

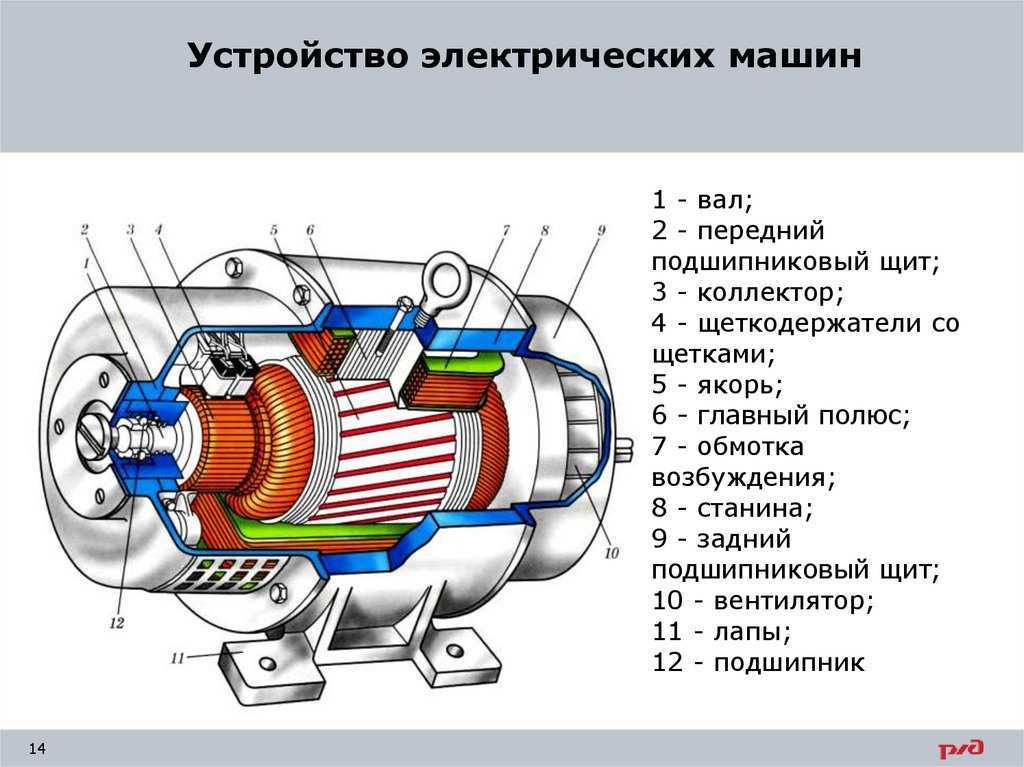
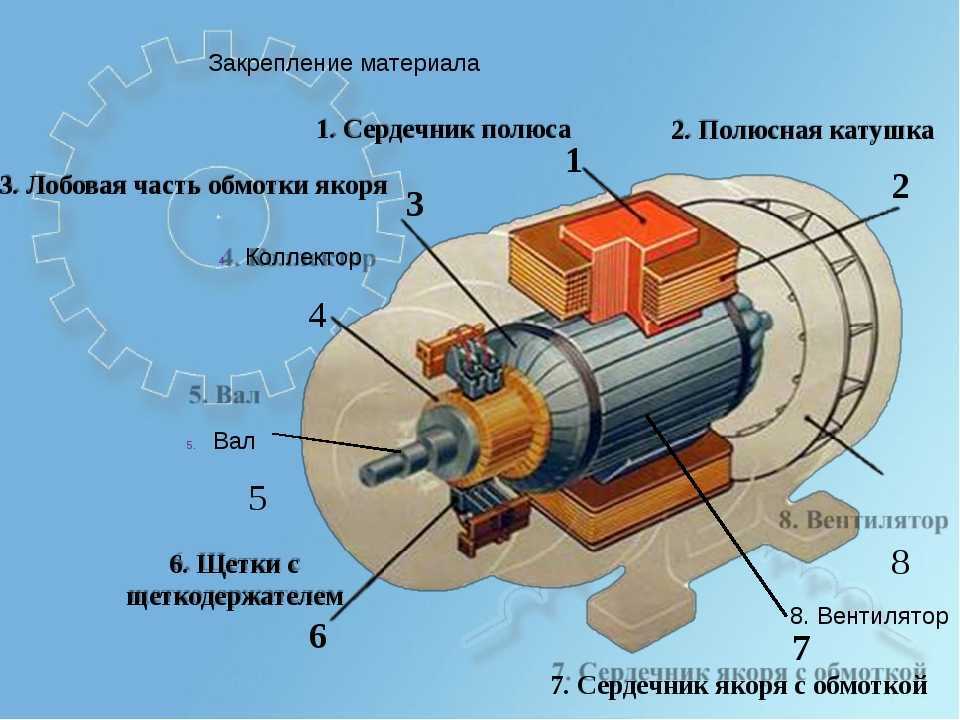
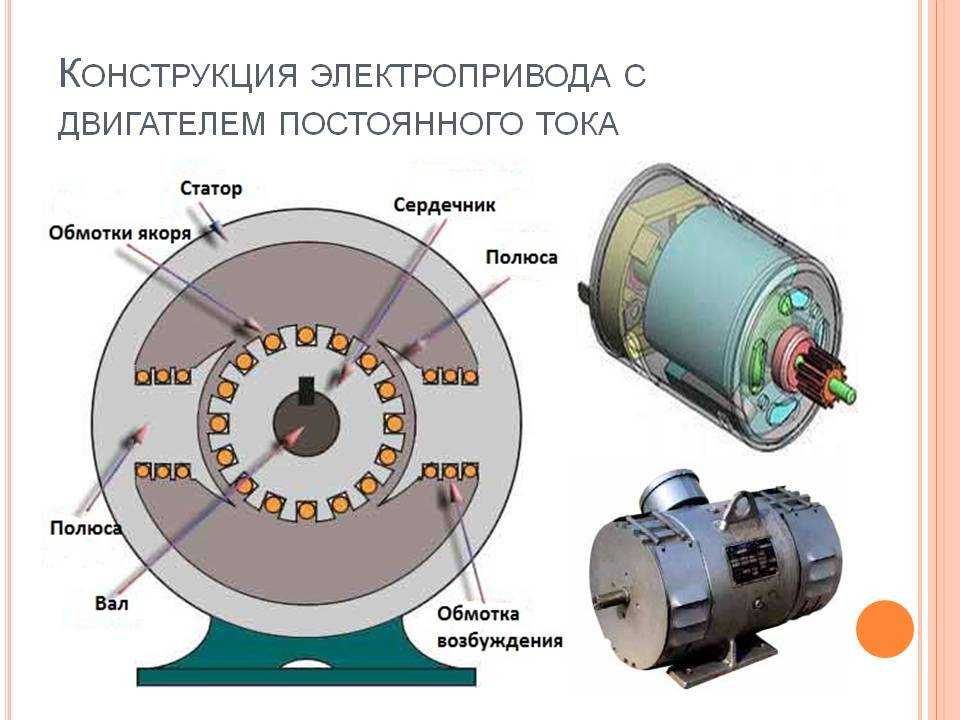
Особенности конструкции и принцип действия
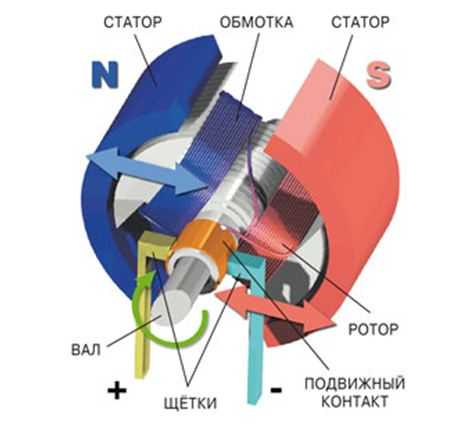
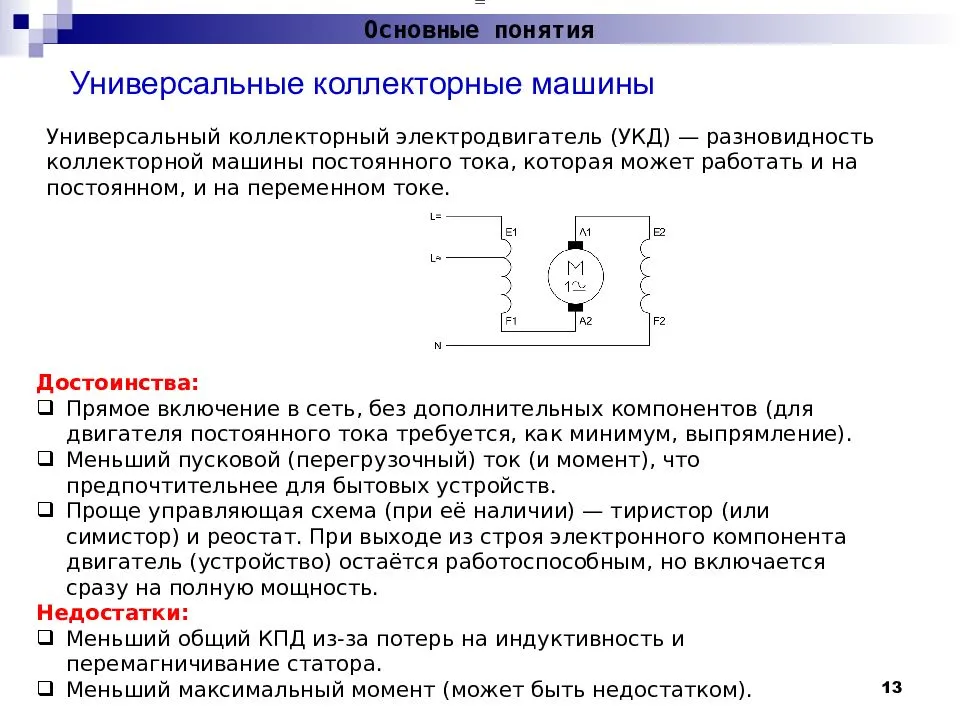
По сути, коллекторный двигатель представляет собой достаточно специфичное устройство, обладающее всеми достоинствами машины постоянного тока и, в силу этого, обладающее схожими характеристиками. Отличие этих двигателей состоит в том, что корпус статора мотора переменного тока для снижения потерь на вихревые токи выполняется из отдельных листов электротехнической стали. Обмотки возбуждения машины подключаются последовательно для оптимизации работы в бытовой сети 220в. Могут быть как одно-, так и трехфазными, благодаря способности работать от постоянного и переменного тока называются ещё универсальными. Кроме статора и ротора конструкция включает щеточно-коллекторный механизм и тахогенератор. Вращение ротора в коллекторном электродвигателе возникает в результате взаимодействия тока якоря и магнитного потока обмотки возбуждения. Через щетки ток подается на коллектор, собранный из пластин трапецеидального сечения и является одним из узлов ротора, последовательно соединенного с обмотками статора.
В целом принцип работы коллекторного мотора можно наглядно продемонстрировать с помощью известного со школы опыта с вращением рамки, помещенной между полюсами магнитного поля. Если через рамку протекает ток, она начинает вращаться под действием динамических сил. Направление движения рамки не меняется при изменении направления движения тока в ней.
Последовательное подсоединение обмоток возбуждения дает большой максимальный момент, но появляются большие обороты холостого хода, способные привести к преждевременному выходу механизма из строя.
Рабочие моменты
Давайте разберем некоторые характеристики и особенности машин постоянного тока.
Пуск и режим реверса
К электрическому двигателю подключен регулятор оборотов
В момент, когда двигатель запускается, якорь имеет неподвижное положение, а значит, ЭДС в нем равна нулю. Из-за того, что сопротивление якорной обмотки очень маленькое, пусковой тока якоря намного превышает номинальный. Если представить себе такой пуск двигателя, то он однозначно бы вышел из строя.
- Чтобы такого не происходило, пусковой ток в двигателях постоянного тока с параллельным возбуждением ограничивается за счет включенного в цепь пускового реостата.
- Пуск при этом необходимо производить при номинальном значении магнитного потока, благодаря чему увеличивается пусковой момент и быстро растет ЭДС в обмотке якоря. В результате двигатель разгоняется быстрее, а время, когда проходит большой пусковой ток по обмотке сокращается.
- Когда разгон двигателя завершается, реостат выводится из цепи – делается это либо плавно, либо ступенчато.
- Для того чтобы остановить двигатель, достаточно отключить подачу питания к нему.
- Для любого электрического двигателя доступен режим вращения в обратном направлении – реверс. Для этого нужно всего лишь изменить направление тока либо в обмотке якоря, либо в обмотке статора.
Потери мощности и КПД

