
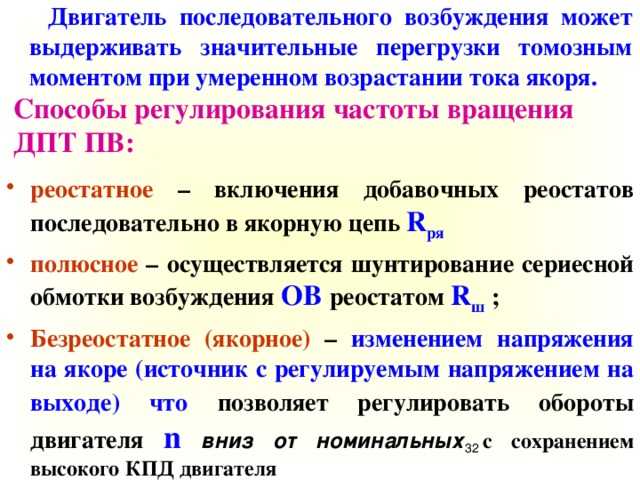
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Важные страницы
- Набор GyverKIT – большой стартовый набор Arduino моей разработки, продаётся в России
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с AliExpress у проверенных продавцов
- Подборка библиотек для Arduino, самых интересных и полезных, официальных и не очень
- Полная документация по языку Ардуино, все встроенные функции и макро, все доступные типы данных
- Сборник полезных алгоритмов для написания скетчей: структура кода, таймеры, фильтры, парсинг данных
- Видео уроки по программированию Arduino с канала “Заметки Ардуинщика” – одни из самых подробных в рунете
- Поддержать автора за работу над уроками
- Обратная связь – сообщить об ошибке в уроке или предложить дополнение по тексту ()
5 / 5 ( 7 голосов )
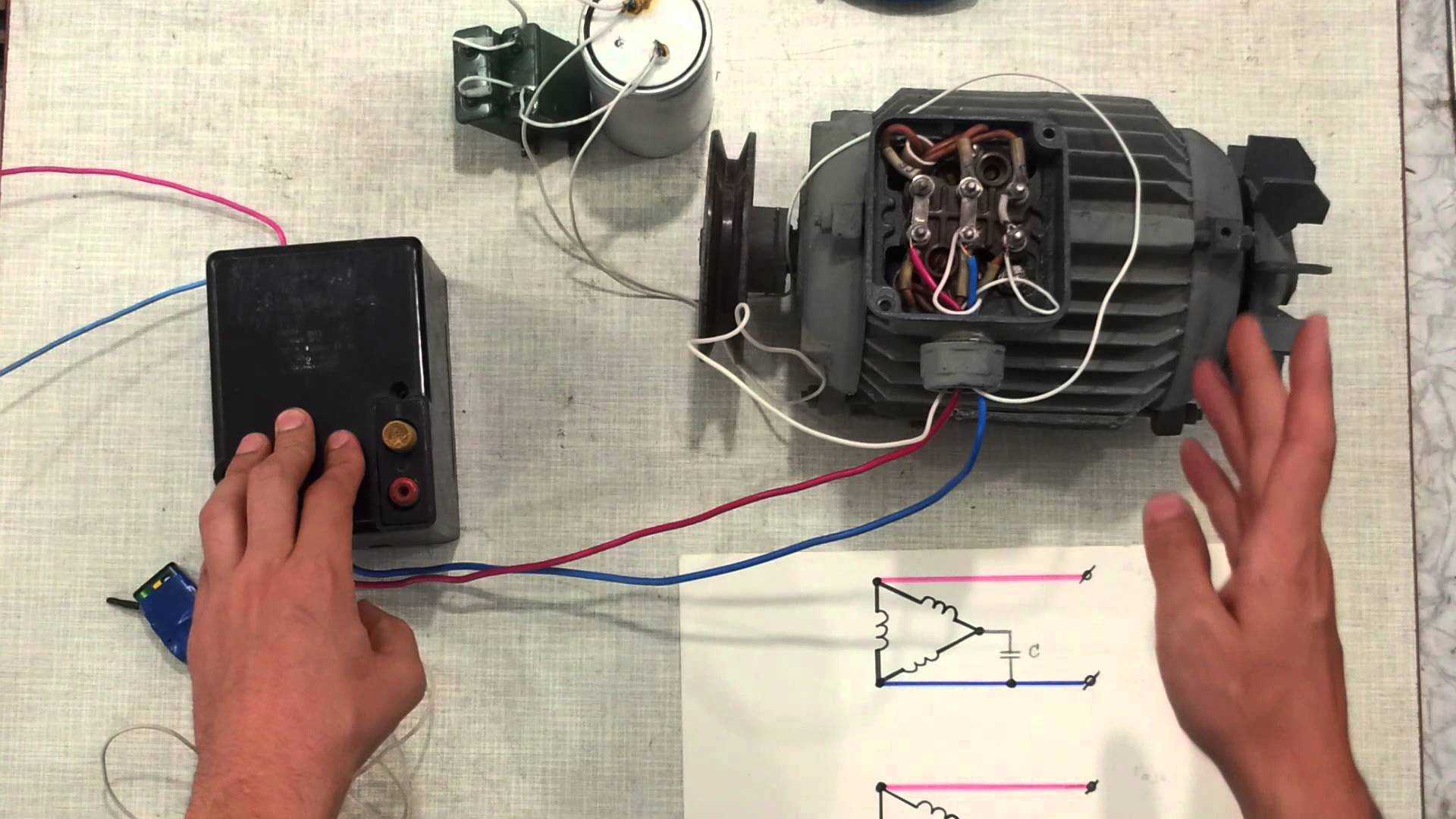
К однофазной сети
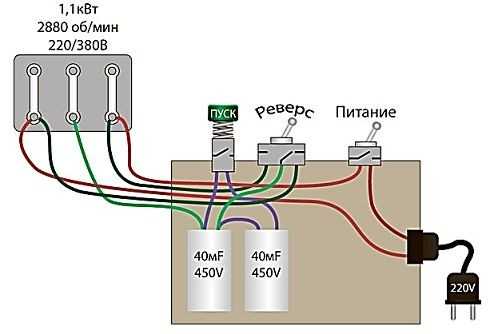
В домашних условиях часто приходится задействовать асинхронный двигатель, но не в каждом хозяйстве есть трехфазная сеть, поэтому важно знать, как подключить двигатель к однофазной сети. Для запуска от одной фазы требуется дополнительный импульс, чтобы его обеспечить подбирается конденсатор требуемой емкости
Если говорить проще, то конденсаторов должно быть два. Один из них является пусковым и подключается параллельно первому. Соединение обмоток двигателя выполняется по схеме «звезда». Если обмотки соединены другим способом и нет возможности его изменить, тогда не получиться выполнить требуемую схему.

Чтобы реверсивная схема функционировала потребуется переключение питания, которое поступает от конденсаторов между полюсами. Понадобится два выключателя и одна не фиксируемая кнопка. Одни из выключателей будет отвечать за подачу напряжения в цепь питания двигателя. Второй выключатель должен иметь три положения. В одном из них он будет выключенным, а в двух других изменять подачу питания от конденсаторов на обмотки. Не фиксируемая кнопка будет дополнительно подключать второй конденсатор на момент запуска двигателя.
Два вывода конденсатора подключаются между собой. К двум другим происходит подключение пусковой кнопки. Средний вывод трехпозиционного переключателя подключается к конденсаторам в том месте, где они объединены между собой. Два других вывода подключаются к клеммам двигателя, на которые приходит питание. Конденсаторы подключаются к выходу обмотки, которая применяется для запуска. Кнопка включения ставится в разрыв фазного провода.
Чтобы привести весь механизм в действие, необходимо подать питание на цепь двигателя основным выключателем. После этого задается направление вращения двигателя трехпозиционным выключателем. Далее нажимается кнопка пуска до момента выхода двигателя на рабочие обороты. Если возникает необходимость изменить направление вращения, тогда потребуется обесточить двигатель и дождаться его полной остановки, переключить трехпозиционный тумблер в противоположное крайнее положение и повторить процесс.
Как видно реверсивное подключение требует определенных навыков, но может быть осуществлено без особых сложностей при соблюдении всех рекомендаций. Теперь не будет препятствий в использовании трехфазных агрегатов от однофазной сети, при этом следует понимать, что максимальная мощность будет ограничена, т. к. невозможен выход на полное потребление. На компонентах для подключения лучше не экономить, т. к. это скажется на сроке службы всей схемы. Во время сборки и запуска необходимо придерживаться всех правил безопасности работы с электрическим током.
От сети
Однофазные электродвигатели переменного тока также позволяют регулировать вращение ротора.
Коллекторные машины
Такие моторы стоят на электродрелях, электролобзиках и другом инструменте. Чтобы уменьшить или увеличить обороты, достаточно, как и в предыдущих случаях, изменять напряжение питания. Для этой цели также есть свои решения.
Конструкция подключается непосредственно к сети. Регулировочный элемент – симистор, управление которого осуществляется динистором. Симистор ставится на теплоотвод, максимальная мощность нагрузки – 600 Вт.
Если есть подходящий ЛАТР, можно все это делать при помощи его.
Двухфазный двигатель
Аппарат, имеющий две обмотки – пусковую и рабочую, по своему принципу является двухфазным. В отличие от трехфазного имеет возможность менять скорость ротора. Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством.
