

Зачем нужно добавочное сопротивление?
Добавочное сопротивление служит для запуска двигателя с нагрузкой на его валу. Как только достигаются номинальные обороты вала, сопротивление отключается за ненадобность, а кольца закорачиваются. В противном случае работа электродвигателя будет нестабильной, возникнут потери КПД.
Роль добавочного внешнего сопротивления, как правило, выполняет ступенчатый реостат. В этом случае двигатель будет разгонятся тоже ступенчато. Часто используются устройства, способные поднять КПД двигателя, при этом избавляя щетки от излишнего трения о кольца. После разгона устройство поднимает щетки и замыкает кольца.
Для реализации автоматического пуска электродвигателя используется подключенная индуктивность к обмотке ротора. Дело в том, что в тот момент, когда осуществляется пуск, в роторе показатели индуктивности и частоты тока максимальны. При разгоне двигателя эти показатели падают, а в конечном итоге двигатель выходит на нормальный рабочий режим.
Ротор
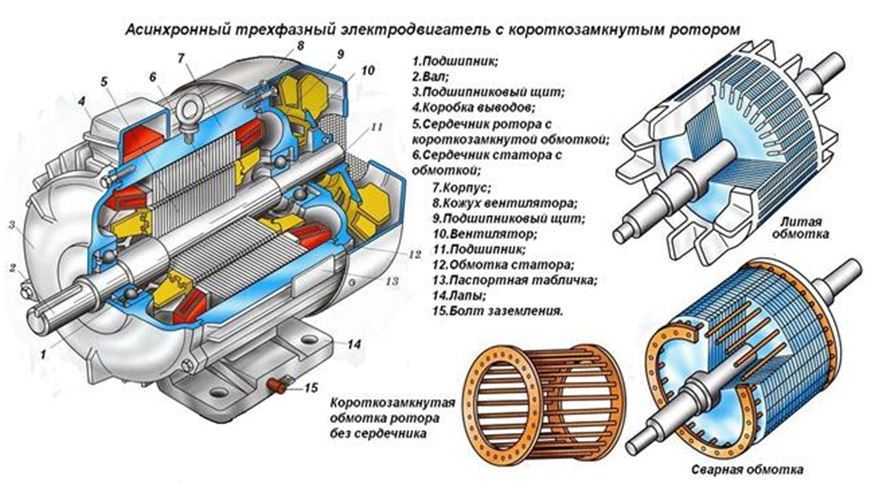
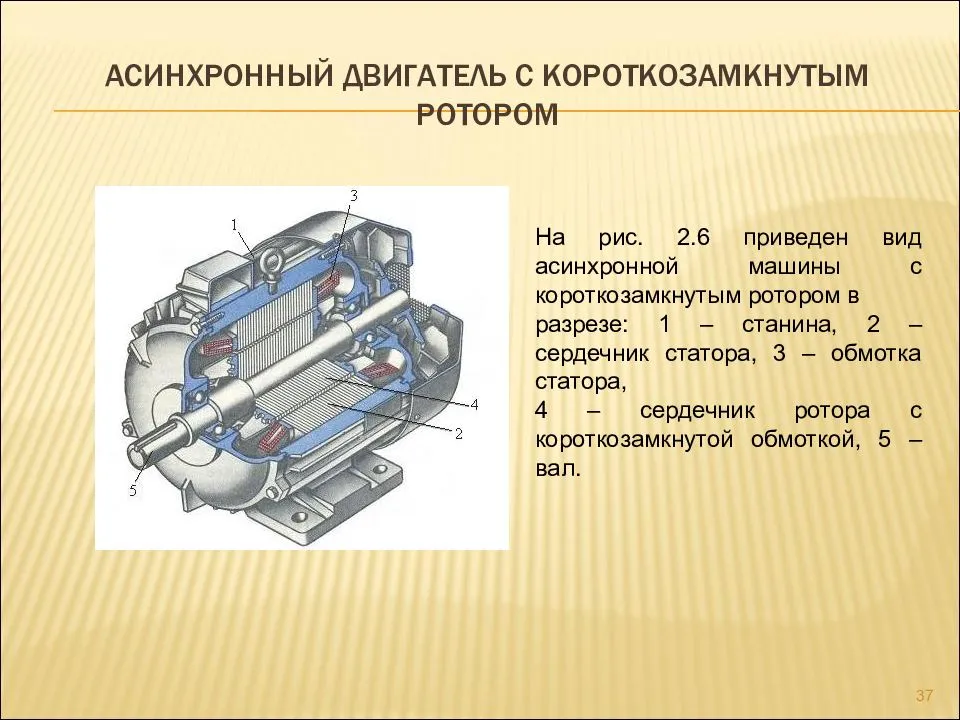
 Ротор в асинхронном электродвигателе представляет собой вал, на котором закрепляется сердечник, набранный из листов электротехнической стали. Что трехфазный, что однофазный мотор, ротор имеет практически одинаковую конструкцию. В качестве обмотки в обычных асинхронных моторах на рабочую частоту 50Гц используются куски медного или алюминиевого провода большой толщины или стержни, соединенные между собой торцевыми замыкающими кольцами.
Ротор в асинхронном электродвигателе представляет собой вал, на котором закрепляется сердечник, набранный из листов электротехнической стали. Что трехфазный, что однофазный мотор, ротор имеет практически одинаковую конструкцию. В качестве обмотки в обычных асинхронных моторах на рабочую частоту 50Гц используются куски медного или алюминиевого провода большой толщины или стержни, соединенные между собой торцевыми замыкающими кольцами.
Для того чтобы обмотка надежно удерживалась в сердечнике, имеются специальные пазы, куда она запрессована. Торцевые кольца могут быть снабжены вентиляционными лопатками, предназначенными для улучшения интенсивности охлаждения внутреннего пространства. Вал закреплен на подшипниках, впрессованных во фланцы или плитах, закрепленных к станине в зависимости от устройства.
Между валом и статором имеется зазор, величина которого зависит от пусковых параметров мотора. Если необходимо увеличить мощность и момент, то он должен быть как можно меньше. Одновременно с ростом мощности увеличиваются и добавочные потери в верхних слоях статора и ротора.
