
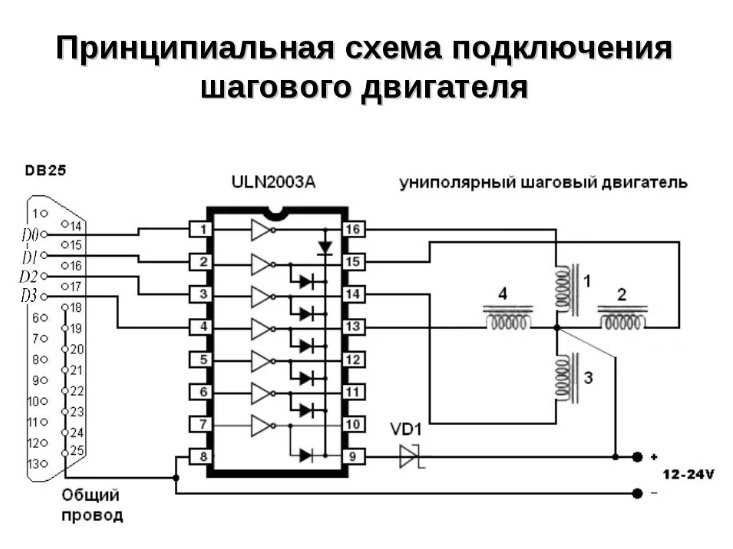
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ
Как подключить шаговый двигатель с 4, 5, 6 и 8 контактами к драйверу?

В предыдущих статьях мы обсуждали процесс выбора шагового двигателя (см. статью «Как выбрать шаговый двигатель»).
«Как выбрать шаговый двигатель») в зависимости от области применения.
) в зависимости от применения. В этой статье мы подробно рассмотрим подключение шагового двигателя.
Шаговые двигатели могут поставляться с различными вариантами подключения. Выбор схемы зависит от типа двигателя. Большинство распространенных шаговых двигателей имеют цепи с 4, 5, 6 или 8 проводами.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если у вас есть шаговый двигатель, к которому подключены только четыре провода, это означает, что он имеет две обмотки, является биполярным двигателем и его можно использовать только с биполярным драйвером
Обратите внимание, что каждая фазная обмотка содержит пару проводов — используйте тестер (мультиметр) для идентификации каждого провода
Найдите закороченные провода (те, которые проверяются) и подключите их к шаговому двигателю. Лучше всего подключить их все сразу, чтобы не повторять процесс снова и снова.
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Как и шаговый двигатель с четырехполюсным подключением, униполярный 6-проводной двигатель имеет одну пару проводов для каждой обмотки. Однако он также имеет центральный провод для каждой обмотки, так что его можно использовать
как биполярный шаговый двигатель
а также униполярный шаговый двигатель.
Для подключения шагового двигателя с 6 проводами используйте тестер, чтобы разделить все провода на три группы, которые замыкаются вместе, а затем найдите средний провод, измерив сопротивление между проводами. Если вы хотите подключить двигатель к однополюсному драйверу, используйте все шесть проводов.
Для подключения к биполярному драйверу (а это подавляющее большинство) достаточно использовать один конец одножильного кабеля и центральный провод для подключения к каждой обмотке.
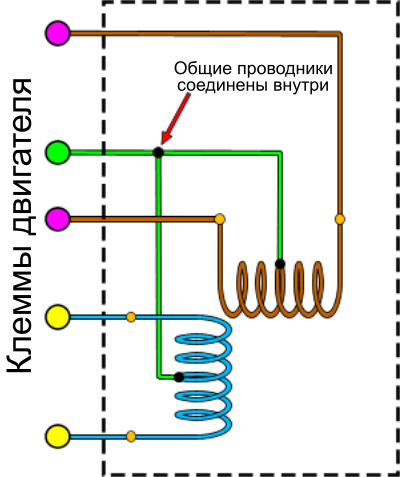
Схема подключения 5-контактного шагового двигателя очень похожа на схему подключения 6-контактного. Основное отличие заключается в том, что центральные провода соединяются внутри в один кабель. Это гарантирует, что двигатель работает только в однополярной цепи.
Кроме того, обмотки можно определить только методом проб и ошибок; лучше всего попытаться найти средний провод, так как его сопротивление в два раза меньше, чем у других проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 8 ВЫВОДАМИ
Наконец, существуют шаговые двигатели, которые соединены 8 проводами. Чтобы понять, как подключить шаговый двигатель с 8 проводами, нужно обратиться к инструкциям выше; их схема почти такая же, как и схема с 6 проводами. Разница между ними заключается в том, что две фазы разделены на две отдельные обмотки. С помощью приведенной выше схемы вы можете подключить шаговый двигатель в однофазную цепь, а также иметь три различные комбинации для двухполярного подключения.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
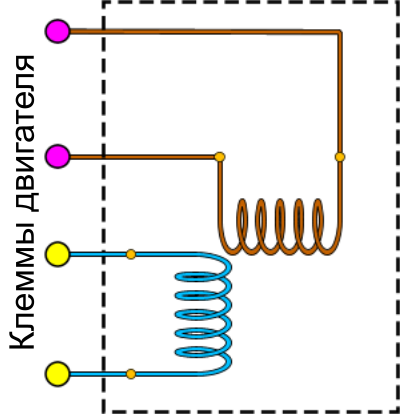
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
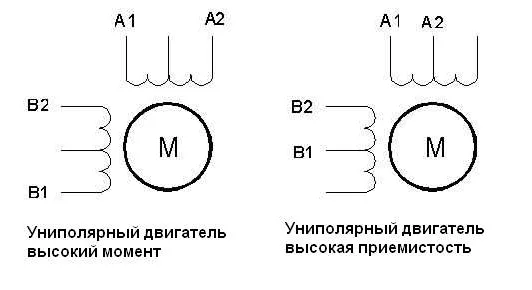
Униполярный двигатель
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
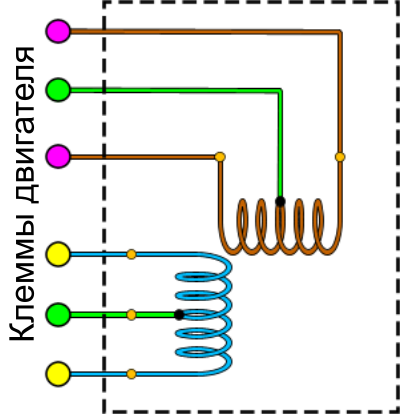
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Подключение шагового двигателя
Для подачи потенциала на обмотки ШД необходим механизм, способный выдать один или группу импульсов в конкретной последовательности. В роли таких элементов выступают полупроводниковые устройства и драйвера на базе микропроцессоров.

В них предусмотрена группа выходных клемм, каждая из которых формирует режим функционирования и подачи напряжения.
С учетом схемы подключения используются те или иные выводы устройства. Как результат, удается подобрать конкретную скорость вращения, шаг или микрошаг для перемещения в плоскости.
Всего выделяется шесть основных схем соединения:
- биполярный;
- биполярный с отводом из центральной части обмотки;
- униполярный с четырьмя фазами и подключением пары обмоток;
- четырехфазный униполярный с параллельным подключением;
- четырехфазный униполярный с последовательным соединением.
Если питание шагового двигателя осуществляется от одинакового драйвера, в отношении упомянутых выше схем можно выделять ряд особенностей:
- Отводы всегда подходят к соответствующим клеммам. При последовательном объединении обмоток повышается индуктивность обмоток и снижается ток.
- Пользователь получает паспортные параметры касательно параметров. При параллельном подключении повышается ток и уменьшается индуктивность. Если подключить обмотку по одной фазе, уменьшается момент на низких оборотах, и снижается величина тока.
- Сохраняются динамические и электрические параметры (с учетом данных в паспорте).
- Повышенный момент и использование для получения больших частот.
- Увеличение момента (используется для небольших частот вращения).
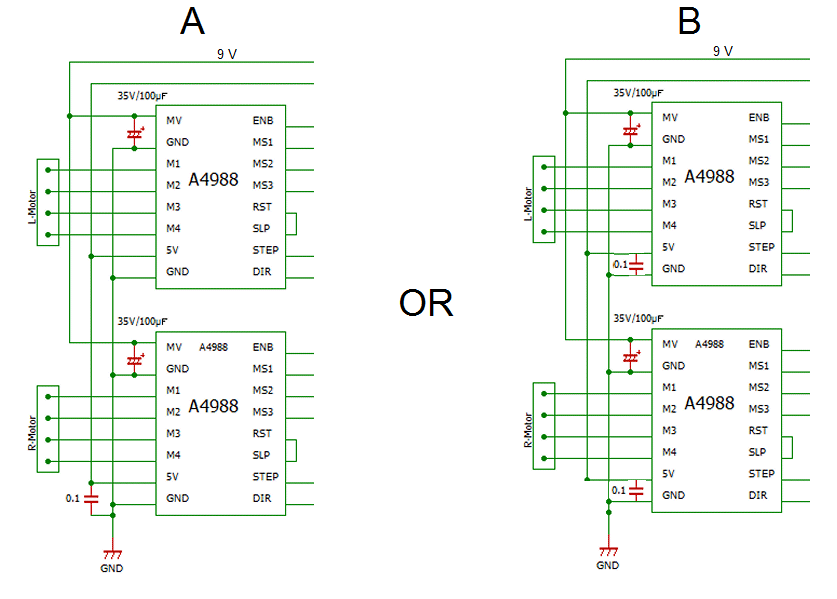
Принципиальные схемы подключения показаны ниже.