Есть две возможности контролирования числа оборотов:
- Менять амплитуду напряжения питания (Uy),
- Фазное – меняем емкость конденсатора.
Такие агрегаты широко распространены в быту и на производстве.
Обычные асинхронники
Электрические машины трехфазного тока, несмотря на простоту в эксплуатации, обладают рядом характеристик, которые нужно учитывать. Если просто изменять питающее напряжение, будет в небольших пределах меняться момент, но не более. Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого.
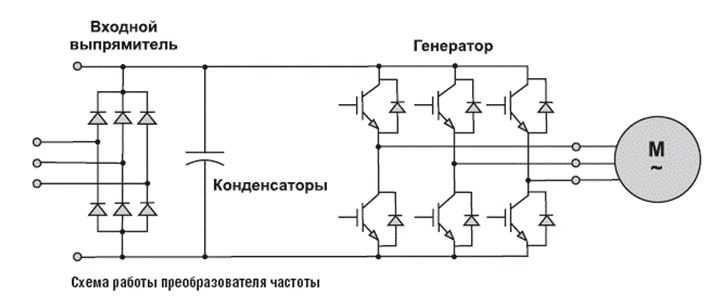
Для этой цели промышленностью налажен выпуск частотных преобразователей, помогающих менять обороты электродвигателя в нужном диапазоне.
Асинхронник набирает обороты в согласии с выставленными на частотнике параметрами, которые можно менять в широком диапазоне. Преобразователь – самое лучшее решение для таких двигателей.
Детали регуляторов вращения электродвигателей
В данных схемах возможно применить следующие замены радиодеталей: транзистор КТ817Б — КТ815, КТ805; КТ117А возможно поменять КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 возможно поменять мощным полевым транзистором, например, IRF3905 или ему подобный.
На основе мощного симистора BT138-600, можно собрать схему регулятора скорости вращения двигателя переменного тока. Эта схема предназначена для регулирования скорости вращения электродвигателей сверлильных машин, вентиляторов, пылесосов, болгарок и др. Скорость двигателя можно регулировать путем изменения сопротивления потенциометра P1. Параметр P1 определяет фазу запускающего импульса, который открывает симистор. Схема также выполняет функцию стабилизации, которая поддерживает скорость двигателя даже при большой его нагрузке.
Например, когда мотор сверлильного станка тормозит из-за повышенного сопротивления металла, ЭДС двигателя также уменьшается. Это приводит к увеличению напряжения в R2-P1 и C3 вызывая более продолжительное открывание симистора, и скорость соответственно увеличивается.



Принципиальная схема
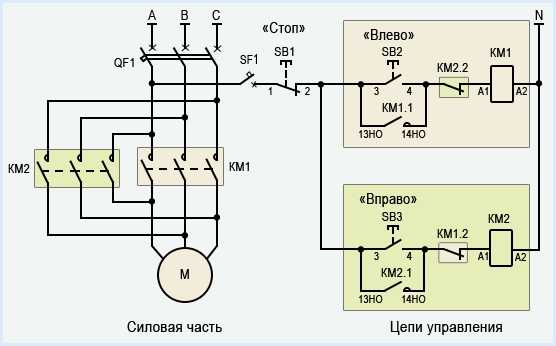
На иллюстрации выше можно видеть принципиальную схему реверсивного подключения двигателя. Она отличается от обычной только наличием дополнительного модуля. Если говорить точнее, то в схеме задействуется два модуля управления. Один из них заставляет вращаться двигатель вправо, а другой влево. Взаимодействие оператора с модулями происходит посредством кнопок SB2 и SB3. Латинскими буквами A, B, C на схеме обозначены подводящие линии трехфазной сети. Они подходят к общему выключателю, который обозначен QF1. Далее идут два контактора КМ и цифровым обозначением. От контакторов цепь уходит к обмоткам двигателя. Каждый из этих контакторов вынесен отдельно и находится справа, где дополнительно можно рассмотреть их составные компоненты.
Устройство и принцип работы
ДПТ по своему строению напоминает синхронный электродвигатель переменного тока, разница между ними только в типе потребляемого тока. Двигатель состоит из неподвижной части – статора или индуктора, подвижной части – якоря и щеточноколлекторного узла. Индуктор может быть выполненным в виде постоянного магнита, если двигатель маломощный, но чаще он снабжается обмоткой возбуждения, имеющей два или больше полюса. Якорь состоит из набора проводников (обмоток), закрепленных в пазах. В простейшей модели ДПТ использовались только один магнит и рамка, по которой проходил ток. Такую конструкцию можно рассматривать только в качестве упрощенного примера, тогда как современная конструкция – это усовершенствованный вариант, имеющий более сложное устройство и развивающий необходимую мощность.Принцип работы ДПТ основан на законе Ампера: если в магнитное поле поместить заряженную проволочную рамку, она начнет вращаться. Ток, проходя по ней, образует вокруг себя собственное магнитное поле, которое при контакте с внешним магнитным полем начнет вращать рамку. В случае с одной рамкой вращение будет продолжаться, пока она не займет нейтральное положение параллельно внешнему магнитному полю. Чтобы привести систему в движение, нужно добавить еще одну рамку. В современных ДПТ рамки заменены якорем с набором проводников. На проводники подается ток, заряжая их, в результате чего вокруг якоря возникает магнитное поле, которое начинает взаимодействовать с магнитным полем обмотки возбуждения. В результате этого взаимодействия якорь поворачивается на определенный угол. Далее ток поступает на следующие проводники и т.д.
Для попеременной зарядки проводников якоря используются специальные щетки, выполненные из графита или сплава меди с графитом. Они играют роль контактов, которые замыкают электрическую цепь на выводы пары проводников. Все выводы изолированы между собой и объединены в коллекторный узел – кольцо из нескольких ламелей, находящееся на оси вала якоря. Во время работы двигателя щетки-контакты поочередно замыкают ламели, что дает возможность двигателю вращаться равномерно. Чем больше проводников имеет якорь, тем более равномерно будет работать ДПТ.Двигатели постоянного тока делятся на:
— электродвигатели с независимым возбуждением;
— электродвигатели с самовозбуждением (параллельные, последовательные или смешанные).
Схема ДПТ с независимым возбуждением предусматривает подключение обмотки возбуждения и якоря к разным источникам питания, так что между собой они не связаны электрически.
Параллельное возбуждение реализовывается путем параллельного подключения обмоток индуктора и якоря к одному источнику питания. Двигатели этих двух типов обладают жесткими рабочими характеристиками. У них частота вращения рабочего вала не зависит от нагрузки, и ее можно регулировать
Такие двигатели нашли применение в станках с переменной нагрузкой, где важно регулировать скорость вращения вала
При последовательном возбуждении якорь и обмотка возбуждения подключены последовательно, поэтому значение электрического тока у них одинаковое. Такие двигатели более «мягкие» в работе, имеют больший диапазон регулирования скоростей, но требуют постоянной нагрузки на вал, иначе скорость вращения может достичь критической отметки
У них высокое значение пускового моменты, что облегчает запуск, но при этом скорость вращения вала зависит от нагрузки. Применяются они на электротранспорте: в кранах, электропоездах и городских трамваях.
Смешанный тип, при котором одна обмотка возбуждения подключается к якорю параллельно, а вторая – последовательно, встречается редко.
С двумя кнопками
Этой схемой Интернет буквально завален. Ведь она позволяет запускать двигатель и управлять направлением его вращения всего двумя обычными кнопками! Нажал на одну – мотор крутится влево. Нажал на другую – вправо. Не нажал – все отключено.
Теоретически все верно. Для питания электродвигателя М1 используется переменный ток. Пока ни одна из кнопок не нажата, двигатель не вращается, поскольку он подключен к питанию через диоды D1, D2, соединенные встречно-последовательно.
Как только мы нажмем на одну из кнопок, один из диодов окажется закорочен, а второй начнет работать как однополупериодный выпрямитель, подавая на мотор выпрямленное напряжение. Полярность этого напряжения, а значит, и направление вращения двигателя, будут зависеть от того, какая из кнопок нажата.
На практике же такая конструкция имеет огромный недостаток. Мощность электромотора, питаемого таким «криво» выпрямленным напряжением, составит не более 40 % от его номинала. Если учесть то, что КПД самого мотора обычно составляет порядка 50%, то нам останется только погрустить.
Моторы внутреннего сгорания
Этот тип моторов кардинально отличается от классического электрического привода, например, такого как асинхронный линейный двигатель, поскольку имеет принципиально иное устройство и метод работы. По сути это двигатель внутреннего сгорания, но без сложного и громоздкого кривошипно-шатунного механизма. Подобные типы линейных двигателей имеют мертвый (неподвижный) замкнутый контур, в объеме которого прямолинейно перемещаются один или два поршня. Свободное перемещение поршневого устройства обеспечивается сжатым воздушным потоком, находящимся в смежных емкостях, пружинным элементом и массой самого поршня.
