

Как управлять манипулятором без микроконтроллера?
Педро Ней Строски
/
11 ноября 2021 г.
Можно управлять манипулятором без микроконтроллера, используя простые электронные схемы. Этот пост показывает, как.
Электронная схема
Серводвигатель
Перед построением электронной схемы необходимо определить, какой серводвигатель будет использоваться на манипуляторе. Был выбран микросерво 9g SG90 башни Pro.
Техническое описание этого сервопривода доступно по этой ссылке.
Создание электронной схемы
Каждый серводвигатель может управляться схемой 555, которая генерирует сигнал прямоугольной формы и управляет длиной волны этого сигнала.
Нажмите кнопку ниже, чтобы получить доступ к сообщению о широтно-импульсной модуляции.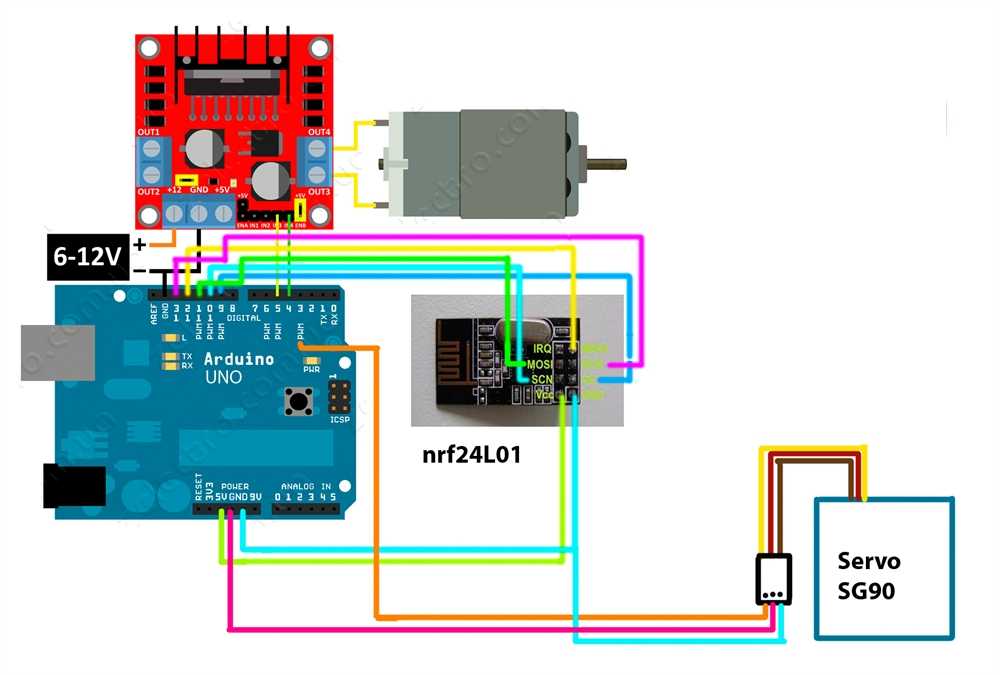
ШИМ Нажмите здесь
Электронная плата, которая будет управлять 4 сервоприводами манипулятора.
Источник питания постоянного тока излучает сигналы помех, которые заставляют сервоприводы дрожать во время движения. Чтобы избежать этого, конденсаторы были поставлены параллельно клеммам питания (конденсатор Cp на схеме). Минимальное значение должно быть 220 мкФ. Я поставил 3 по 220 мкФ и 1 по 470 мкФ. Всего 4 конденсатора, т.к. используются 4 цепи, по одной на каждый серводвигатель.
Полный список:
- 4 555 фишек.
- 4 потенциометра 10 кОм.
- 8 диодов 1N4148.
- 4 резистора 1,5 кОм.
- Провода.
- 4 Электролитические конденсаторы 1 мкФ x 50 В.
- 4 электролитических конденсатора 220 мкФ x 16 В.
- Печатная плата 15 х 3,7 см.
Сборка манипулятора
Манипулятор изготовлен из акрила и имеет 4 степени свободы. В этом посте я пошагово покажу как его собрать.