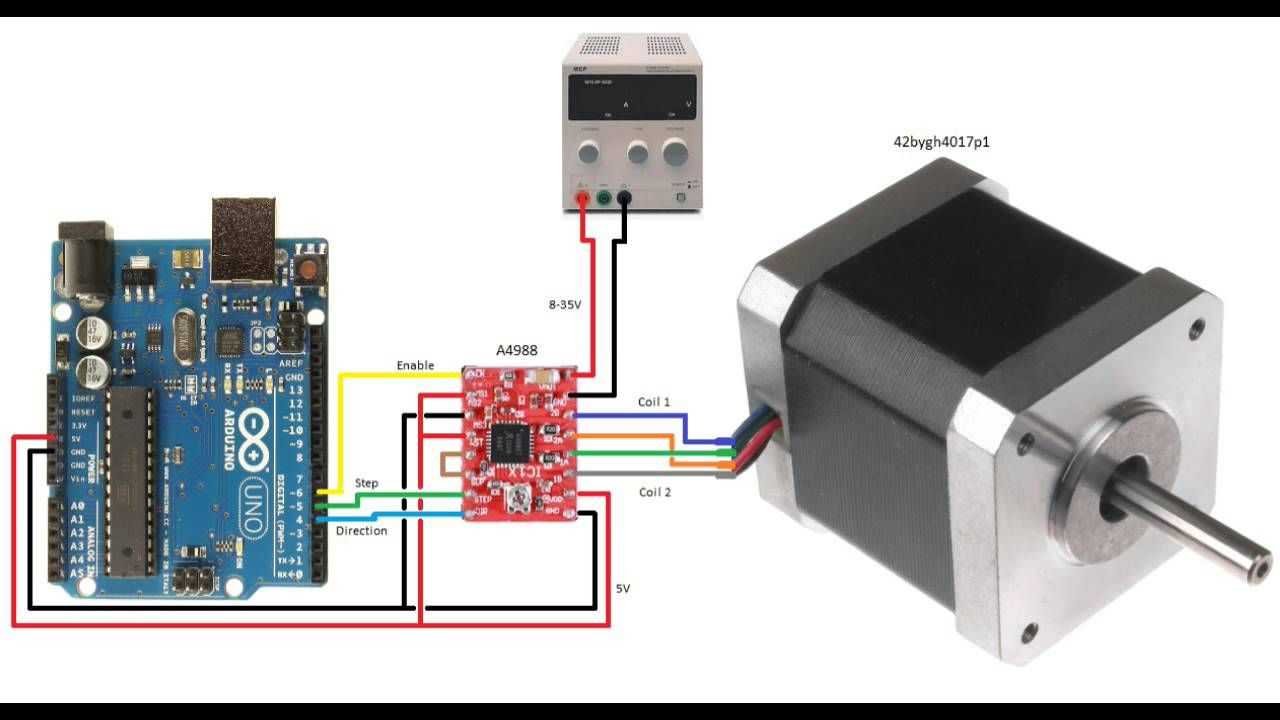
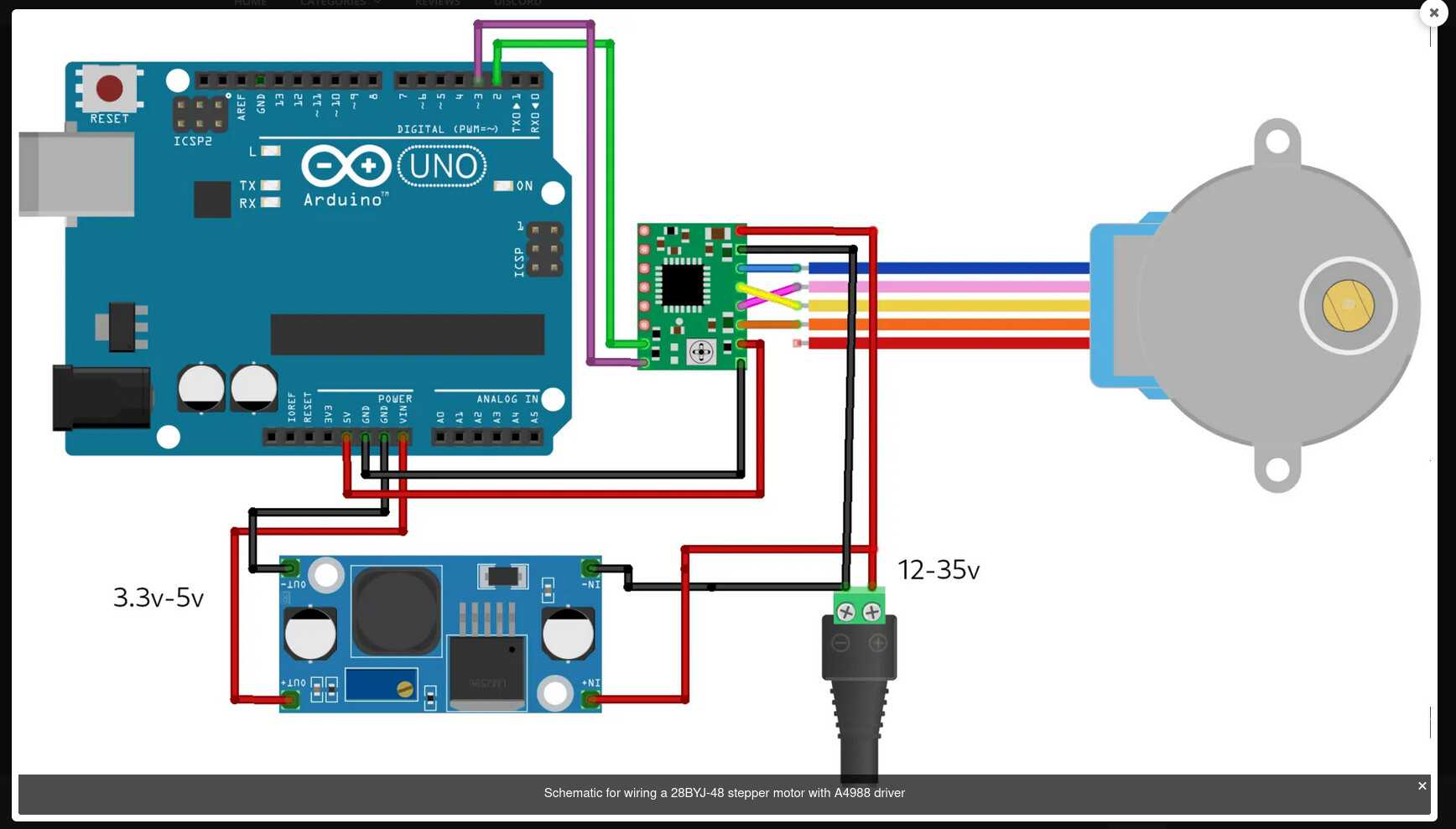
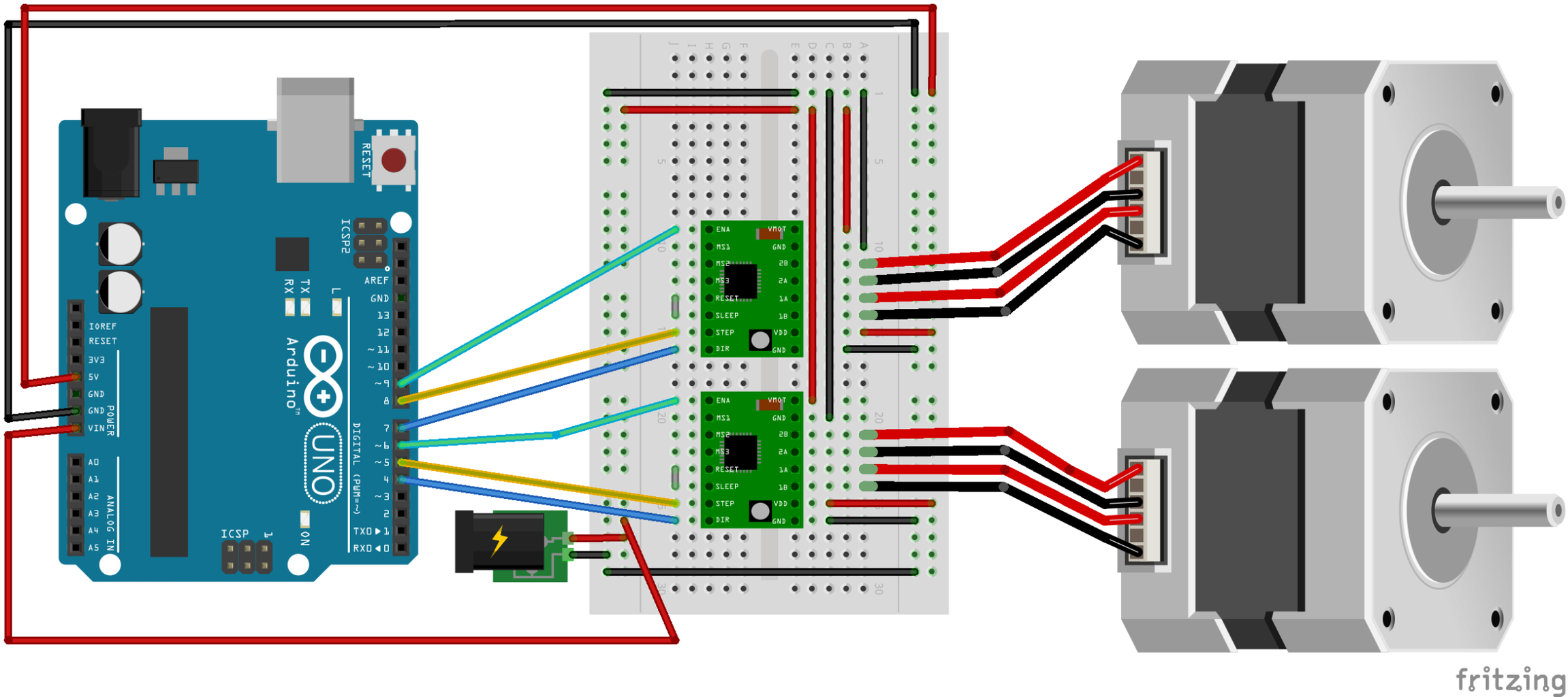
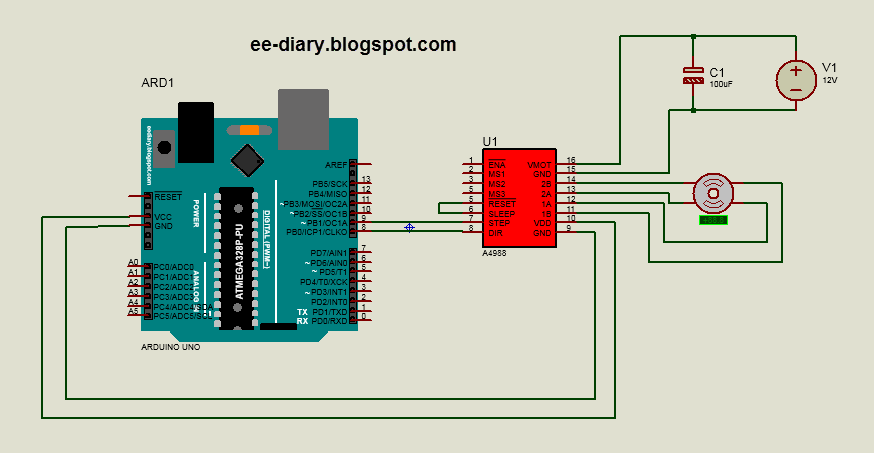
Для беспроблемной эксплуатации ШД важно помнить о тонкостях подачи номинального напряжения, скорости момента вращения и снижения линейного напряжения. Отдельного внимания заслуживает подключение шагового двигателя к Ардуино. В этом случае управляющие выходы с драйвера подключены цифровым контактам на Arduino Uno
В этом случае управляющие выходы с драйвера подключены цифровым контактам на Arduino Uno
Отдельного внимания заслуживает подключение шагового двигателя к Ардуино. В этом случае управляющие выходы с драйвера подключены цифровым контактам на Arduino Uno.