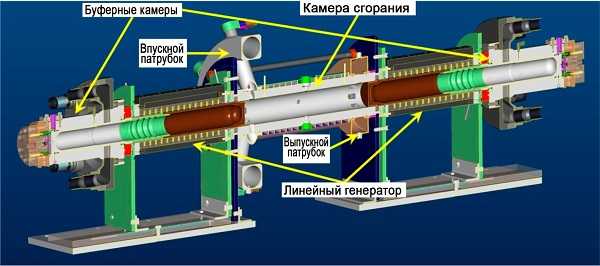
Линейные двигатели внутреннего сгорания имеют более простое конструктивное исполнение по сравнению с традиционным вариантом с кривошипно-шатунной системой. Они более уравновешенны, долговечны, обладают компактными размерами. На базе приводов этого типа выполняют электрические генераторы, дизель-молоты. Существенным недостатком свободно-поршневых агрегатов является сложный пуск и управление линейным двигателем. Это связано с отсутствием каких-либо жестких связей в составе приводного механизма
В большинстве случаев запуск установки осуществляется посредством сжатого воздуха. В то же время благодаря развитию микропроцессорных технологий проводят эксперименты в части электронного пуска и управления процессом. Такими способами являются:
- применение электрогенератора, который связывается с поршневым устройством;
- использование датчиков давления, движения и иных средств, обеспечивающих контролирование впрыска и зажигания подаваемой вовнутрь топливной смеси;
- электросхема с установкой такого элемента как электромагнитный клапан, размещаемый на вход и выход смеси для четкого контролирования ее объема.
Учитывая перспективность нового направления, многие энтузиасты выполняют расчет линейного механизма, после чего своими подручными средствами и собственными руками создают модели электрических генераторных машин. С этой целью цилиндрами служат трубки из стекла, поршнями становятся бобышки из графита, а источником искры – плата бытового устройства для розжига газовой плиты. При желании можно создать небольшой мотор и успешно его использовать как автономный источник электроэнергии. При этом необходимо учитывать, что при использовании постоянных магнитов должна быть организована достаточная система охлаждения. Это вызвано тем, что магнитные элементы имеют свойство при достижении определенного уровня температуры размагничиваться.
Вращающий момент электродвигателя
В двигателях постоянного тока вращающий момент определяется выражением М ≡ ФIя, т.е. он пропорционален потоку и току якоря. В асинхронном двигателе момент создается вращающимся потоком Ф и током ротора I2. Он может быть выражен
Следовательно, момент пропорционален потоку и активной слагающей тока ротора I2 cos Ψ2, так как только активная слагающая тока определяет мощность, а значит и момент.
На рис. 10-20 представлена схема включения короткозамкнутого двигателя. Если пустить двигатель, включив рубильник 1, то в первый момент пуска, когда п2= 0, a s = 1, наведенная в роторе 2 э. д. с. Е2 и пусковой ток I2п максимальны. Однако, пусковой момент Мп не будет максимальным, а в 2—2,5 раза меньше максимального. Векторная диаграмма для цепи ротора (рис. 10-21), построенная подобно изображенной на рис. 9-9, показывает причину этого.
Рис 10-20. Схема включения короткозамкнутого асинхронного двигателя.
Обычно в роторе х2во много раз больше r2 и угол Ψ2, на который ток I2п отстает от э. д. с. Е2 велик. Поэтому активная слагающая тока I2п cos Ψ2, а значит и пусковой момент Мп малы. В современных асинхронных двигателях Мп/Мп = 1 — 1,5, хотя I2п/ Iн≈ 4,5—6,5.
Это же явление по другому объясняется на рис. 10-19 и 10-22.
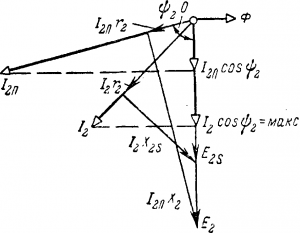
Рис. 10-21. Векторная диаграмма в цепи ротора.
При описании принципа работы двигателя (рис. 10-19) было предположено, что ток I2 совпадает по фазе с э. д. с. Е2, т. е. что он активный ( Ψ2 = 0). На рис. 10-22 представлен момент пуска, когда направление э. д. с. в проводах ротора соответствует обозначенному на рис. 10-19, а ток показан отстающим от э. д. с. на угол Ψ2. Тогда шесть проводов ротора (три под полюсом N и три под полюсом S) создают усилия, действующие в направлении вращения потока, а два провода вызывают противодействующие усилия. В результате этого вращающий момент будет тем меньше, чем больше сдвиг фаз между током I2 и э. д. с. E2.
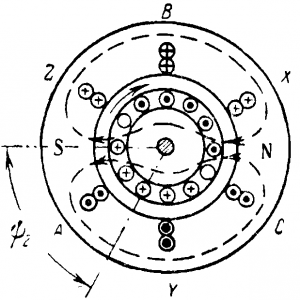
Рис. 10-22. Ток в роторе двигателя в момент пуска.
По мере увеличения скорости вращения ротора реактивное сопротивление обмотки ротора x2s = x2s уменьшается, а вместе с этим уменьшается угол Ψ2, так как сопротивление r2≈ const. Наступает такое положение (рис 10-21), когда при некотором скольжении sм ≈ 0,1—0,15 реактивное сопротивление x2s становится равным активному r2, угол Ψ — 45° и э. д. с. E2s уравновешивает два равных падения напряжения I 2r2 и I2x2s.В это время активная слагающая тока I2 cos Ψ2 и вращающий момент М м становятся максимальными, несмотря на некоторое уменьшение тока I2.
Обычно Мм/Мм = 1,8—2,5 и называется способностью к перегрузкe.
При дальнейшем разгоне ротора x2s становится значительно меньшим, чем r2, им можно пренебречь и считать ток ротора активным (I2 ≈ I2 cos Ψ 2). Так как E2s= E2s тоже продолжает уменьшаться, то вместе с током I2 уменьшается и вращающий момент.
Максимальная скоростьn вращения будет при холостом ходе двигателя и тогда n 2 ≈ n 1 , a s ≈ 0. Зависимость вращающего момента от скольжения М = f (s) представлена на рис. 10-23.
Рис. 10-23. Зависимость вращающего момента двигателя от скольжения.
Нормальная работа двигателя возможна только на участке кривой при скольжениях s от нуля до sм, так как в этом случае при увеличении тормозного момента и значит s вращающий момент возрастает. На участке от s = sм до s = 1 работа двигателя неустойчива. Номинальный момент Мн соответствует обычно номинальному скольжению sн = 1—6%.
Поток Ф пропорционален напряжению U1, подводимому к трансформатору. Сказанное остается в силе и для асинхронного двигателя. Так как М ≡ ФI2 cos Ψ 2, то можно написать, что

Отсюда можно сделать очень важный для асинхронных двигателей вывод
т. е. вращающий момент пропорционален квадрату подведенного к статору напряжения. Таким образом, падение напряжения в сети, например до 0,9 U1н, вызовет уменьшение момента до 0,9 • 0,9 Мн= 0,81 Мн и нагруженный двига тель может остановиться. Указанным обстоятельством и объясняется, частично, нормирование падения напряжения в распределительных сетях, питающих асинхронные двигатели.
В практике потребителя часто интересует механическая характеристика двигателя
п2= f (М) при U1= const и f1 = const. Для удобства пользования по осям откладывают (n2/n1)100% и (М/Мн)100%.
Рис. 10-24. Механическая характеристика двигателя.
Эта характеристика получается простым перестроением рис, 10-23 и показана на рис. 10-24, где рабочая часть обозначена сплошной линией. Кривая 1 для двига телей нормального исполнения показывает, что асинхронный двигатель обладает жесткой характеристикой скорости, подобно двигателю постоянного тока параллельного возбуждения. Асинхронный двигатель с фазным ротором для регулирования скорости вращения, например для крановых и подъемных устройств, имеет более мягкую характеристику (кривая 2).