Основание
Детали для сборки основания.
Сборка деталей.
Сервопривод должен быть помещен в прямоугольное пространство сверху, используя эту часть.
В дополнение к первым 4, в этом наборе есть еще 3 типа винтов.
Для каждого отверстия необходимо использовать винт нужной длины, чтобы удерживать одну или несколько деталей. Кончик винта не должен быть виден.
Мобильный бокс
Каждый сервопривод SG90 поставляется с 3 винтами и 3 пластиковыми фланцами, как показано на рисунке ниже.
Деталь ниже — это основание мобильного ящика, которое должно быть связано с сервоприводом основания.
Для соединения фланца с акриловыми деталями необходимо использовать более длинные винты, поставляемые с сервоприводом.
Сборка одной из сторон.
Более короткий винт, поставляемый с SG90, служит для крепления фланца к валу серводвигателя.
Другая сторона не так уж отличается.
Сборка средней части.
Соединение частей мобильной коробки.
Программирование работы с сервомотором на микроконтроллере PICF877A
Прежде чем приступать к программированию работы с сервомотором необходимо знать что управляющим сигналом для него является ШИМ сигнал и угол поворота оси сервомотора зависит от коэффициента заполнения ШИМ сигнала как показано на следующем рисунке.

Частота управляющего сигнала ШИМ для каждого сервомотора разная и ее необходимо уточнять в даташите на конкретную модель серводвигателя, однако для большинства используемых в настоящее время сервомоторов она равна 50 Гц.
Параметры ШИМ сигнала для сервомотора MG995 приведены на следующем рисунке.
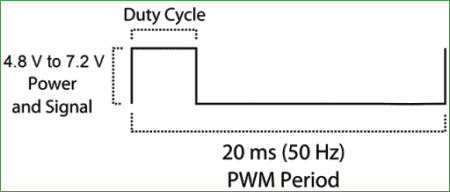
То есть если частота ШИМ сигнала для этого сервомотора равна 50 Гц, то период данного сигнала равен 20ms. В нашей предыдущей статье про ШИМ в микроконтроллерах PIC мы использовали частоту ШИМ сигнала равную 5 кГц. Поэтому для управления сервомотором MG995 такой ШИМ сигнал не подойдет.
И здесь существует определенная проблема, которая заключается в том, что микроконтроллер PIC16F877A не может формировать ШИМ сигналы с такой низкой частотой как 50 Гц используя модуль CCP. В соответствии с даташитом на него минимальная частота ШИМ сигнала в данном случае равна 1,2 кГц. Поэтому модуль CCP нам в данном проекте ничем не поможет.
Поэтому в данном проекте для формирования ШИМ сигнала с частотой 50 Гц мы будем использовать таймер. Более подробно об использовании таймеров в микроконтроллерах PIC вы можете прочитать в данной статье.
Мы установим для нашего таймера частоту предделителя 32 и сделаем так чтобы он переполнялся каждую 1 мкс. В этом случае общее время on и off для нашего ШИМ сигнала составит величину 20ms – то, что нам необходимо.
C
OPTION_REG = 0b00000100; // Timer0 with external freq and 32 as prescaler
TMR0=251; // Load the time value for 1us delayValue can be between 0-256 only
TMR0IE=1; //Enable timer interrupt bit in PIE1 register
GIE=1; //Enable Global Interrupt
PEIE=1; //Enable the Peripheral Interrupt
|
1 |
OPTION_REG=0b00000100;// Timer0 with external freq and 32 as prescaler TMR0=251;// Load the time value for 1us delayValue can be between 0-256 only TMR0IE=1;//Enable timer interrupt bit in PIE1 register GIE=1;//Enable Global Interrupt PEIE=1;//Enable the Peripheral Interrupt |
Таким образом, внутри нашей функции обработки прерывания от таймера мы будем подавать уровень high на контакт RB0 на определенное время time и подавать на него уровень low на оставшееся время периода (20ms – on_time). Значением этого времени time мы будем управлять с помощью потенциометра, сигнал с которого будет подавать на модуль АЦП микроконтроллера.