Питающее напряжение равно 5 В. Дополнительно можно использовать еще один источник питания во избежание перегрева платы.
Кстати, как сделать умный дом на Arduino читайте тут https://elektrikexpert.ru/arduino.html.
ДОКУМЕНТАЦИЯ
Документация
Инициализация
Библиотека поддерживает три типа драйверов:
- DRIVER2WIRE – двухпроводной драйвер (направление + ШИМ)
- DRIVER2WIRE_NO_INVERT – двухпроводной драйвер, в котором при смене направления не нужна инверсия ШИМ
- DRIVER3WIRE – трёхпроводной драйвер (два пина направления + ШИМ)
- RELAY2WIRE – реле в качестве драйвера (два пина направления)
Инициализация происходит следующим образом:
- GMotor motor(DRIVER2WIRE, dig_pin, PWM_pin, level);
- GMotor motor(DRIVER3WIRE, dig_pin_A, dig_pin_B, PWM_pin, level);
- GMotor motor(RELAY2WIRE, dig_pin_A, dig_pin_B, level);
- dig_pin , dig_pin_A , dig_pin_B – любой цифровой пин МК
- PWM_pin – любой ШИМ пин МК
- level – LOW / HIGH – уровень драйвера. Если при увеличении скорости мотор наоборот тормозит – смени уровень
Настройки
- setDeadtime(us) – установка программного deadtime на переключение направления, us в микросекундах. По умолчанию стоит 0: deadtime отключен
- setDirection(dir) – ГЛОБАЛЬНАЯ смена направления вращения мотора например чтобы FORWARD совпадал с направлением движения “вперёд” у машинки. dir – REVERSE или NORMAL (умолч.)
- setLevel(level) – смена уровня драйвера (аналогично при инициализации). Если при увеличении скорости мотор наоборот тормозит – смени уровень. level – LOW или HIGH
- setMinDuty(duty) – минимальный сигнал (по модулю), который будет подан на мотор. Автоматически сжимает диапазон регулирования мотора: например minDuty поставили 50, и при сигнале 1 будет на мотор будет подано
51, максимум останется прежним (диапазон сигнала переведётся в 50.. 255 внутри библиотеки).
Режим работы
У мотора есть 5 режимов работы, устанавливаются при помощи setMode(mode) , где mode:
- FORWARD – вперёд
- BACKWARD – назад
- STOP – холостой (мотор отключен)
- AUTO – отдать управление функции setSpeed()
Управление скоростью и направлением
Скорость устанавливается при помощи функции setSpeed(speed) . Есть два варианта управления скоростью:
- Направление в ручном режиме, скорость 0..255 (0..1023). В этом случае скорость должна быть положительной ( setSpeed(0..255) ), направление вращения задаётся при помощи setMode() . При направлении FORWARD частота оборотов растёт по мере увеличения setSpeed(speed) , при направлении BACKWARD частота оборотов растёт в противоположную сторону по мере увеличения setSpeed(speed) .
- Направление в автоматическом режиме, скорость -255..255 (-1023..1023 для 10 бит). В этом случае устанавливаем setMode(AUTO) и подаём скорость во всём диапазоне. При значении мотор -255 крутится с максимальной скоростью в направлении “назад”, при 255 – в направлении “вперёд”. При значении 0 (ноль) режим автоматически переключается на STOP. Если задан параметр minDuty (при помощи setMinDuty() ), то режим STOP будет автоматически активирован при значении скорости в пределах (-minDuty, minDuty). Пример: у нас есть мотор, экспериментально установлено, что он начинает вращаться при величине скорости больше 50 (и, соответственно, меньше -50), при меньшем значении он просто “пищит” и стоит на месте. Если мы выставим setMinDuty(50) , то в диапазоне -50..50 мотор автоматически будет находиться в режиме STOP и не будет пищать при “шуме” задающего сигнала.
Разрешение ШИМ
setSpeed(speed) может работать с ШИМ любого разрешения, для этого нужно
- Перевести таймер в режим нужного разрешения. 8 битные таймеры можно запустить только на пониженном разрешении, а 16 битный – например на 10 битах (выводы D9 и D10), смотрите пример в библиотеке и урок по частоте ШИМ. По Arduino MEGA пока что такого готового набора у меня нет.
- Настроить нужный объект класса GMotor на нужное разрешение при помощи setResolution(bit) , где bit – разрешение ШИМ в битах (по умолчанию 8). Также не забыть подключить пин драйвера ШИМ к выводу настроенного в первом пункте таймера (смотри пример).
Несколько моторов могут работать на одной плате с разным разрешением, т.е. например 2 мотора на таймере 1 с разрешением 10 бит, и ещё два на таймере 2 с разрешением 8 бит.
Плавное управление скоростью
В библиотеке реализован готовый инструмент для плавного изменения скорости, что может обеспечить плавный пуск и остановку механизмов:
- setSmoothSpeed(acc) – установка скорости изменения скорости (т.е. ускорения) мотора
- smoothTick(speed) – данная функция сама меняет скорость мотора, плавно приближая её к указанной speed . Функция работает по встроенному таймеру на millis() с периодом 50 мс, то есть рекомендуется вызывать smoothTick(speed) не реже, чем каждые 50 мс.
В примере smooth_control можно открыть плоттер и посмотреть, как работает алгоритм.
Направляющие (валы)

На что влияет. Плавность хода сопла, ровность слоев.
Варианты. Направляющих для Prusa i3 нужно ровно шесть штук. По две на каждую ось (X, Y, Z). Размеры следующие:
Общепринятый стандарт для валов 3D-принтера — 8 мм. И гнаться за 10 или 12 мм смысла нет. Вес головы хотэнда не такой значительный, что бы на расстоянии в 370 мм гнуть вал.
Хотя, если у вас есть лишние деньги, можно извратиться и купить 12 миллиметровые валы. Вот только подшипники и подгонка пластиковых деталей потом выйдет дороговато.

Финансовый совет. Перфекционистам на заметку: рельсовые направляющие, конечно же, отличная штука. Но их стоимость даже в Китае откровенно пугает. Оставьте эту модернизацию на будущее.
К слову, валы можно купить как на AliExpress (тут или тут), так и по месту с тех же досок объявлений. Самый доступный вариант — отправиться на блошиный рынок и найти на разборке принтеров и старой оргтехники (МФУ, сканеры) шесть нормальных валов.
Главное, вооружитесь штангенциркулем. Все валы должны быть строго одного диаметра. Цена за штуку получится в районе 60 – 70 рублей.

Цена вопроса: 420 рублей (вариант блошинного рынка).
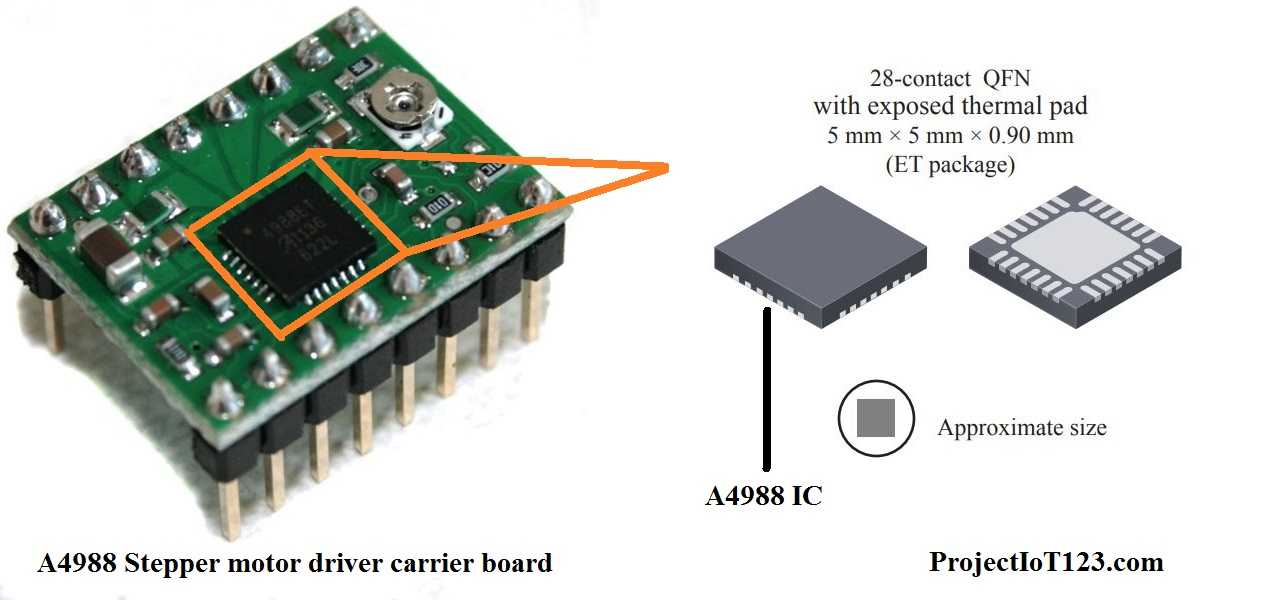
Драйвер шагового двигателя
Краткое введение в теорию и типы драйверов, советы по подбору оптимального драйвера для шагового двигателя.