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
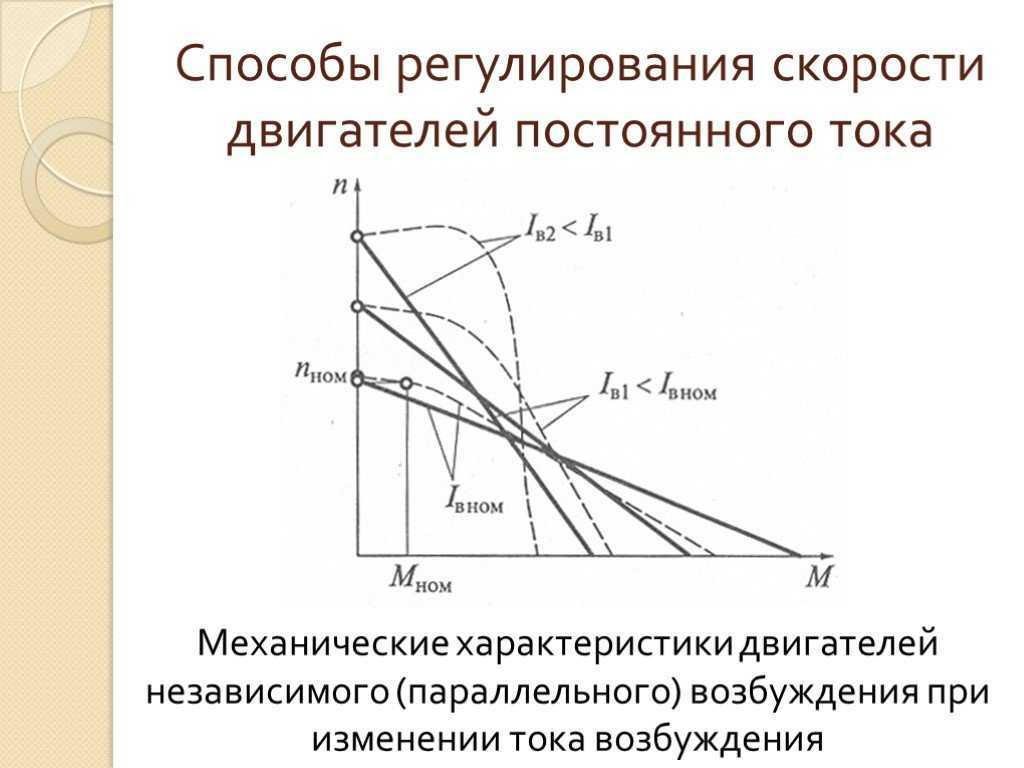
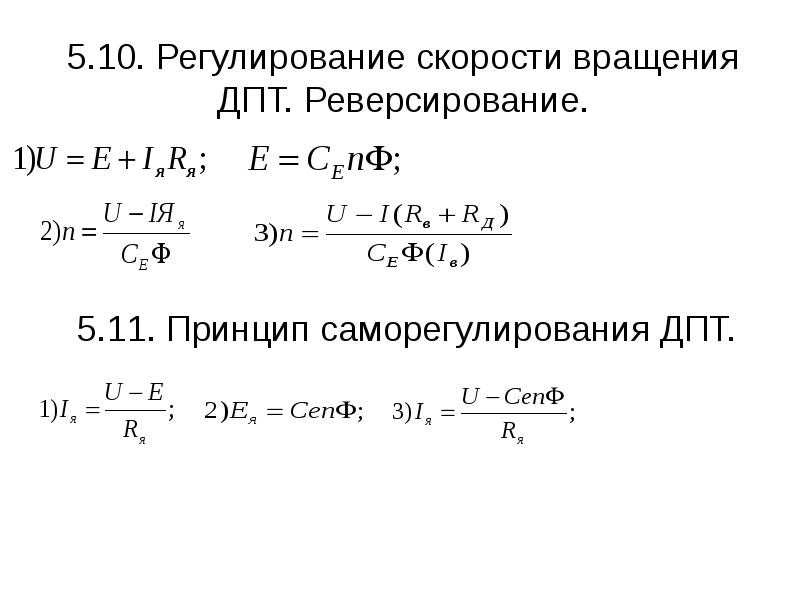
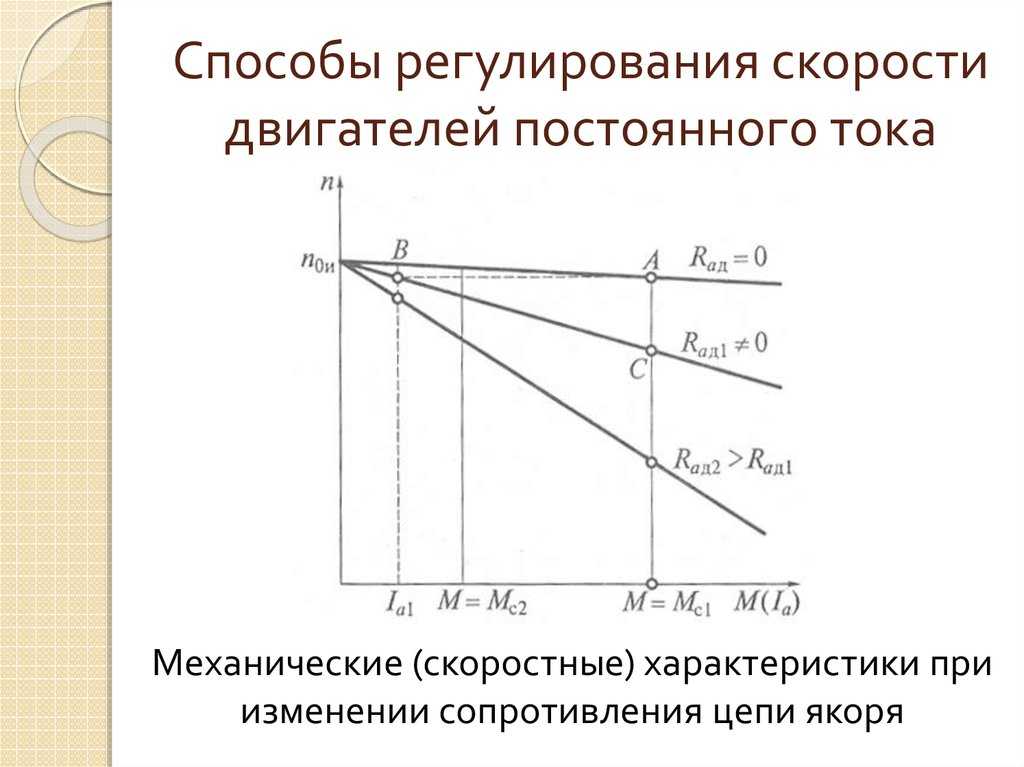
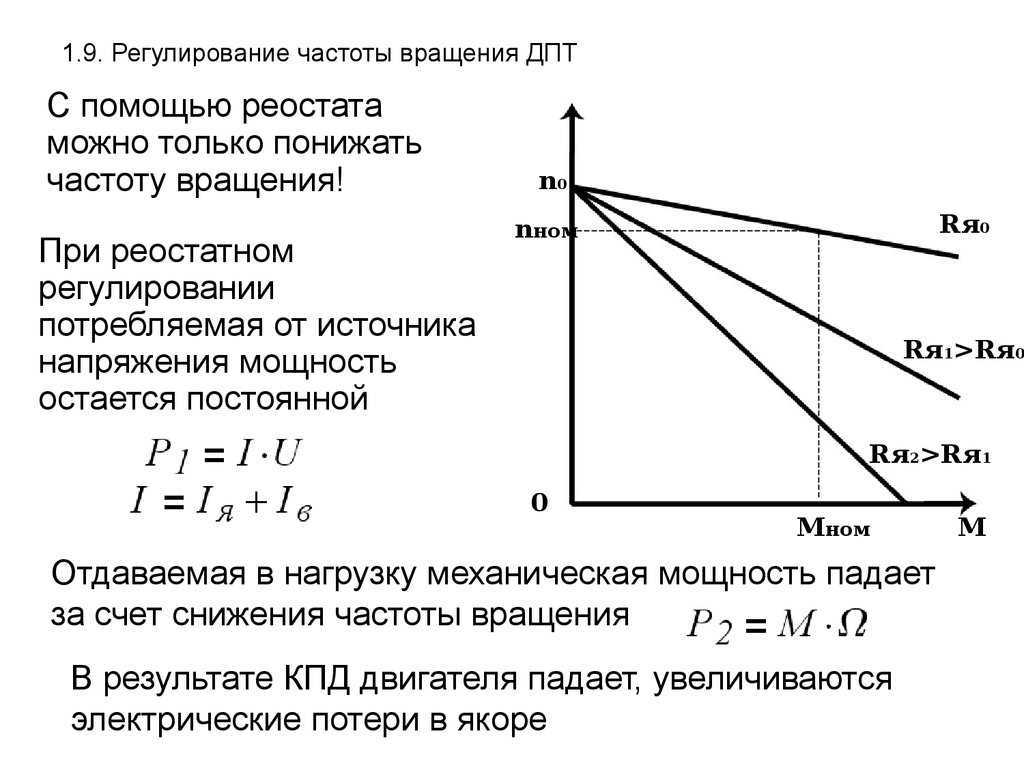
Механическая характеристика
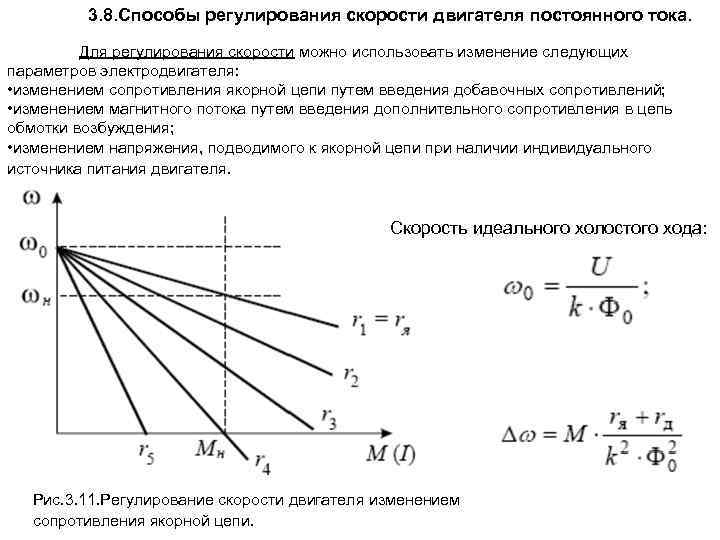
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
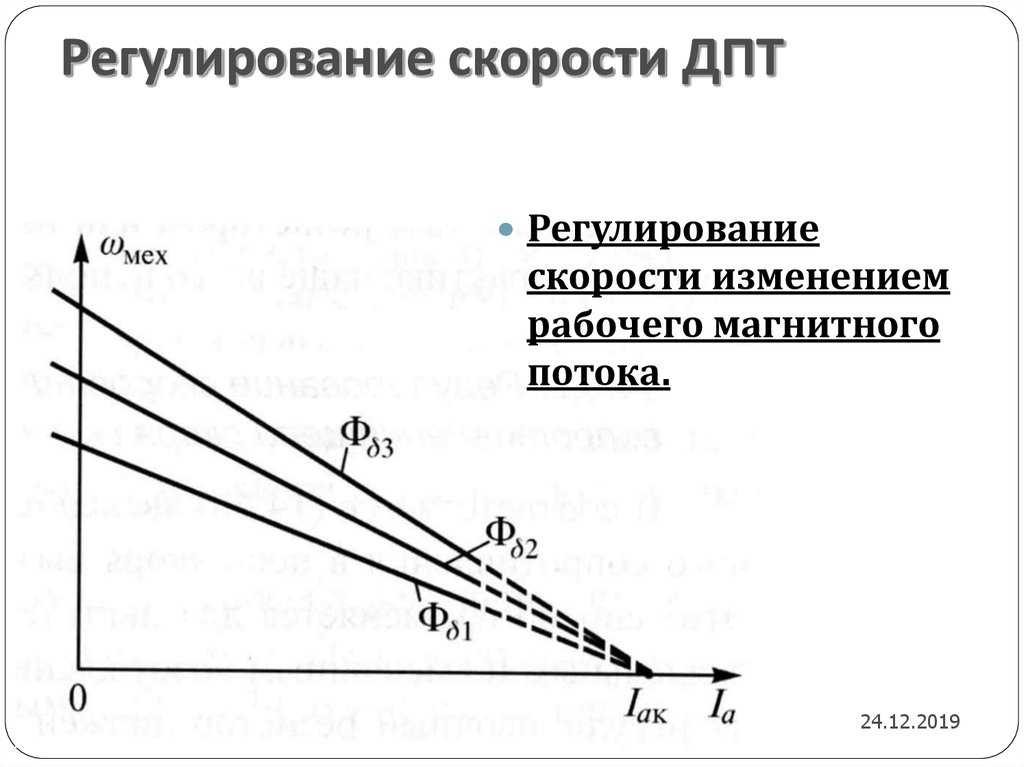
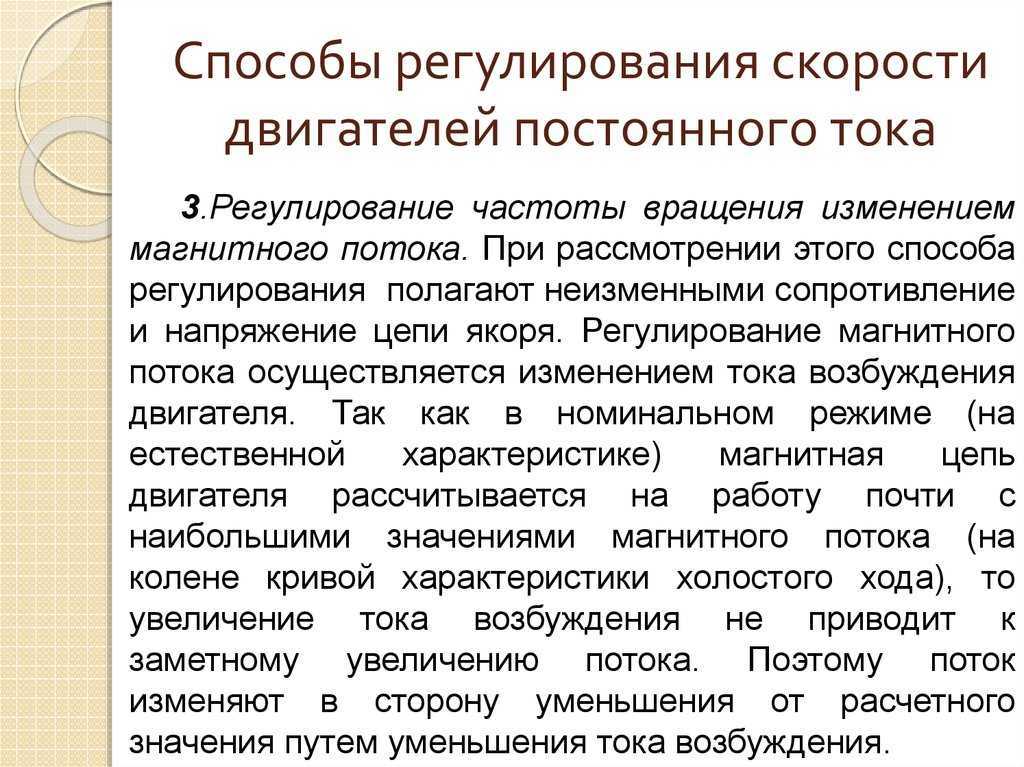
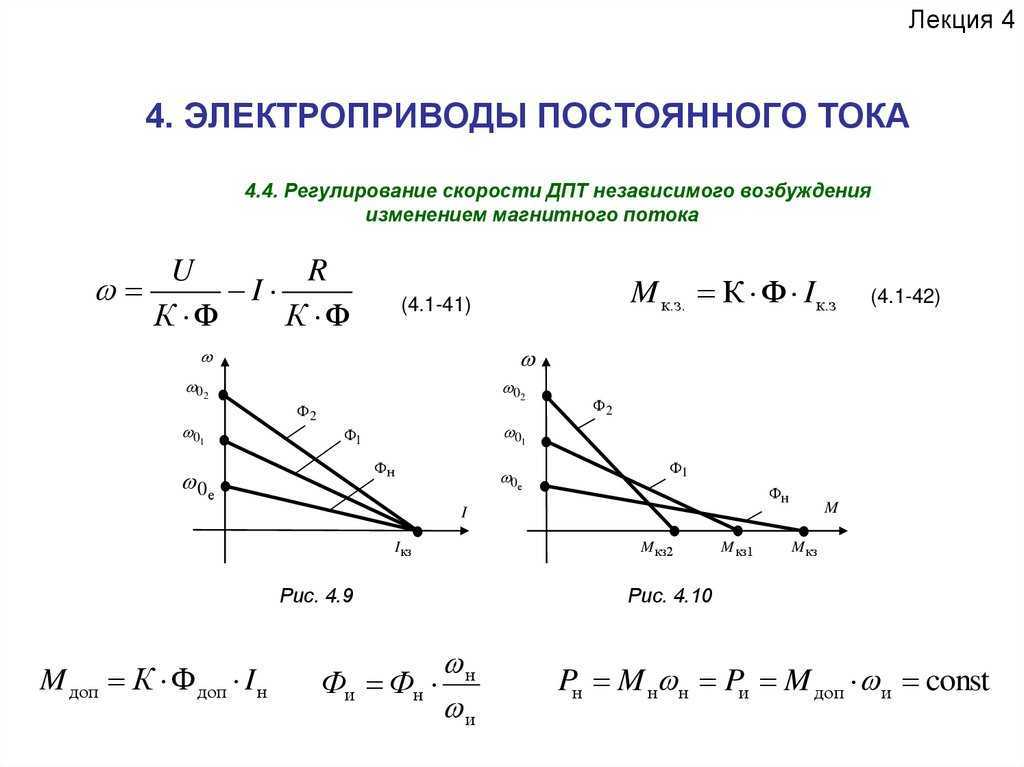
Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
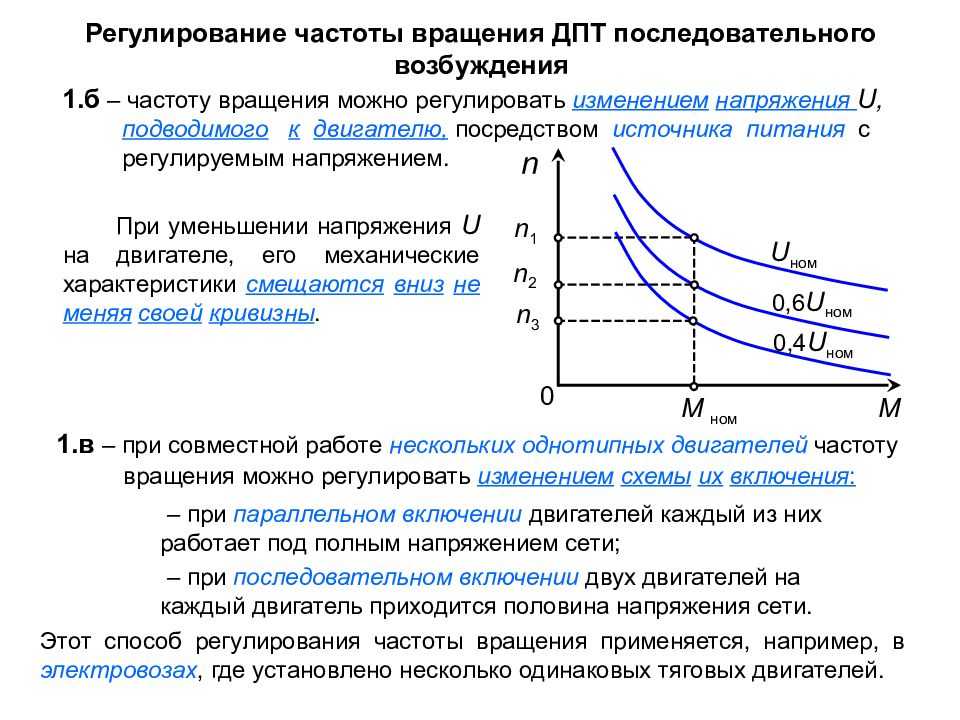
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения
В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения
Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
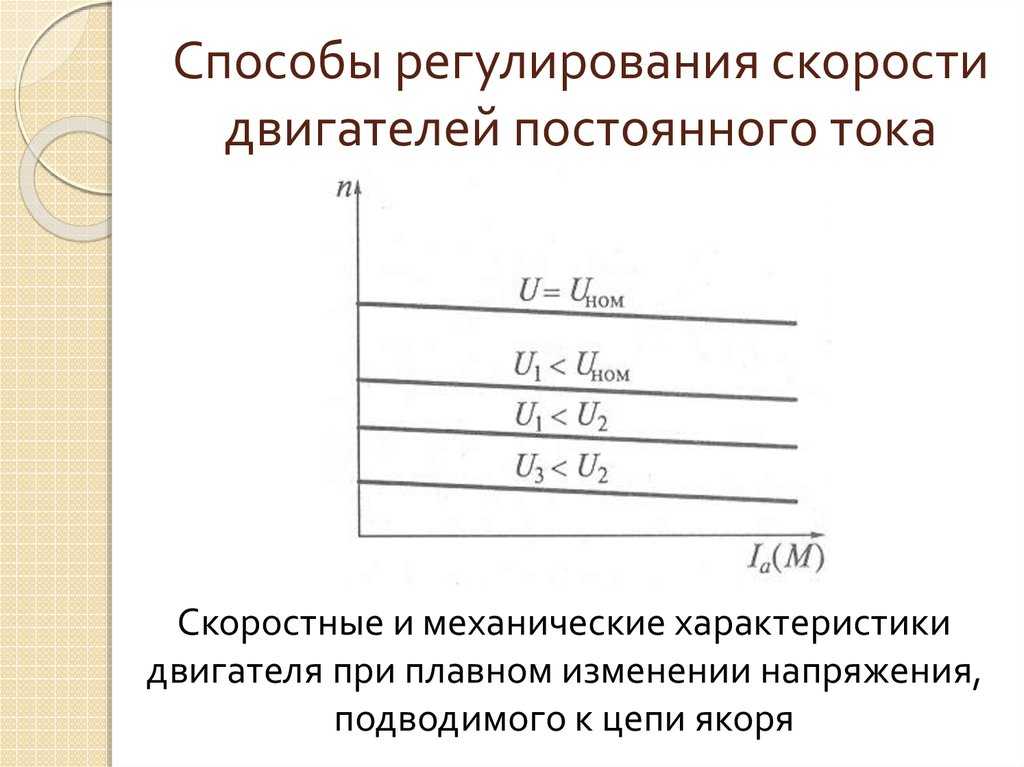
Схема регулятора
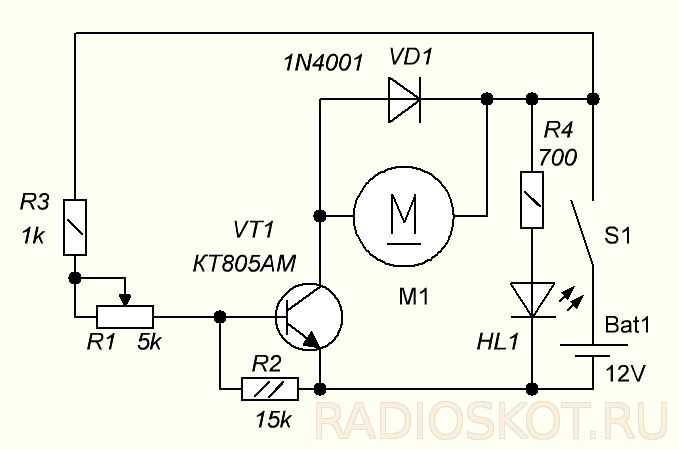