C
oid interrupt timer_isr()
{
if(TMR0IF==1) // Timer has overflown
{
TMR0 = 252; /*Load the timer Value, (Note: Timervalue is 101 instaed of 100 as the
TImer0 needs two instruction Cycles to start incrementing TMR0 */
TMR0IF=0; // Clear timer interrupt flag
count++;
}
if (count >= on_time)
{
RB0=1; // complement the value for blinking the LEDs
}
if (count >= (on_time+(200-on_time)))
{
RB0=0;
count=0;
}
}
|
1 |
oid interrupttimer_isr() { if(TMR0IF==1)// Timer has overflown { TMR0=252;/*Load the timer Value, (Note: Timervalue is 101 instaed of 100 as the TImer0 needs two instruction Cycles to start incrementing TMR0 */ TMR0IF=;// Clear timer interrupt flag count++; } if(count>=on_time) { RB0=1;// complement the value for blinking the LEDs } if(count>=(on_time+(200-on_time))) { RB0=; count=; } } |
А внутри нашей функции loop мы просто будем считывать значение с потенциометра и в соответствии с ним обновлять значение переменной on_time, которая и будет задавать коэффициент заполнения формируемого нами ШИМ сигнала.
C
while(1)
{
pot_value = (ADC_Read(4))*0.039;
on_time = (170-pot_value);
}
|
1 |
while(1) { pot_value=(ADC_Read(4))*0.039; on_time=(170-pot_value); } |
Таким образом мы сформируем ШИМ сигнал с периодом 20ms и переменным коэффициентом заполнения, задаваемым с помощью потенциометра. Полный код программы проекта вы можете посмотреть в конце статьи.










Примечания и ссылки
| Радиоуправляемые устройства | Самолет · Вертолет · Планер ( горячая линия ) · Параплан | |
|---|---|---|
| Бренды | AIRTRONICS · Berkeley Модели · BMI-Models · Ente Scambi Coloniali Internazionali · Лягушка · Futaba · Graupner · GWS · Heller · Hitec · Hirobo · HobbyZone · Horizon Hobby · Multiplex · PacMin · Paul K. Guillow, Inc. · Ripmax · Thunder Tiger · Валькера | |
| Шаблоны | Стрекоза 53 · Picoo Z · T-Rex | |
| Технический | Перезаряжаемый литиевый · Нет коллективного · Не фиксированного · Аппарат перекоса · Счетчик роторов · Привод | |
| Ассоциации и пресса | Авиамоделирование ассоциация Северной Ирландии · Авиамоделирование академия · Модель самолета ассоциация Австралии · Модель самолета Ассоциация Канады · Модель самолета Новости · RC вертолет | |
| Связанные личности | Энди Леннон · Фабьен Турпо · Гордон Берфорд · Хуан Санчес Видаль · Лука Якони Стюарт | |
| Разные | Любительская ракетная техника · Внутри помещений · На открытом воздухе · Мир дизайна и моделей сокращается · Полет по кругу · Свободный полет |
Подпрограмма output
В данной подпрограмме выполняются все «полезные» действия, по которым мы можем судить о функционировании микроконтроллерного устройства. Нам необходимо получить на выходе вот такую функцию:
Состояния выходов в дискретные моменты времени, определяемые установкой флага задания TF, получим табличным методом, для этого в память программ поместим таблицу соответствующих значений. Табличная реализация различных вычислений в микроконтроллере характеризуется максимальным быстродействием, но при этом требует много места в памяти программ. Например, в нашем случае надо задать 60 значений, что требует 60 ячеек памяти.
В подпрограммах содержатся инструкции:
OUTPUT decfsz COUNTER, Fgoto NOT0movlw 0x3Cmovwf COUNTERNOT0 movf COUNTER, Wcall TABmovwf PORTBreturn
Инструкция «decfsz» предназначена для организации циклов. Она декрементирует содержимое регистра COUNTER, в случае если результат не равен нулю, выполняется следующая по порядку инструкция (переходим на метку NOT0), иначе в течение 2 циклов выполняется пустая инструкция «nop», а затем в регистр COUNTER помещается начальное значение 0x3C (заметьте, т.к. декремент регистра осуществляется до использования значения этого регистра в программе, при инициализации мы задали значение на 1 большее).
