
Учебное пособие по акселерометру и гироскопу MPU6050. Подключение к Ардуино
MPU6050 имеет 3-осевой акселерометр и 3-осевой гироскоп, интегрированные в один чип. Гироскоп измеряет скорость вращения или скорость изменения углового положения во времени по осям X, Y и Z. Для измерения используется технология MEMS и эффект Кориолиса.
Выходные данные гироскопа измеряются в градусах в секунду, поэтому для получения углового положения нам просто нужно интегрировать угловую скорость.
С другой стороны, акселерометр MPU6050 измеряет ускорение. Вкратце, он может измерять гравитационное ускорение по трем осям, и используя некоторую тригонометрию, мы можем вычислить угол, под которым расположен датчик. Итак, если мы объединим данные акселерометра и гироскопа, мы сможем получить очень точную информацию об ориентации датчика в пространстве.
MPU6050 также называют устройством слежения за движением по шести осям или устройством с 6 степенями свободы (шесть степеней свободы) из-за его 6 выходов, или 3 выхода акселерометра и 3 выхода гироскопа.
Ардуино и MPU6050
Давайте посмотрим, как мы можем подключить и прочитать данные с датчика MPU6050 с помощью Ардуино. Для связи с Ардуино мы используем протокол I2C, поэтому нам нужны всего два провода для подключения по линии данных и два провода для питания.

Скетч MPU6050 Ардуино
Ниже приведем полный код, а после разъясним его поподробнее:
Описание кода: Итак, сначала нам нужно подключить библиотеку Wire.h, которая используется для I2C связи, и определить некоторые переменные, необходимые для хранения данных.
В разделе setup() нам нужно инициализировать библиотеку Wire.h и сбросить датчик через регистр управления . Для этого нам нужно взглянуть в datasheet, где мы можем увидеть адрес регистра:

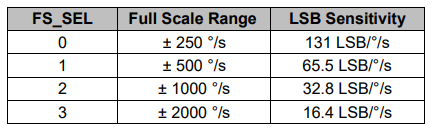
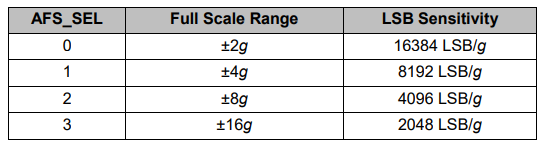
Также, если мы хотим, мы можем выбрать полный диапазон для акселерометра и гироскопа, используя их регистры конфигурации. В этом примере мы будем использовать диапазон по умолчанию + — 2g для акселерометра и диапазон 250 градусов/с для гироскопа, поэтому оставим эту часть кода закомментированной:
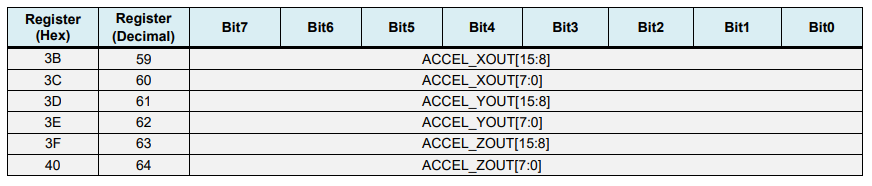
В разделе loop() мы начинаем с чтения данных акселерометра. Данные для каждой оси хранятся в двух байтах или регистрах, и мы можем видеть адреса этих регистров в datasheet датчика:
Чтобы прочитать их все, мы начинаем с первого регистра и с помощью функции RequiestFrom() запрашиваем чтение всех 6 регистров для осей X, Y и Z. Затем мы читаем данные из каждого регистра, и, поскольку выходные данные состроят из старшего и младшего байта, мы соответствующим образом объединяем их, чтобы получить правильные значения:
Чтобы получить выходные значения от -1g до + 1g, подходящие для расчета углов, мы делим выходной сигнал с предварительно выбранной чувствительностью.