Область применения электродвигателей с фазным ротором
Ад с фазным ротором, за счет высокого крутящего момента, низких пусковых токов и способности долговременно работать при повышенных нагрузках, используются там, где необходима большая мощность электродвигателя, но нет необходимости плавно регулировать скорость вращения в широких диапазонах. Кроме того, эти машины отлично приспособлены под пуск с нагрузкой на валу.
За счет высокой производительности, наиболее часто АД с фазным ротором используются на различном серьезном, тяжелом силовом оборудовании, например, подъемных кранах, лифтовых приводах, станках, различных подъемниках. Иными словами, эти двигатели используются там, где есть необходимость запуска под нагрузкой, а не на холостом ходу.
Маркировка электродвигателя
Для упрощения процесса подключения и выбора схемы асинхронного 3-фазного ЭД на каждом из них имеется соответствующая маркировка. В ней указываются такие характеристики, как:
- крутящий момент;
- мощность;
- максимальная скорость вращения;
- cosφ.
Также в зашифрованной маркировке имеется указание типа двигателя, количества полюсов. Их необходимо учитывать при выборе мотора для тех или для других нужд. А для облегчения процесса подключения все концы сводятся в клеммную коробку, где подписаны следующим образом:
- U1, V1, W1
- U2, V2, W2
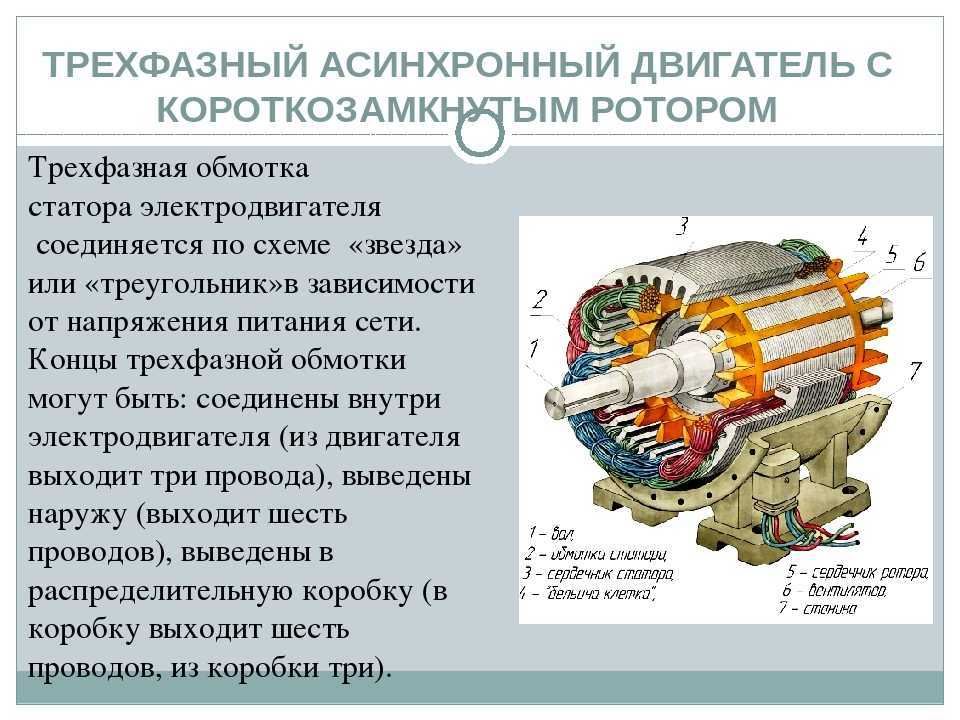
Если мотор подключается к сети 380 В с линейным напряжением обмоток 220В, то его схема обмоток должна быть треугольником. Но если двигатель подключается к стандартной сети 380В, то схема включения обмоток должна быть звездой.
Устройство фазного ротора
Механическая характеристика асинхронного двигателя, скольжение s
Для асинхронных двигателей всегда характерно скольжение s, возникающее из-за того, что синхронная частота вращающегося магнитного поля n1 статора выше реальной частоты вращения ротора n2.
Скольжение возникает потому, что индуцируемая в стержнях ЭДС может иметь место только при движении стержней относительно магнитного поля. То есть ротор всегда вынужден хоть немного, но отставать по скорости от магнитного поля статора. Величина скольжения равна s = (n1-n2)/n1.
Если бы ротор вращался с синхронной частотой магнитного поля статора, то в стержнях ротора не индуцировался бы ток, и ротор бы просто не стал вращаться. Поэтому ротор в асинхронном двигателе никогда не достигает синхронной частоты вращения магнитного поля статора, и всегда хоть чуть-чуть но отстает по частоте вращения от частоты синхронной.
Скольжение s измеряется в процентах, и на холостом ходу практически приближается к 0, когда момент противодействия со стороны ротора почти отсутствует. При коротком замыкании (ротор застопорен) скольжение равно 1.
Вообще скольжение у асинхронных двигателей с короткозамкнутым ротором зависит от нагрузки и измеряется в процентах. Номинальное скольжение — это скольжение при номинальной механической нагрузке на валу в условиях, когда напряжение питания соответствует номиналу двигателя.
Режимы работы

Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Векторное управление с обратной связью
Этот режим отличается более высокой точностью управления скоростью двигателя. Обратную связь обеспечивает энкодер, который сопрягается с частотным преобразователем через дополнительный модуль.
Энкодер устанавливается на валу электродвигателя либо последующего механизма и передает данные о текущей частоте вращения. На основании полученной информации преобразователь меняет напряжение, момент и, соответственно, скорость двигателя. Стоит добавить, что при больших динамических нагрузках (частых изменениях момента) и работе на пониженных скоростях рекомендуется применение принудительного охлаждения внешним вентилятором.
Другие полезные материалы:
5.18.5 Сельсины
Представим себе два асинхронных двигателя с фазным
ротором включенным последующей схеме (рис. 5.18.5.1). Обмотки статора С1,
С2, С3, называемые обмотками возбуждения, включены в общую
сеть трехфазного тока.





Обмотки ротора P1, P2, P3
объединены трехпроводниковой линией связи. Магнитные потоки обмоток возбуждения
при q1=q2 наводят в соответствующих
обмотках роторов равные и совпадающие по фазе ЭДС.