Значение регистра COUNTER помещается в аккумулятор W, после чего осуществляется чтение из таблицы путем вызова подпрограммы инструкцией «call TAB». При возврате из таблицы в W содержится необходимое нам значение состояния выходов. Это значение записывается в регистр PORTB, чем осуществляется вывод сигналов из микроконтроллера. Далее происходит возврат из подпрограммы командой «return».
Области использования устройства
В современном мире, когда автоматизация заняла прочное место во всех областях машиностроения, конструкция всех механизмов стала удивительно унифицированной. В этом случае используются современные одинарные приводы.
Чтобы понять, что такое сервопривод, вы должны знать диапазон действия устройства.
Устройства содержат прецизионные конструкции для поддержания скорости промышленных роботов и станков с высокой точностью. Их устанавливают на буровое оборудование, в различные транспортные системы и вспомогательные механизмы.
Наибольшее распространение устройства получили в следующих областях:
- производство бумаги и упаковки;
- производство листового металла;
- погрузочно-разгрузочные работы;
- производство транспортных средств;
- деревообрабатывающая промышленность;
- производство строительных материалов.
Простой таймер на микроконтроллере PIC12F675. Схема и описание
Этот простой таймер на микроконтроллере может использоваться для переключения любой нагрузки в интервале времени от 30 минут до 6 часов. Первоначальная задача этого таймера была — управление вытяжкой в ванной комнате.
Схема и конструкция таймера исходит из требований, которые я хотел реализовать в нем, а именно использовать одну кнопку, один потенциометр (220 кОм) и два светодиода.
Использование интегрального таймера NE555 не заслуживало моего внимания. Можно было бы использовать микросхему HCF4541B, но для этого мне бы пришлось для заданного интервала времени использовать относительно стабильный генератор с частотой 3-36 Гц.
В конце концов, я решил использовать микроконтроллер PIC12F675. Положение потенциометра сканируется внутренним АЦП микроконтроллера, а тактовый сигнал 32,768 кГц используется в качестве источника синхронизации. Для данной цели точности более чем достаточно, кроме того, я обошелся минимумом деталей.
Разрешение АЦП я снизил до 8 бит. Вся дорожка потенциометра условно поделена на 255 шагов по 80 секунд каждая. Минимальный интервал времени задал 30 минут (потенциометр в крайнем положении).
Отсюда максимальное время составляет 30 минут + 255 x 80 секунд = примерно 6 часов и 10 минут. Простое изменение пары констант в исходнике, позволяет установить произвольные временные интервалы.
Скачать прошивку (554 bytes, скачано: 158)
Управлять таймером просто — вращением ползунка потенциометра, устанавливаем необходимый интервал времени и нажимаем кнопку.После нажатия на кнопку выполняется преобразование АЦП и начинает обратный отсчет. При повторном нажатии кнопки обратный отсчет останавливается и таймер сбрасывается.
www.tosi.cz
Управление дхо на микроконтроллере pic12f629 – схема-авто – поделки для авто своими руками
При запуске и остановке автомобиля устройство будет автоматически включать дневные ходовые огни (DRL). Для этого проекта используется простой и недорогой микроконтроллер PIC12F629. Устройство имеет звуковой сигнал и другие полезные функции.
Краткая логика работы устройства
1.Питание 12в2.При вкл зажигания после прохождения 6 импульсов с датчика скорости вкл ДХО3.При вкл габаритов все переходит в штатный режим4.При выкл габаритов переходим п.25.При остановке (например в пробке) ДХО выключится через 3 мин при начале движения п.26.При остановке и выключении зажигания, ДХО горит ещё 20 секунд и выключается (вежливая подсветка).