Некоторые сведения, которые могут помочь вам выбрать драйвер шагового двигателя.
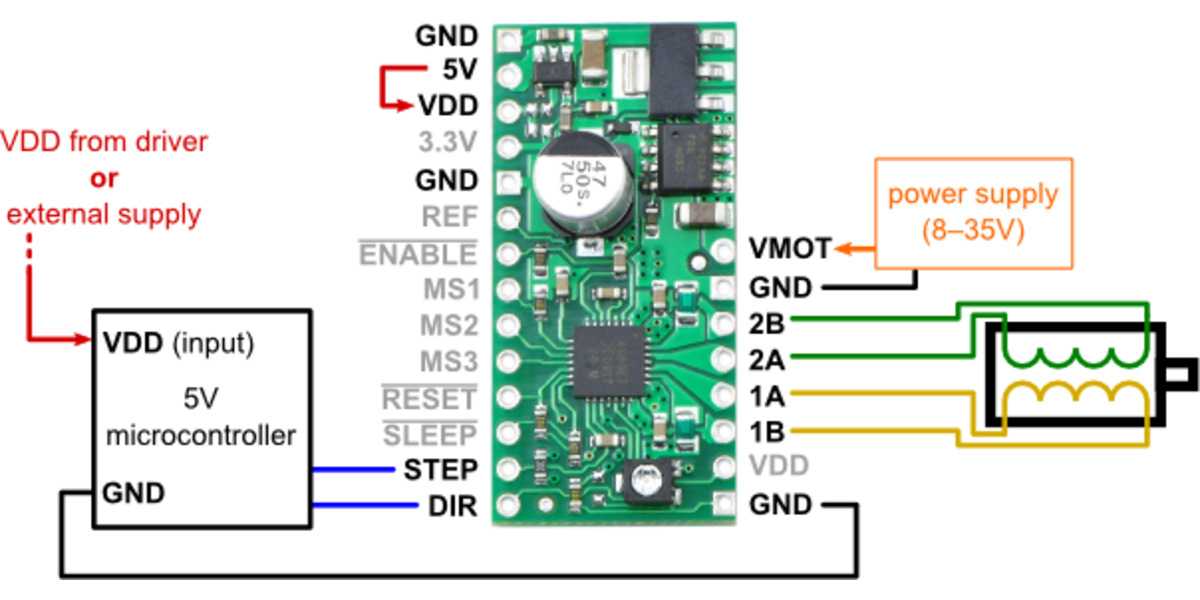
Шаговый двигатель – двигатель со сложной схемой управления, которому требуется специальное электронное устройство – драйвер шагового двигателя.
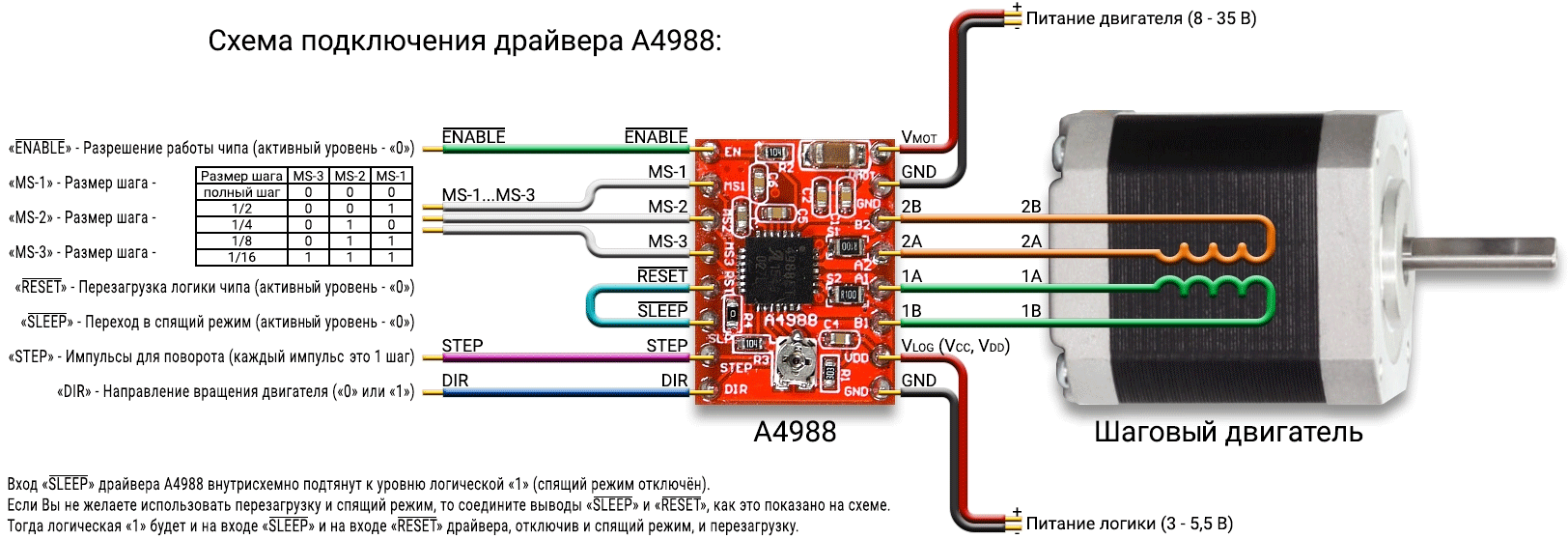
Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. >Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach3 или LinuxCNC.
Задача драйвера – изменять ток в обмотках как можно более эффективно, а поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Типы (виды) драйверов ШД
Драйверы делятся по способу закачки тока в обмотки на несколько видов:1) Драйверы постоянного напряжения
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях.
2) Двухуровневые драйверы
В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
3) Драйверы с ШИМ.
На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т.п.
Корпус

На что влияет. Корпус обеспечивает жесткость всей конструкции. Учтите, что во время печати хотэнд будет постоянно перемешаться вверх, вниз, влево, вправо, вперед и назад. Иногда эти движения будут очень резкими и быстрыми, поэтому, чем надежнее будет корпус, тем лучших результатов вы достигните.
Варианты. Чертеж рамы есть в открытом доступе (тут или тут). Дальше остается обратиться в конторы, занимающиеся резкой фанеры, ДСП, акрила или металла.
Из стали 3-4 миллиметра выйдет подороже, потяжелее, но надежнее. Из фанеры 6 – 8 мм дешевле. Есть варианты и из акрила.
Финансовый совет. Готовые варианты рам на AliExpress и Ebay сразу отметайте. Там просят в три-четыре раза большую сумму. Полистайте доски объявлений по месту жительства. Средняя стоимость корпуса из фанеры варьируется в пределах 600 – 1000 рублей. Все, что дороже — от лукавого.
Цена вопроса: 800 рублей (здесь и далее – приблизительная стоимость).
Настройка тока DRV8825.
Перед использованием мотора нужно сделать небольшую настройку, необходимо ограничить максимальную величину тока, протекающего через катушки шагового двигателя, и ограничить его превышение номинального тока двигателя, регулировка осуществляется с помощью небольшого потенциометра.
Для настройки необходимо рассчитать значение напряжения Vref.
Vref = Current Limit / 2
где,
Current Limit — номинальный ток двигателя.
Для примера рассмотрим двигатель NEMA 17 17HS4401 с током 1,7 А.
Vref = 1,7 / 2 = 0,85 В.
Осталось только настроить, берем отвертку и вольтметр, плюсовый щуп вольтметра устанавливаем на потенциометр, а щуп заземления на вывод GND и выставляем нужное значение.