Если ротор двигателя Д1 повернуть на угол q1,
а ротор Д2 оставить на месте (q2=0), то в фазных обмотках
ротора двигателя Д2 будет наведена ЭДС E2>E1. В результате
в линии связи потечет ток DI от большего потенциала к меньшему.
,
где 2z — сумма сопротивлений обмоток роторов и линии связи.
Этот ток, пройдя по обмоткам роторов, взаимодействуя
с магнитными полями статоров, вызовет образование дополнительных вращающих моментовDM. Поскольку направление момента DМ в каждом двигателе
будет свое, то в одном из них произойдет поворот ротора вправо (у двигателя
Д2), а у другого — влево (у двигателя Д1).
Следовательно, оба двигателя самостоятельно (синхронно)
придут в положение (q1=q2).
Такая система получила название синхронно-следящей.
Практическое использование эта система получила
в многоприводных механизмах (конвейерах, козловых кранах и т.п.).
В автоматике применяются так называемые сельсины.
Это маломощные асинхронные машины с однофазным статором и трехфазным ротором.
Сельсины применяются для целей измерения или определения
угла, на который повернулся определенный механизм.
В сельсинной передаче всегда используются две машины:
сельсин-датчик и сельсин-приемник.
Обмотки возбуждения бывают обычно однофазные и
располагаются на явновыраженных полюсах. Число полюсов всегда два. Обмотки синхронизации
— трехфазные, размещаются в пазах ротора и оканчиваются тремя контактными кольцами
(рис. 5.18.5.2).
В отличие от силовых синхронно-следящих систем,
поворот ротора сельсина-датчика осуществляется принудительно, а ротор сельсина-приемника
приходит в движение автоматически. Поворот ротора фиксируется индикаторной стрелкой.
При наличии однофазных обмоток возбуждения на статоре
поворот ротора сельсина-датчика может осуществляться в любую сторону, т.к. пульсирующее
магнитное поле статора обеспечивает для этого необходимые условия.
Помимо приведенного индикаторного режима, сельсины
могут работать и в так называемом трансформаторном режиме.
В этом случае сельсин-приемник, не только показывает
угол рассогласования q, но и вырабатывает электрический сигнал
для управления мощным механизмом
Скольжение S
Параметр скольжения есть во всех асинхронных силовых агрегатах. Возникает данное явление из-за разницы в частоте вращения магнитного поля статора и ротора. Индуцируемая в стержнях ЭДС может появляться только при их движении относительно магнитного поля. Ротор при этом немного отстает.
Если скорости вращения одинаковы, в стержнях клетки не индуцируется ток, что делает невозможным дальнейшее движение. Поэтому в любом исполнении и рабочей нагрузке ротор движется с немного меньшей скоростью, чем магнитное поле.
Измерение скольжения производится в процентах. На холостом ходу данный показатель стремится к 0. При застопоренном роторе (КЗ) параметр равен 1. В асинхронной системе с короткозамкнутым ротором параметр скольжения зависит от нагрузки.
Расчёт числа повторений
Возьмём m1 – процесс повторения постоянного поля магнитов и ротора. Система фазы переменного тока образуют вращение поля магнитов.
Данные расчета считаются по формуле:
m1=60f1/p
f1– частота электричества$
p – количество полюсных пар каждой обмотки статора.
m2 – процесс повторения вращения ротора. Имея различное количество одновременных повторений, данная скорость частоты будет асинхронной. Определение расчёта частоты проводится по соотношению между данными:
(m2≠m1)
Асинхронный электродвигатель работает только при асинхронной частоте.
(m2<,m1)
При одновременном вращении статора и ротора, расчет скольжения будет равняться нулю.
Двухроторный АД используется для привода разных механизмов. Различие двухроторного двигателя заключается присутствием в конструкции двух роторов. Второй ротор выполняет функцию вспомогательную, может вращаться с другой скоростью. Вспомогательный ротор представляет собой внутренний хомут для замыкания постоянного потока магнитов, охлаждения электродвигателя. Недостаток двухмоторного асинхронного двигателя в низком КПД от использования ферромагнитного вспомогательного ротора.
https://youtube.com/watch?v=oxS9KdALqhA
В ходе исследования двухроторных машин достигаются близкие данные скоростик желаемым, когда вспомогательный ротор имеет максимальные вентиляционные зазоры. Полый ротор установлен на ступице, его вал расположен внутри цилиндра. При вращении вспомогательного ротора вентиляция работает по принципу центробежного вентилятора. Для увеличения пускового момента и большей электрической нагрузки полый ротор должен регулироваться, перемещаясь вдоль вала, с установленным штифтом, конец чего входит в паз ступицы ротора.
Данные для расчета:
Пусковой ток
Прямой пуск мотора характеризуется значительно большим уровнем тока, чем при его стабильной работе. Пусковой показатель может превышать номинал в 5-8 раз. При этом номинальный ток всегда указывается производителем на шильдике двигателя, тогда как пусковой описан только в технической документации. В характеристиках этот параметр указан как отношение пускового тока к номинальному.



Как вычислить пусковое напряжение?
Есть несколько способов произвести расчет пускового тока для асинхронного двигателя. Эти варианты пригодятся в том случае, если величина соотношения не указана в технической документации или сопровождающие бумаги были утеряны:
- Осциллограф. Проверка показаний производится в момент пуска посредством резисторного шунта. Действующее напряжение вычисляют из максимального амплитудного значения, после чего, используя закон Ома, определяют пусковой ток. Преимущество такого способа в получении конкретных данных по определенному двигателю.
- Пониженное напряжение. В таком варианте на двигатель подается сниженное в 5-10 раз напряжение и производится замер. После пересчета получается пусковой ток. Причем замеры достаточно произвести для 1 фазы. На остальных пусковые показатели должны быть аналогичными. Данный способ применяется на производстве для получения данных, отображаемых в таблице. Основанием служит номинальный ток, поэтому в каждом отдельном случае пусковой показатель может быть другим.
