1У, 2У и 3У. Реле блокировки РБ создает выдержку времени, пока сила тока в роторной цепи не достигнет значения, при котором сработает реле ускорения.
Схема управления в функции частоты (рис. 13). Работа этой схемы обеспечивается с помощью частотных реле 1ЧР, 2ЧР и 3ЧР, катушки которых включены в цепь ротора. Магнитный поток реле создается совместным действием магнитодвижущих сил катушки и короткозамкнутого витка (гильзы). При пуске, т.е. при большой частоте переменного тока в роторе двигателя, размагничивающее действие тока, протекающего по витку, будет велико, и магнитный поток реле будет относительно мал. При уменьшении частоты тока в роторе магнитный поток реле возрастает, так как происходит уменьшение тока в короткозамкнутом витке. При каком-то определенном значении частоты якорь притягивается и замыкает контакты реле частоты (1ЧР, 2ЧР и 3ЧР) в цепи контактора ускорения (1У, 2У и 3У). При оживлении током катушки контактора ускорения происходит шунтирование его контактами соответствующей ступени пускового сопротивления, включенного в цепь ротора. Частотные реле должны быть настроены на определенные частоты.
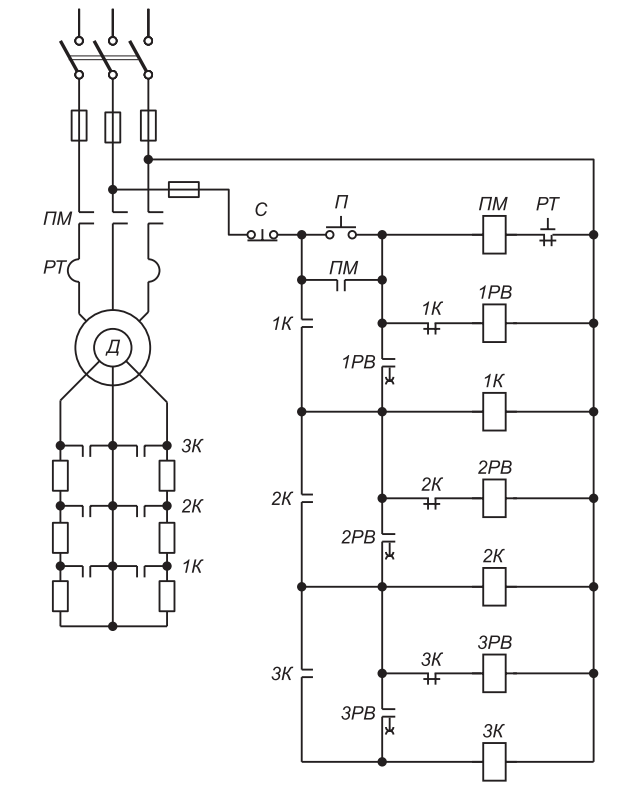
Рис. 12. Схема управления асинхронным электродвигателем с фазным ротором в функции силы тока
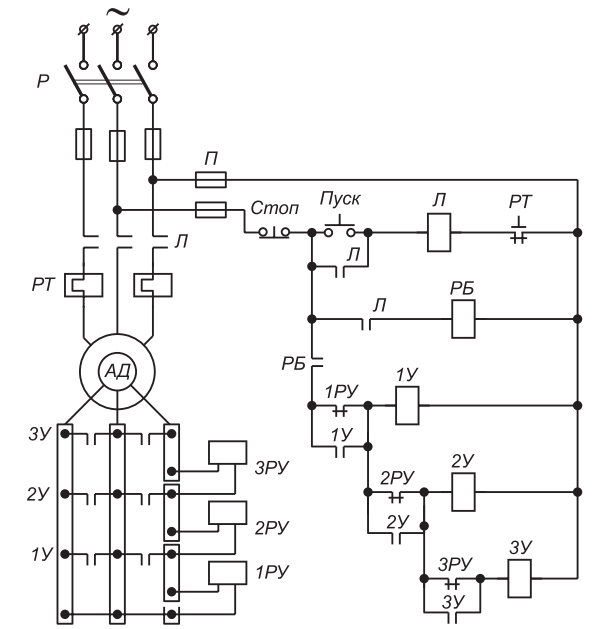
