
Общие принципы работы серводвигателей (сервомоторов)
Серводвигатели включают в свой состав небольшой двигатель постоянного тока, редуктор и схему управления, содержащую переменный резистор, дающий возможность установить выходной вал серводвигателя под определенным углом. Поэтому серводвигатели очень удобны для проектов, где требуется осуществлять весьма быстрое и относительно точное перемещение какого-либо рабочего органа.
Типы серводвигателей
Серводвигатели часто используются в радиоуправляемых моделях автомобилей для поворота рулевых колес или в моделях радиоуправляемых самолетов – для поворота управляющих поверхностей (рулей). На следующем рисунке показаны два серводвигателя разных размеров.

Серводвигатель справа представляет собой так называемый стандартный серводвигатель. Это наиболее распространенный тип серводвигателя. Такие серводвигатели достаточно часто имеют одинаковые размеры и монтажные расстояния между отверстиями. Намного меньший (и более легкий) серводвигатель слева предназначен для летательных аппаратов. Эти серводвигатели называются сервоприводами 9g .
Сервоприводы с более высоким качеством исполнения и более высоким крутящим моментом имеют редуктор с шестернями из металла, а не из нейлона. Большинство серводвигателей работают на номинальном напряжении питания около 5 В при допустимом диапазоне питающих напряжений от 4 до 7 В. Подключение любительских сервоприводов обычно осуществляется через провода, заканчивающиеся 3-контактным разъемом: питание +, питание — и управляющий сигнал.
Большие и иногда весьма мощные серводвигатели также доступны для использования, но они не так стандартизированы, как любительские маломощные сервомашинки.
Устройство сервопривода
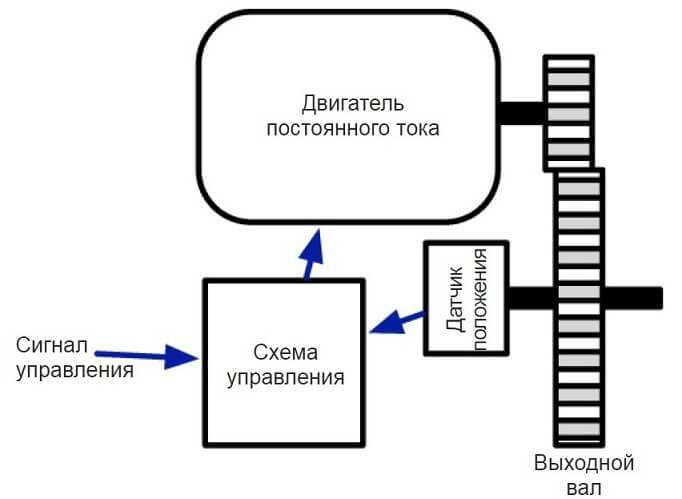
Сервопривод (см. рисунок) состоит из электродвигателя, постоянного тока, приводящего в действие редуктор, уменьшающий скорость вращения двигателя и, в то же время увеличивающий крутящий момент на валу. Для контроля положения выходного вала он соединен с датчиком положения (как правило, это переменный резистор). Для управления мощностью и направлением, в котором поворачивается двигатель сервопривода, схема управления использует входной сигнал от датчика положения в сочетании с сигналом управления, задающим требуемое положение.

Блок управления, получив через сигнал управления величину желаемого положения вала, вычитает из него величину действительного его положения и вырабатывает «сигнал ошибки», который может быть положительным или отрицательным. Этот «сигнал ошибки» подается на питание двигателя, заставляя его изменить положение вала в нужном направлении. Чем больше разница между желаемым и действительным положением выходного вала, тем быстрее двигатель будет поворачиваться к желаемой позиции. Чем ближе к нулю становится значение ошибки (рассогласования), тем меньше становится питание двигателя.
Управление серводвигателем
Управляющий сигнал на серводвигатель — это не напряжение, как можно было бы ожидать, а сигнал широтно-импульсной модуляции (ШИМ). Этот сигнал является стандартным для всех любительских сервомашинок и выглядит так, как показано на следующем рисунке.

Серводвигатель ожидает прихода импульса управления каждые 20 мс. Импульс длительностью 1,5 мс установит серводвигатель в центральное положение, соответствующее повороту выходного вала на 90°. Более короткие импульсы в 1,0 мс установят выходной вал в начальное положение — 0°, а импульсы в 2,0 мс — крайнее положение — 180°. В реальности этот диапазон может быть немного меньше, чем полные 180°, без укорочения импульсов на одном конце и удлинения на другом. Не редкость и ситуация, когда для 0° нужен импульс 0,5 мс, а для 180° — 2,5 мс.
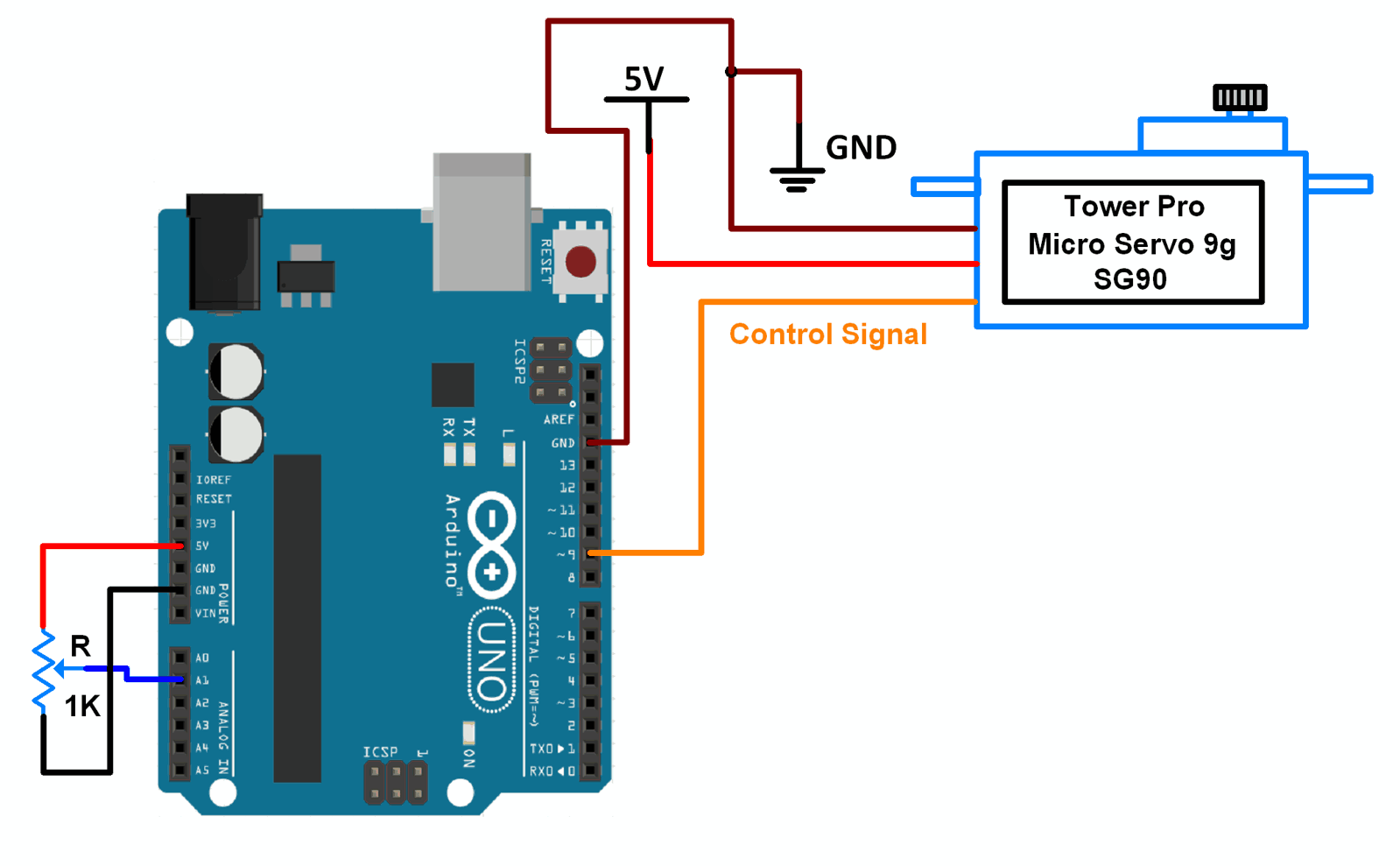
Назначение контактов сервомотора
Представлено на следующем рисунке. Я думаю, здесь все просто и понятно.

1. Red (красный) = Положительное напряжение питания (от 4.8V до 6V)
2. Brown (коричневый) = Ground (земля)
3. Orange (оранжевый) = Control Signal – управляющий сигнал (PWM Pin – контакт ШИМ)
Метод writeMicroseconds
Помимо управления положением сервопривода, вы также можете использовать Arduino для управления скоростью, с которой сервопривод перемещается в новое положение. Это можно сделать, используя метод «writeMicroseconds» вместо метода «write». Метод writeMicroseconds принимает один аргумент — количество микросекунд, в течение которых сервопривод должен находиться во включенном состоянии. Регулируя количество микросекунд, вы можете контролировать скорость, с которой движется сервопривод.