- Токоизмерительные клещи. Простой и быстрый метод. Наиболее точные показания получаются при замере на системах с длительным пуском и высокой инерцией. Например, это могут быть вентиляторы или двигатели с массивной крыльчаткой.
- Трансформатор. Способ, применяемый в узлах учета электроэнергии. Используя трансформатор, не нужно измерять реальный ток, достаточно получить его величину, уменьшенную в определенное количество раз. Существенным минусом метода является то, что трансформатор рассчитан на частотный диапазон в 50-60 Гц, тогда как пусковые переходные процессы могут иметь более широкий спектр и гармоники.
Важно помнить, что, в силу определенных факторов, заявленный производителем пусковой ток будет иметь большую кратность, чем его реальное значение
Как уменьшить напряжение при пуске асинхронного мотора
Большое пусковое усилие часто становится проблемой, вызывая перегрузки питающей сети, перегрев, ускоренный износ двигателя. Поэтому необходимо иметь возможность понизить его величину для сохранения работоспособности и долговечности систем. Есть несколько способов:
- Плавный пуск. В таком варианте на двигатель подается сначала пониженное напряжение с постепенным повышением до номинала. Для реализации метода используются УПП (устройства плавного пуска) или частотные преобразователи.
- Ограничители. В таком исполнении в качестве ограничивающего элемента при пуске применяются резисторы с высокими показателями сопротивления. После срабатывания таймера производится переключение двигателя на номинальное значение. Для сборки такого пускового устройства достаточно использовать контактор и реле времени, поэтому сделать его можно самостоятельно.
- Звезда-треугольник. Особый способ подключения обмоток, который позволяет сразу использовать полное напряжение на прямой пуск и реверс, однако выводить магнитное поле двигателя на номинальную мощность постепенно. Такой подход помогает сохранить рабочие характеристики агрегата. Чертеж подобного подключения можно найти в интернете.