Наконец, используя две формулы, мы вычисляем углы крена и тангажа на основе данных акселерометра:
Далее тем же методом получаем данные гироскопа:
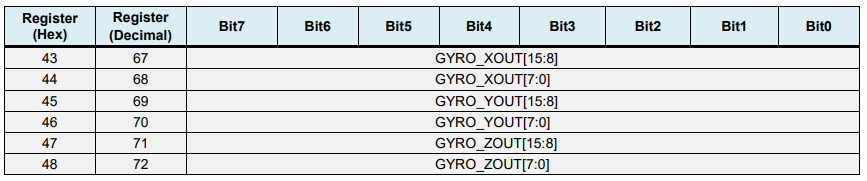
Мы считываем шесть регистров гироскопа, соответствующим образом объединяем их данные и делим их на предварительно выбранную чувствительность, чтобы получить результат в градусах в секунду:

Здесь вы можете заметить, что выходные значения корректируются на величину ошибок (объясним далее). Поскольку выходные данные выражаются в градусах в секунду, то нам нужно умножить их на время, чтобы получить только градусы. Значение времени фиксируется перед каждой итерацией чтения с помощью функции millis().
Наконец, мы объединяем данные акселерометра и гироскопа с помощью дополнительного фильтра. Здесь мы берем 96% данных гироскопа, потому что они очень точны и не подвержены внешним воздействиям.
Обратной стороной гироскопа является то, что он дрейфует или вносит ошибку в выходной сигнал с течением времени. Поэтому в долгосрочной перспективе мы используем данные акселерометра, в данном случае 4%, что достаточно для устранения ошибки дрейфа гироскопа.
Однако, поскольку мы не можем рассчитать рыскание по данным акселерометра, мы не можем реализовать для него дополнительный фильтр.
Прежде чем мы взглянем на результаты, объясним, как получить значения коррекции ошибок. Для вычисления этих ошибок мы можем вызвать пользовательскую функцию calculate_IMU_error(), когда датчик находится в неподвижном положении.
Здесь мы делаем 200 измерений для всех выходов, суммируем их и делим на 200. Поскольку мы удерживаем датчик в горизонтальном неподвижном положении, ожидаемые выходные значения должны быть 0. Таким образом, с помощью этого расчета мы можем получить среднюю ошибку датчика.
Мы просто печатаем значения на последовательном мониторе, и, узнав их, мы можем реализовать их в коде, как показано ранее, как для расчета крена, так и для тангажа, а также для трех выходов гироскопа.
Учебное пособие по акселерометру и гироскопу MPU6050. Подключение к Ардуино
MPU6050 имеет 3-осевой акселерометр и 3-осевой гироскоп, интегрированные в один чип. Гироскоп измеряет скорость вращения или скорость изменения углового положения во времени по осям X, Y и Z. Для измерения используется технология MEMS и эффект Кориолиса.
Выходные данные гироскопа измеряются в градусах в секунду, поэтому для получения углового положения нам просто нужно интегрировать угловую скорость.
С другой стороны, акселерометр MPU6050 измеряет ускорение. Вкратце, он может измерять гравитационное ускорение по трем осям, и используя некоторую тригонометрию, мы можем вычислить угол, под которым расположен датчик. Итак, если мы объединим данные акселерометра и гироскопа, мы сможем получить очень точную информацию об ориентации датчика в пространстве.
MPU6050 также называют устройством слежения за движением по шести осям или устройством с 6 степенями свободы (шесть степеней свободы) из-за его 6 выходов, или 3 выхода акселерометра и 3 выхода гироскопа.
Ардуино и MPU6050
Давайте посмотрим, как мы можем подключить и прочитать данные с датчика MPU6050 с помощью Ардуино. Для связи с Ардуино мы используем протокол I2C, поэтому нам нужны всего два провода для подключения по линии данных и два провода для питания.