Как работает прибор:
1. когда устройство выключено, светодиод HL1 мигает один раз в секунду (1 Гц), указывая, что устройство находится в ждущем режиме.
2.При включении зажигания светодиод HL1 начинает светиться постоянно, микроконтроллер ожидает поступления импульсов от датчика скорости, и когда вы начинаете движение автомобиля, через 1 секунду автоматически зажигаются предохранители выхлопа и остаются включенными все время движения до остановки автомобиля.
3.Во время остановки активируется режим задержки времени выключения света (3 минуты), об этом сигнализирует встроенный бипер (2 коротких гудка – это при включенном зажигании и остановке автомобиля), если в это время выключить зажигание (например, во время длительной стоянки), прозвучит 4 коротких гудка, сигнализирующих о том, что активирован режим задержки времени включения света на 20 секунд и затем они выключаются (режим вежливого освещения), устройство переходит в режим ожидания.
4. При включении габаритных огней устройство переходит в режим ожидания, ЛДГ отключаются (в соответствии с правилами дорожного движения), и все продолжает функционировать в обычном режиме.
Предупреждающий сигнал об опасности можно включить, включив зажигание, подав 2 звуковых сигнала, а затем сразу же выключив его (звуковой сигнал 4 раза); после этого устройство автоматически переключается в режим предупреждающего сигнала об опасности. Если вы хотите выключить габаритные огни, не дожидаясь задержки времени, включите габаритные огни, а затем выключите их.
Светодиод H L2 показывает, работают ли фары ближнего света (включен, если не работают).
Это устройство можно использовать для автоматической коммутации, если реле допускает максимальный ток 10 А.
БС
Если вы хотите использовать дополнительное реле, например, SLC – 12VDC – SL – C, максимальный ток контакта составляет 30A, что достаточно для управления BS. Диоды HL1 и HL2 должны быть установлены в удобном месте, например, на приборной панели. Кроме того, ЗУМ должен быть установлен в удобном месте. На рисунке схемы показаны светодиоды на печатной плате. Установка бесплатна!
!
Внимание. При прошивке микроконтроллера необходимо сохранить калибровочную константу, иначе устройство не сможет работать
С КАЧАТЬ… – Рисунок печатной платы (LAY), демо-версию прошивки и модель под PROTEUS
Автор; Федор Бросалин
В рамках макетирования
Общий
Серводвигатель авиамодели
При изготовлении моделей серводвигатель часто обозначается аббревиатурой «сервопривод».
Это механический и электронный узел, состоящий из:
- двигатель постоянного тока очень небольшого размера, но способный выполнять задачи в диапазоне от одного до 180 градусов без права на ошибку;
- редуктор на выходе этого двигателя, снижающий скорость, но увеличивающий крутящий момент;
- потенциометр (действующий как резистивный делитель), который генерирует переменное напряжение, пропорциональное углу выходной оси;
- электронное сервоустройство;
- ось, выступающая из корпуса с различными фиксирующими рычагами или колесами.
- внутренний потенциометр, контролирующий малейшие колебания вращения;
Сервоприводы используются для приведения в действие движущихся частей модели: элеронов, закрылков и шестерен для самолетов, управления направлением в случае модельных автомобилей и т. Д. Для этого двигатели управляются и подчиняются внешней команде, обычно передаваемой по радио. .









Операция
Управление шириной импульса: ширина импульса, обычно от 1 до 2 миллисекунд , управляет положением серводвигателя.
Управляющие сигналы генерируются пятиканальным модельным приемником. Кадр здесь повторяется каждые 22 миллисекунды .
Сервомоторы управляются с помощью трехпроводного электрического кабеля, который позволяет питать двигатель и передавать ему инструкции положения в форме сигнала, закодированного в ширину импульса, обычно называемого ШИМ . Это означает, что именно длительность импульсов определяет абсолютный угол выходной оси и, следовательно, положение рычага управления исполнительным механизмом. Сигнал периодически повторяется, обычно каждые 20 миллисекунд , что позволяет электронике постоянно контролировать и корректировать угловое положение выходной оси, последнее измеряется потенциометром.