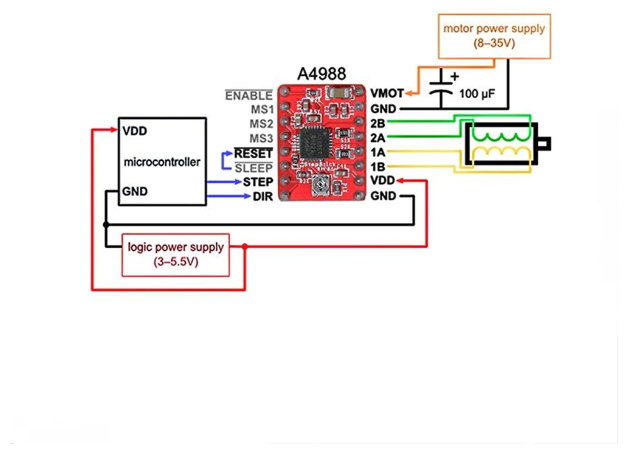
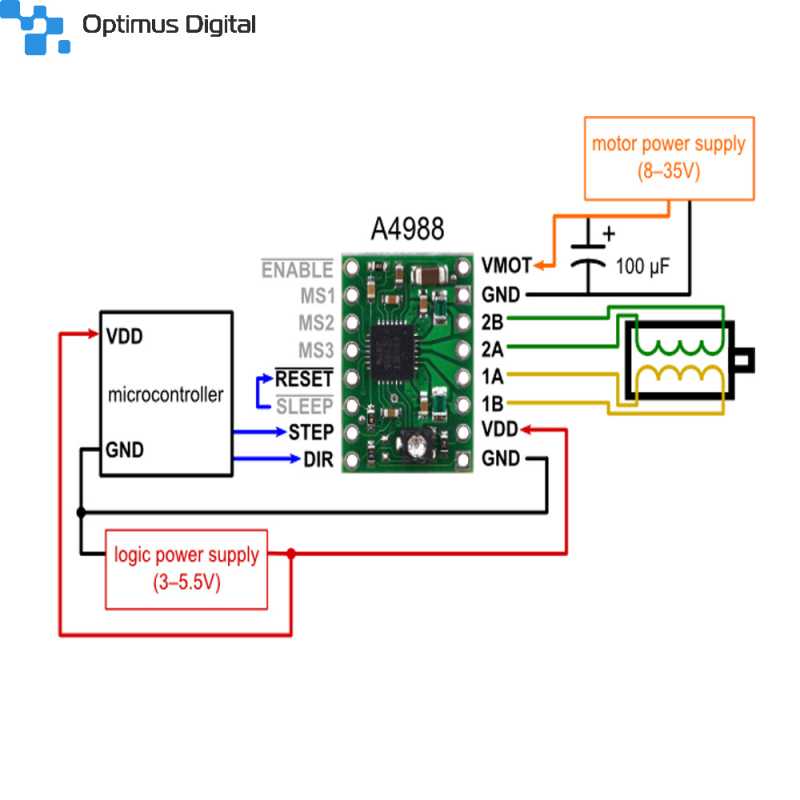
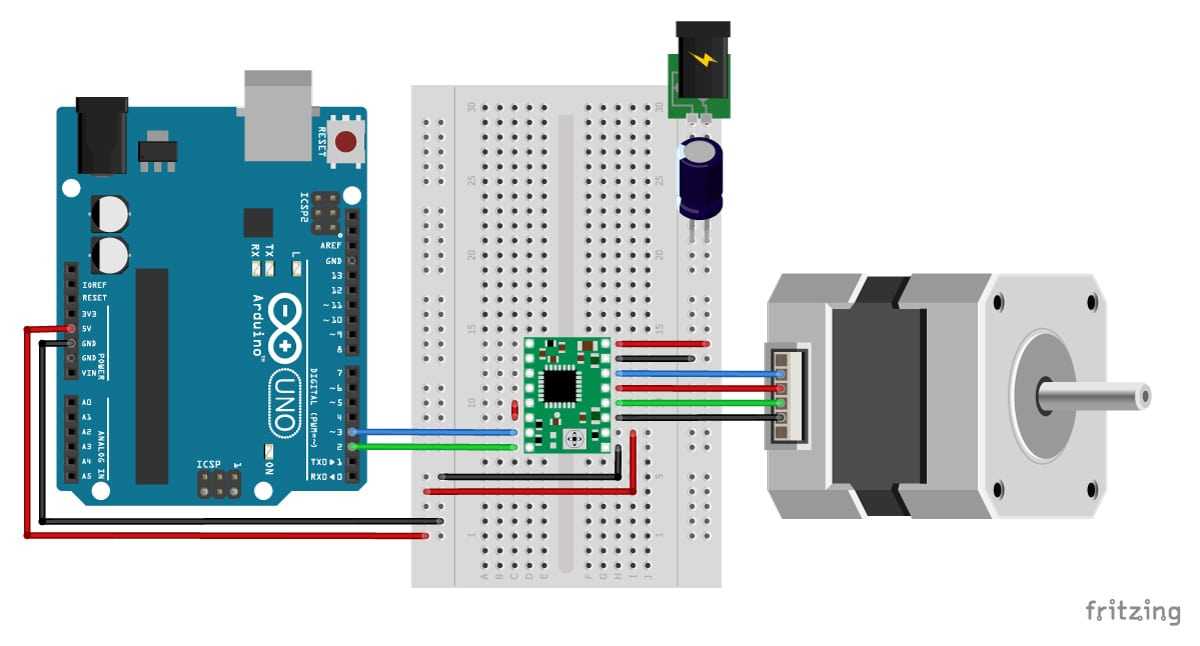
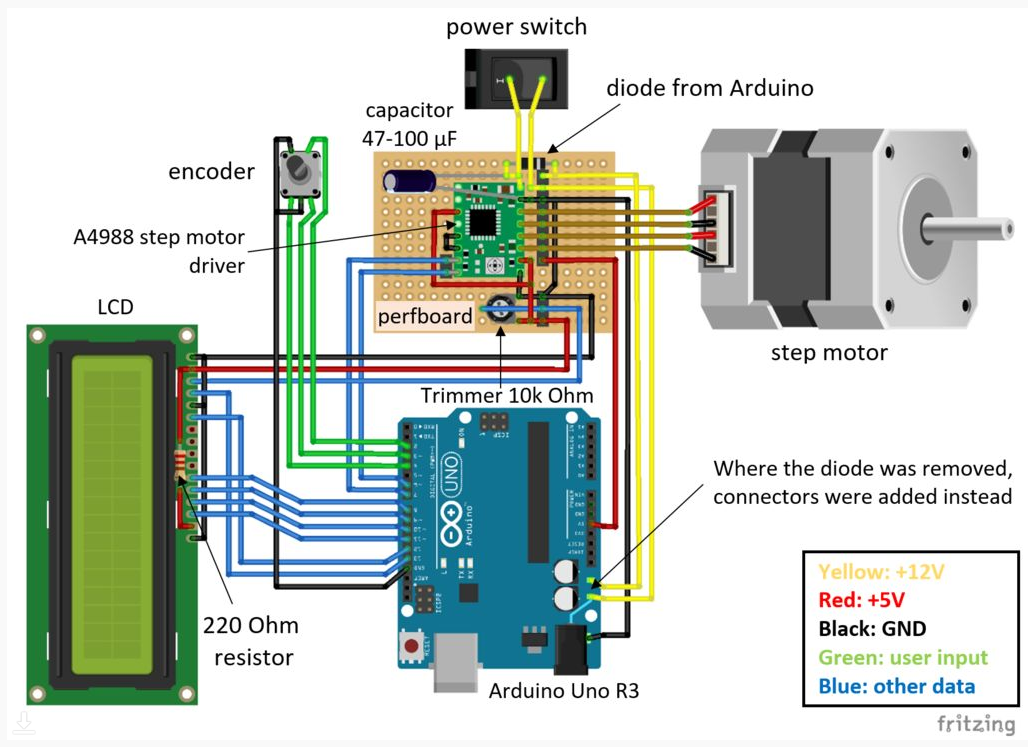
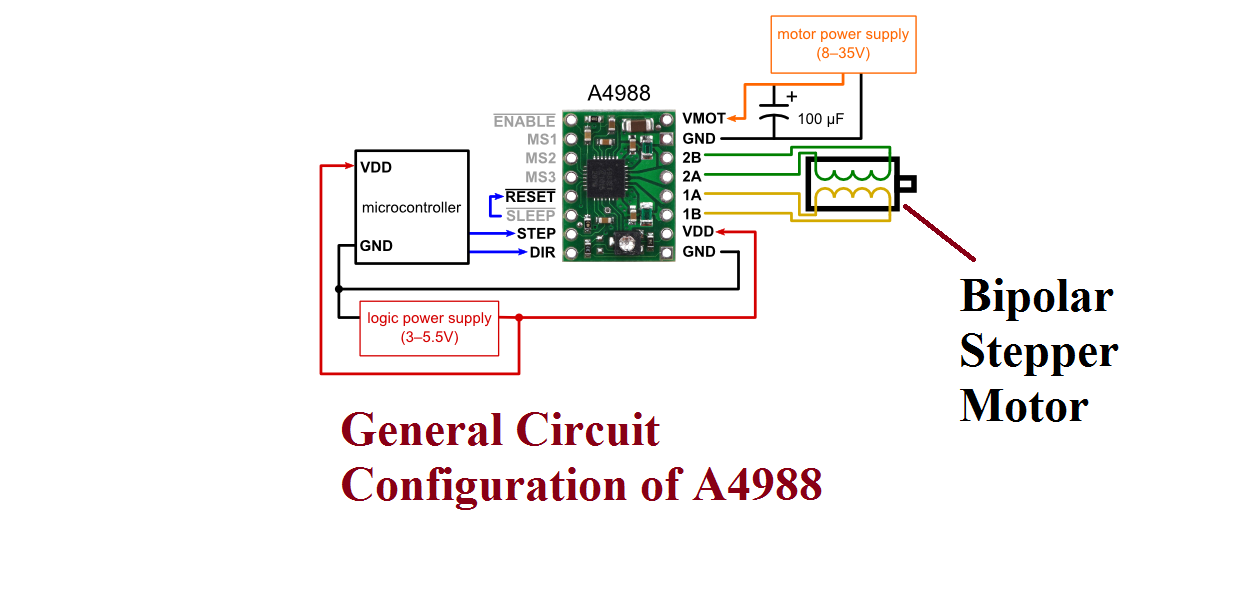
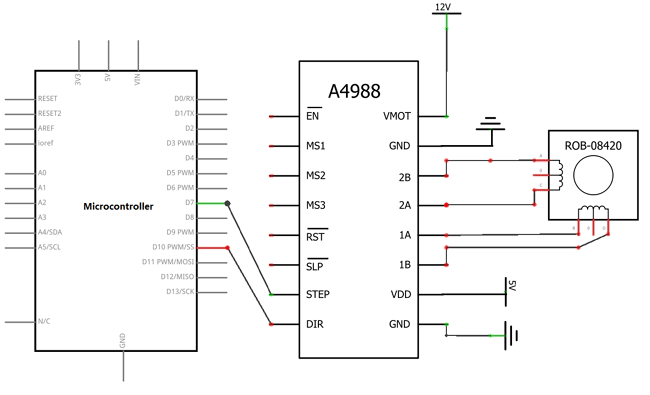
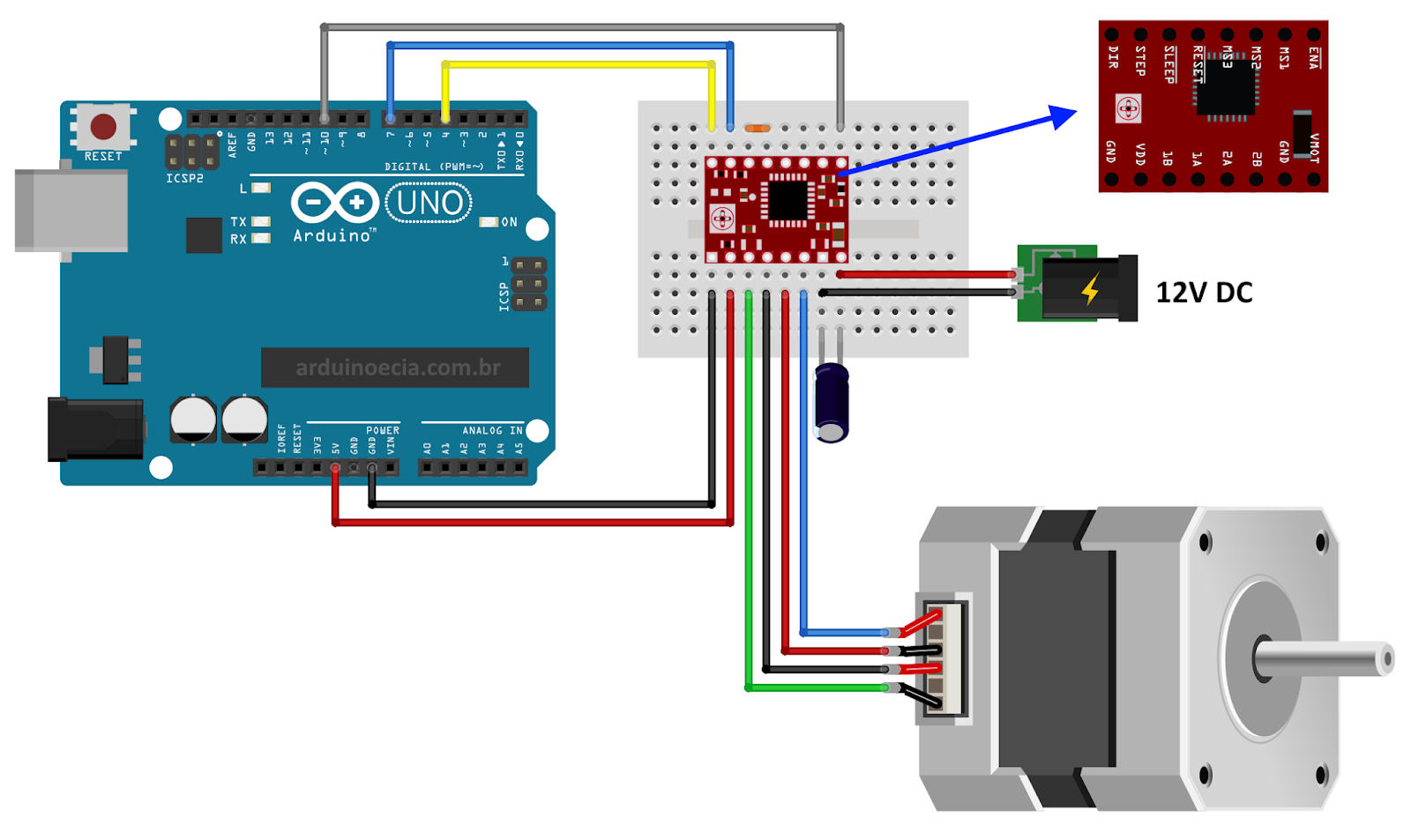
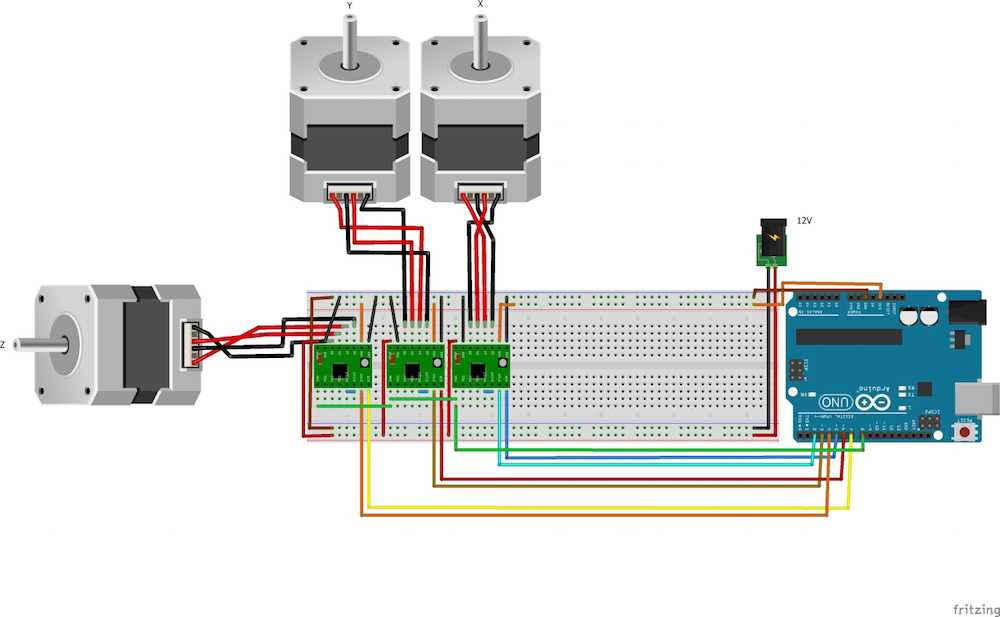
Подключение драйвера шагового двигателя DRV8825 к Arduino UNO.
Подключим двигатель DRV8825 к Arduino UNO по схеме.
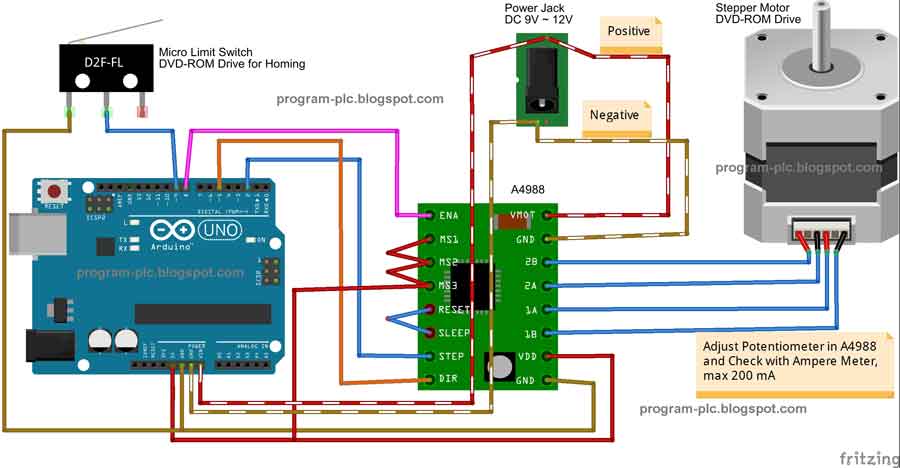
Для этого подключаем GND LOGIC к GND на Arduino. Контакты DIR и STEP подключим к цифровым контактам 2 и 3 на Arduino. Подключение шагового двигателя к контактам B2, B1, A2 и A1.