Даже самый технически совершенный двигатель постоянного тока не может работать без потерь мощности
Любой двигатель или генератор постоянного тока работает с потерями мощности. Их делят на два типа: основные и добавочные.
- К первым относят магнитные, электрические и механические.
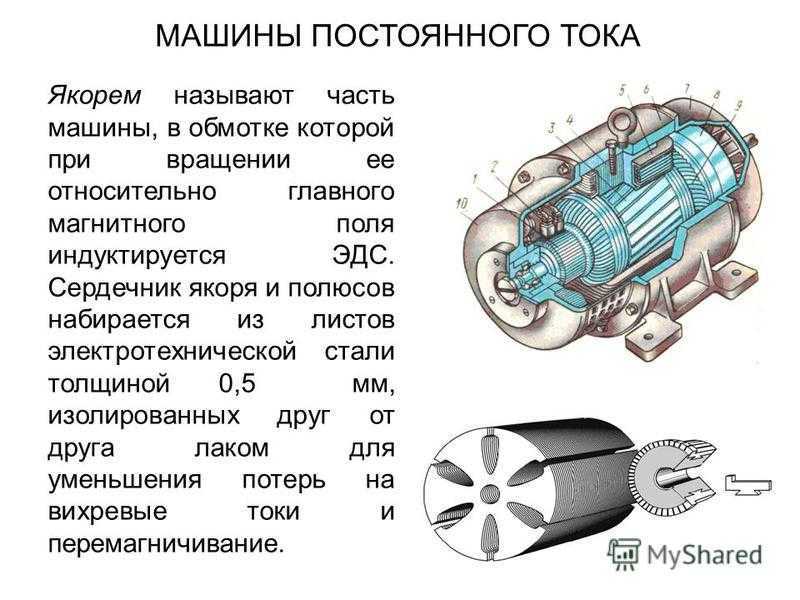
- Магнитные потери, происходящие в стали обозначают ΔРс. Происходят они из-за того, что во время вращения сердечник на якоре постоянно перемагничивается, поэтому возникают потери на гистерезис и вихревые токи.
- Электрические потери (ΔРэл) происходят из-за активного сопротивления обмоток, а также сопротивления щеточного контакта, то есть данное значение представляется в виде суммы указанных потерь.
- Механические (ΔРмех) включают потери на трение подшипников, трение щеток о коллектор, трение вращающегося якоря о воздух (и такое есть) и вентиляционные потери.
- Все остальные потери называются добавочными и связаны они в основном с взаимодействием различных частей агрегата с магнитным полем.