Скетч MPU6050 Ардуино
Ниже приведем полный код, а после разъясним его поподробнее:
Описание кода: Итак, сначала нам нужно подключить библиотеку Wire.h, которая используется для I2C связи, и определить некоторые переменные, необходимые для хранения данных.
В разделе setup() нам нужно инициализировать библиотеку Wire.h и сбросить датчик через регистр управления . Для этого нам нужно взглянуть в datasheet, где мы можем увидеть адрес регистра:
Также, если мы хотим, мы можем выбрать полный диапазон для акселерометра и гироскопа, используя их регистры конфигурации. В этом примере мы будем использовать диапазон по умолчанию + — 2g для акселерометра и диапазон 250 градусов/с для гироскопа, поэтому оставим эту часть кода закомментированной:
В разделе loop() мы начинаем с чтения данных акселерометра. Данные для каждой оси хранятся в двух байтах или регистрах, и мы можем видеть адреса этих регистров в datasheet датчика:
Чтобы прочитать их все, мы начинаем с первого регистра и с помощью функции RequiestFrom() запрашиваем чтение всех 6 регистров для осей X, Y и Z. Затем мы читаем данные из каждого регистра, и, поскольку выходные данные состроят из старшего и младшего байта, мы соответствующим образом объединяем их, чтобы получить правильные значения:
Чтобы получить выходные значения от -1g до + 1g, подходящие для расчета углов, мы делим выходной сигнал с предварительно выбранной чувствительностью.
Наконец, используя две формулы, мы вычисляем углы крена и тангажа на основе данных акселерометра:
Далее тем же методом получаем данные гироскопа:
Мы считываем шесть регистров гироскопа, соответствующим образом объединяем их данные и делим их на предварительно выбранную чувствительность, чтобы получить результат в градусах в секунду:
Здесь вы можете заметить, что выходные значения корректируются на величину ошибок (объясним далее). Поскольку выходные данные выражаются в градусах в секунду, то нам нужно умножить их на время, чтобы получить только градусы. Значение времени фиксируется перед каждой итерацией чтения с помощью функции millis().
Наконец, мы объединяем данные акселерометра и гироскопа с помощью дополнительного фильтра. Здесь мы берем 96% данных гироскопа, потому что они очень точны и не подвержены внешним воздействиям.
Обратной стороной гироскопа является то, что он дрейфует или вносит ошибку в выходной сигнал с течением времени. Поэтому в долгосрочной перспективе мы используем данные акселерометра, в данном случае 4%, что достаточно для устранения ошибки дрейфа гироскопа.
Однако, поскольку мы не можем рассчитать рыскание по данным акселерометра, мы не можем реализовать для него дополнительный фильтр.
Прежде чем мы взглянем на результаты, объясним, как получить значения коррекции ошибок. Для вычисления этих ошибок мы можем вызвать пользовательскую функцию calculate_IMU_error(), когда датчик находится в неподвижном положении.
Здесь мы делаем 200 измерений для всех выходов, суммируем их и делим на 200. Поскольку мы удерживаем датчик в горизонтальном неподвижном положении, ожидаемые выходные значения должны быть 0. Таким образом, с помощью этого расчета мы можем получить среднюю ошибку датчика.
Мы просто печатаем значения на последовательном мониторе, и, узнав их, мы можем реализовать их в коде, как показано ранее, как для расчета крена, так и для тангажа, а также для трех выходов гироскопа.
Подготовка приложения на Android
Приложение на Android для нашего проекта мы разработали с помощью бесплатной программной среды Processing IDE, программирование в которой очень похоже на программирование в Arduino. Ранее на нашем сайте программную среду Processing мы использовали в следующих проектах:
- игра в Ping Pong на основе Arduino;
- радар на Arduino;
- проект виртуальной реальности на Arduino.