Есть также варианты запуска и раскручивания асинхронного реверсивного двигателя вхолостую. Нагрузка подключается только после достижения достаточных оборотов. В таком исполнении могут применяться вариаторы, муфты, коробки передач. При необходимости реализовать быструю остановку, можно использовать динамическое торможение, для чего на обмотки статора подается постоянное напряжение.
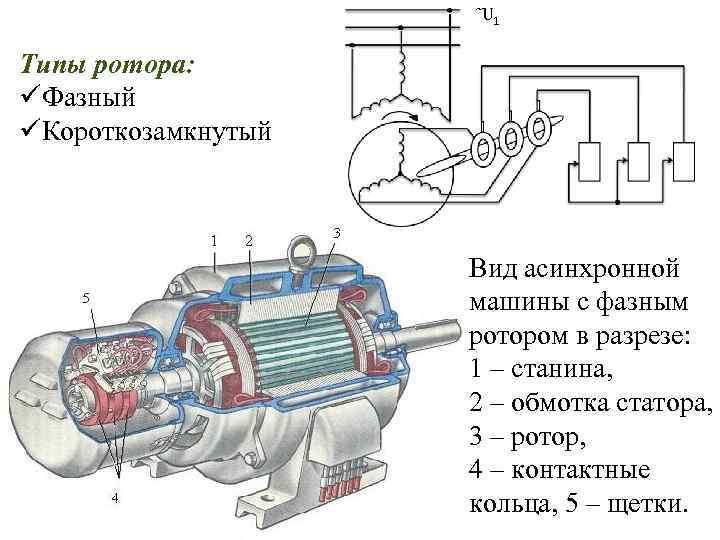
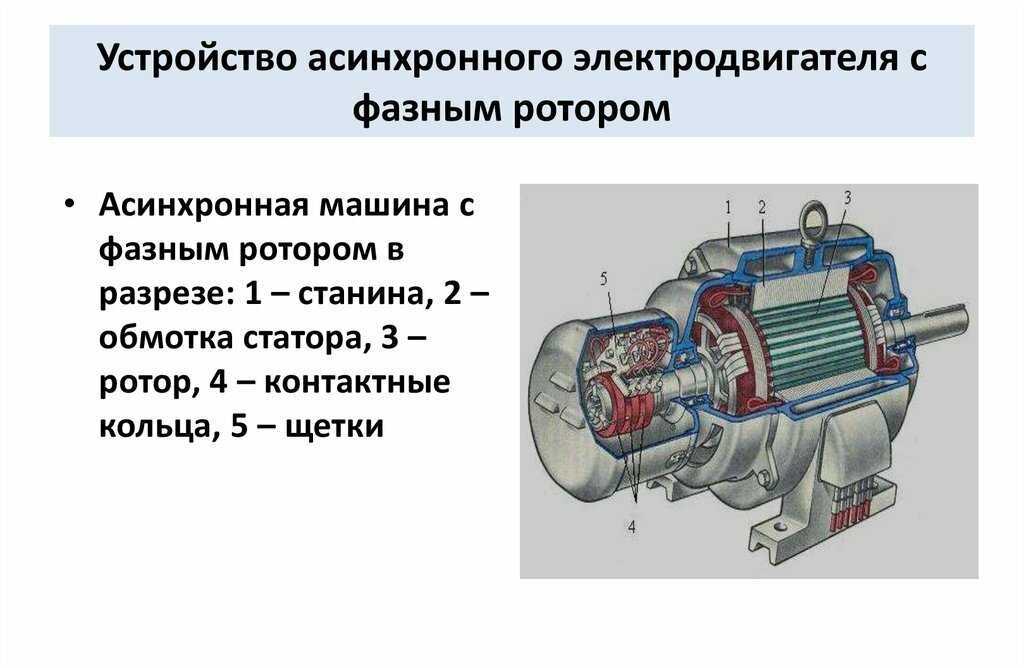
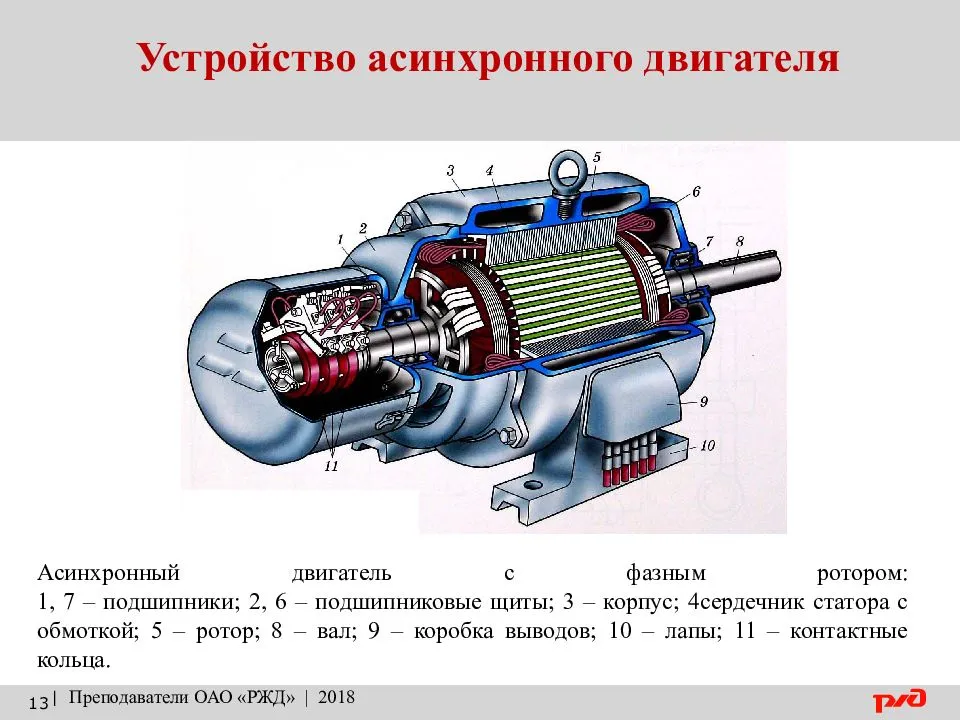
Фазный ротор
Фазный ротор
Асинхронные двигатели с фазным ротором, в отличие от асинхронных двигателей с короткозамкнутым ротором, имеют на роторе полноценную трехфазную обмотку. Подобно тому, как на статоре уложена трехфазная обмотка, так же и в пазах фазного ротора уложена трехфазная обмотка.
Выводы обмотки фазного ротора присоединены к контактным кольцам, насаженным на вал, и изолированным друг от друга и от вала. Обмотка фазного ротора состоит из трех частей — каждая на свою фазу — которые чаще всего соединены по схеме «звезда».
К обмотке ротора через контактные кольца и щетки присоединяется регулировочный реостат. Краны и лифты, например, пускаются под нагрузкой, и здесь необходимо развивать существенный рабочий момент. Невзирая на усложненность конструкции, асинхронные двигатели с фазным ротором обладают лучшими регулировочными возможностями касательно рабочего момента на валу, чем асинхронные двигатели с короткозамкнутым ротором, которым требуется промышленный частотный преобразователь.
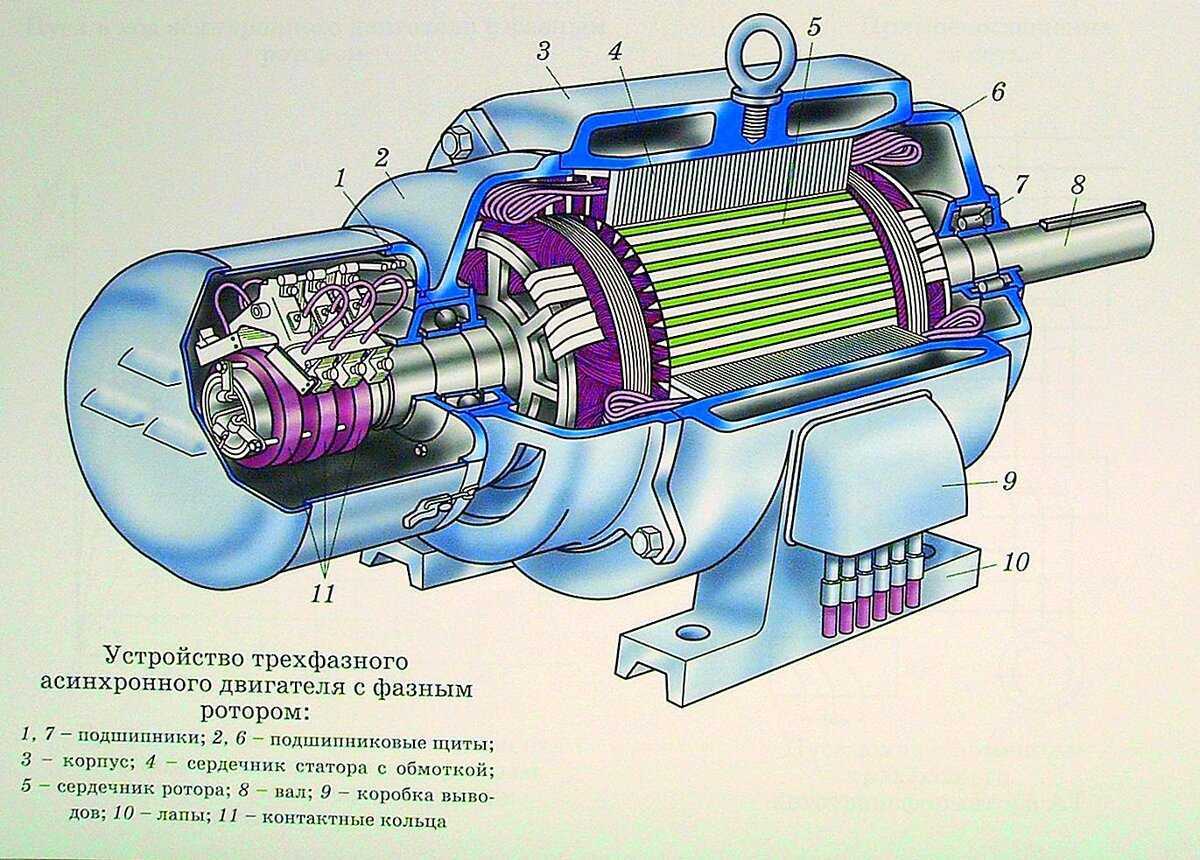
Фазный ротор асинхронного электродвигателя
Обмотка статора асинхронного двигателя с фазным ротором выполняется аналогично тому, как и на статорах асинхронных двигателей с короткозамкнутым ротором. И аналогичным путем создает, в зависимости от количества катушек (три, шесть, девять или более катушек), два, четыре и т. д. полюсов. Катушки статора сдвинуты между собой на 120, 60, 40 и т. д. градусов. При этом на фазном роторе делается столько же полюсов, сколько и на статоре.