Потери незначительны при отсутствующей нагрузке
Для расчета каждого типа потерь применяются специальные формулы. Мы не будем так глубоко вдаваться в суть, а скажем лишь, что КПД машины постоянного тока определяется отношением отдаваемой мощности, к потребляемой. Выражают данное значение обычно в процентах.
Современные машины постоянного тока стали очень эффективными. КПД у них обычно варьируется в пределах 75-90%.
Рабочие характеристики
![]()
Рабочие характеристики ДПТ
Рабочие характеристики представляют собой следующие зависимости:
- Скорости вращения, потребляемого тока и мощности двигателя;
- КПД от полезной мощности при условии, что напряжение питания неизменно.
- Тока обмотки возбуждения и отсутствия добавочного сопротивления в цепи якоря.
Все эти параметры позволяют говорить о свойствах двигателей в режиме эксплуатации, а также находить оптимальные и экономичные режимы их работы.
Регулировка скорости вращения двигателя
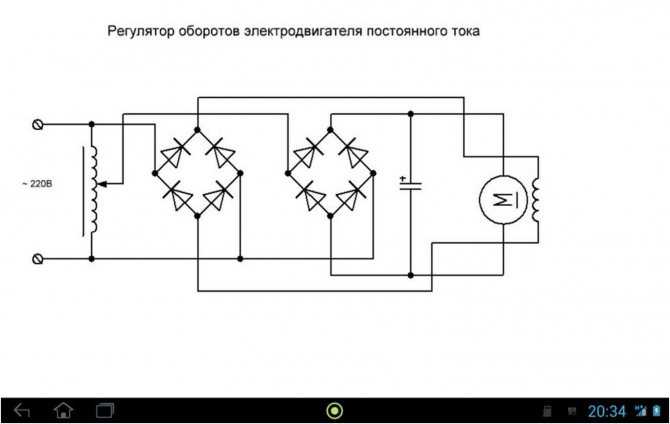
Принципиальная схема регулятора оборотов вращения
Регулировать скорость вращения машины постоянного тока можно тремя способами: изменение напряжения сети, реостатное регулирование, изменение магнитного потока. Давайте обо всем по порядку.
- Изменение напряжения осуществляется за счет устройств, которые могут, собственно, менять величину напряжения.
- Реостатное регулирование, как мы уже упоминали по ходу статьи, нуждается во введении в цепь якоря дополнительных резисторов активного типа, то есть меняющих свои характеристики при определенных условиях.
- Регулирование магнитного потока происходит за счет уменьшения тока возбуждения.
Конечно, мы назвали не все характеристики машин постоянного тока, а лишь основные, но для ознакомления с этими агрегатами этого вполне достаточно.
Видео в этой статье продемонстрирует, как работают данные устройства.
Внешние ссылки [ править ]
| Викискладе есть медиафайлы по теме бесщеточных электродвигателей постоянного тока . |
- Как работают моторы (щеточные и бесщеточные авиационные моторы RC)
- Анимация двигателя BLDC при другой коммутации (блок, звезда, синус (синус) и без датчика) — по сравнению с шаговыми двигателями. Вспышка
- Загадки хобби на радиоуправлении: что такое бесщеточный двигатель
- Электроприводы — Бесщеточные двигатели постоянного / переменного тока и реактивные двигатели с полезными схемами
- Рекуперативный тормоз бесщеточного двигателя постоянного тока для легкого электромобиля
- Как работают бесщеточный двигатель и ESC — видео, объясняющее, как работает бесщеточный двигатель постоянного тока, а также как управлять им с помощью микроконтроллера Arduino.
| vтеЭлектрические машины | |
|---|---|
|
|
| Компоненты и аксессуары |
|
| Генераторы |
|
| Двигатели |
|
| Контроллеры двигателей |
|
| История, образование, рекреационное использование |
|
| Экспериментальный, футуристический |
|
| похожие темы |
|
| Люди |
|
| Авторитетный контроль |
|
|---|
Достоинства и недостатки
По сравнению с обычными двигателями БДПТ имеют следующие достоинства:
- большой кпд;
- высокое быстродействие;
- возможность изменения частоты вращения;
- отсутствие искрящих щеток;
- малые шумы, как в звуковом, так и высокочастотном диапазонах;
- надежность;
- способность противостоять перегрузкам по моменту;
- отличное соотношение габаритов и мощности.
Бесколлекторный двигатель отличается большим кпд. Он может достигать 93-95%.
Высокая надежность механической части БД объясняется тем, что в нем используются шарикоподшипники и отсутствуют щетки. Размагничивание постоянных магнитов происходит довольно медленно, особенно, если они выполнены с использованием редкоземельных элементов. При использовании в контроллере защиты по току срок службы этого узла довольно высок. Фактически срок службы БДПТ может определяться сроком службы шарикоподшипников.
Недостатками БДПТ является сложность системы управления и высокая стоимость.
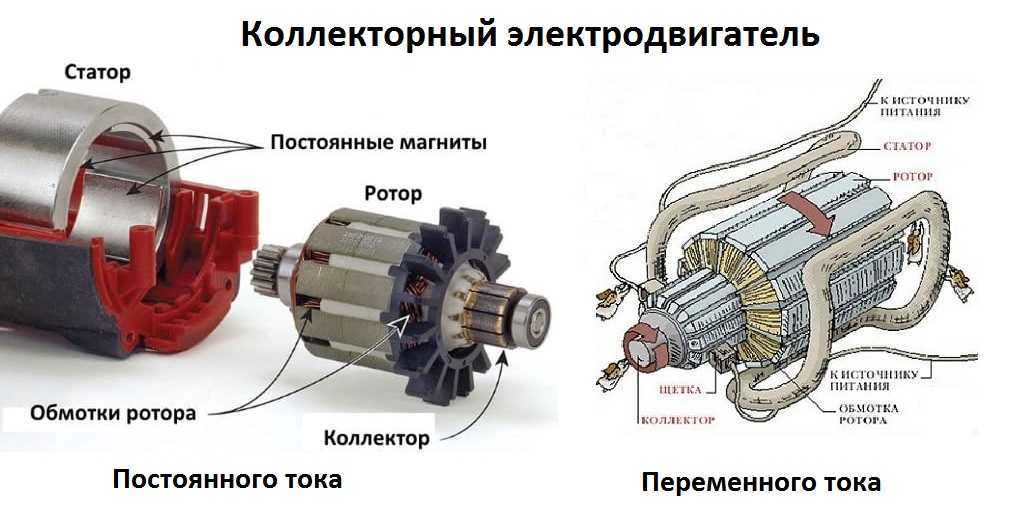
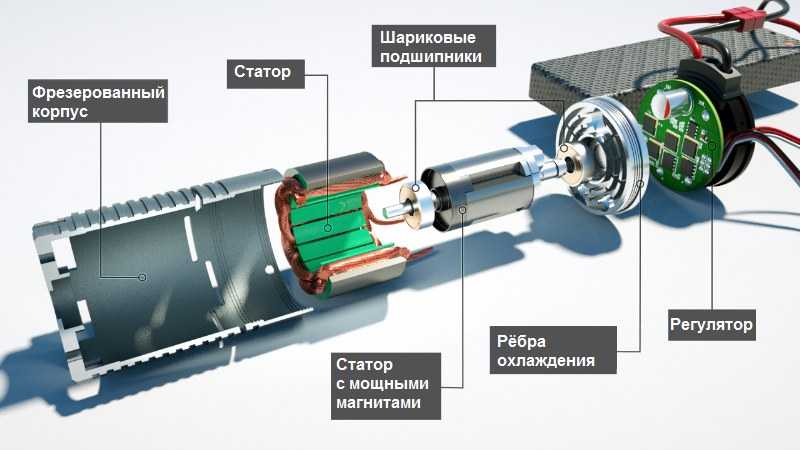
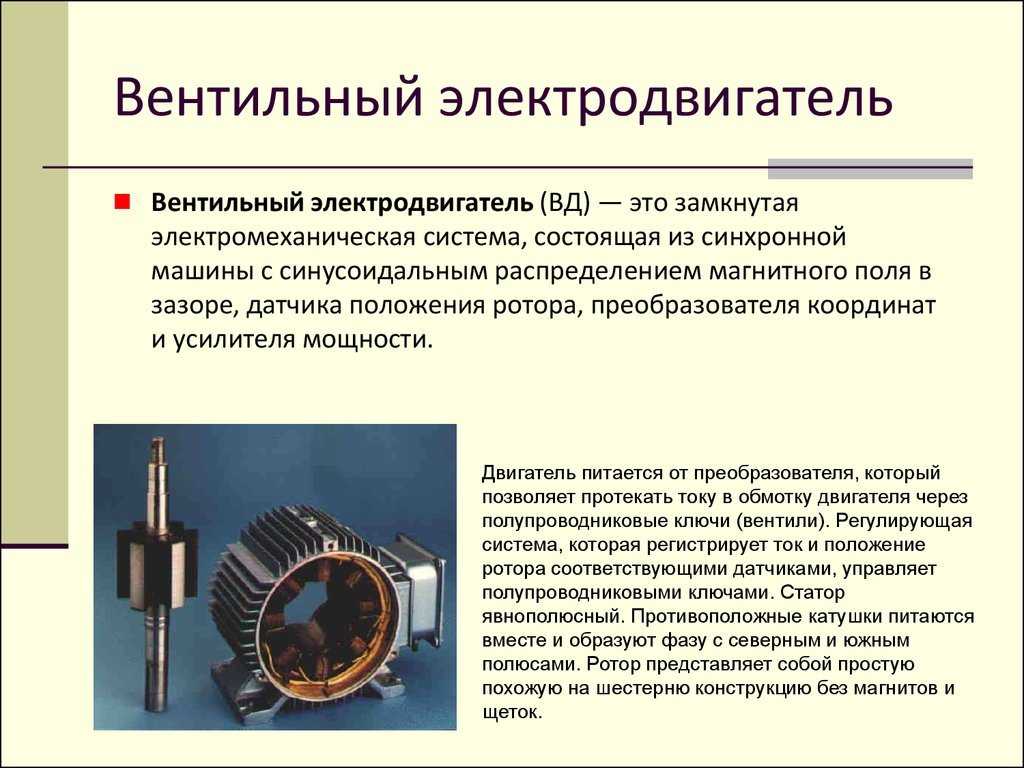
Принцип работы и конструкция
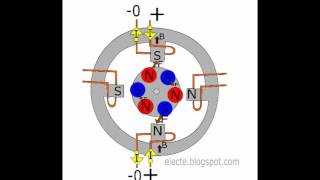
Работа всех двигателей, как правило, основаны на двух принципах, которые являются ; Закон Ампера и закон Фарадея. В первый закон гласит, что электрический проводник, помещенный в магнитное поле, будет испытывать силу, если какой — либо ток, протекающий через проводник имеет компонент под прямым углом к этой области. В втором принципе гласит, что если проводник перемещается через магнитное поле, то любой компонент движение перпендикулярно к этой области будет генерировать разность потенциалов между концами проводника.