Когда двигатель работает, ось серводвигателя меняет положение, что изменяет сопротивление потенциометра. Роль электроники состоит в том, чтобы управлять двигателем таким образом, чтобы положение выходного вала соответствовало полученной уставке: это сервоуправление .
Разнообразие
Серводвигатели имеют широкий спектр типов для различных применений.
Самые распространенные и самые дешевые имеют ход, ограниченный 90 ° или 120 °, что менее практично, например, для поворота колеса. Стандартный сервопривод , такие как Futaba S3002 имеет размеры 31,0 × 16,0 × 30,2 мм и весом 35 г . Его скорость вращения составляет 0,20 секунды для поворота на 60 °, а крутящий момент составляет 3,3 кг / см.
Мини-сервопривод, такой как HS-55 от Hitec, в четыре раза легче, но также и менее мощный. Действительно, его крутящий момент составляет 1,1 кг 1.1см, а скорость — 0,17 секунды на 60 °. Но его вес составляет 8 г при габаритах 22,8 × 11,6 × 24 мм .
Еще их различают:
- материал, из которого изготовлены шестерни: нейлон, металл и т.д .;
- возможна установка на подшипники;
- используемая система: аналоговая или цифровая.
Существуют также серводвигатели лебедки, способные делать несколько оборотов, цифровые серводвигатели, управление которыми сильно отличается от описанного выше.
Восстановление калибровочной константы PIC12f629 и PIC12f675
Собрав ниже приведенную схему и установив в панельку исследуемый микроконтроллер PIC12f629 или PIC12f675 можно с точностью до 1% определить КК.
Для калибровки внутреннего генератора микроконтроллера требуется заведомо известная опорная частота. К счастью, для этого мы не должны собирать отдельно стабильный генератор сигнала. Для этого можно воспользоваться переменным напряжением электросети частотой 50 Гц (в некоторых странах частота может быть 60 Гц). Данный сигнал можно снять со вторичной обмотки сетевого трансформатора.
Частота внутреннего генератора в микроконтроллере PIC12F629 и PIC12F675 может незначительно меняется от изменения температуры и напряжения питания. По мере увеличения напряжения питания, частота его немного уменьшается. Когда переключатель SB1 не замкнут, напряжение питания 5 вольт, пройдя через два диода, которые создают падение напряжения около 1,6 вольта, поступает на вывод питания ПИКа (3,4 вольт). С замкнутыми контактами SB1, микроконтроллер работает от 5 вольт. С помощью данной схемы появляется возможность для калибровки либо на 3,4 вольт, либо на 5 вольт питания.
Еще раз:
- SB1 разомкнут — калибровка происходит при 3,4 вольта.
- SB1 замкнут — калибровка происходит при 5 вольт.
Два диода создают падение напряжения, а резистор R1 создает достаточный ток для стабильности напряжения на диодах.
Опорный сигнал подается с вторичной обмотки трансформатора (от 6 до 12 вольт) через диод VD3, резистор R4 и транзистор VT1. Транзистор любой типа NPN.
Внимание. Переменное напряжение на транзистор следует подавать только через трансформатор
Ни в коем случае не напрямую от электросети!
Подпрограмма обработки прерываний
При переполнении регистра таймера происходит переход на вектор прерывания по адресу 0x0004 и запрещаются все прерывания (автоматически сбрасывается бит GIE в регистре INTCON). Подпрограмма обработки прерывания прежде всего должна обеспечивать сохранение содержимого аккумулятора W и регистра STATUS при перед началом обработки прерывания, и восстанавливать значения W и STATUS по окончании обработки. Это необходимо для предотвращения их случайной модификации в подпрограмме обработки прерывания.
Содержимое аккумулятора просто помещается в заранее выделенную ячейку памяти командой «movwf W_TEMP».Регистр STATUS может изменять свое значение при выполнении ряда инструкций, поэтому применяется маленькая хитрость. Содержимое регистра помещается в аккумулятор с перестановкой нибблов (полубайтов) командой «swapf STATUS, W», а оттуда помещается в заранее выделенную ячейку памяти командой «movwf STATUS_TEMP».