В этом проекте вы можете скачать либо готовый APK файл приложения, не утруждая себя погружением в среду Processing, либо можете скачать исходные коды приложения если все таки хотите в нее погрузиться и изменить что либо в нашей программе.
Примечание: это приложение будет корректно работать если только Bluetooth устройство имеет имя “HC-06”. Чтобы установить приложение на смартфон разрешите в нем установку приложений из непроверенных источников.

Объяснение кода приложения для Android
Внутри скачанного ZIP файла вы найдете папку, в которой находятся все изображения и другие данные, необходимые для работы android приложения.
В следующей строке кода программы мы указываем с каким Bluetooth устройством необходимо автоматически соединиться приложению.
bt.connectToDeviceByName(«HC-06»);
| 1 | bt.connectToDeviceByName(«HC-06»); |
Внутри функции draw(), которая представляет собой бесконечный цикл, мы будем рисовать изображения и печатать текст на экране смартфона в зависимости от данных, принимаемых по Bluetooth.
void draw() //The infinite loop
{
background(0);
imageMode(CENTER);
image(logo, width/2, height/1.04, width, height/12);
load_images();
textfun();
getval();
}
|
1 |
voiddraw()//The infinite loop { background(); imageMode(CENTER); image(logo,width2,height1.04,width,height12); load_images(); textfun(); getval(); } |
Также помните о том, что в программе для Arduino мы разделили передаваемые данные на три части и поместили их все в диапазон от 0 до 255. Здесь же мы должны распаковать эти данные и вернуть им нормальные значения.
if (info<100 && info>0)
x = map(info, 0, 100, -(width/1.5)/3, +(width/1.5)/3);//x = info;
else if (info<200 && info>100)
y = map(info, 100, 200, -(width/4.5)/0.8, +(width/4.5)/0.8);//y = info;
else if (info>200)
temp = info -200;
println(temp,x,y);
|
1 |
if(info<100&&info>) x=map(info,,100,-(width1.5)3,+(width1.5)3);//x = info; elseif(info<200&&info>100) y=map(info,100,200,-(width4.5)0.8,+(width4.5)0.8);//y = info; elseif(info>200) temp=info-200; println(temp,x,y); |
Arduino and MPU6050
Let’s take a look how we can connect and read the data from the MPU6050 sensor using the Arduino. We are using the I2C protocol for communication with the Arduino so we need only two wires for connecting it, plus the two wires for powering.
You can get the components needed for this Arduino Tutorial from the links below:
- MPU6050 IMU …………………………..…. Amazon / Banggood / AliExpress
- Arduino Board ………………………….….. Amazon / Banggood / AliExpress
- Breadboard and Jump Wires ………… Amazon / Banggood / AliExpress
Disclosure: These are affiliate links. As an Amazon Associate I earn from qualifying purchases.
Назначение связки гироскоп и акселерометр
Для начала давайте разберёмся, зачем Arduino mpu 6050 (Gy-521) вообще нужен и что собой представляет гироскоп-акселерометр в целом. Такой датчик все мы видели в смартфонах, и там он выполняет следующие функции:
- Позволяет замерять шаги. Акселерометр способен отслеживать резкие движения устройства, а в зависимости от его настройки и чувствительности, считать некоторые из них за шаг.
- Измеряет поворот экрана. Здесь уже оба устройства работают в паре. Ведь когда вы поворачиваете смартфон набок, картинка должна изменить свою ориентацию для пользователя, и лишь с помощью гироскопа удаётся определить угол наклона, под которым ПО это должно будет сделать.
- Компас, карты и навигация. Акселерометр с гироскопом позволяют определить ориентацию устройства в пространстве, что необходимо в различных приложениях для мобильной навигации.
Вот и выходит, что данный датчик подойдёт для тех проектов, в которых вам необходимо измерить ориентацию или движения прибора в пространстве, без точных данных о его местоположении. Это может быть, как самодельная линейка со встроенным уровнем, чтобы пользователь мог определить, насколько ровно стоит та или иная мебель, так и устройство для кровати, встроенной в стену, включающее свет, когда она выдвигается.