Также стоит отметить, что серводвигатель имеет ограниченный диапазон движения, обычно от 0 до 180 градусов. Итак, вам нужно убедиться, что положение сервопривода находится в пределах этого диапазона при использовании метода «запись». Если вы попытаетесь установить положение за пределами этого диапазона, сервопривод может не двигаться или даже повредиться.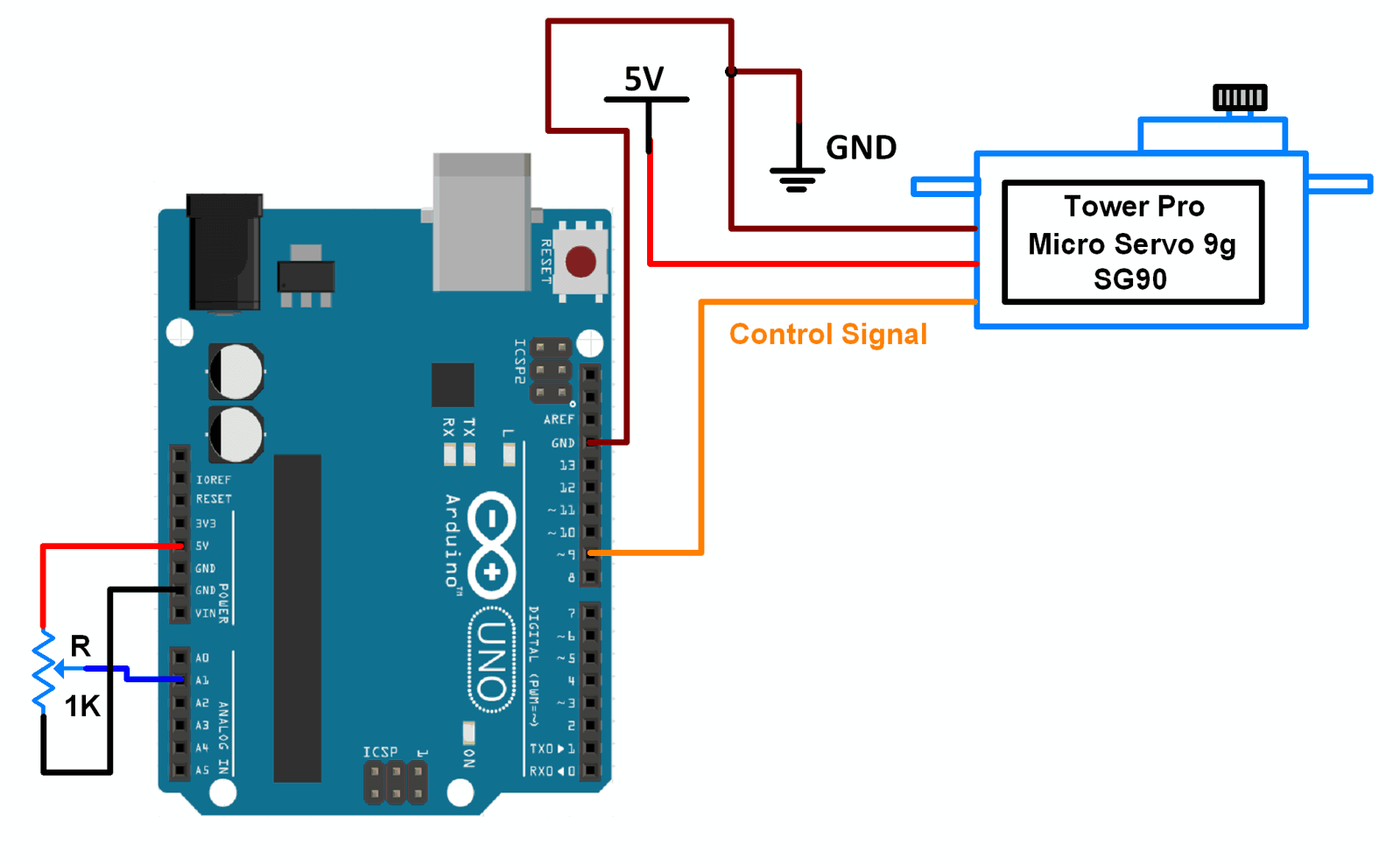
Еще одним важным аспектом, который следует учитывать при подключении сервопривода к Arduino, является энергопотребление. Серводвигатели могут потреблять значительное количество энергии, особенно во время движения
Поэтому важно убедиться, что источник питания может обеспечить достаточную мощность для сервопривода и платы Arduino, особенно при использовании нескольких сервоприводов
Наконец, всегда полезно протестировать сервопривод и соединение Arduino, прежде чем использовать его в окончательном проекте. Вы можете использовать встроенный в Arduino IDE «Последовательный монитор» для отправки команд сервоприводу и просмотра результатов в режиме реального времени. Это позволит вам убедиться, что сервопривод работает правильно и что Arduino отправляет правильные команды.
Переделка сервопривода в серво непрерывного вращения
Как описывалось выше, сервопривод управляется импульсами переменной ширины, которые задают угол поворота. Текущее положение считывается с потенциометра. Если рассоединить вал и потенциометр, серводвигатель будет принимать положение движка потенциометра как в средней точке. Все эти действия приведут к тому, что будет убрана обратная связь. Это позволяет управлять скоростью и направлением вращения по сигнальному проводу, и создать серво непрерывного вращения
При этом важно отметить, что серво постоянного вращения не может поворачиваться на определенный угол и делать строго заданное количество оборотов
Чтобы произвести вышеописанные действия, придется разобрать устройство и внести изменения в конструкцию.
В Ардуино IDE нужно создать небольшой скетч, который поставит качалку в среднее положение.
#include Servo myservo; void setup(){ myservo.attach(9); myservo.write(90); } void loop(){ }
После этого устройство нужно подключить к Ардуино. При подключении серво начнет вращаться. Нужно добиться ее полной остановки путем регулирования резистора. После того, как вращение прекратится, нужно найти вал, вытащить из него гибкий элемент и установить обратно.
Этот метод имеет несколько недостатков – настройка резистора до полной остановки неустойчива, при малейшем ударе/нагреве/охлаждении настроенная нулевая точка может сбиться. Поэтому лучше использовать способ замены потенциометра подстроечником. Для этого нужно вытащить потенциометр и заменить его на подстроечный резистор с таким же сопротивлением. Нулевую точку нужно настроить калибровочным скетчем.




Любой из методов переделки сервопривода в серво непрерывного вращения имеет свои недостатки. Во-первых, сложно настроить нулевую точку, любое движение может ее сбить. Во-вторых, диапазон регулирования мал – при небольшом изменении ширины импульса скорость может значительно измениться. Расширить диапазон можно программно в Ардуино.
Объяснение кода программы
Полный код программы приведен в конце статьи, здесь же мы кратко рассмотрим его основные фрагменты.
Прежде чем приступать к написанию программы вам необходимо скачать библиотеку esp32 servo motor и установить ее в Arduino IDE.
Первым делом в коде программы подключим библиотеку Servo.h и создадим объект для работы с сервомотором. Затем объявим переменную pos, в которой будем хранить информацию о положении оси сервомотора.
Arduino
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0;
|
1 |
#include <Servo.h> Servomyservo;// create servo object to control a servo // twelve servo objects can be created on most boards intpos=; |
В функции setup() мы с помощью метода attach «прикрепим» сервомотор к контакту 26 модуля ESP32.
Arduino
void setup() {
myservo.attach(26); // attaches the servo on pin 13 to the servo object
}
|
1 |
voidsetup(){ myservo.attach(26);// attaches the servo on pin 13 to the servo object } |
В функции void loop() мы запрограммируем два цикла, в одном из которых мы будем поворачивать ось сервомотора от 0 до 180 градусов, а в другом – от 180 градусов до 0. Этот процесс будет продолжаться бесконечно до тех пор пока на наш проект подается питание.
Arduino
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable ‘pos’
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable ‘pos’
delay(15); // waits 15ms for the servo to reach the position
}
}
|
1 |
voidloop(){ for(pos=;pos<=180;pos+=1){// goes from 0 degrees to 180 degrees // in steps of 1 degree myservo.write(pos);// tell servo to go to position in variable ‘pos’ delay(15);// waits 15ms for the servo to reach the position } for(pos=180;pos>=;pos-=1){// goes from 180 degrees to 0 degrees myservo.write(pos);// tell servo to go to position in variable ‘pos’ delay(15);// waits 15ms for the servo to reach the position } } |
Сервоприводные модификации для упаковочных станков
Модель данного типа чаще всего работает от движения пневмоцилиндров. При этом блоки питания часто используются на 12 В. В данном случае системы защиты устанавливаются довольно часто. Конвертеры можно встретить на два и три контакта. Статорные коробки устанавливаются различной конфигурации. В некоторых случаях датчики обратной связи в сервоприводах заменяются энкодерами. Роторные коробки на предельное напряжение должны быть рассчитаны в районе 12 В. Резистивные механизмы в устройствах встречаются довольно редко.
Самостоятельно собрать сервопривод данного типа можно. С этой целью лучше всего подобрать аналоговый потенциометр. При этом конвертер лучше использовать на два контакта. Вместо энкодера многие специалисты рекомендуют применять датчики обратной связи. Однако для их успешной эксплуатации необходимо проверить устройство на чувствительность. Регулятор проще всего использовать поворотного типа из пластика. Модуляторы применяются только одноканальные.