Регулируя ток в обмотках ротора, регулируют рабочий момент двигателя и величину скольжения. Когда регулировочный реостат полностью выведен, то для уменьшения износа щеток и колец их закорачивают при помощи специального приспособления для подъема щеток.
Область применения
Асинхронный двигатель получил широкое распространение в качестве тягового, второстепенного и прочих видов силовых компонентов. Учитывая особенности его конструкции, отсутствие скользящих контактов, эксплуатация такого мотора намного проще. Также, схема подключения не требует сложных устройств управления, если говорить о простом режиме работы с постоянной частотой. Плюс ко всему и срок службы до сервисного обслуживания намного дольше, так как внутреннее пространство и обмотки не загрязняются графитом.
Применяется асинхронный электродвигатель во многих сферах:
- Системы вентиляции – благодаря выносливости и неприхотливости при эксплуатации моторы с короткозамкнутыми роторами достаточно часто используются в качестве вентиляторов. Они хорошо переживают продолжительную работу на максимальных оборотах, обеспечивая пользователей или технологическое оборудование интенсивным воздушным потоком.
- Конвейеры – благодаря высокому моменту, способности его поддерживать при нагрузках моторы асинхронного типа стали идеальным вариантом для реализации управления подвижными производственными линиями.
- Следящие системы и приводные устройства – особо часто применяют асинхронные двигатели в приводных системах на технологическом оборудовании. Но для организации управления таким типом двигателя потребуется особая схема подключения и частотный блок управления, а ротор асинхронного двигателя оснащается неодимовыми магнитами. Такие моторы рассчитаны на работы с частотой до 400 Гц.
- Бытовая сфера. Из такого мотора можно сделать различные рабочие агрегаты бытового назначения или для небольшой мастерской: вентилятор, управляемые заслонки, циркулярная пила, фуганок, прочее оборудование.
5.11. МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АСИНХРОННОГО ДВИГАТЕЛЯ
В последнем выражении для M1 единственным переменным параметром является скольжение S. Зависимость
М=f(S) получило название механической характеристики двигателя (рис. 5.11.1).
В момент пуска двигателя, когда n2=0, скольжение S=1, тогда:
.
Под действием момента Mn ротор придет во вращение. В дальнейшем скольжение будет уменьшаться,
а вращающий момент увеличиваться. При скольжении Sкр он достигает максимального
значения Mmax.. Величина критического скольжения
.
Тогда, подставив его значение в формулу для М, получим:
.
Дальнейший разгон двигателя
будет сопровождаться уменьшением скольжения и, вместе с тем уменьшением вращающего
момента. Равновесие наступит, когда величине вращающего момента будет противостоять
тормозной момент, вызванный нагрузкой.
При номинальной нагрузке будут номинальный вращающий момент Мн и номинальное скольжение Sн.
Отношение максимального момента к номинальному называется перегрузочной способностью двигателя.
.
Обычно она составляет величину от 1,7 до 2,5.
Отношение пускового момента к номинальному называется кратностью пускового момента
.
Эта величина может быть меньше единицы (например, 0,8) и больше ее (до 1,2). При меньшей кратности двигатель
следует включать в работу без нагрузки, и лишь после разгона подается нагрузка.
Двигатель с кратностью Кп.м.>1 можно включать в сеть с полной нагрузкой.
Какой ротор лучше, фазный или короткозамкнутый?
- Более-менее постоянная скорость вне зависимости от разных нагрузок
- Допустимость кратковременных механических перегрузок
- Простая конструкция, легкость пуска и автоматизации
- Более высокие cos φ (коэффициент мощности) и КПД, чем у электродвигателей с фазным ротором
- Трудности в регулировании скорости вращения
- Большой пусковой ток
- Низкий мощностной коэффициент при недогрузках
- Высокий начальный вращающий момент
- Допустимость кратковременных механических перегрузок
- Более-менее постоянная скорость при разных перегрузках
- Меньший пусковой ток, чем у двигателей с короткозамкнутым ротором
- Возможность использования автоматических пусковых устройств
- Большие габариты
- Коэффициент мощности и КПД ниже, чем у электродвигателей с короткозамкнутым ротором
Режимы работы
Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим — основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.






Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
-
Укажите главное отличие трав двулетников от однолетников 6 класс кратко
-
Типология глобальных проблем кратко
-
Счета бухгалтерского учета лекция кратко
-
Значение слова человек кратко
- Банджо история инструмента кратко
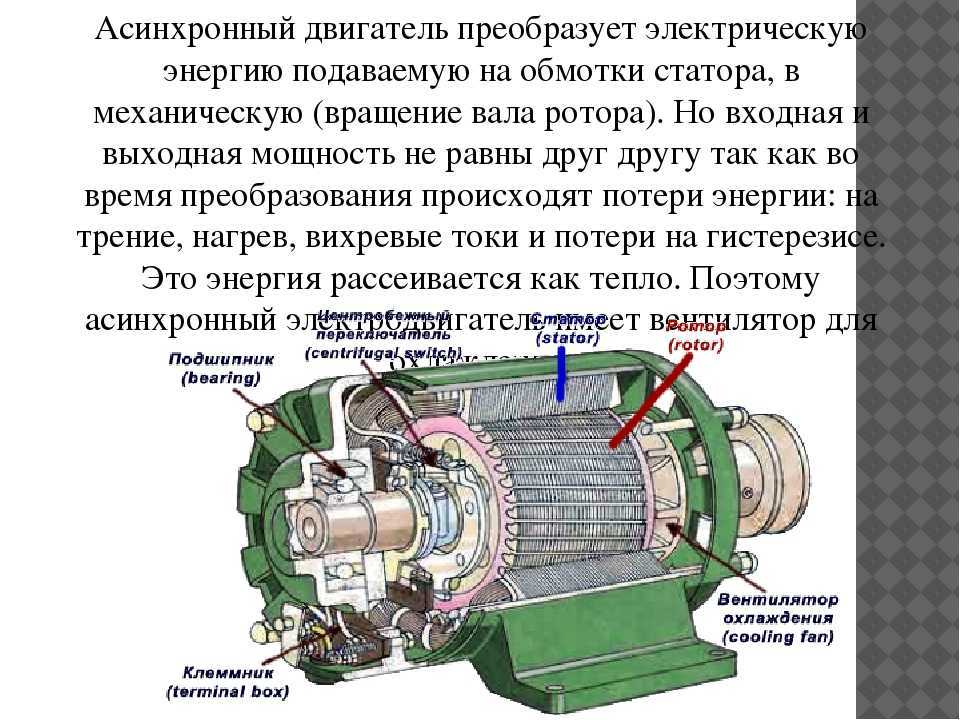
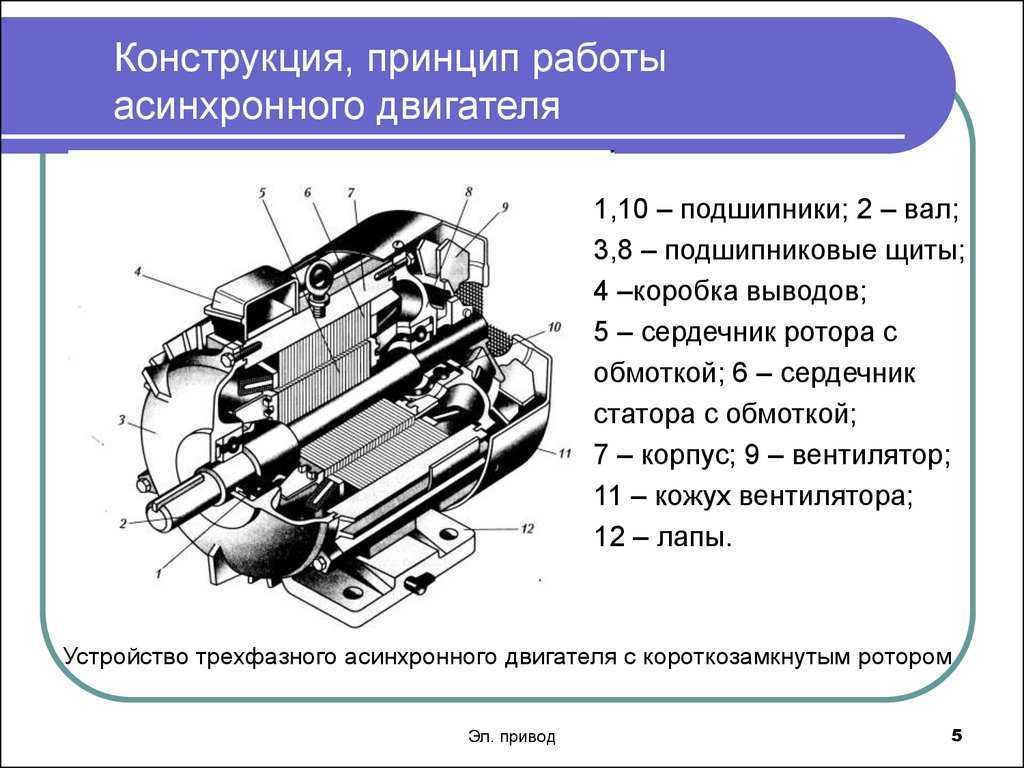
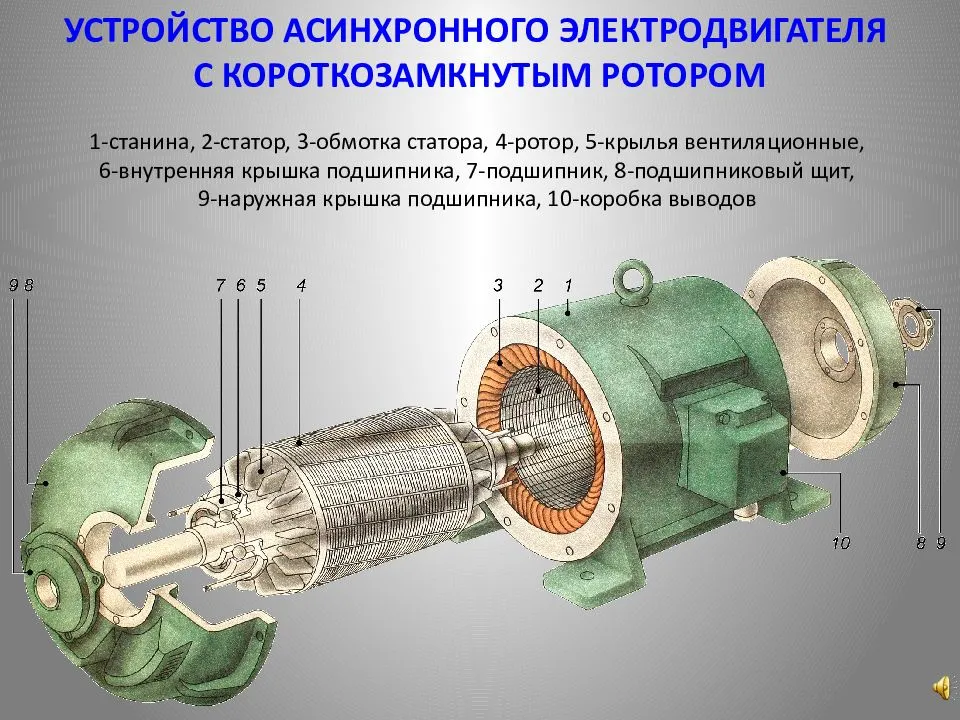
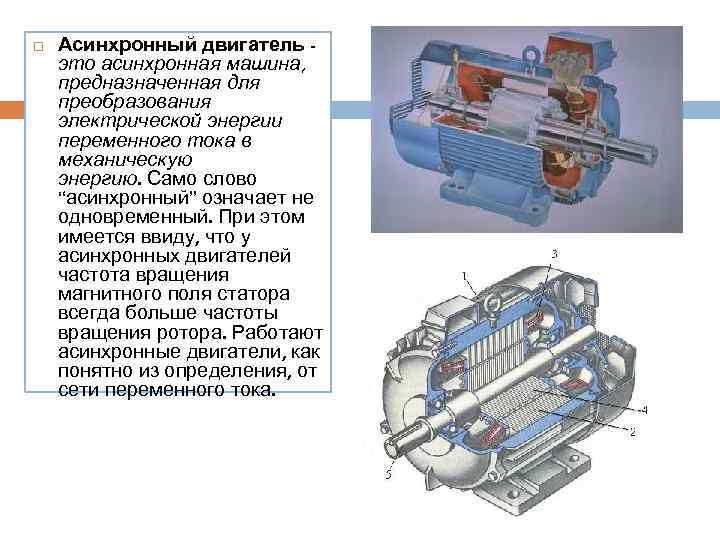