Но применить модуль можно и с большей выдумкой, например, для измерения количества оборотов в секунду и регуляции мощности охладительной системы или автоматизации различных процессов.
Всё зависит исключительно от вашей выдумки и конкретного проекта.
Смотрите по теме: Подключаем гироскоп-акселерометр (MPU-6050) к плате Arduino
Чаще всего гироскоп для Ардуино применяется в системах автоматизации под так называемые «смартхаусы» (умные дома — прим. ред.), являясь своеобразным переключателем. Передавая определённые данные в МК, который затем отправляет их по блютуз-модулю к другому устройству, он может управлять всей техникой в доме.
Ещё один простой способ применения – использование вместо датчика движения на дверях, для включения света и кондиционирования, когда вы возвращаетесь домой.
Тестирование
После отладки необходимо провести тестирование. В чём разница? При тестировании вы точно знаете, что программный код работает без лагов и багов, но вам необходимо убедиться, что в нём нет логических ошибок.
С акселерометром и гироскопом проще всего использовать программы 3Д рендеринга показаний, вроде ShowGY521Data, которые позволят в реальном времени увидеть, как железо позиционируется в пространстве. В случае неисправностей всегда можно подправить нулевой уровень и уменьшить чувствительность акселерометра, который также влияет на конечную модель отображения устройства.
- https://mysku.ru/blog/china-stores/40178.html
- https://robotclass.ru/tutorials/arduino-accelerometer-mpu6050/
- https://arduinoplus.ru/arduino-giroskop/
Шаг 3. Программируем Arduino для обработки информации, полученной с акселерометра
Алгоритм написания программы в последовательности:
// Подключаем необходимые для работы библиотек
#include "MPU6050.h";
#include "I2Cdev.h";
#include "Wire.h";
// Создаем объект, символизирующий модуль датчика
MPU6050 axeler;
// Создаем объект библиотеки Wire
Wire b;
// Создаем объект, который символизирует контакт I2C
I2Cdev h;
// Вводим цифровые данные, отвечающие за точки в 3-х осях
int16_t axx, axy, axz;
int16_t gix, giy, giz;
// Объявляем метод, который будет запускать программу
void setup()
{
// Начинаем работу
Wire.begin();
h.begin(38400);
// Производим инициализацию, отчет выводится после компиляции
h.println("Initializing I2C devices...");
axeler.initialize();
delay(100);
}
// Считываем значения гироскопа и акселерометра с помощью адресов, которые принадлежат описанным выше переменным
void loop()
{
axeler.getMotion6(&axx, &axy, &axz, &gix, &giy, &giz);
// Выводим получившиеся значения на экран
h.print("a/g:\t");
h.print(axx);
h.print("\t");
h.print(axy);
hl.print("\t");
hl.print(axz);
h.print("\t");
h.print(gix);
h.print("\t");
h.print(giy);
h.print("\t");
h.println(giz);
}
Вуаля! Акселерометр Аrduino запрограммирован.
В принципе, для разнообразия можно написать еще один скетч (ниже), но тогда нам нужна будет еще одна библиотека — Kalman (Gy-521, mpu6050), которая преобразует показания координат X и Y.