Рассмотрим на этом занятии устройство и принцип работы сервоприводов. Разберем два простых скетча для управления сервоприводом с помощью потенциометра на Ардуино. Также мы узнаем новые команды в языке программирования C++ — servo.write
, servo.read
, servo.attach
и научимся подключать в скетчах библиотеку для управления сервоприводами и другими устройствами через Ардуино.
Описание [ править | править код ]
Устройство сервомотора (servo)
Сервопривод (сервомотор) является важным элементом при конструировании различных роботов и механизмов. Это точный исполнитель, который имеет обратную связь, позволяющую точно управлять движениями механизмов. Другими словами, получая на входе значение управляющего сигнала, сервомотор стремится поддерживать это значение на выходе своего исполнительного элемента.
Сервоприводы широко используются для моделирования механических движений роботов. Сервопривод состоит из датчика (скорости, положения и т.п.), блока управления приводом из механической системы и электронной схемы. Редукторы (шестерни) устройства выполняют из металла, карбона или пластика. Пластиковые шестерни сервомотора не выдерживают сильные нагрузки и удары.
Сервомотор имеет встроенный потенциометр, который соединен с выходным валом. Поворотом вала, сервопривод меняет значение напряжения на потенциометре. Плата анализирует напряжение входного сигнала и сравнивает его с напряжением на потенциометре, исходя из полученной разницы, мотор будет вращаться до тех пор пока не выравняет напряжение на выходе и на потенциометре.
Электрический сервопривод для отопления
Примеры работы с Arduino
Схема подключения
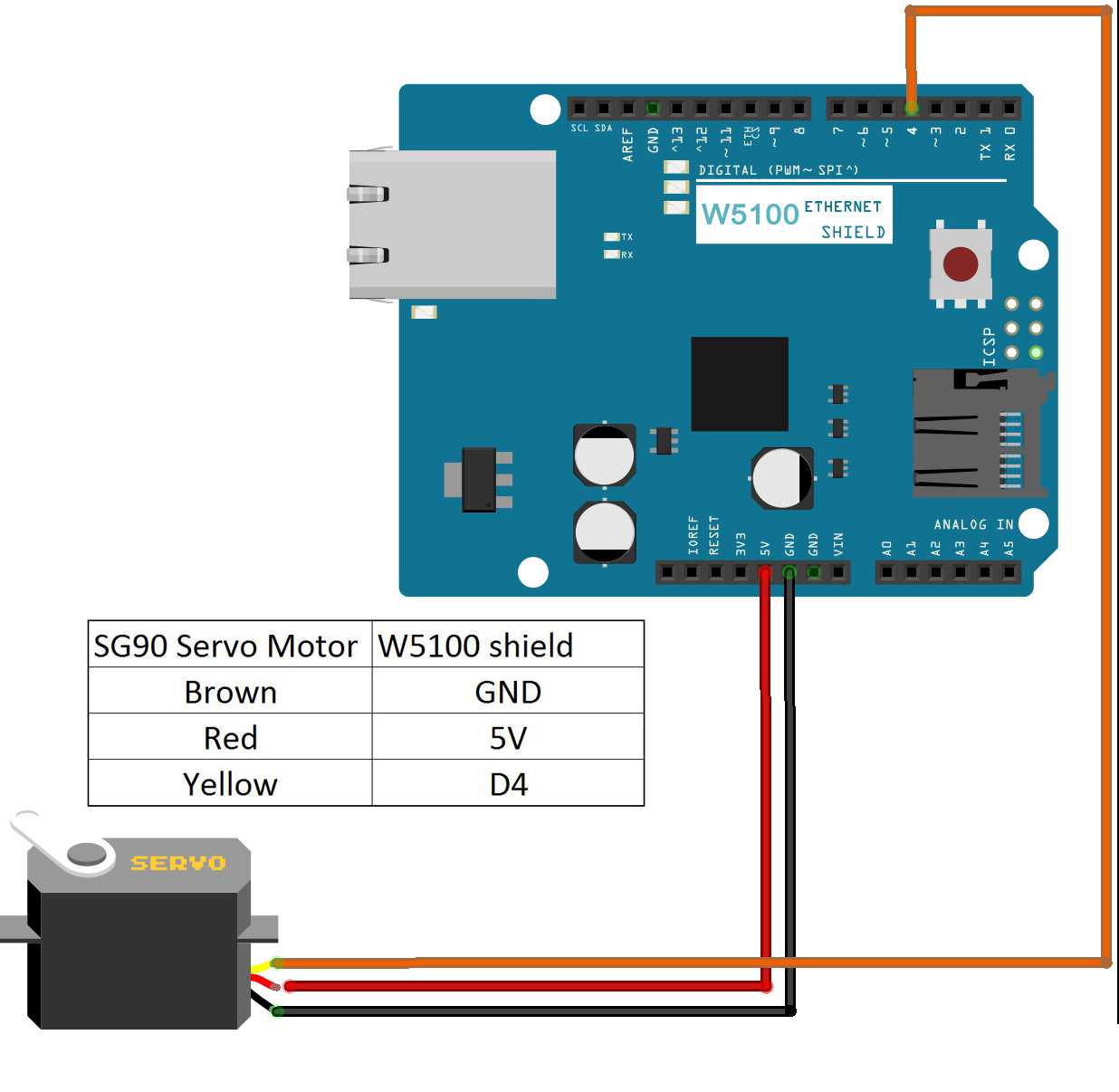
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
-
красный — питание; подключается к контакту 5V или напрямую к источнику питания
-
коричневый или чёрный — земля
-
жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
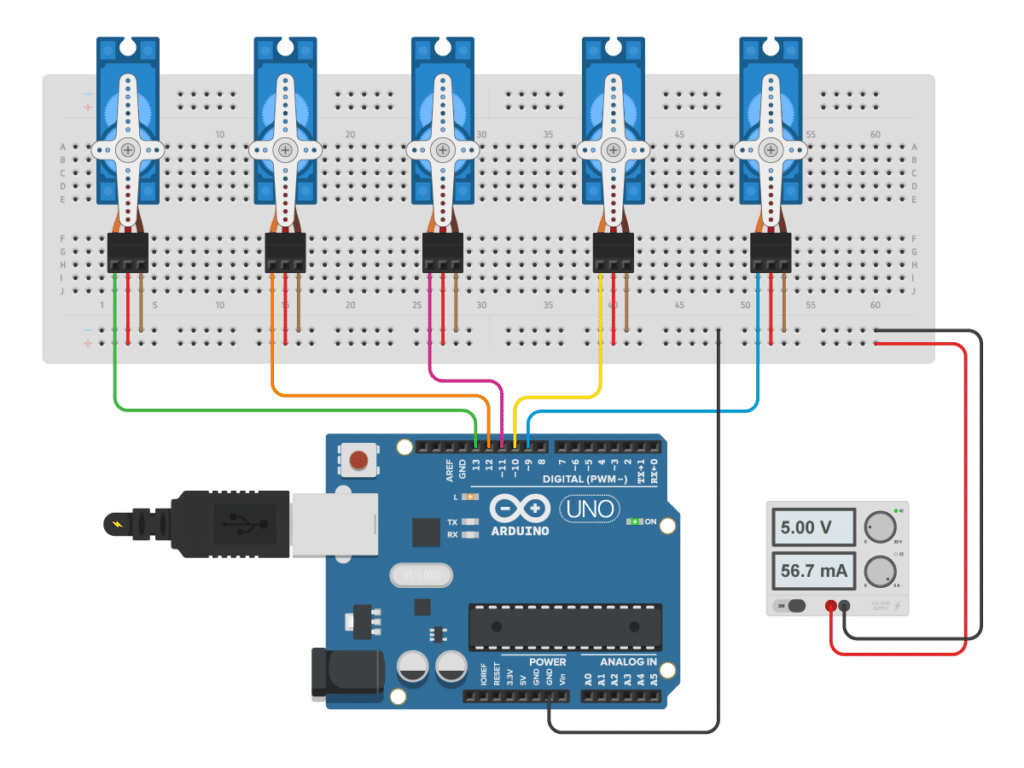
Рассмотрим на примере подключения 12V сервопривода:

Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Пример использования библиотеки Servo
servo_example.ino// подключаем библиотеку для работы с сервоприводами#include <Servo.h> // создаём объект для управления сервоприводомServo myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9);} void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500);}
По аналогии подключим 2 сервопривода
2servo_example.ino// подключаем библиотеку для работы с сервоприводами#include <Servo.h> // создаём объекты для управления сервоприводамиServo myservo1;Servo myservo2; void setup() { // подключаем сервоприводы к 11 и 12 пину myservo1.attach(11); myservo2.attach(12);} void loop() { // устанавливаем сервопривод в серединное положение myservo1.write(90); myservo2.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo1.write(); myservo2.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo1.write(180); myservo2.write(180); delay(500);}

![Сервоприводы pdm постоянного вращения: особенности применения и примеры кода [амперка / вики]](https://magazinzing.ru/wp-content/uploads/e/9/7/e975b89397e81b46f02d493e7e258afb.png)



Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками / передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
servo2_example.ino// подключаем библиотеку для работы с сервоприводами// данная библиотека совместима с библиотекой «VirtualWire»// для работы с приёмником и передатчиком на 433 МГц#include <Servo2.h> // создаём объект для управления сервоприводомServo2 myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9);} void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500);}
Занимательная электроника. Ревич Ю.