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению.
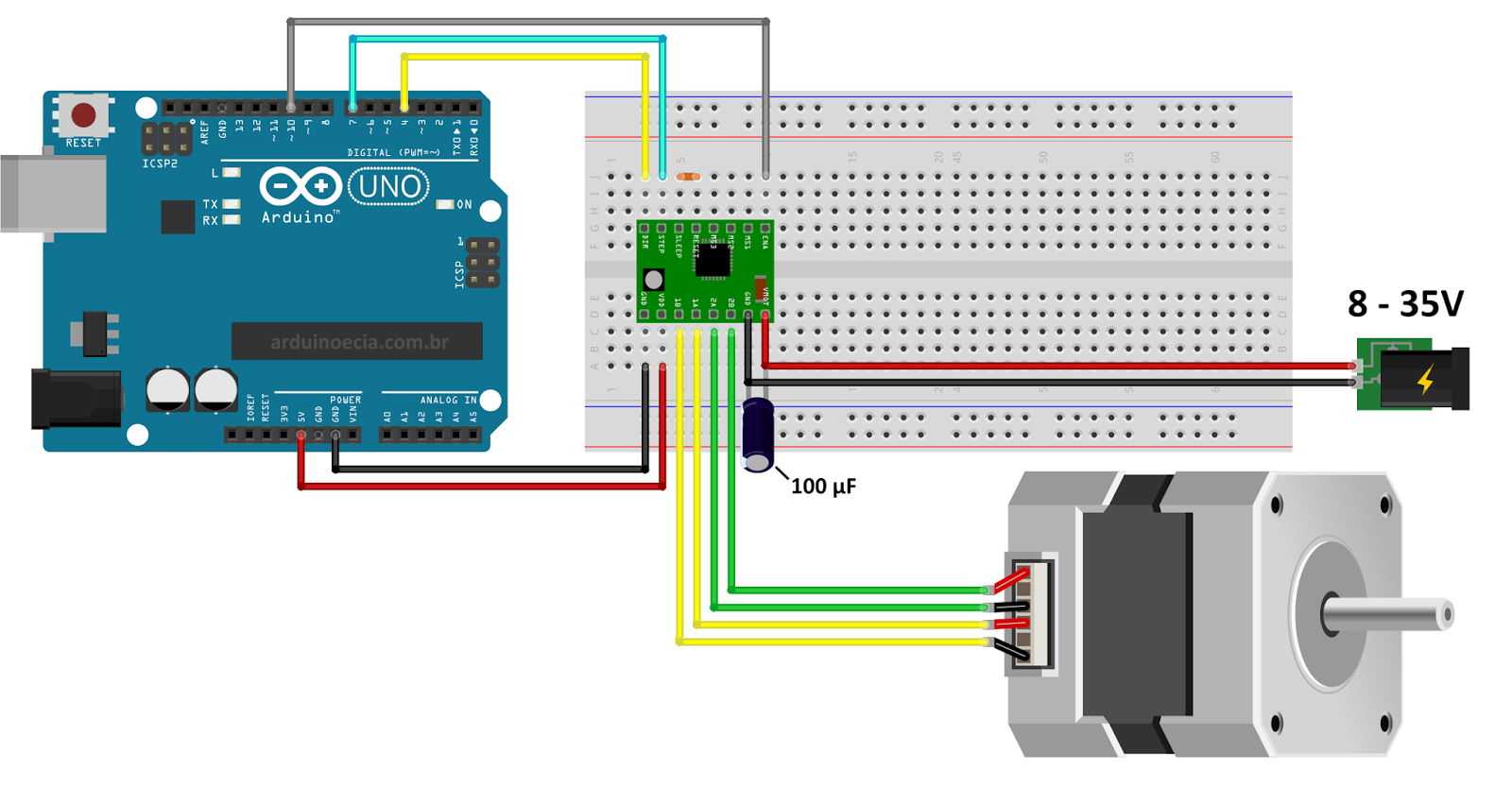
Затем необходимо подключить контакт RST к соседнему контакту SLP к 5В на Arduino, чтобы включить драйвер. А контакты выбора микрошага необходимо оставить не подключенными, чтобы работал режим полный микрошаг. Теперь осталось подключить питание двигателя к контактам VMOT и GND MOT, главное не забудьте подключить электролитический конденсатор на 100 мкФ к контактам питания двигателя. В противном случае, при скачке напряжения модуль может выйти из строя.