#include <Wire.h>
#include "Kalman.h"
Kalman kalmanX;
Kalman kalmanY;
uint8_t IMUAddress = 0x68;
/* IMU Data */
int16_t accX;
int16_t accY;
int16_t accZ;
int16_t tempRaw;
int16_t gyroX;
int16_t gyroY;
int16_t gyroZ;
double accXangle; // Angle calculate using the accelerometer
double accYangle;
double temp;
double gyroXangle = 180; // Angle calculate using the gyro
double gyroYangle = 180;
double compAngleX = 180; // Calculate the angle using a Kalman filter
double compAngleY = 180;
double kalAngleX; // Calculate the angle using a Kalman filter
double kalAngleY;
uint32_t timer;
void setup() {
Wire.begin();
Serial.begin(9600);
i2cWrite(0x6B,0x00); // Disable sleep mode
kalmanX.setAngle(180); // Set starting angle
kalmanY.setAngle(180);
timer = micros();
}
void loop() {
/* Update all the values */
uint8_t* data = i2cRead(0x3B,14);
accX = ((data << 8) | data);
accY = ((data << 8) | data);
accZ = ((data << 8) | data);
tempRaw = ((data << 8) | data);
gyroX = ((data << 8) | data);
gyroY = ((data << 8) | data);
gyroZ = ((data << 8) | data);
/* Calculate the angls based on the different sensors and algorithm */
accYangle = (atan2(accX,accZ)+PI)*RAD_TO_DEG;
accXangle = (atan2(accY,accZ)+PI)*RAD_TO_DEG;
double gyroXrate = (double)gyroX/131.0;
double gyroYrate = -((double)gyroY/131.0);
gyroXangle += kalmanX.getRate()*((double)(micros()-timer)/1000000); // Calculate gyro angle using the unbiased rate
gyroYangle += kalmanY.getRate()*((double)(micros()-timer)/1000000);
kalAngleX = kalmanX.getAngle(accXangle, gyroXrate, (double)(micros()-timer)/1000000); // Calculate the angle using a Kalman filter
kalAngleY = kalmanY.getAngle(accYangle, gyroYrate, (double)(micros()-timer)/1000000);
timer = micros();
Serial.println();
Serial.print("X:");
Serial.print(kalAngleX,0);
Serial.print(" ");
Serial.print("Y:");
Serial.print(kalAngleY,0);
Serial.println(" ");
// The accelerometer's maximum samples rate is 1kHz
}
void i2cWrite(uint8_t registerAddress, uint8_t data){
Wire.beginTransmission(IMUAddress);
Wire.write(registerAddress);
Wire.write(data);
Wire.endTransmission(); // Send stop
}
uint8_t* i2cRead(uint8_t registerAddress, uint8_t nbytes) {
uint8_t data;
Wire.beginTransmission(IMUAddress);
Wire.write(registerAddress);
Wire.endTransmission(false); // Don't release the bus
Wire.requestFrom(IMUAddress, nbytes); // Send a repeated start and then release the bus after reading
for(uint8_t i = 0; i < nbytes; i++)
data = Wire.read();
return data;
}
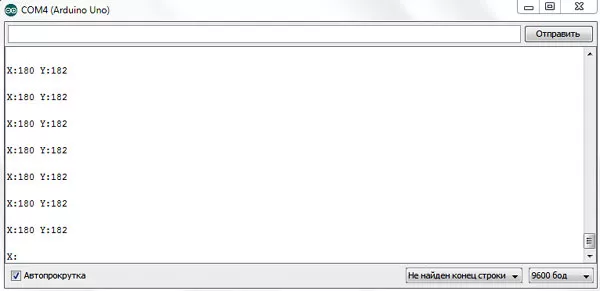
После второго скетча вы на экране сможете увидеть подобные цифры:
Комплектующие
Создаётся данный датчик или МК, в зависимости от того, что вы собрались приобретать, из компонентов ATmega328.
Распиновка модуля Arduino MPU 6050
Так, в нём имеются:
- 14 штук различных пинов и цифровых выходов, половина из которых являются ШИМ-выходами.
- Специальные кварцевые резонаторы до 16 МГц мощностью.
- Встроенный вход под usb-кабель, который позволит вам сэкономить не только время, но и деньги, которые вы могли бы потратить на покупку адаптера.
- Контакты и распиновка для стандартного питания с нулем, фазой и заземлением.