Аннотация
Третье и четвертое издания популярной книги дополнены сведениями о микроконтроллере Ардуино. Помимо этого на практических примерах рассказано, как нужно настраивать и создавать электронные проекты своими руками. Есть физические основы электроники, принципы работы электронных устройств, описание необходимых компонентов, советы по оборудованию домашней лаборатории. Автор дает различные рекомендации по правильной организации электропитания до получения данных об устройствах.
Приводятся конкретные аналоговые и цифровые схемы с их подробным описанием. Описание работы на Ардуино поясняется примером создания домашней метеостанции с пошаговой инструкцией.
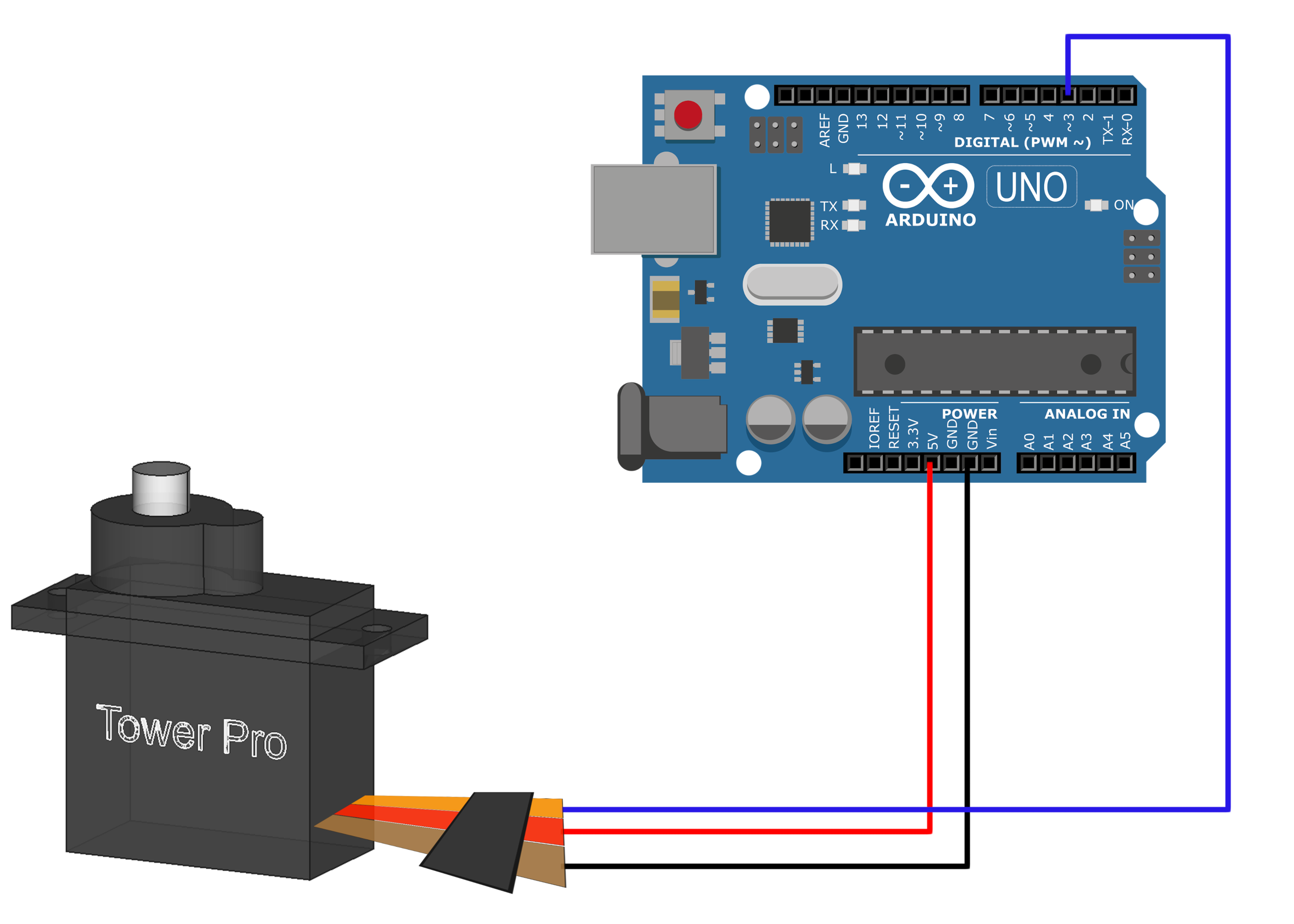