Согласно этим законам электродвигатели состоят из двух основных частей; Постоянный магнит и связка проводников, скрученных в катушку. Подавая электричество на катушку, она становится магнитом, и, основываясь на том факте, что магниты отталкиваются на одинаковых полюсах и притягиваются на разных полюсах, достигается вращательное движение.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Рисунок 7. Диаграммы напряжений БД
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД — их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
-
Газогенератор для выработки электроэнергии: поршневые и турбинные модели на природном газе, популярные марки
-
Схемы подключения магнитного пускателя на 220 В и 380 В + как подключить контактор своими руками
- Почему при включении вытяжного вентилятора на двойном выключателе тускло загораются лампочки и вентилятор не работает?
Характеристики
Основные характеристики двигателя:
- номинальная мощность;
- максимальная мощность;
- максимальный ток;
- максимальное рабочее напряжение;
- максимальные обороты (или коэффициент Kv);
- сопротивление обмоток;
- угол опережения;
- режим работы;
- габаритно-массовые характеристики двигателя.
Основным показателем двигателя является его номинальная мощность, то есть мощность, вырабатываемая двигателем в течение длительного времени его работы.
Максимальная мощность – это мощность, которую может отдать двигатель в течение кратковременного отрезка времени, не разрушаясь. Например, для упомянутого выше бесколлекторного двигателя Astro Flight 020 она равна 250 Вт.
Максимальный ток. Для Astro Flight 020 он равен 25 А.
Максимальное рабочее напряжение – напряжение, которое могут выдержать обмотки двигателя. Для Astro Flight 020 задан диапазон рабочих напряжений от 6 до 12 В.
Максимальное число оборотов двигателя. Иногда в паспорте указывается коэффициент Kv – число оборотов двигателя на один вольт. Для Astro Flight 020 Kv= 2567 об/В. В этом случае максимальное число оборотов можно определить умножением этого коэффициента на максимальное рабочее напряжение.
Обычно сопротивление обмоток для двигателей составляет десятые или тысячные доли Ома. Для Astro Flight 020 R= 0,07 Ом. Это сопротивление влияет на кпд БДПТ.
Угол опережения представляет собой опережение переключения напряжений на обмотках. Оно связано с индуктивным характером сопротивления обмоток.
Режим работы может быть длительным или кратковременным. При долговременном режиме двигатель может работать длительное время. При этом выделяемое им тепло полностью рассеивается и он не перегревается. В таком режиме работают двигатели, например, в вентиляторах, конвейерах или эскалаторах. Кратковременный режим используется для таких устройств, как например, лифт, электробритва. В этих случаях двигатель работает короткое время, а затем долгое время остывает.
В паспорте на двигатель приводятся его размеры и масса. Кроме того, например, для двигателей, предназначенных для авиамоделей, приводятся посадочные размеры и диаметр вала. В частности, для двигателя Astro Flight 020 приведены следующие характеристики:






- длина равна 1,75”;
- диаметр равен 0,98”;
- диаметр вала равен 1/8”;
- вес равен 2,5 унции.
Выводы:
- В моделировании, в различных технических изделиях, в промышленности и в оборонной технике используются БДПТ, в которых вращающееся магнитное поле формируется электронной схемой.
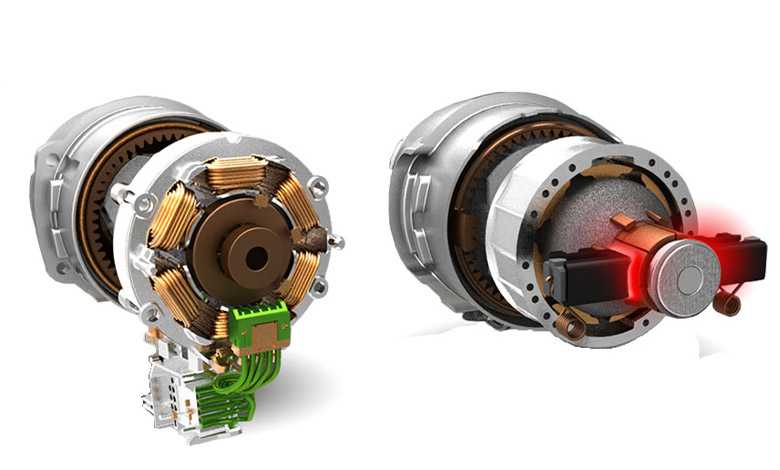
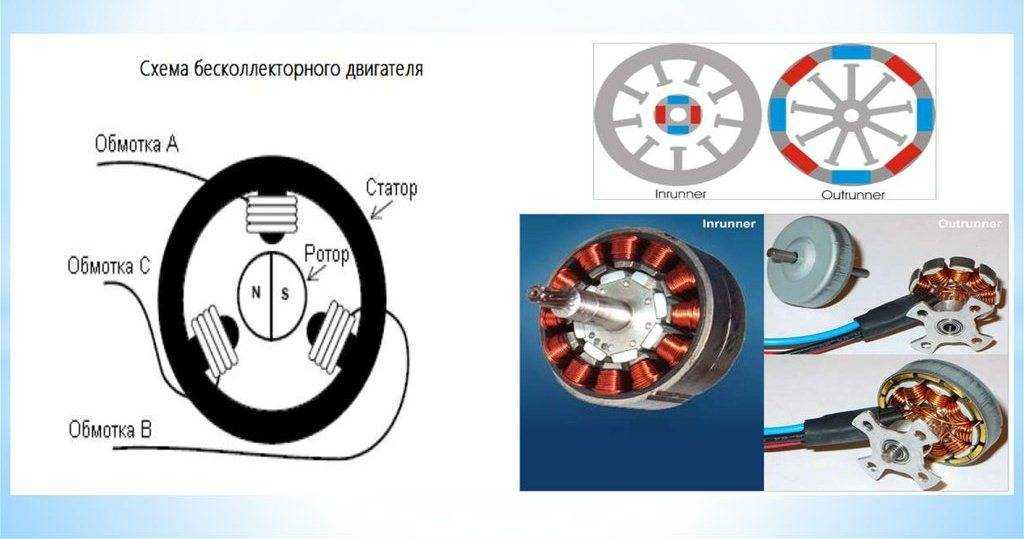
- По своей конструкции БДПТ могут быть с внутренним (inrunner) и внешним (outrunner) расположением ротора.
- По сравнению с другими двигателями БДПТ имеют ряд преимуществ, основными из которых являются отсутствие щеток и искрения, большой кпд и высокая надежность.
Принцип действия
Если у шагового двигателя на статоре имеется две пары полюсов с двумя обмотками управления, то его вращение будет зависеть от подачи напряжения на обмотку управления. При подаче сигнала на обмотку управления, которая находится на первой паре, ротор повернётся и займёт положение по ее оси. Когда на обмотке второй пары полюсов появится сигнал, ротору придётся занять положение между этими полюсами.
При отключении сигнала на обмотке первой пары и оставшемся сигнале на обмотке управления второй пары полюсов ротор повернётся на их ось. Таким образом, при вращении он как будто будет совершать шаги, поэтому и носит такое название. Шаги двигателя (угол поворота ротора) с двумя парами полюсов будут равняться 45 градусам. Система коммутации будет четырехтактной.
Чтобы принцип работы шагового двигателя был понятен даже для чайников, необходимо обратить внимание на схему
Ротор будет занимать положение в пространстве против той пары полюсов, на обмотке которой будет подано питание. Если же питание подано две на обмотки соседних полюсов, ротор займёт положение между ними. Чем меньше значение шага двигателя, тем точнее и устойчивее его работа.
Для работы шагового двигателя необходим коммутатор. Его задачей является превращение импульсов управления определённой последовательности в прямоугольные импульсы в системе с необходимым количеством фаз.
При большой нагрузке на двигатель точность поворота ротора будет нарушена. Он будет поворачиваться с некоторым отставанием, которое является углом статической ошибки. При холостом ходе шагового двигателя значение угла статической ошибки равно нулю.
Так как скорость протекания процессов работы обратно пропорциональна сопротивлению управляющих обмоток, то для того, чтобы ускорить вращение ротора, применяются резисторы. Их присоединяют последовательно в цепь управляющих обмоток статора. Оценивают экономичность работы по основному показателю — значению мощности на входе.
Варианты конструкции [ править ]
| В этом разделе не процитировать любые источники . Пожалуйста, помогите улучшить этот раздел , добавив цитаты из надежных источников . Материал, не полученный от источника, может быть оспорен и удален . ( Май 2018 г. ) ( Узнайте, как и когда удалить этот шаблон сообщения ) |
Схема для стилей намотки треугольником и звездой. (Это изображение не иллюстрирует индуктивные и генераторные свойства двигателя)
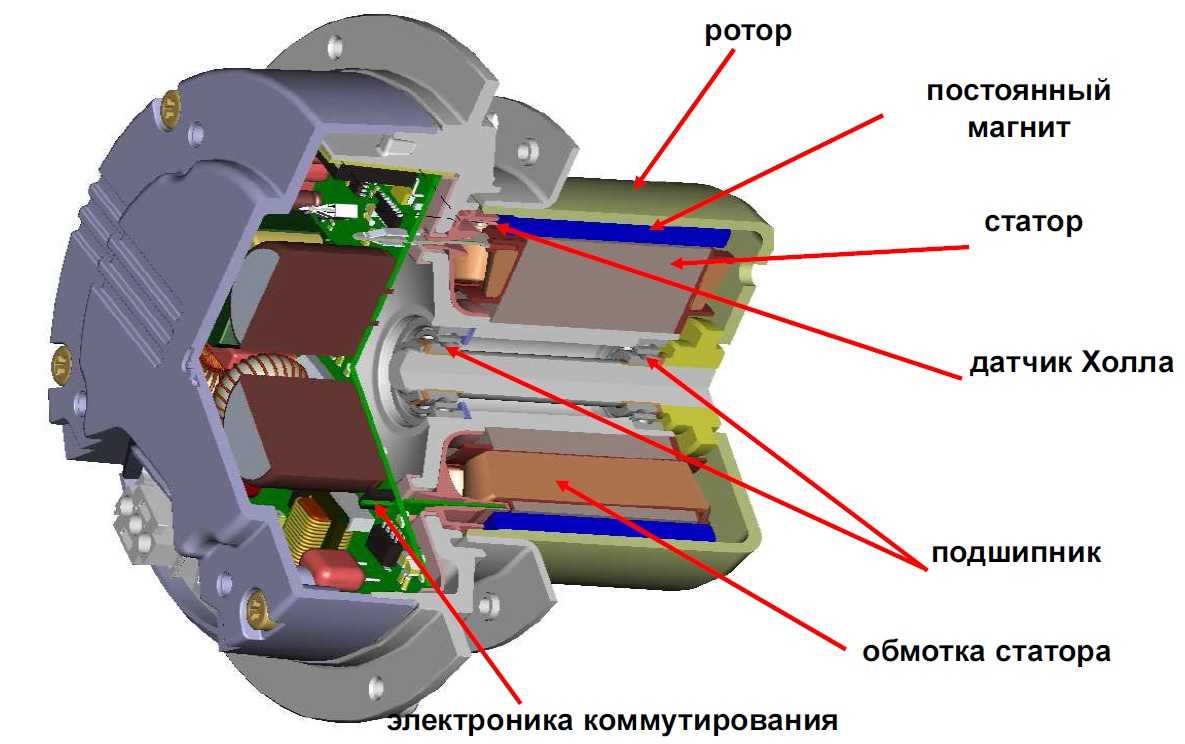