Рис. 13. Схема управления асинхронным электродвигателем с фазным ротором в функции частоты
Схемы управления асинхронным двигателем в формате dwg
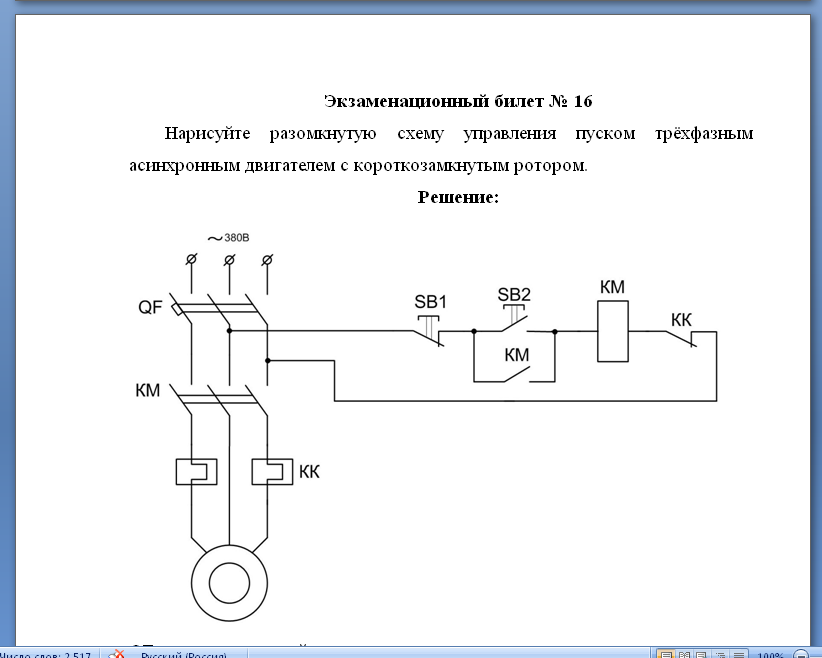
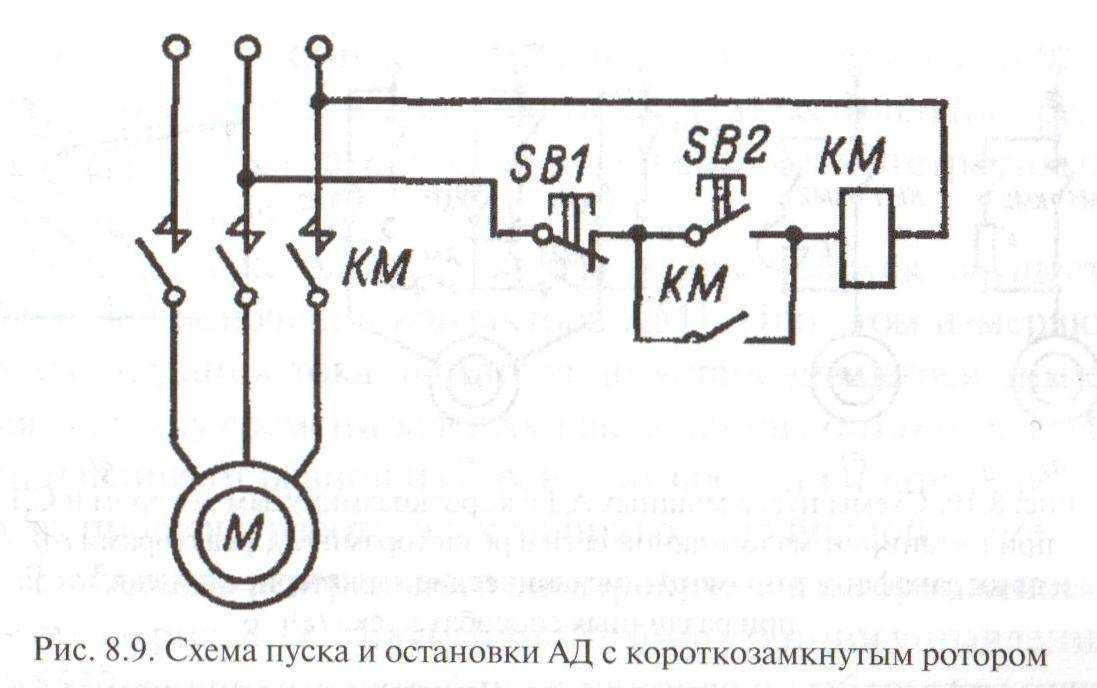
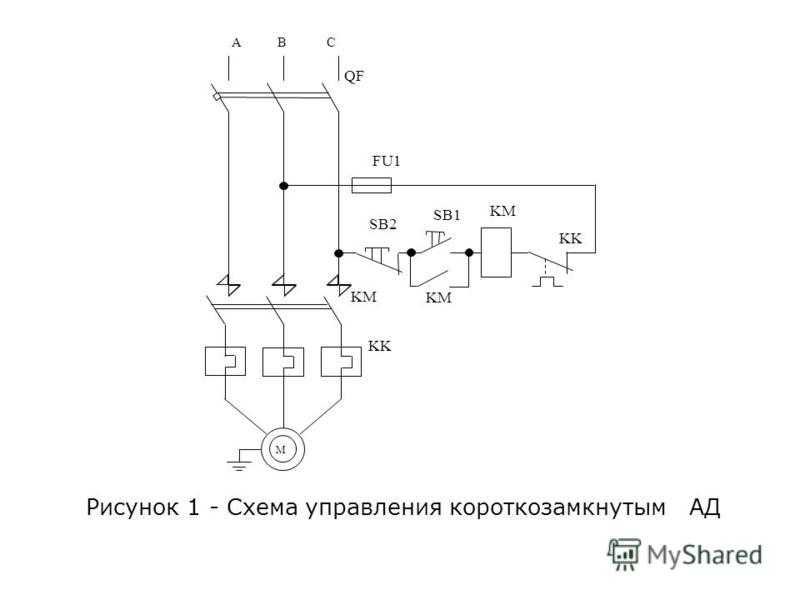
В данной статье речь пойдет о схемах управления асинхронным двигателем (АД). В настоящее время существуют три наиболее часто используемые схемы управления асинхронным двигателем с короткозамкнутым ротором:
- схема управления нереверсивным двигателем – «прямой пуск»;
- схема реверсивного управления двигателем;
- схема управления двигателем «звезда-треугольник».
В конце данной статьи, вы сможете скачать данные схемы выполненные в программе AutoCad в формате dwg.
Вывод
ЭБУ двигателя – это, пожалуй, самый ответственный элемент бортовой электросистемы автомобили. Благодаря нему силовой агрегат имеет оптимальную производительность, состав выхлопа и высокую стабильность работы. Неисправности в работе ЭБУ возникают часто, но в большинстве случаев они обусловлены проблемой с каким-либо электрическим и электромеханическом элементом автомобиля. Если проблема кроется именно в ЭБУ, то нередко единственным способом ее решения является… дорогостоящая замена блока. Советуем обращаться к проверенным специалистам для диагностики, а уже потом строить планы по покупке необходимых запчастей и дальнейшей их установке.