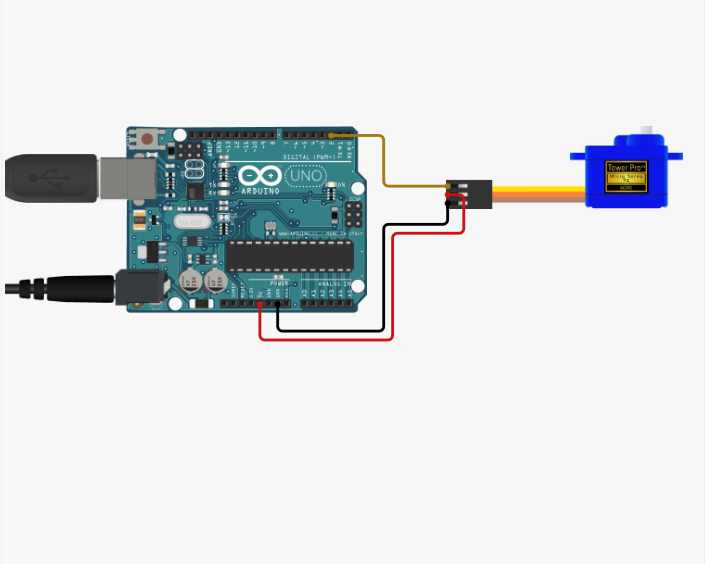
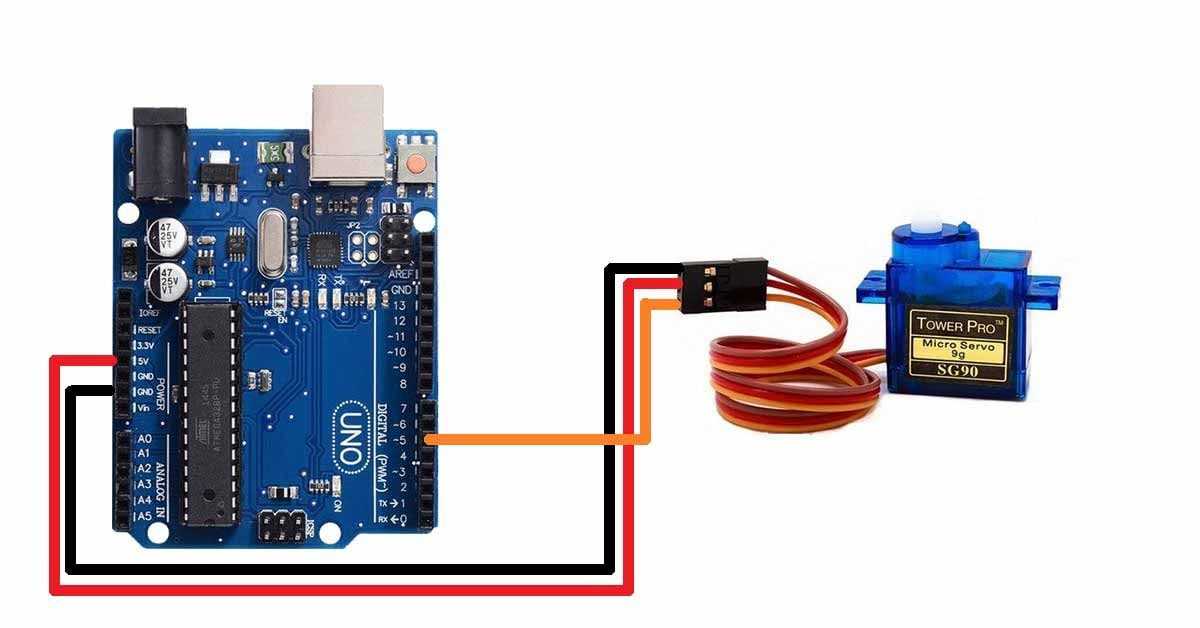
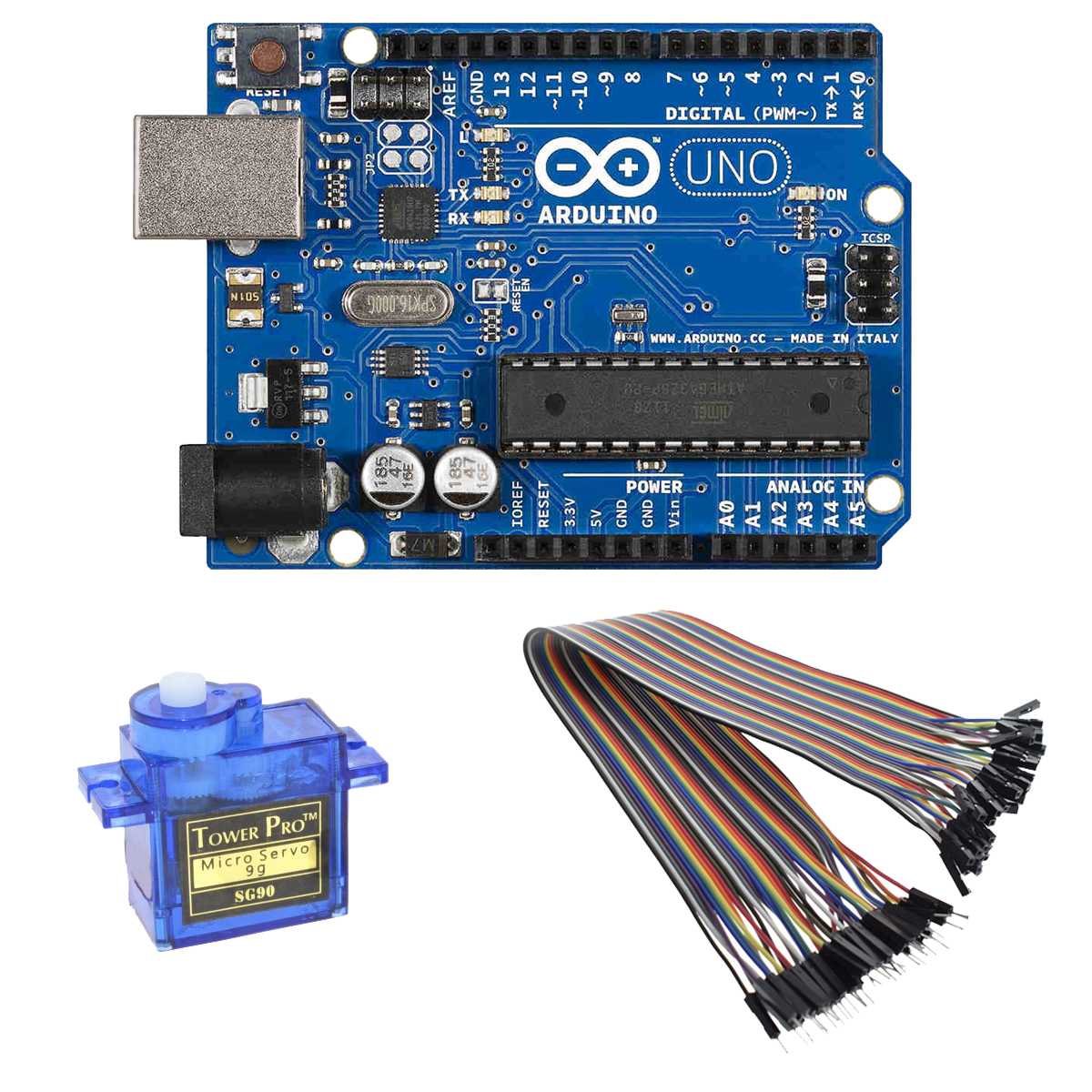
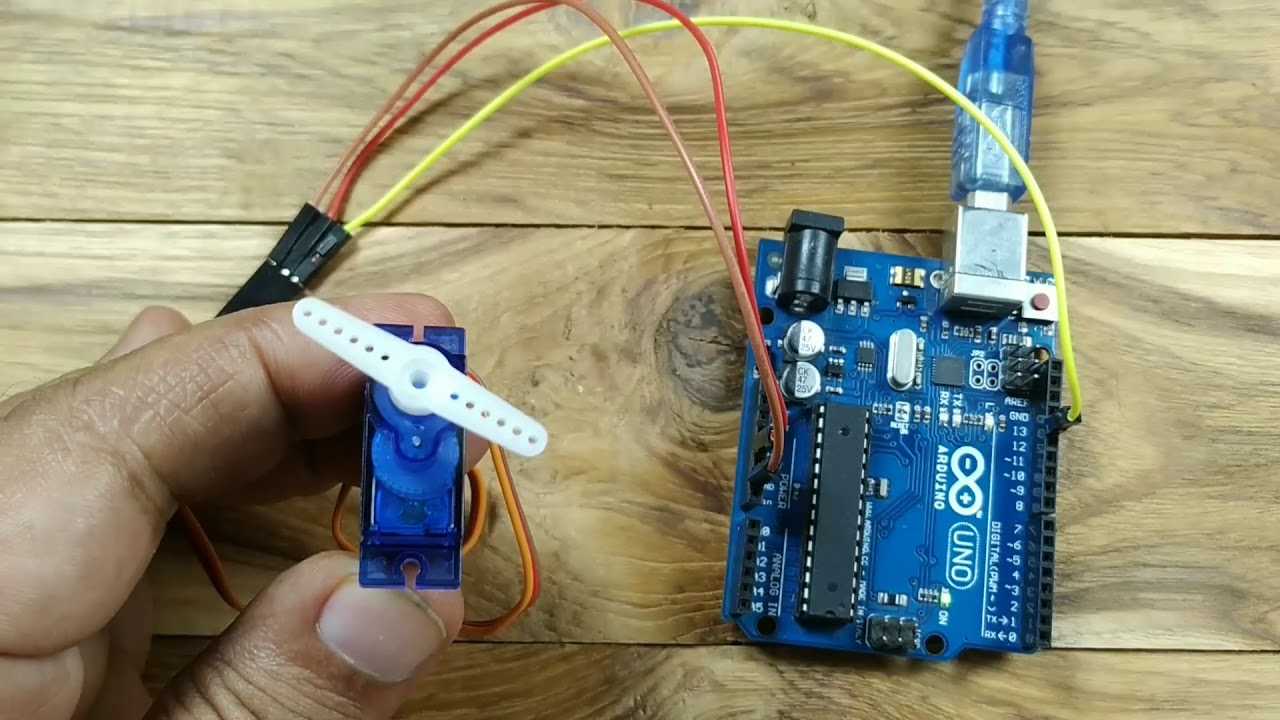
Сервопривод SG90. Подключение к arduino

Сервопривод SG90 имеет три провода. Красный – это плюсовой провод, рабочее напряжение от 3 до 7 вольт, поэтому 5 вольт от ардуино подходит идеально. Коричневый провод – это земля. И последний, желтый – это управляющий провод, который нужно подключать к цифровому пину ардуино, в примере будем использовать пин 9.
Для работы с сервоприводами в IDE ардуино уже есть по умолчанию библиотека Servo.h, которую нужно подключать в начале скетча.Замечание: сервопривод SG90 имеет возможность поворачиваться только на 180 градусов.