Бесщеточные двигатели могут быть сконструированы в нескольких различных физических конфигурациях: В «традиционной» (также известной как внутренняя ) конфигурация постоянные магниты являются частью ротора. Ротор окружен тремя обмотками статора. В конфигурации внешнего ротора (или внешнего ротора) радиальное соотношение между катушками и магнитами обратное; Катушки статора образуют центр (сердечник) двигателя, в то время как постоянные магниты вращаются внутри выступающего ротора, который окружает сердечник. Плоский или осевой тип потокаиспользуется там, где есть ограничения по пространству или форме, в нем используются пластины статора и ротора, установленные лицом к лицу. У аутраннеров обычно больше полюсов, они объединены в три группы для поддержания трех групп обмоток и имеют более высокий крутящий момент на низких оборотах. Во всех бесщеточных двигателях катушки неподвижны.
Существуют две распространенные конфигурации электрических обмоток; конфигурация треугольника соединяет три обмотки друг с другом ( последовательные цепи ) в треугольную схему, и питание подается на каждое из соединений. Конфигурация звезда ( Y- образная), иногда называемая звездообразной обмоткой, соединяет все обмотки с центральной точкой ( параллельные цепи ), и питание подается на оставшийся конец каждой обмотки.
Двигатель с обмотками в треугольной конфигурации дает низкий крутящий момент на низкой скорости, но может дать более высокую максимальную скорость. Конфигурация «звезда» обеспечивает высокий крутящий момент на низкой скорости, но не такую высокую максимальную.
Хотя на эффективность сильно влияет конструкция двигателя, звездообразная обмотка обычно более эффективна. В обмотках, соединенных треугольником, половинное напряжение прикладывается к обмоткам, прилегающим к ведомому выводу (по сравнению с обмоткой непосредственно между ведомыми выводами), увеличивая резистивные потери. Кроме того, обмотки могут позволить паразитным электрическим токам высокой частоты полностью циркулировать внутри двигателя. Обмотка, соединенная звездой, не содержит замкнутого контура, в котором могут протекать паразитные токи, предотвращая такие потери.
С точки зрения контроллера, два стиля обмоток обрабатываются одинаково.
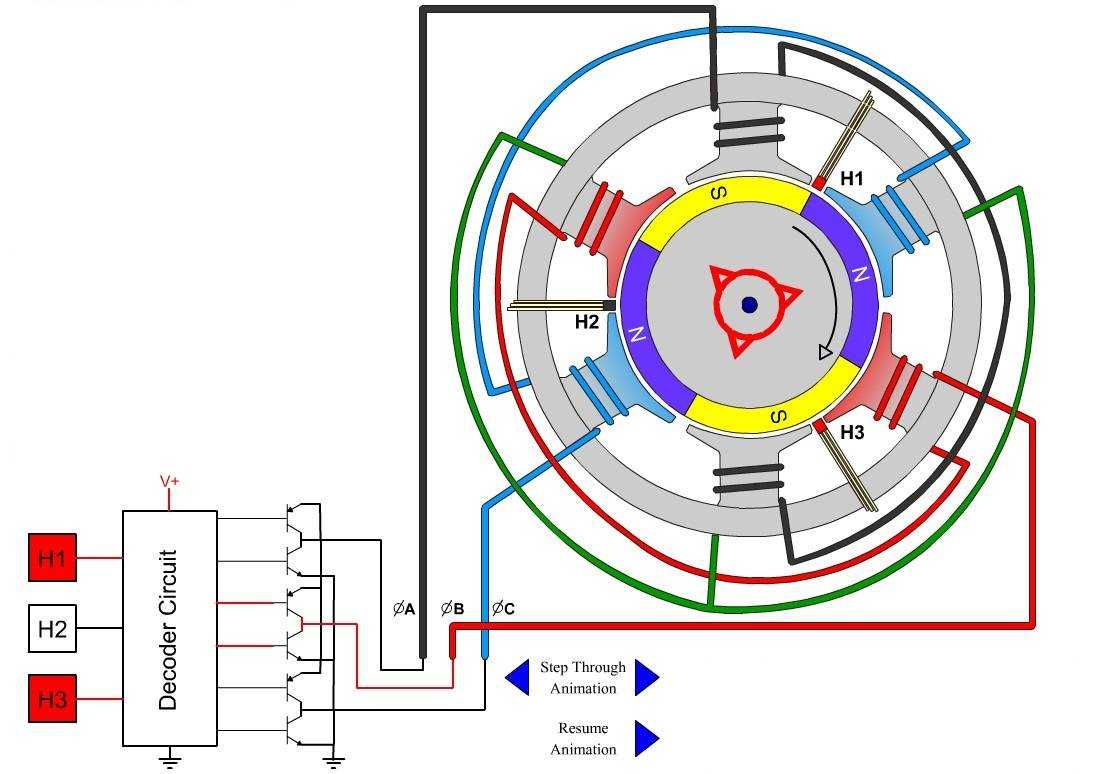
Вычисление положения
Генерирование импульсов происходит в управляющей системе после сигнала, отражающего положение ротора. От стремительности вращения мотора напрямую зависит степень напряжения и подачи. Датчик в стартере определяет положение ротора и подает электрический сигнал. Вместе с магнитными полюсами, проходящими рядом с датчиком, меняется амплитуда сигнала. Также существуют бездатчиковые методики установления положения, к их числу относятся точки прохождения тока и преобразователи. ШИМ на входящих зажимах обеспечивают сохранение переменного уровня напряжения и управление мощностью.
Для ротора с неизменными магнитами подведение тока необязательно, благодаря чему отсутствуют потери в обмотке ротора. Бесщеточный двигатель для шуруповерта отличается низким уровнем инерции, обеспечиваемым отсутствием обмоток и механизированного коллектора. Таким образом появилась возможность использования на высоких скоростях без искрения и электромагнитного шума. Высокие значения тока и упрощение рассеивания тепла достигаются размещением нагревающих цепей на статоре. Стоит также отметить наличие электронного встроенного блока на некоторых моделях.