Схема очень простая и может быть легко собрана даже начинающими радиолюбителями. Из плюсов сборки этого устройства могу назвать его низкую себестоимость и возможность подогнать под нужные потребности. На рисунке приведена печатная плата регулятора:
Но область применения данного регулятора не ограничивается одними слайдерами, его легко можно применить в качестве регулятора оборотов, например бор машинки, самодельного дремеля, с питанием от 12 вольт, либо компьютерного кулера, например, размерами 80 х 80 или 120 х 120 мм. Также мною была разработана схема реверса двигателя, или говоря другими словами, быстрой смены вращения вала в другую сторону. Для этого использовал шестиконтактный тумблер на 2 положения. На следующем рисунке изображена схема его подключения:
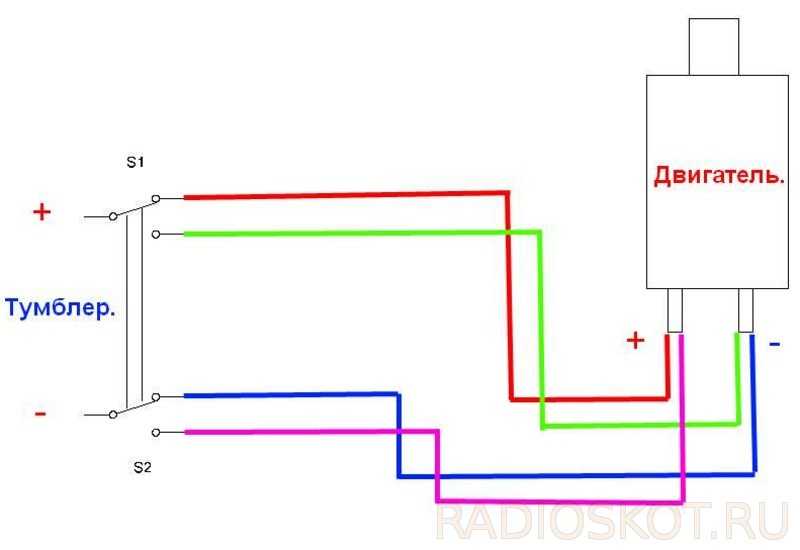
Средние контакты тумблера, обозначенные (+) и (-) подключают к контактам на плате обозначенным М1.1 и М1.2, полярность не имеет значения. Всем известно, что компьютерные кулеры, при снижении напряжения питания и, соответственно, оборотов, издают в работе намного меньший шум. На следующем фото, транзистор КТ805АМ на радиаторе:
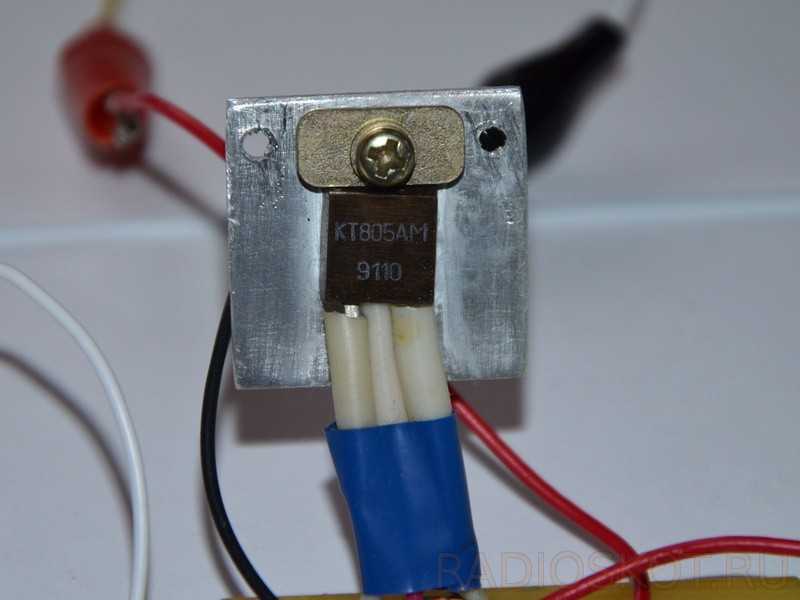
В схеме можно использовать почти любой транзистор средней и большой мощности n-p-n структуры. Диод также можно заменить на подходящие по току аналоги, например 1N4001, 1N4007 и другие. Выводы двигателя зашунтированы диодом в обратном включении, это было сделано для защиты транзистора в моменты включения — отключения схемы, так как двигатель у нас нагрузка индуктивная. Также, в схеме предусмотрена индикация включения слайдера на светодиоде, включенном последовательно с резистором.

При использовании двигателя большей мощности, чем изображен на фото, транзистор для улучшения охлаждения нужно прикрепить к радиатору. Фото получившейся платы приведено ниже:

Плата регулятора была изготовлена методом ЛУТ. Увидеть, что получилось в итоге, можно на видеоролике.