Ниже приведен пример кода, который поворачивает сервопривод на 90 градусов.
#include <Servo.h> // подключение библиотеки
Servo test_servo; // создание объекта для сервы
void setup() {
test_servo.attach(9); // указываем управляющий пин
delay(100);
test_servo.write(90); // делаем поворот на 90 градусов
}
void loop() {}
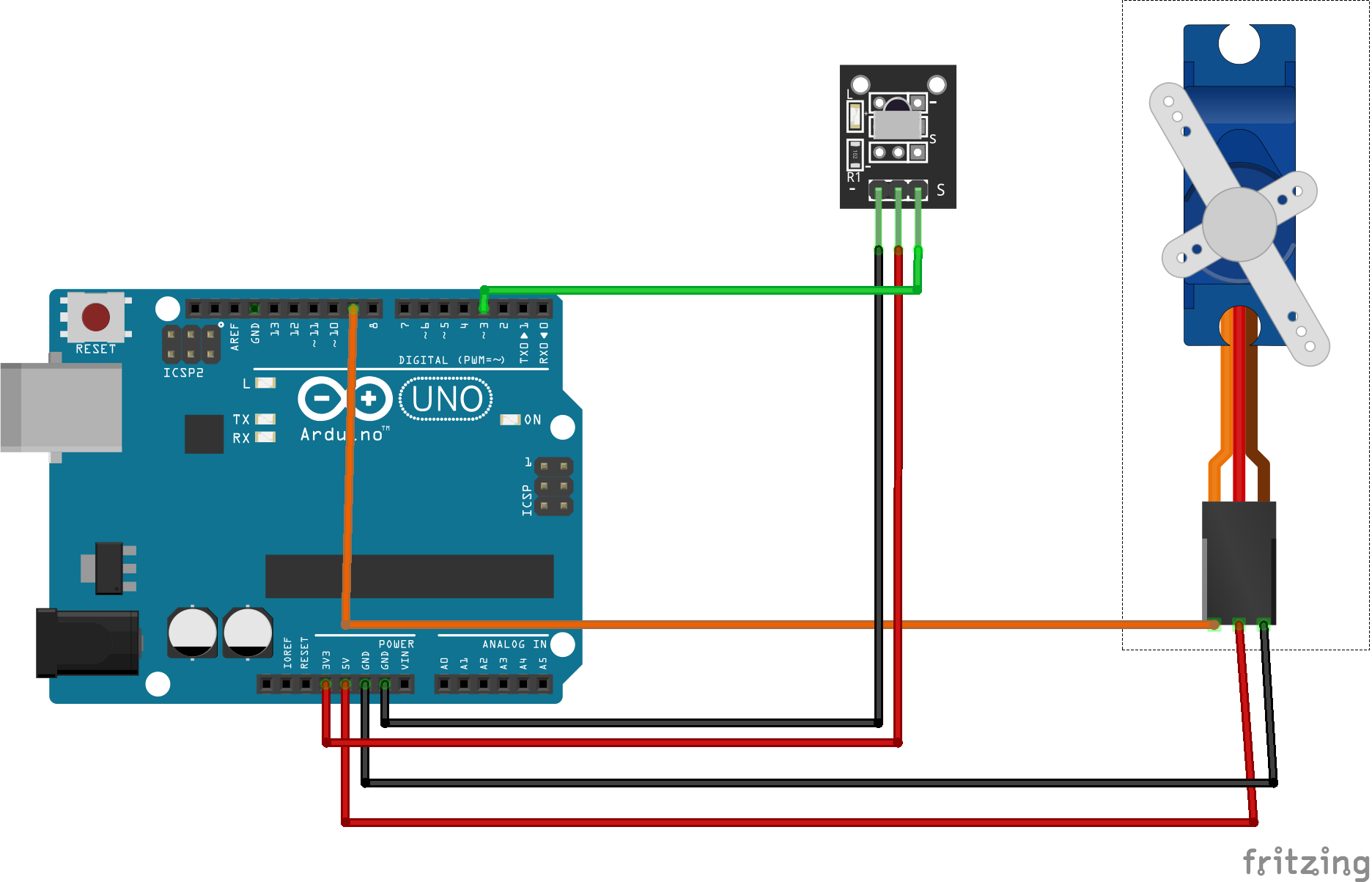
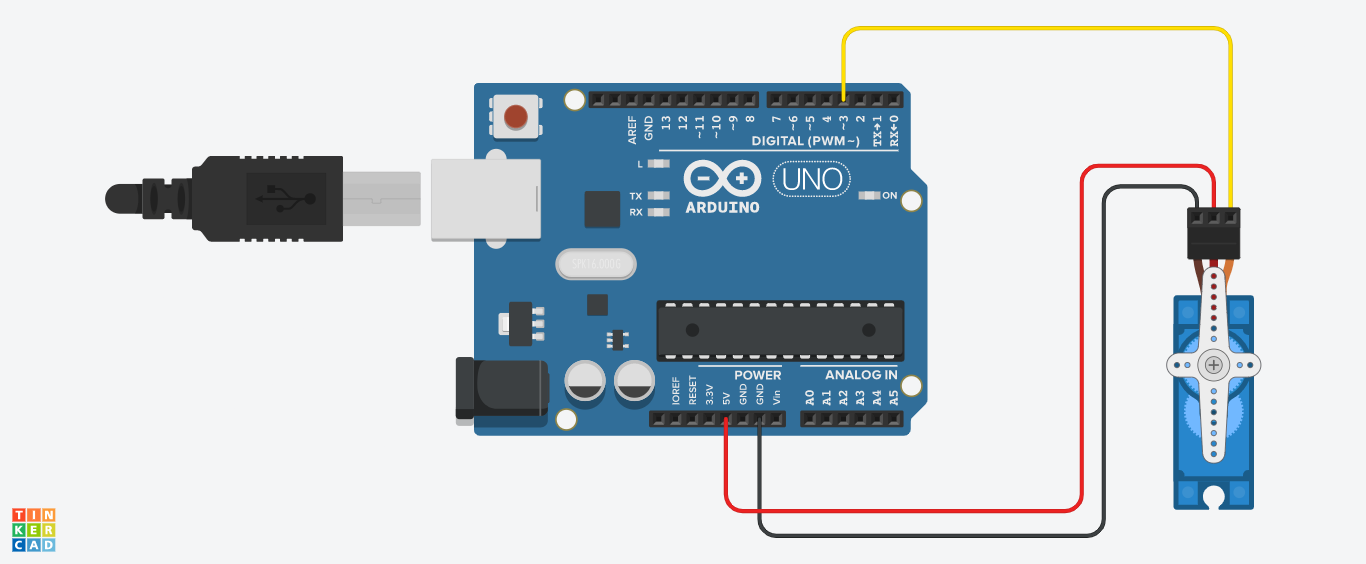
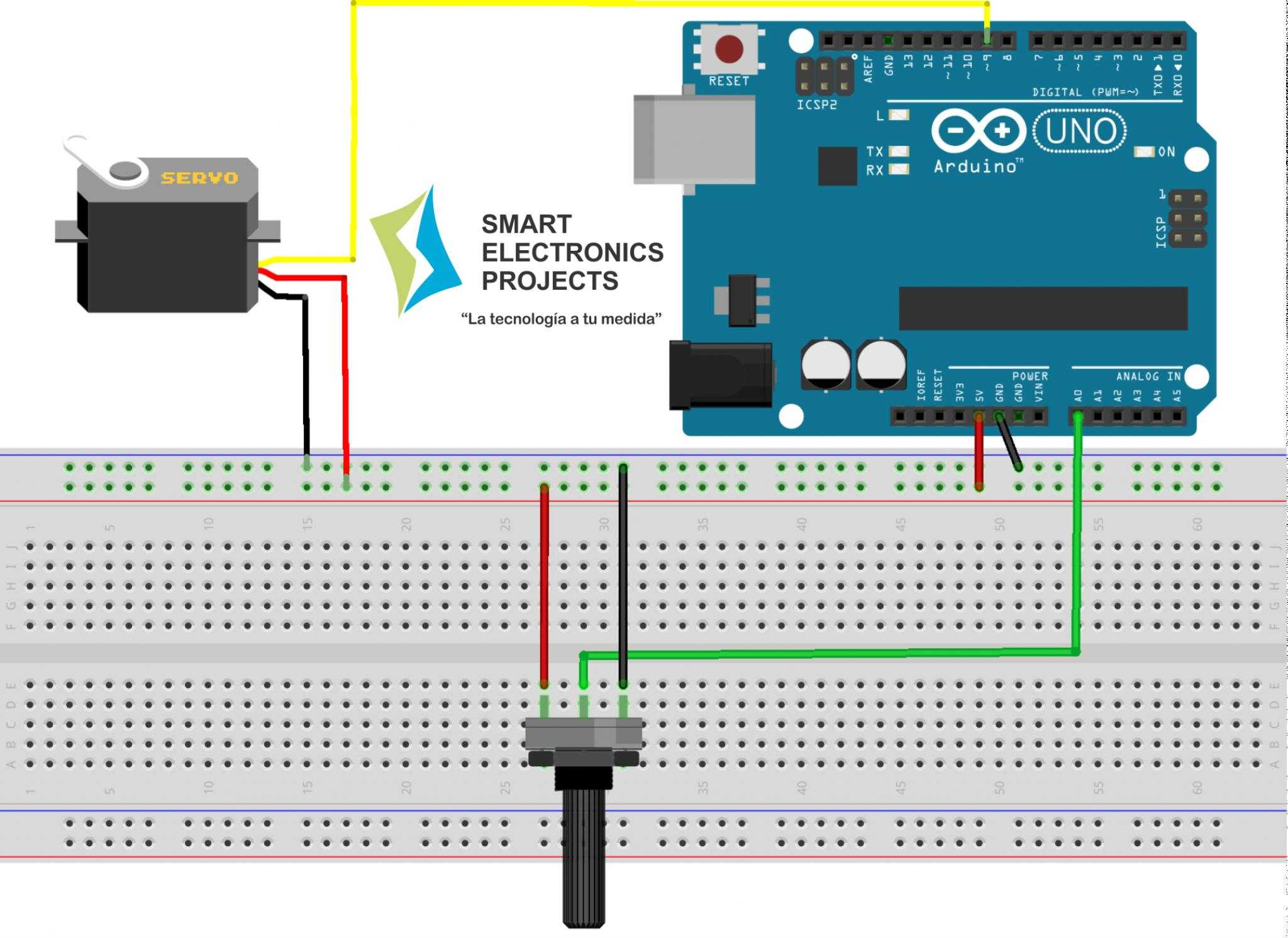
Как подключить сервопривод к Ардуино
Для этого занятия нам потребуется:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- макетная плата;
- 1 сервопривод и потенциометр;
- провода «папа-папа» и «папа-мама».