- Контакты для сброса до заводских настроек, при которых весь машинный код и данные будут стёрты. Это полезно в том случае, если вы напортачили с программой и модуль превратился в бесполезную груду железа, и просто как экономия времени, если необходимо сменить прошивку.
- ICSP контакт, который необходим для того, чтобы запрограммировать машинный код, который будет находиться внутри системы.
Все эти компоненты и составляют Arduino гироскоп, позволяя ему выполнять свои базовые функции. Но как же запрограммировать систему, если вы до этого не имели опыта работа с данными МК?
MPU6050 Orientation Tracking – 3D Visualization
Next, in order to make the 3D visualization example we just need accept this data the Arduino is sending through the serial port in the Processing development environment. Here’s the complete Processing code:
Here we read the incoming data from the Arduino and put it into the appropriate Roll, Pitch and Yaw variables. In the main draw loop, we use these values to rotate the 3D object, in this case that’s a simple box with a particular color and text on it.
If we run the sketch, we can see how good the MPU6050 sensor is for tracking orientation. The 3D object tracks the orientation of the sensor quite accurate and it’s also very responsive.
As I mentioned, the only down side is that the Yaw will drift over time because we cannot use the complementary filter for it. For improving this we need to use an additional sensor. That’s usually a magnetometer which can be used as a long-term correction for the gyroscope Yaw drift. However, the MPU6050 actually have a feature that’s called Digital Motion Processor which is used for onboard calculations of the data and it’s capable of eliminating the Yaw drift.
Here’s the same 3D example with the Digital Motion Processor in use. We can see how accurate the orientation tracking is now, without the Yaw drift. The onboard processor can also calculate and output Quaternions which are used for representing orientations and rotations of objects in three dimensions. In this example we are actually using quaternions for representing the orientation which also doesn’t suffer from Gimbal lock which occurs when using Euler angles.
Nevertheless, getting this data from the sensor is a bit more complicated than what we explained earlier. First of all, we need to connect and additional wire to an Arduino digital pin. That’s an interrupt pin which is used for reading this data type from the MPU6050.
The code is also a bit more complicated so that’s why we are going to use the i2cdevlib library by Jeff Rowberg. This library can be downloaded from GitHub and I will include a link to in on the website article.
Once we install the library, we can open the MPU6050_DMP6 example from the library. This example is well explained with comments for each line.
Here we can select what kind of output we want, quaternions, Euler angles, yaw, pitch and roll, accelerations value or quaternions for the 3D visualization. This library also includes a Processing sketch for the 3D visualization example. I just modified it to get the box shape as in the previous example. Here’s the 3D visualization Processing code that works with the MPU6050_DPM6 example, for selected “OUTPUT_TEAPOT” output:
So here using the serialEvent() function we receive the quaternions coming from the Arduino, and in the main draw loop we use them to rotate the 3D object. If we run the sketch, we can see how good quaternions are for rotating objects in three dimensions.
In order not to overload this tutorial, I placed the second example, the DIY Arduino Gimbal or Self-Stabilizing platform, on a separate article.
Feel free to ask any question related to this tutorial in the comments section below and also don’t forget to check my collection of Arduino Projects.
Introduction: Arduino — MPU6050 GY521 — 6 Axis Accelerometer + Gyro (3D Simulation With Processing)
 By MertArduinoMaker 101Follow
By MertArduinoMaker 101Follow
More by the author:
About: Maker 101; Beginner and intermediate level Maker projects! You can find projects such as «How to» and «DIY» on programmable boards such as Arduino, ESP8266, ESP32 and Raspberry Pi on this channel. The projects…
More About MertArduino »
* In this tutorial we will learn how to use MPU6050 6 Axis Accelerometer + Gyro module and GY 521 breakout boards.
* Also we will install the necessary libraries to Arduino IDE.
* And last, we would run the simple simulation with this module using the Processing.
* We can make Quadcopter Drone, RC Plane and Robotic projects using with the MPU6050 module.