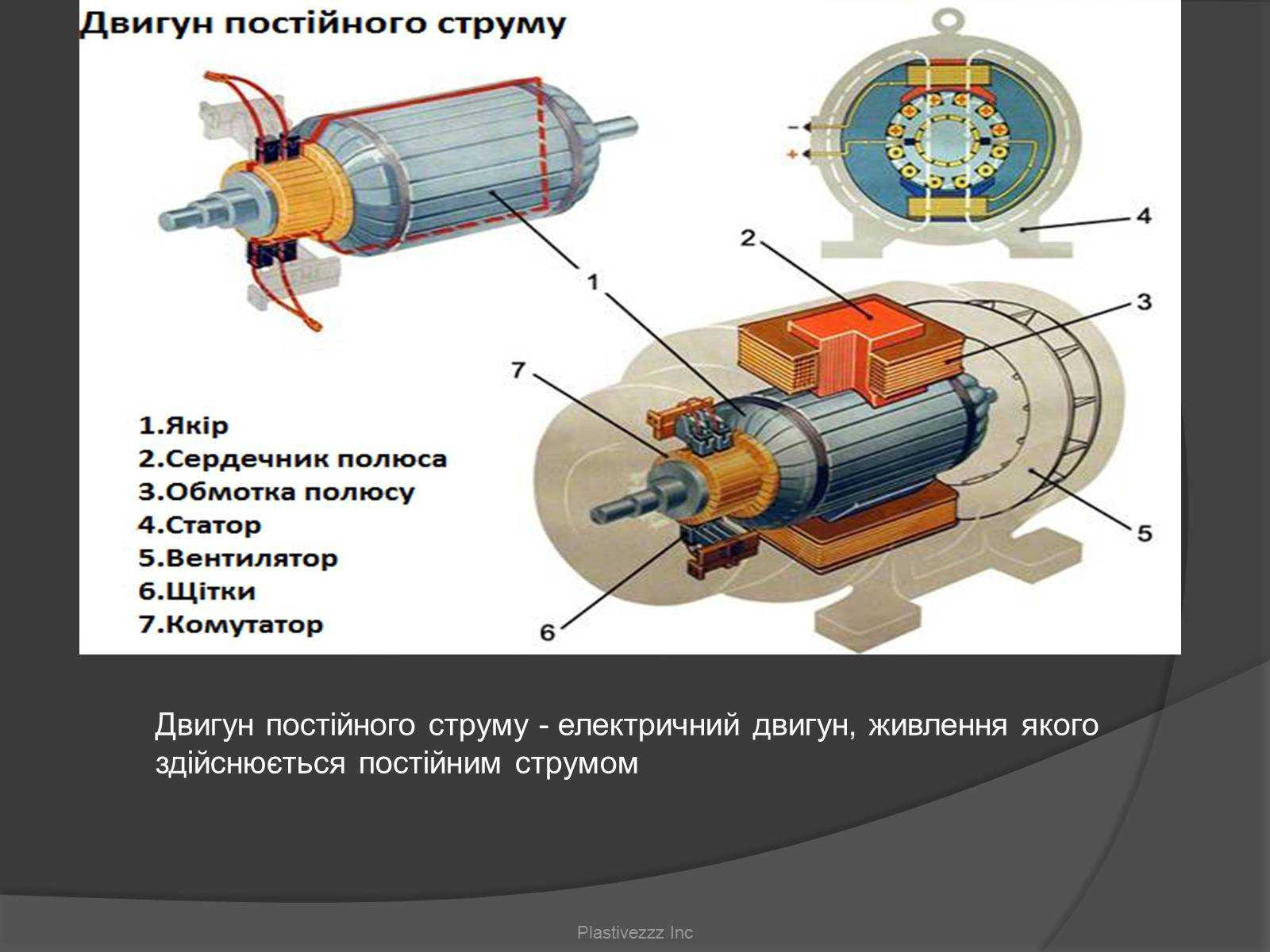
Классификация моторов ПТ
Различия между видами электромоторов заключаются в типе магнитов и способе возбуждения. Магниты могут быть как постоянными, так и электромагнитами. Преимущества постоянного магнита (в отличие от электромагнита):
- компактность;
- не требует источника энергии для работы.
Вид возбуждения ДПТ зависит от места присоединения обмотки полюсов. В связи с этим различают независимое возбуждение мотора (обмотка возбуждения питается от постороннего источника) и самовозбуждение (обмотка возбуждения присоединена к обмотке якоря). Двигатели с самовозбуждением носят более короткие названия:
- шунтовые (параллельное соединение обмоток);
- сериесные (последовательное соединение обмоток);
- компаундные (смешанное соединение обмоток).
Электромоторы применяются в различных областях промышленности и сельского хозяйства, а также бытовых установках. Их разнообразие велико. Основные типы ДПТ:
- традиционного назначения;
- специального назначения.
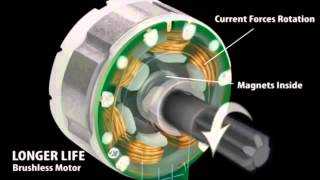
бесщеточный двигатель
В последнее время все чаще используют бесколлекторные или, как их еще называют, «бесщеточные» двигатели…