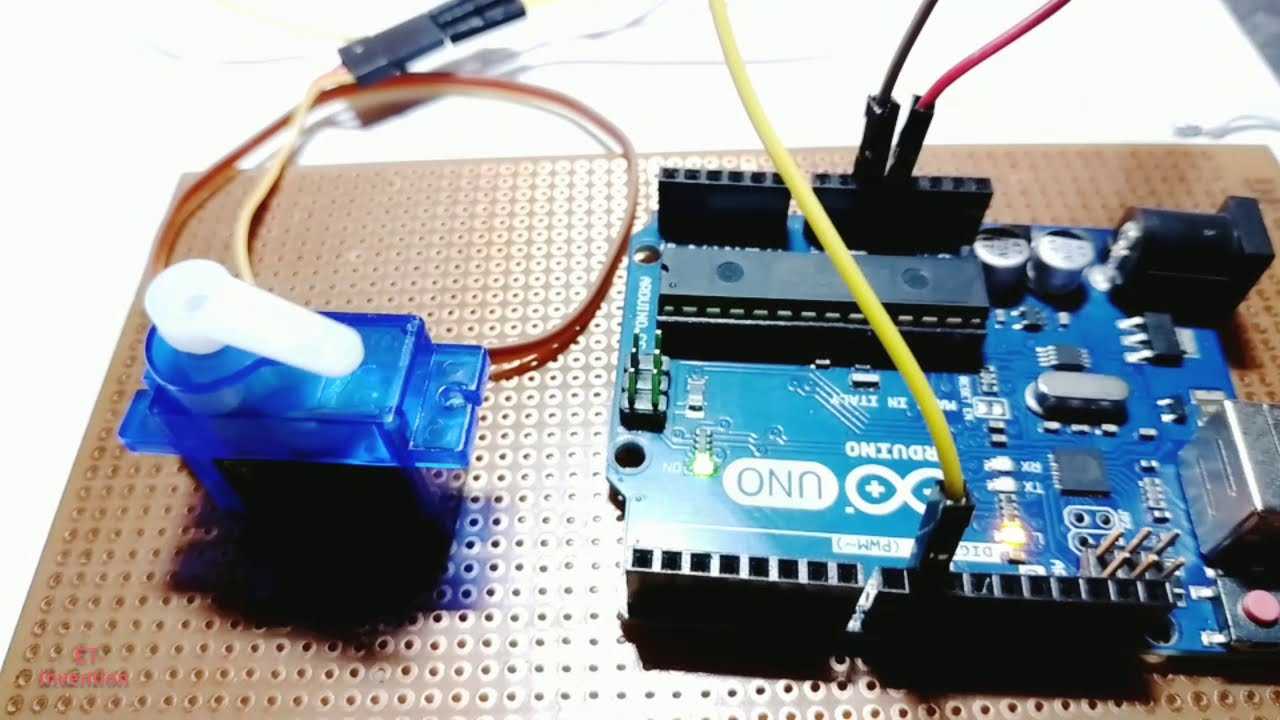
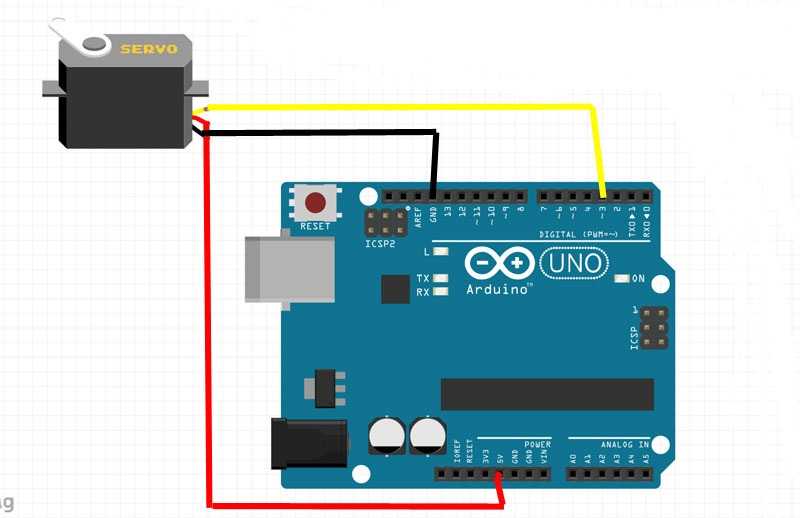
Схема подключения сервопривода к Arduino обычно следующая: черный провод присоединяем к GND, красный провод присоединяем к 5V, оранжевый/желтый провод к цифровому выводу с ШИМ (Широтно Импульсная Модуляция). Управление сервоприводом на Ардуино достаточно просто, но по углам поворота сервомоторы бывают на 180° и 360°, что следует учитывать при разработке проектов.
Схема подключения сервопривода к Ардуино UNO
| Servo | Arduino Uno | Arduino Nano | Arduino Mega |
| черный провод | GND | GND | GND |
| красный провод | 5V | 5V | 5V |
| желтый провод | 11 | 11 | 11 |
В первом скетче мы рассмотрим как управлять сервоприводом на Arduino с помощью команды . Также мы будем использовать стандартную библиотеку . Подключите сервомашинку к плате Ардуино, согласно схеме на фото выше и загрузите готовый скетч. В процедуре мы будем просто задавать для сервопривода необходимый угол поворота и время ожидания до следующего поворота.
Скетч для сервопривода на Ардуино
#include <Servo.h> // подключаем библиотеку для работы с сервоприводом
Servo servo1; // объявляем переменную servo типа "servo1"
void setup() {
servo1.attach(11); // привязываем сервопривод к аналоговому выходу 11
}
void loop() {
servo1.write(0); // ставим угол поворота под 0
delay(2000); // ждем 2 секунды
servo1.write(90); // ставим угол поворота под 90
delay(2000); // ждем 2 секунды
servo1.write(180); // ставим угол поворота под 180
delay(2000); // ждем 2 секунды
}
Пояснения к коду:
- переменная необходима, чтобы не запутаться при подключении нескольких сервоприводов к Ардуино. Мы назначаем каждому приводу свое имя;
- команда привязывает привод к цифровому выходу 10.
- в программе мы вращаем привод на 0-90-180 градусов и возвращаем в начальное положение, поскольку процедура void loop повторяется циклично.
Дополнительные возможности
Потенциометр-слайдер 10КОм. Подключение к arduino
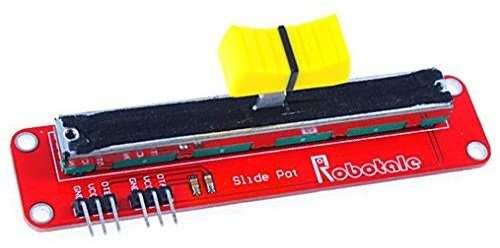
Как уже писал выше, управление сервоприводом будет осуществляться с помощью потенциометра, только потенциометр будет иметь нестандартную форму – слайдер с ползунком. Такой потенциометр стоит дороже обычного кругового, но для некоторых проектов подходит намного удачнее.
Потенциометр имеет две тройки пинов, использовать можно любую из них, отличается они только началом отсчета. Для подключения к ардуино необходимо три провода: VCC – плюс 5 вольт, GND – земля и OTA(или OTB) – это пин с данными, который возвращает значение от 0 до 1023, поэтому подключать к ардуино нужно тоже к аналоговому пину, например A0.
Ниже приведен пример кода, который считывает данные с потенциометра и выводит их.
int val = 0;
void setup() {
Serial.begin(9600);
pinMode( A0, INPUT );
}
void loop() {
val = analogRead(A0);
Serial.println(val);
delay(100);
}
Как работает клешня «хватайки»
Как конкретно работает клешня, в профессиональном аппарате, я не разглядел, поскольку механика была прикрыта защитным кожухом, поэтому пришлось поэкспериментировать.
Поломав некоторое время голову, получилось придумать более-менее рабочий вариант: клешня состоит из четырех «пальцев», которые одним концом фиксируются на неподвижной раме. Так же добавил крестовину, с ней «пальцы» имеют шарнирное соединение примерно посередине. К неподвижной части рамы жестко зафиксировал сервопривод, качалка которого опускает и поднимает ось. Крестовина в свою очередь жестко закреплена к оси и вместе с ней совершает движения вверх и вниз, из-за чего и происходит сжатие и раскрытие клешни. Чтобы было понятнее, ниже находится картинка с клешней. Изображение можно вращать с помощью мышки, зажав ЛКМ и перемещая влево или вправо.