Восстановление содержимого W и STATUS в конце подпрограммы происходит в обратном порядке. Содержимое ячейки памяти, хранящей содержимое регистра STATUS помещается в аккумулятор с перестановкой нибблов командой «swapf STATUS_TEMP, W», и из аккумулятора переносится непосредственно в регистр STATUS командой «movwf STATUS».
swapf W_TEMP, F swapf W_TEMP, W
Причина использования команды “swapf” заключается в том, что она не влияет на флаги в регистре STATUS.
Сам обработчик прерывания проверяет что вызвало прерывание (т.к. возможны несколько источников прерывания, если они будут разрешены) путем проверки соответствующих битов регистра INTCON. Поскольку у нас разрешено только одно прерывание, можно было бы не делать такой проверки, но тем не менее проверим бит T0IF (устанавливается при возникновении прерывания от таймера):
btfss INTCON, T0IFgoto ENDISRbcf INTCON, T0IFbsf FLAGS, TF
Если бит не установлен, то произойдет переход к инструкциям восстановления содержимого W и STATUS на метку ENDISR. Если бит установлен то мы его сбросим вручную командой «bcf INTCON, T0IF» и установим флаг задания командой «bsf FLAGS, TF». Далее выполнятся инструкции восстановления содержимого W и STATUS.
Простая схема управления сервоприводом на микроконтроллере PIC12F675
Сервоприводы идеально подходят для приложений, отличных от тех, для которых они предназначены, например, в качестве привода ригеля замка двери.
В таком нестандартном применении сервопривода, сложность составляет в формировании управляющего импульса необходимой продолжительности. Данная схема избавит нас от такой проблемы.
Принципиальная схема контроллера сервопривода показана на следующем рисунке. Схема содержит всего несколько элементов: диод VD1 (1N4007) защищает схему от обратного подключения напряжения питания, стабилизатор DA1 (7805) обеспечивает напряжение 5 В для сервомотора, а через фильтр R4 и C1 подается питание на микроконтроллер DD1 (PIC12F675).
Потенциометры R6 и R7, подключенные к АЦП микроконтроллера, используются в качестве делителя напряжения для установки двух значений напряжения, которые изменяют продолжительность управляющих импульсов сервопривода. Переключатель SA1 предназначен для перевода сервомотора в одно из двух положений.
Работой контроллера сервопривода управляет программа, содержащаяся в памяти микроконтроллера. Таймер микроконтроллера TIMER1 — это 16-разрядный счетчик, который задействован для генерации прерываний каждые 20 мсек, таким образом, устанавливается стандартная частота управляющих импульсов. Прерывание TIMER1 происходит, когда счетчик переполняется.
Как известно, положение сервопривода определяется длиной импульса. Длительность каждого импульса определяется с помощью TIMER0. Его запуск синхронизируется с прерыванием от TIMER1. Переполнение TIMER0 генерирует второе прерывание, которое завершает импульс и останавливает счетчик.
Время переполнения TIMER0 и, следовательно, длительность импульса определяется начальным значением счетчика, которое пропорционально результату преобразования АЦП. Таким образом, изменение напряжения в диапазоне 0…5 В на входе АЦП приводит к изменению длительности импульса в диапазоне 0,5…2,5 мсек.
Кроме того, состояние SA1 определяет, какой потенциометр (R6 или R7) будет определять напряжение на входе АЦП. Благодаря этому сервопривод может управляться либо через SA1, либо в полном объеме путем изменения положения потенциометров.
Устройство собрано на печатной плате, схема монтажа которой показана ниже
Следует обратить внимание на то, что R1…R5 — SMD резисторы, которые установлены на другой стороне платы
Электрический паяльник + фен для SMD, двойной цифровой дисплей…

Ремонт утюга своими руками
У каждого в доме был и есть… утюг. Это один из необходимых инструментов нашей жизни. Раньше утюги работали без электричества и никогда не ломались. Сегодня всё по другому: утюги лёгкие, удобные, быстро нагреваются, но и бывают поломки.