Как запустить бесколлекторный двигатель? Бк мотор. Brushless starting! Много РУ моделей, FPV, запчастей: https://goo.gl/c6e1Ys…

Видео о том, как работает бесколлекторный мотор. Простым языком, почти для гуманитариев) Группа Техномания…

Принцип работы нового бесщёточного двигателя DeWALT BL motor Подробнее http://www.e-esco.com.ua/news/1/

Мотор остался только на 190kv: https://hobbyking.com/ru_ru/kd-53-30-high-voltage-brushless-outrunner-190kv.html Регулятор: http://ali.ski/LFJmH6 Мой …

Это некоторые предварительные наработки для детского электромобиля или велосипеда.


Применение бесщёточного двигателя – увеличение рабочего цикла и срока службы инструмента. https://handtool.ru/catalog…

В данном ролике мы покажем вам, как работает защита от перегрузки в современных аккумуляторных дрелях-шуру…
Включил с помощью конденсатора безщеточный мотор асинхронник от стиральной машины в 220 В. И вот как он себя…

Бесщеточный аккумуляторный шуруповерт от производителя DeWALT — DCD732D2 можно было бы назвать идеальным , но…





Харьков 0677640338 0954069146 аккумулятор в комплекте не идет.

Диаметр 272 мм Длина 152 мм (без вала) Предусмотрено водяное охлаждение.

Друзья, прошу прощения за работу ФОКУСА, это был 5ый дубль и еще раз переснимать возможности нет. Сегодня…

Какие характерристики БК двигателя выбирать при прочих равных. Просто о моторах! Какие проблемы возникают…
Мой инстаграм: https://www.instagram.com/andrey_99diy Группа в ВК http://vk.com/99diy. Всем привет! Меня…
Неодимовые магниты http://ali.pub/wdakz Эмалированный медный провод 0.2мм http://ali.pub/vs93i Подробнее про бесколлекторные…

Двигатель продал, осталась только видео.

В этом выпуске научимся управлять бесколлекторными (бесщёточными) моторчиками при помощи Ардуино (Arduino),…

В новой рубрике: «Китай — друг моделиста» Протестировал бюджетную БК систему. Surpass 540. Тест проходил на радиоу…

ModelistRC.ru.
Электродвигатели изготовленные с применением бесщеточной технологией Макита отличаются долговечностью,…
Имеем бесколлекторный электродвигатель постоянного тока с КПД 180%. Его опытный образец на этом видио выполн…
Купить https://osaexpress.ru/product/dai-18-2-li-knm4. Аккумуляторная дрель шуруповерт ЗУБР ДАИ-18-2-Ли КНМ4 МАСТЕР — новое поколен…

BRUSHLESS BEAST (Бесколлекторный Зверь). Losi TLR 5IVE-B Race Kit: 1/5 4WD Buggy Мой сайт: http://rcbuyer.ru/ Новый Losi 5IVE-B. Я решил не …

Купить бесколлекторный мотор Racerstar 1806: https://goo.gl/uFmR84 Самодельный бк двигатель от CD-ROM для авиамодели. Я перемо…

Подробнейший показ процесса изготовления мендосинского мотора.Извиняюсь за затянутость, но теперь его…

C6MEY тестирование новой пилы.
Преимущества бесщеточных моторов Hitachi Hitachi Original Brushless Motor Technology.


1 Безщеточный двигатель.

Небольшое видео о взаимозаменяемости запчастей) Не забываем делиться видосами!) Приятного просмотра!) …
Устраняю незначительный брак регулятора бесколлекторного двигателя. Регулятор куплен тут http://ali.pub/y25v7…

Покупайте в нашем магазине: http://50.by/products/shurupovert-bosch-gsr-108-v-ec-bezschetochnyj.








Stm8s-Discovery+irf mosfet+bldc.


ОДНА БАТАРЕЯ ДАЕТ МОЩНОСТЬ ВСЕМ 18V Литий-ионная батарее, Бесщёточный двигатель, На 30%, больше мощности, Произ…

800L/ч 5 м DC 12 В 24 В Солнечная безщеточный Двигатель циркуляция горячей воды и водяного насоса-B119. Ссылка https://ru….
lucktastic hack
pkhex oras
layar kaca21
cincinbear nip slip
rpg maker mv abs
bodyslide tutorial
tremor mod
discord text to speech funny
fileice downloader
depfile premium login
Процесс управления
Наличие электронного блока управления дает возможность проводить коммутацию элементов обмоток электрического привода. Чтобы определить точно момент переключения с использованием драйвера, необходимо отследить актуальное размещжение ротора. В этом поможет уже известный нам датчик Холла, который располагается непосредственно на приводе.
Если же у вас нет в наличии такого прибора, стоит произвести считывание напряжения, движущегося в обратном направлении. Оно получается в обмотках статора, которые на момент измерений не подсоединены к сети. В таких ситуациях применяется контроллер – специализированное комбинированное решение, позволяющее проводить мониторинг всех изменений и точно определять очередность коммутации. Также контроллерное устройство является основным для старта работы мотора, без него запустить прибор невозможно.
Трехфазные модификации
Данные модификации нередко встречаются среди бесколлекторных устройств, работающих с постоянным током. В частности, такие моторы можно увидеть на авиамоделях. Ключевая особенность – наличие преобразователей, которые и дают возможность работать от трех фаз, делая специализированные импульсы из напряжения DC.
Принцип работы приспособлений осуществляется по такому алгоритму:
- на первую катушку (назовем ее условно «А»), применяются импульсы со значением «+». На другую катушку «В» поступают сигналы с характеристиками «-». Из-за этого, якорь начинает вращаться. Датчики, смонтированные на приводе, фиксируют показания смещения и передают соответствующие сигналы на чувствительные элементы контроллера. После происходит коммутация;
- катушка «А» отключается, а сигнал «+» идет уже на третью обмотку – «С». Компонент «В» не изменяется;
- катушка «С» принимает импульс «плюсовой», «минусово» же подается на «А»;
- работают два компонента: «А» и «В». Каждый из них получает сигналы «+» и «-» соответственно;
- импульс «+» идет на вторую обмотку, а «-» — на третью;
- под конец снова запускается катушка «А», принимающая «плюсовые» импульсы, в то время, как «минусовой» поступает на «С».
 Напряжения двигателя
Напряжения двигателя
Заключение
Итак, подведем итоги и обозначим в чем разница между коллекторным и бесколлекторным двигателем, перечислив их особенности.
Коллекторный двигатель:
- Есть щетки и коллектор, которые искрят и изнашиваются.
- Нужно чаще обслуживать, соответственно и срок службы не слишком долгий.
- Легко регулировать скорость лишь изменением напряжения.
- Для реверса нужно просто сменить полярность.
- Два предыдущих факта позволяют их использовать в бюджетных устройствах без сложных электросхем.
Бесколлекторный двигатель:
Для запуска нужен контроллер, который хоть и не слишком дорого стоит, но увеличивает конечную стоимость, схемотехнику и вес изделия.
Весят меньше чем коллекторные, при одинаковой мощности (но это частично компенсируется предыдущим фактом).
Нет щеток и коллектора, поэтому не требуют обслуживания, не искрят.
Больший срок службы, он ограничен лишь ресурсом подшипников ротора.
Стоят обычно дороже чем коллекторные.
Зачастую выдают больший момент на валу и обороты.
При наличии датчиков положения вала обеспечивают большую стабильность оборотов при изменении нагрузки (жесткая механическая характеристика)
Это особенно важно при использовании на станках и ручном инструменте.. От автора:. От автора:
От автора:
Добавлю то, что нельзя однозначно сказать какой лучше или какой мощнее, можно найти коллекторный двигатель размером с холодильник, а можно бесколлекторный размером с ноготь. При этом оба будут отлично выполнять те функции, на которые рассчитаны и использоваться в конкретных устройствах с учетом требований к их надежности и особенностям эксплуатации. Каждый вид электропривода хорош по своему и идеален по конструкции как таковой.
Теперь вы знаете, в чем разница между коллекторным и бесколлекоторным двигателем, а также какие плюсы и минусы у каждого варианта исполнения. Надеемся, предоставленная информация была для вас полезной и интересной!
Материалы по теме:
- Чем отличается трансформатор от автотрансформатора
- Разница между контактором и пускателем
- Что лучше поставить: дифавтомат или УЗО
Опубликовано:
05.07.2019
Обновлено: 05.07.2019