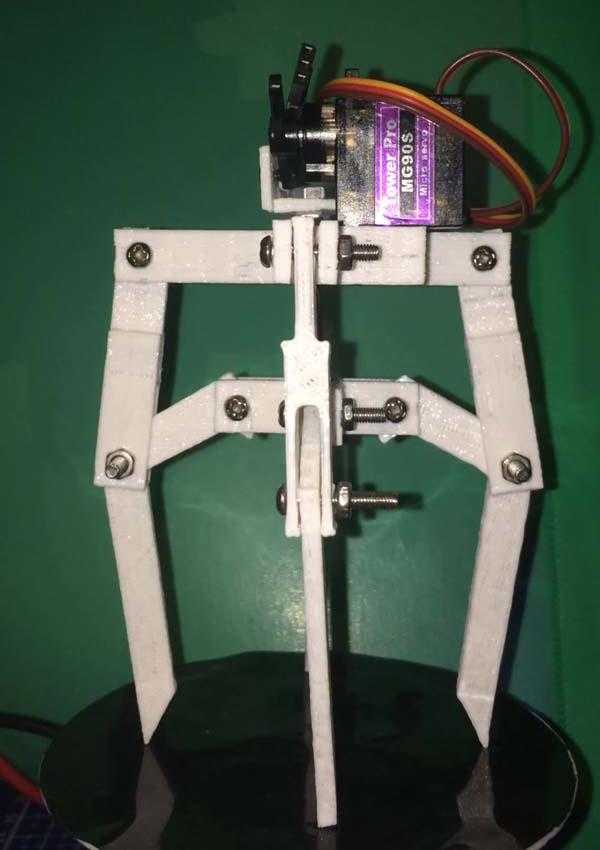
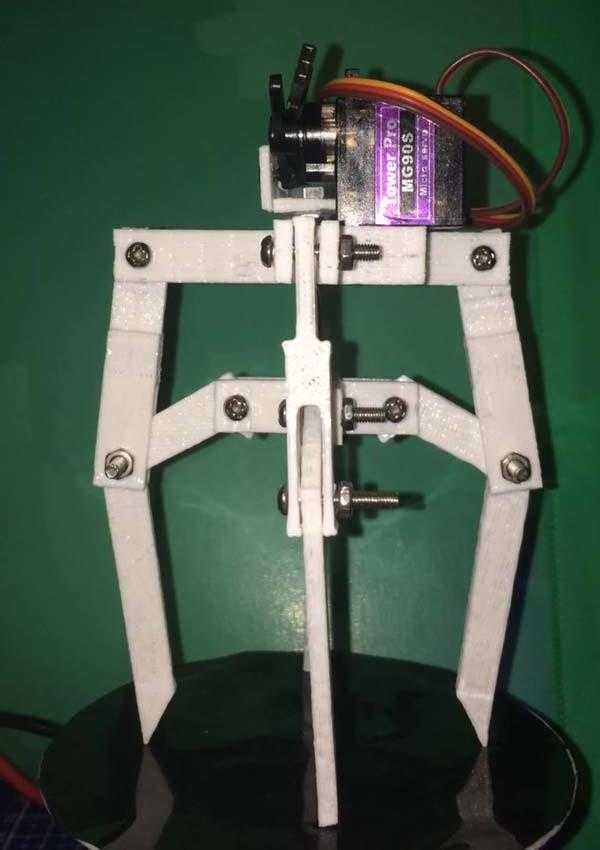
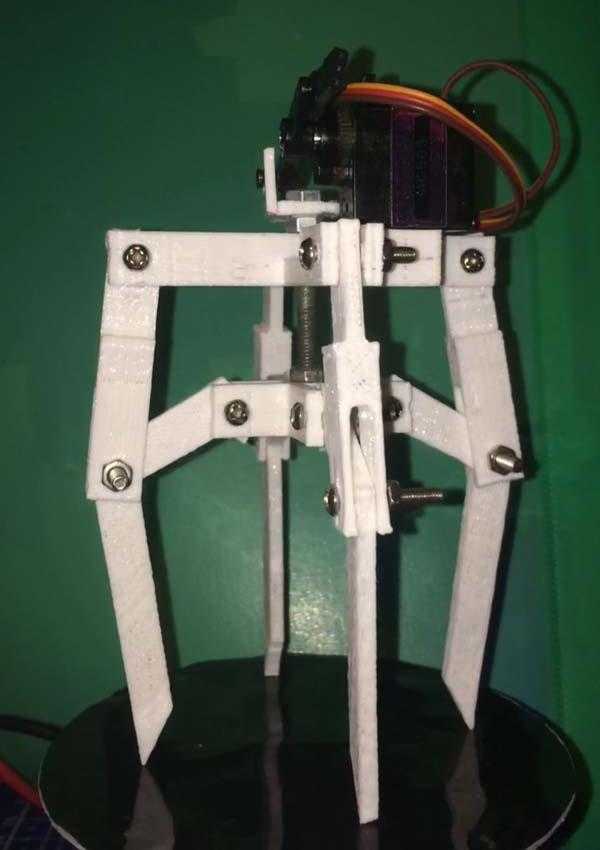


















С изготовлением клешни особо не мучался и напечатал ее на 3D принтере.
Сервоприводы MG995 и MG996 tower pro

Сервомодель MG995 — вторая по популярности модель сервопривода, чаще всего связанная с проектами Arduino. Это относительно недорогие сервоприводы с гораздо большей производительностью, чем SG90.
Характеристики MG995
Выходной вал MG995 вращается на 120 градусов (60 в каждом направлении), хотя многие дилеры указывают на 180 градусов. Устройство выполнено в пластиковом корпусе.
- Вес 55 г;
- Пара 8,5 кг х см;
- Скорость 0,2 с / 60 градусов (при 4,8 В);
- Рабочее питание 4,8 — 7,2 В;
- Рабочие температуры — от 0С до -55С.
Описание MG995
Подключение к Arduino также осуществляется по трем проводам. Как правило, для хобби-проектов разрешается подключать MG995 напрямую к Arduino, но ток двигателя всегда будет создавать опасную нагрузку для входов платы, поэтому по-прежнему рекомендуется подключать сервопривод отдельно, не забывая подключать заземление обе цепи питания. Еще один вариант, облегчающий жизнь, — это использование готовых сервоприводов и экранов, обзор которых мы подготовим в отдельной статье.
MG996R по своим характеристикам похож на MG995, только выполнен в металлическом корпусе.
Примеры кода
Программа крутит вал сначала в одну сторону, затем в другую.
// пины для подключения контактов STEP, DIR #define STEP_PIN 3 #define DIR_PIN 2 // задержка между шагами двигателя #define DELAY_STEPS 10 // количество шагов на 1 оборот #define STEP_ROUND 200 void setup() { // режим для STEP и DIR как OUTPUT pinMode(STEP_PIN, OUTPUT); pinMode(DIR_PIN, OUTPUT); // начальные значения digitalWrite(STEP_PIN, 1); digitalWrite(DIR_PIN, 0); } void loop() { // Крутимся в одну сторону digitalWrite(DIR_PIN, HIGH); // 1 оборот for(int i = 0; i < STEP_ROUND; i++) { digitalWrite(STEP_PIN, HIGH); delay(DELAY_STEPS); digitalWrite(STEP_PIN, LOW); delay(DELAY_STEPS); } // Затем меняем направление и крутимся в другую сторону digitalWrite(DIR_PIN, LOW); // сделать 1 оборот for(int i = 0; i < STEP_ROUND; i++) { digitalWrite(STEP_PIN, HIGH); delay(DELAY_STEPS); digitalWrite(STEP_PIN, LOW); delay(DELAY_STEPS); } }
Так же вы можете прочитать про подключение и настройку драйвера DRV8825, который является приемником этого драйвера на странице «Как подключить DRV8825 к Arduino».
Или приобрести товар на Aliexpress по самой выгодной цене, ссылка.
4.83/5 (9)
Сервоприводные модификации линейного движения
Устройство сервопривода
Сервоприводы имеют несколько составных частей.

Привод — электромотор с редуктором. Чтобы преобразовать электричество в механический поворот, необходим электромотор
. Однако зачастую скорость вращения мотора бывает слишком большой для практического использования. Для понижения скорости используется редуктор
: механизм из шестерней, передающий и преобразующий крутящий момент.





Включая и выключая электромотор, можно вращать выходной вал — конечную шестерню сервопривода, к которой можно прикрепить нечто, чем мы хотим управлять. Однако, для того чтобы положение контролировалось устройством, необходим датчик обратной связи
— энкодер
, который будет преобразовывать угол поворота обратно в электрический сигнал. Для этого часто используется потенциометр. При повороте бегунка потенциометра происходит изменение его сопротивления, пропорциональное углу поворота. Таким образом, с его помощью можно установить текущее положение механизма.
Кроме электромотора, редуктора и потенциометра в сервоприводе имеется электронная начинка, которая отвечает за приём внешнего параметра, считывание значений с потенциометра, их сравнение и включение/выключение мотора. Она-то и отвечает за поддержание отрицательной обратной связи.
К сервоприводу тянется три провода. Два из них отвечают за питание мотора, третий доставляет управляющий сигнал, который используется для выставления положения устройства.
Теперь давайте посмотрим, как управлять сервоприводом извне.
Сервомоторы — общая информация
Сервомоторы — один из типов двигателей , коотрые часто используются в робототехнике, мехатронных проектах, проектах на Arduino.
Положение выходного вала сервомотора определяется длиной импульса. Серва может получать импульсы каждые 20 миллисекунд. Если импульс high длится 1 миллисекунду, угол поворота сервы будет равен нулю. Если 1.5 миллисекунды, тогда серва выйдет в свое центральное положение, а если 2 миллисекунды — выйдет в положение, которое соответствует 180 градусам.
Крайние положения сервомоторов могут отличаться. Кроме того, многие сервы могут поворачиваться на 170 градусов. Есть и «continuous» сервы, которые совершают оборот на полные 360 градусов.
Ардуино уроки для начинающих с нуля
Coursera
Курс по Arduino состоит из серии практических задач про создание вещей, которые работают сами: изучают мир, принимают решения и действуют – двигаются, обмениваются данными друг с другом и с человеком, управляют другими устройствами.
Пройдя этот курс, вы сможете создавать устройства, которые считывают данные о внешнем мире с разнообразных датчиков, обрабатывают информацию, получают и отправляют данные на ПК, в Интернет, на мобильные устройства, управляют индикацией и движением.
Создание устройств будет включать проектирование, изучение компонентов, сборку схем, написание программ, диагностику. Попутно с созданием самих устройств вы сделаете визуализацию на ПК, создадите веб-страницу, которую будет демонстрировать одно из ваших устройств, а также разберетесь с устройством и работой FDM 3D-принтера.
Курс не требует специальных знаний у слушателей, доступен даже ученикам старших классов средней школы. Плюсом будут навыки программирования и владение английским языком на уровне чтения технической документации, однако обязательным это не является.
Весь курс посвящен практике и самым лучшим решением для вас будет раздобыть электронику, повторять показанные примеры и экспериментировать самостоятельно.
Заключение
Сервоприводы играют очень важную роль для многих проектов Ардуино, от робототехнических до систем умного дома. Все, что связано с движением, традиционно требует особых знаний и создать полноценный правильно работающий привод – непростая задача. Но с помощью серводвигателей можно во многих случаях упростить задачу, поэтому серво постоянно используется даже в проектах начального уровня.
В этой статье мы постарались раскрыть разные аспекты использования сервоприводов в проектах arduino: от подключения до написания скетчей. Выбрав самую простую модель серво (например, sg 90) вы сможете без труда повторить приведенные примеры и создать свои первые проекты, в которых что-то движется и изменяется. Надеемся, эта статья поможет вам в этом.