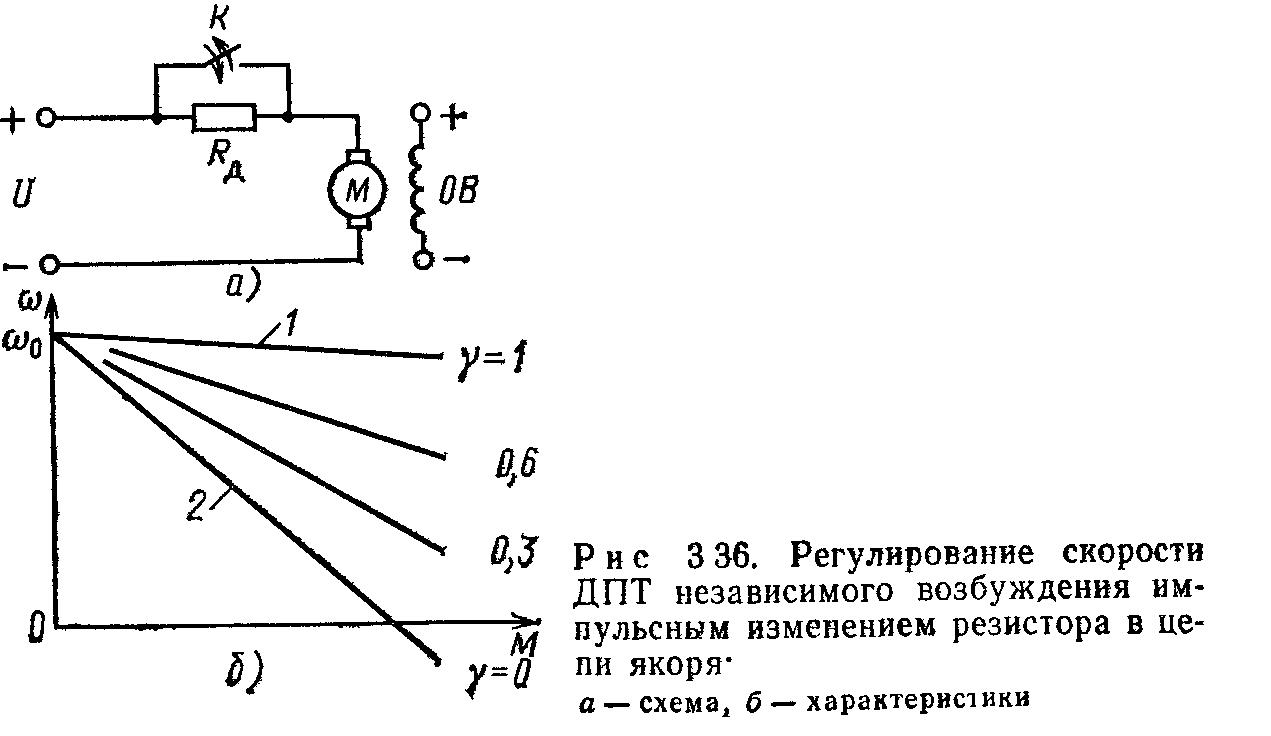
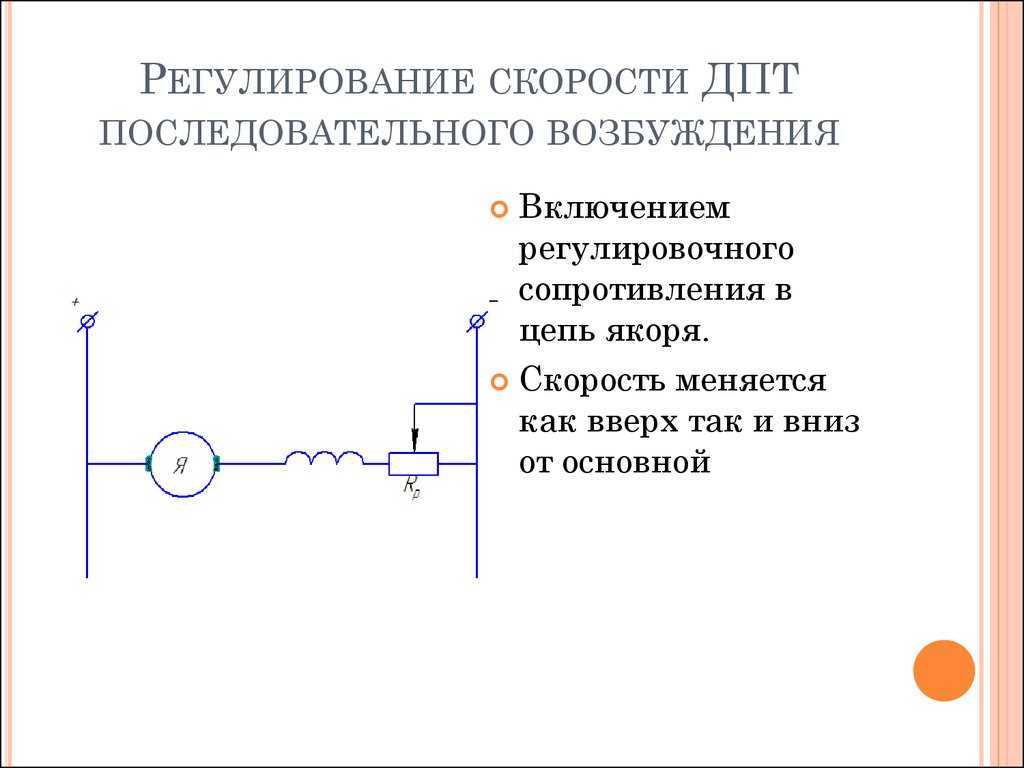
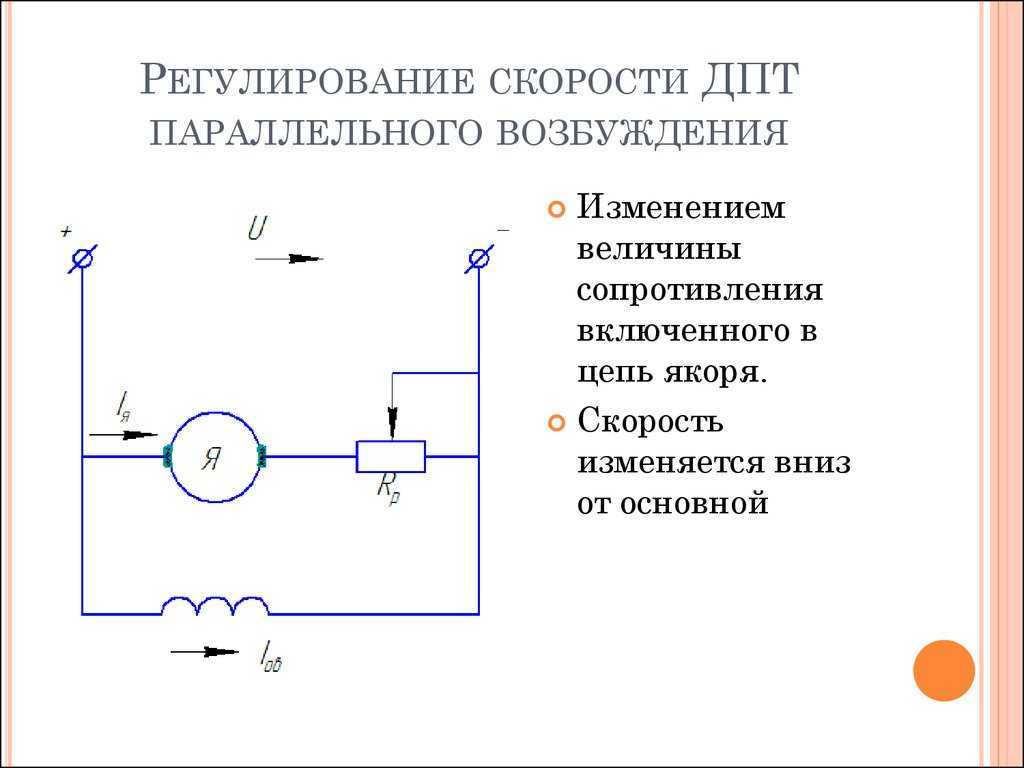
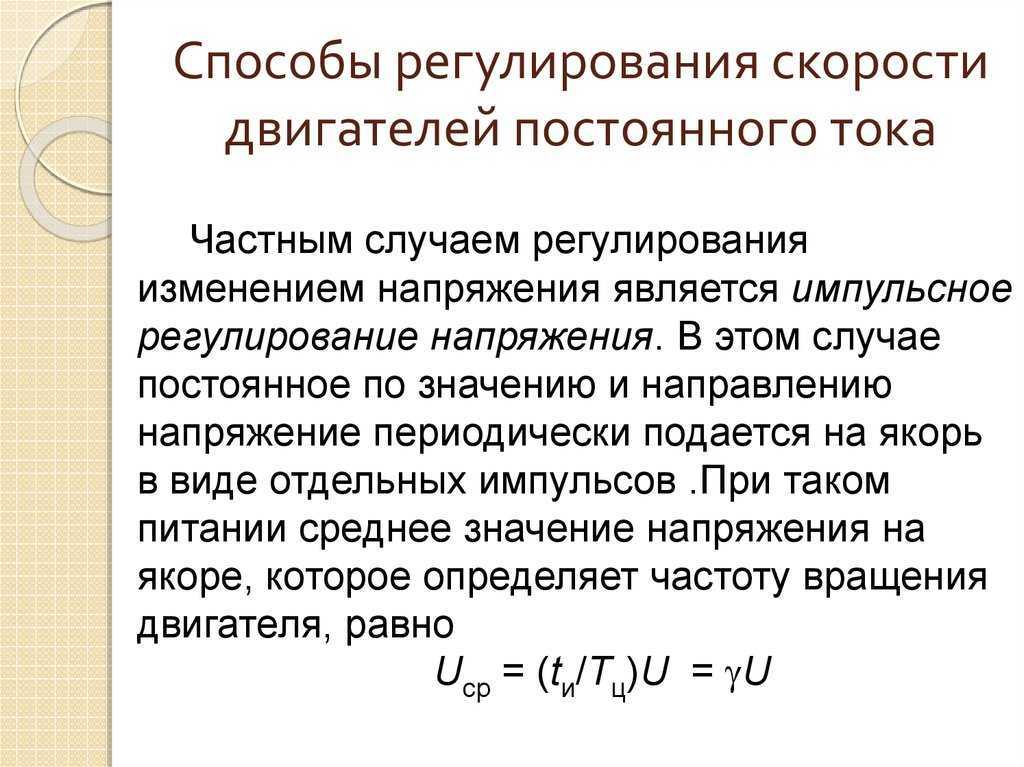
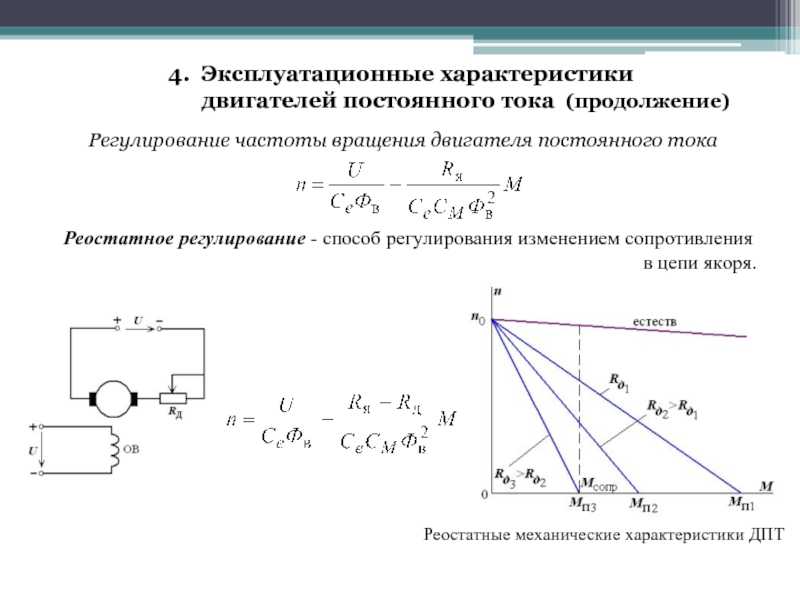
Импульсное регулирование частоты вращения ДПТ НВ
Сущность этого способа регулирования иллюстрируется схемой, изображенной на рис. 29.7, а. Цепь обмотки якоря двигателя параллельного (независимого) возбуждения периодически прерывается ключом К. Во время замыкания цепи якоря на время tк обмотке якоря подводится напряжение U = Uимпи ток в ней достигает значения Iamax. Затем ключом К цепь якоря размыкают и ток в ней убывает, достигая к моменту следующего замыкания цепи значения Iamin(при размыкании ключа К ток в обмотке якоря замыкается через диод VD). При следующем замыкании ключа К ток достигает значения Iamax и т. д. Таким образом, к обмотке якоря подводится некоторое среднее напряжение
, (29.13)
где Т— отрезок времени между двумя следующими друг за другом импульсами напряжения (рис. 29.7, б); — коэффициент управления.