Скетч вращения шагового двигателя NEMA 17, драйвер DRV8825.
Как уже было упомянуто выше, драйвер DRV8825 заменим драйвером A4988, поэтому и код вращения двигателем можно взять из предыдущей статьи: Драйвер шагового двигателя A4988. Но для увеличения кругозора сегодня будем использовать код вращения двигателя nema 17 без использования библиотеки.
const int dirPin = 2;
const int stepPin = 3;
const int stepsPerRevolution = 200;
void setup()
{
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
}
void loop()
{
digitalWrite(dirPin, HIGH); // Установка вращения по часовой стрелки
for(int x = 0; x > stepsPerRevolution; x++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite(stepPin, LOW);
delayMicroseconds(2000);
}
delay(1000);
digitalWrite(dirPin, LOW); // Установка вращения против часовой стрелки
for(int x = 0; x < stepsPerRevolution; x++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(1000);
digitalWrite(stepPin, LOW);
delayMicroseconds(1000);
}
delay(1000);
}
Описание скетча:
Для работы данного скетча, не требуется никаких библиотек. Программа начинается с определения выводов Arduino, к которым подключены выводы STEP и DIR. Так же указываем stepsPerRevolution количество шагов на оборот.
В функции void setup() указываем управляющие контакты как выход.
В основной функции void loop(), вращаем двигатель по часовой стрелке, затем против, с разной скоростью.
Подробнее о подключении шаговых двигателей к Ardiono смотрите на сайте Ардуино технологии.
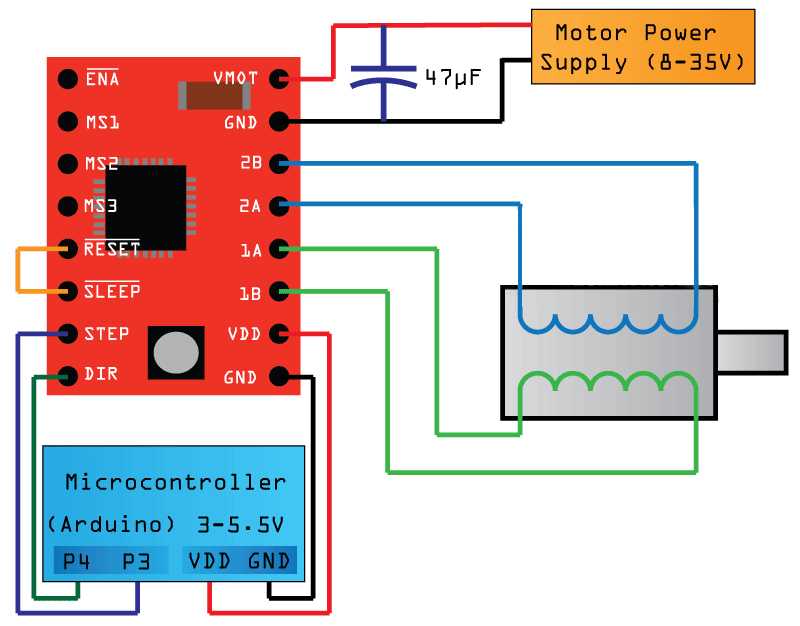
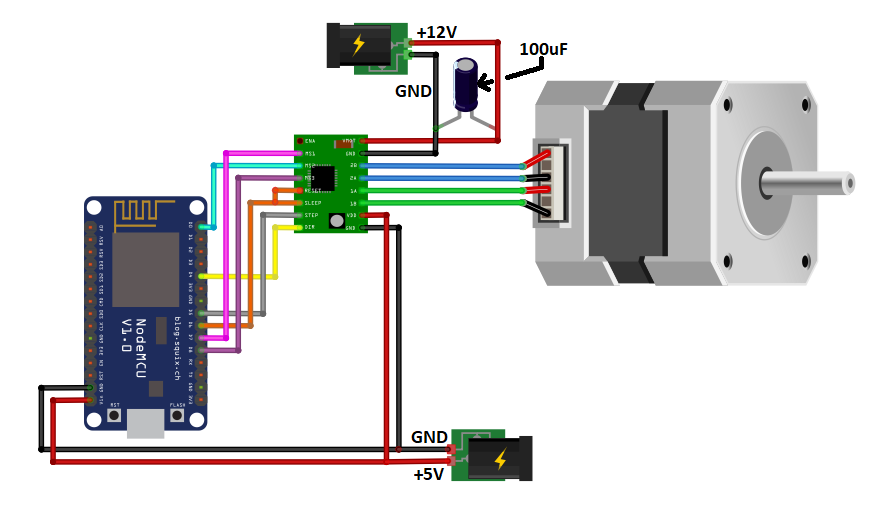
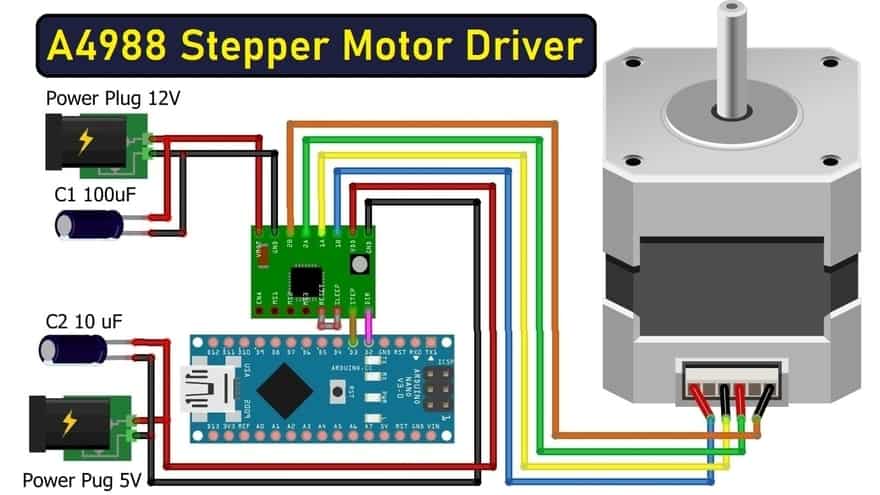
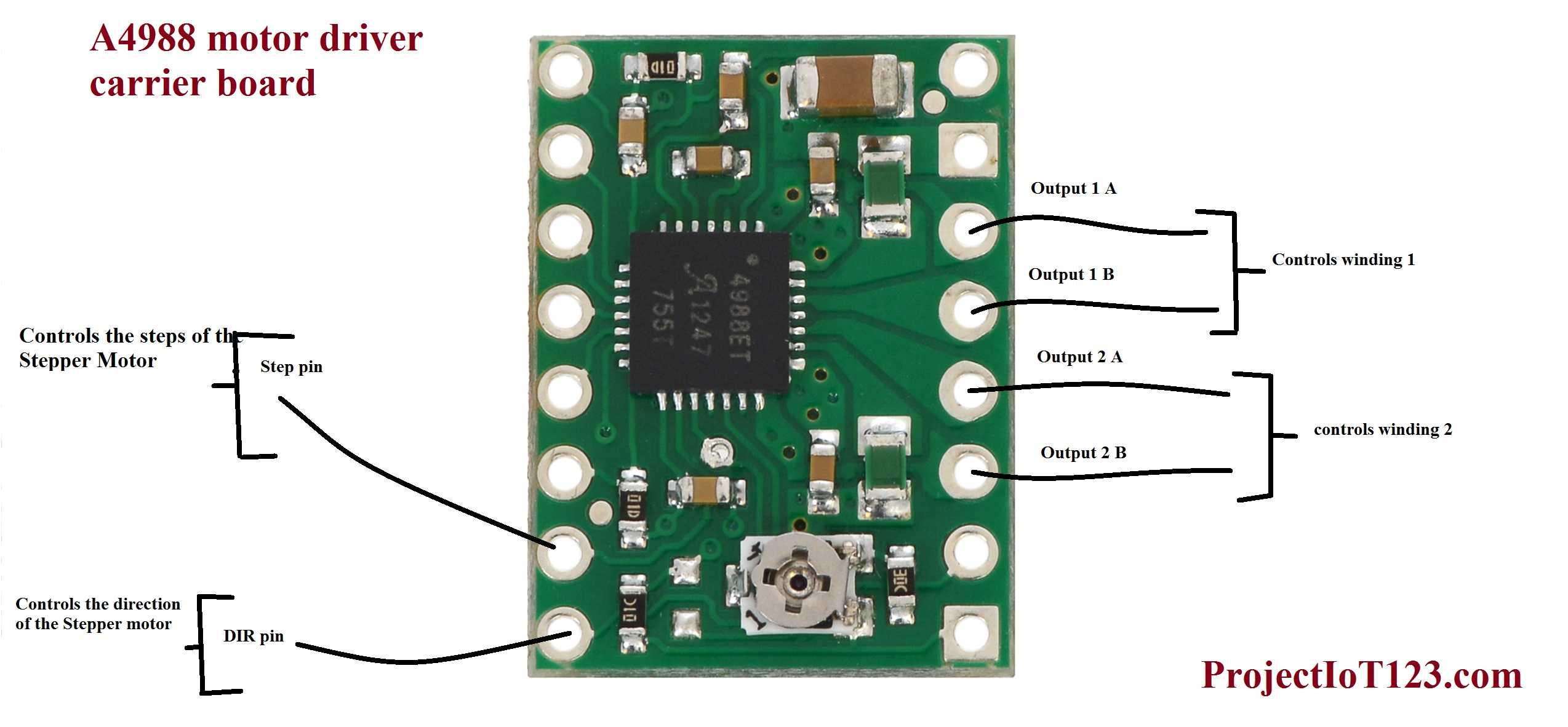
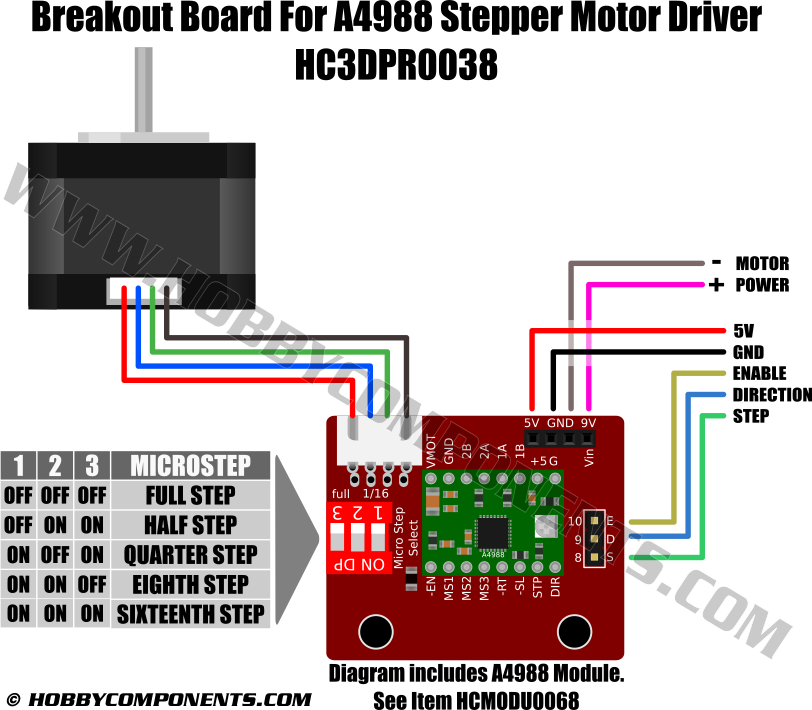
Для более простого подключения шагового двигателя к Arduino или другому микроконтроллеру существуют модули. Модули бывают разные, на фото ниже приведен пример двух различных модулей.

Распиновку и как подключать модуль драйвера DRV8825 будем рассматривать в следующей статье.
Использование драйвера DRV8825 с CNC shield v3.
Драйвер DRV8825 можно установить на CNC shield v3. CNC shield используются для управления ЧПУ станками и облегчают сборку электроники.