Сегодня на примере данного утюга подробно рассмотрим одну из поломок и способа её устранения.
Чтобы отремонтировать утюг, конечно, его надо разобрать. Для этого нам понадобятся: небольшая плоская, крестовая и трёхгранная отвертки. Для разборки некоторых утюгов бывает ещё нужна отвёртка плоская с усиками для специальных шурупов.
Шаг 1. Снимаем заднюю стенку с помощью трёхгранной отвертки.

Шаг 2. Откручиваем шурупы, отмеченные красными стрелками.
Шаг 3. Снимаем кнопки выброса пара, поддевая по бокам защёлки тонкой отверткой.
Шаг 4. Откручиваем шурупы, отмеченные красными стрелками.
Шаг 5. Снимаем плату, откручивая шурупы, отмеченные красными стрелками.
Шаг 7. Снимаем водяной контейнер и насосы для подачи пара. Аккуратно снимаем трубочки.
Не растеряйте керамические втулки, через которые крепится подошва.
Шаг 9. Снимаем контакты в сборе, откручивая шурупы, отмеченные красными стрелками.
Мнение эксперта
It-Technology, Cпециалист по электроэнергетике и электронике
Задавайте вопросы «Специалисту по модернизации систем энергогенерации»
Утюг Филипс: схема прибора и ремонт своими руками, замена термопредохранителей и других устройств, советы Конструкции приборов от разных производителей несколько отличаются друг от друга, поэтому процесс разборки у них также бывает разным. Спрашивайте, я на связи!
Сервопривод Delta ASDA-B2
Серия ASDA-B2 включает сервопреобразователи и серводвигатели мощностью от 0.1 до 3 кВт. Эта бюджетная серия имеет набор стандартных функций и характеристик, необходимых для задач общего применения. Она не перегружена различными мехатронными функциями, которые увеличивают стоимость сервосистем и усложняют ввод в эксплуатацию. Сервоприводы ASDA-B2 обладают высокой производительностью, точностью и отличными динамическими характеристиками. Они просты в настройке и могут быть легко интегрированы в новые, а также в существующие системы в качестве замены сервоприводов других брендов. Используя сервоприводы ASDA-B2, вы не можете сделать свои решения более рентабельными за счёт оптимальных технико-экономических характеристик.
Управление 6 светодиодами от 3 выводов
Высокий выходной ток (до 20 мА) портов ввода-вывода микроконтроллеров PIC12Fxxx позволяет подключать светодиоды без применения дополнительных драйверов. Управление свечением отдельных светодиодов или их комбинаций может быть осуществлено с помощью установки вывода микроконтроллера в «1 », «0 » или переключение его на вход. Число диодов (D), которое может управляться независимо, определяется числом используемых выводов микроконтроллера (GP) и рассчитывается по следующей формуле:
Таблица 1. Соответствие состояния портов контроллера и включения светодиодов
| GP0 | 1 | Z | Z | 1 | 1 | 1 | 1 | 1 | |||||
| GP1 | 1 | 1 | Z | Z | 1 | 1 | 1 | 1 | |||||
| GP2 | Z | Z | 1 | 1 | 1 | 1 | 1 | 1 | |||||
| VD1 | Д | Д | Д | ||||||||||
| VD2 | Д | Д | Д | ||||||||||
| VD3 | Д | Д | Д | ||||||||||
| VD4 | Д | Д | Д | ||||||||||
| VD5 | Д | Д | Д | ||||||||||
| VD6 | Д | Д | Д |

Определение 3 состояний одного входа
Вход микроконтроллера может иметь три состояния: подключен к «1 », к «0 » или не подключен. Конденсатор заряжается или разряжается в зависимости от состояния выходного порта GP и позволяет определить все три состояния. Вход микроконтроллера находится в третьем состоянии, если при выставлении уровня лог. «1 » на порт GP с этого порта считывается «1 » и при выставлении лог. «0 » считывается «0 ».