При этом в обмотке якоря проходит ток, среднее значение которого  .
.
При импульсном регулировании частота вращения двигателя
. (29.14)
Таким образом, импульсное регулирование частоты вращения аналогично регулированию изменением подводимого к цепи якоря напряжения. С целью уменьшения пульсаций тока в цепи якоря включена катушка индуктивности (дроссель) , а частота подачи импульсов равна 200—400 Гц.


На рис. 29.7, в представлена одна из возможных схем импульсного регулирования, где в качестве ключа применен управляемый диод — тиристор VS. Открывается тиристор подачей кратковременного импульса от генератора импульсов (ГИ) на управляющий электрод (УЭ) тиристора. Цепь L1C,шунтирующая тиристор, служит для запирания последнего в период между двумя управляющими импульсами. Происходит это следующим образом: при открывании тиристора конденсатор С перезаряжается через контур L1Cи создает на силовых электродах тиристора напряжение, обратное напряжению сети, которое прекращает протекание тока через тиристор. Параметрами цепи L1Cопределяется время (с) открытого состояния тиристора: . Здесь L1выражается в генри (Гн); С — в фарадах (Ф).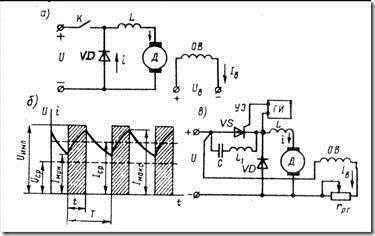
Рис. 29.7. Импульсное регулирование частоты вращения двигателя постоянного тока
Значение среднего напряжения Uср регулируется изменением частоты следования управляющих импульсов от генератора импульсов на тиристор VS.
Жесткие механические характеристики и возможность плавного регулирования частоты вращения в широком диапазоне определили области применения двигателей независимого возбуждения в станочных приводах, вентиляторах, а также во многих других случаях регулируемого электропривода, где требуется устойчивая работа при колебаниях нагрузки.
Свойства бесколлекторных приборов
Бесколлекторный двигатель постоянного тока (БДПТ) существенно отличается от вентильного двигателя. Его ток в фазах выглядит трапецеидально. БДПТ устроен более просто: широтно-импульсная модуляция заменена на коммутацию 120 или 180 градусов. Главными задачами безщеточного двигателя является точное положение ротора в необходимом промежутке и высокая скорость вращения.
Конструкция может быть двух видов: с магнитами на подвижной части (якоре) или неподвижной (статоре). В устройствах автоматики для охлаждения используются приводы с конструкцией магнитов на якоре. Характерной их особенностью является быстрое достижение высоких оборотов.
В системах оборудования для медицины распространено размещение магнитов на статоре. Эти микромашины называются высокомоментными двигателями. Скорость вращения у них не столь велика, но из-за отсутствия обмотки возбуждения и наличия постоянных магнитов они неплохо справляются с работой при перегрузках и сохраняют точность позиции в пространстве.
Сигнал на обмотки таких электромашин будет поступать от драйвера, задачей которого является управление вращающим моментом. Для того чтобы якорь повернулся на определённый угол, необходимо подать на нужные обмотки напряжение. Плавность вращения сохранить не удастся, но высокой скорости вращения добиться можно.
Разница между коллекторными и бесколлекторными двигателями состоит как в строении, так и в процессе работы. В контроллере коллекторные двигатели не нуждаются, а вот работа бесщеточного мотора без его участия недопустима. Достоинства бесщеточных двигателей:
- возможность работы в условиях с различными характеристиками окружающей среды;
- длительный срок использования;
- надёжность в работе.
Недостатком является стоимость. Она довольно высока из-за наличия в строении полупроводникового коммутатора, постоянного магнита и чувствительных элементов.
Собрать вентильный или ДПТ своими руками — дело неблагодарное. Материалы, сложность работы и потраченное время будут стоить гораздо дороже, нежели потраченные средства на покупку двигателя заводского изготовления. Но надёжность и безопасность тоже будут в несколько раз выше.
Подбор этих электромашин необходимо проводить, опираясь на характеристики драйверов с каналами широтно-импульсной модуляции:
- предельное напряжение при длительном использовании;
- максимальная скорость вращения;
- допустимая сила тока;
- частота тока (обыкновенные устройства 7—8 кГц, более усовершенствованные модели — 16—32 кГц).
https://youtube.com/watch?v=3lrsTMphAJs
Главными звеньями при управлении бесколлекторным двигателем являются датчики положения. Сигнал с них передаётся на контроллер, и вследствие этого происходят переключения. Но возможна работа этих устройств и без датчиков. В этом случае играет роль перепад напряжения на обмотке, которая в определённый момент является нерабочей.
По количеству фаз многие моторы являются трехфазными, и для управления ими необходим дополнительный узел в устройстве — выпрямитель постоянного тока в трехфазный импульсный. Управление трехфазным бесщеточным двигателем постоянного тока также вызывает некоторые сложности из-за параллельного контроля нескольких параметров. Поскольку электрические машины устройства обратимые, то бесколлекторный мотор можно подключить как генератор.
Требуемые компоненты
Самостоятельное подключение двигателя для реверсивного вращения не вызовет особых сложностей, если руководствоваться приведенной схемой. Одним из важных компонентов, который облегчит такую задачу является магнитный пускатель или контактор. На самом деле магнитный пускатель и контактор не являются тождественными понятиями. Если говорить просто, то контактор входит в состав магнитного пускателя, но для упрощения в статье оба понятия используются как равнозначные. Магнитные пускатели как раз и применяются для запуска, реверсивного движения и остановки асинхронных двигателей.

Возможно, возникает вопрос о том, почему нельзя использовать обычный рубильник или силовой автомат. В принципе, это допустимо, но не всегда пусковые токи, которые необходимы двигателю для нормального начала функционирования являются безопасными для человека. При включении может возникнуть пробой, который выведет из строя как выключатель, так и навредит оператору. Чтобы свести риски к минимуму, потребуется пускатель. В нем контактная часть отделена от той, с которой взаимодействует оператор. В нем есть отдельный модуль с катушкой, которая создает электромагнитное поле. Для работы катушки может потребоваться напряжение в 12 или больше вольт. При подаче этого напряжения происходит взаимодействие с металлическим сердечником, который втягивается внутрь катушки. К сердечнику закреплена пластина, которая уходит к контактной группе. Они замыкаются и происходит запуск двигателя. Остановка происходит в обратном порядке.
Кроме контактора, потребуется трехкнопочная станция. Одна клавиша выполняет функцию остановки, а две других функции запуска с разницей в направлении вращения. В трехкнопочной станции должно быть два нормально разомкнутых контакта и один нормально замкнутый. Если говорить просто, то нормальным положением контактора называется его нерабочее положение. То есть при воздействии на контакт он либо замыкается, либо размыкается. Если в рабочем состоянии он замкнут, то обозначается как НО, а если разомкнут, то обозначается как НЗ. Контакт НЗ применяется для кнопки остановки.