Данный набор позволяет без пайки собрать электронику для двух осевых, трех осевых, четырех осевых ЧПУ станков, а также для самостоятельной сборки 3D принтеров. При реализации ЧПУ станков данные шилды используются достаточно часто благодаря своей низкой цене и простоте сборки. Более подробно CNC shield v3 будем рассматривать в следующих статьях.
Вывод можно сделать следующий. Драйвер DRV8825 обладает рядом преимуществ перед драйвером A4988. А также, при использовании драйвера шагового двигателя DRV8825, меньше шума от шаговых двигателей. Это актуально при сборке лазерного гравера, 3D принтера. Когда при работе главный источник шума — это механика и гул шаговых двигателей.
Понравился статья Драйвер шагового двигателя DRV8825? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу , в группу на .
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье
Файлы для скачивания
Скачивая материал, я соглашаюсь с
Правилами скачивания и использования материалов.
| drv8825-datasheet.pdf | 743 Kb | 359 | Скачать |
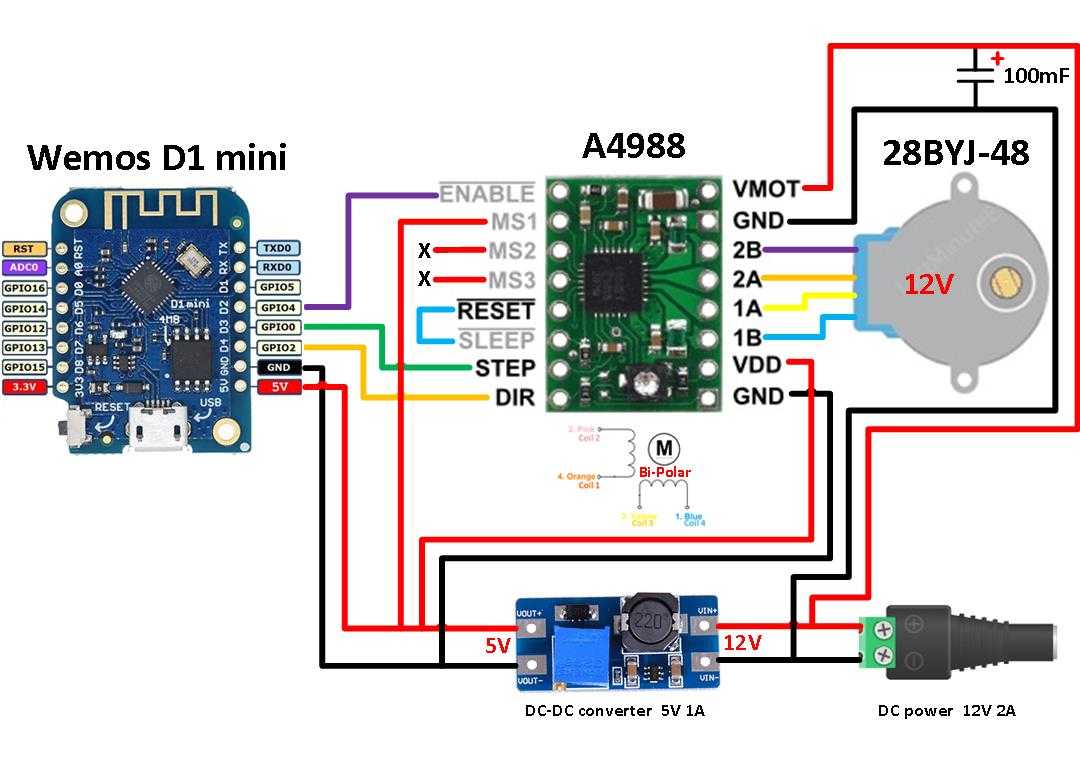
Подключение шагового двигателя 28BYJ-48-5V к Arduino. Часть 1.
Общие принципы работы шаговых двигателей
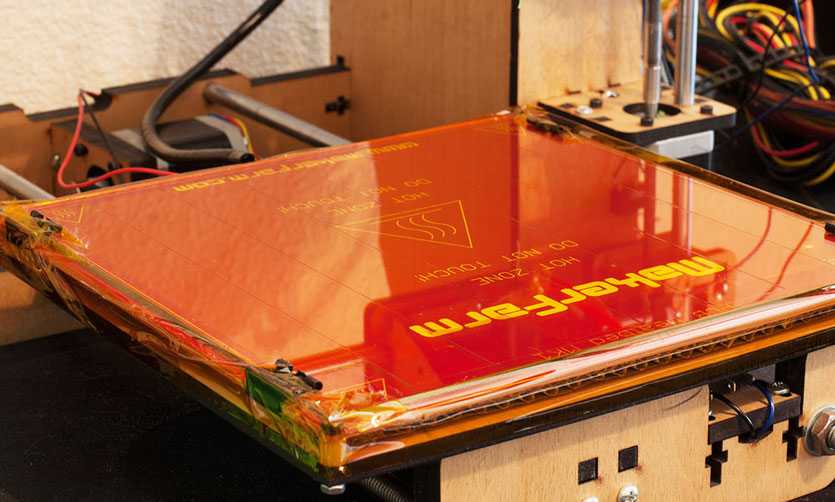
Столик, пружины, стекло, концевики

Платформа, на которой будет расположена 3D-модель, должна иметь обязательный подогрев. Температуры тут доходят до 100 – 110 градусов по Цельсию в зависимости от типа пластика.
Самый доступный и проверенный временем вариант – MK2 размером 214 х 214 мм. Не забудьте приобрести пружины для столика (нужно 4 штуки). С ними намного легче выставлять уровень сопла.
Сверху столик накрывают обычным стеклом толщиной 3-4 мм. В идеале – зеркалом. Размеры 200 х 200 мм с небольшими скосами по краям для крепежа винтов. Цена вопроса у стекольщика – около 60 рублей, везти из Китая нет смысла.
Концевые выключатели — специальные механические кнопки, которые будут ограничивать размеры стола и «пояснять» электронике где конец рабочей области принтера. Как вариант, недорогие KW12-3. Нужно 3 штуки (по одному на каждую ось).