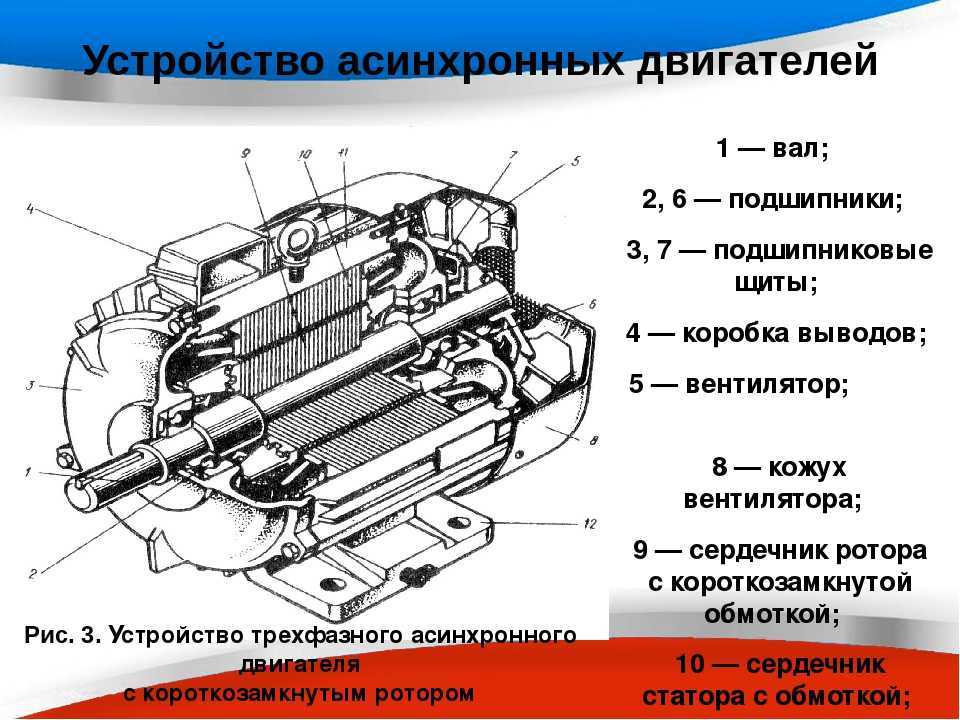
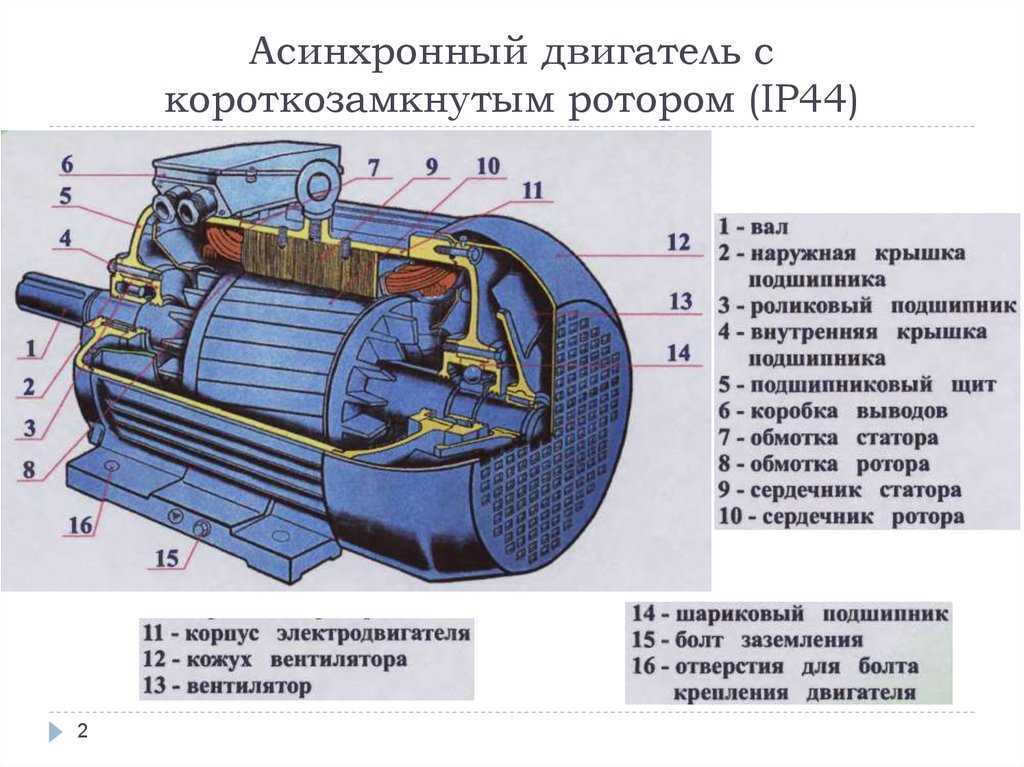
Устройство и принцип действия асинхронного двигателя
Главными компонентами асинхронного электродвигателя являются статор и ротор, которые отделены друг от друга воздушным зазором. Активную работу в двигателе выполняют обмотки и сердечник ротора.
Под асинхронностью двигателя понимают отличие частоты вращения ротора от частоты вращения электромагнитного поля.
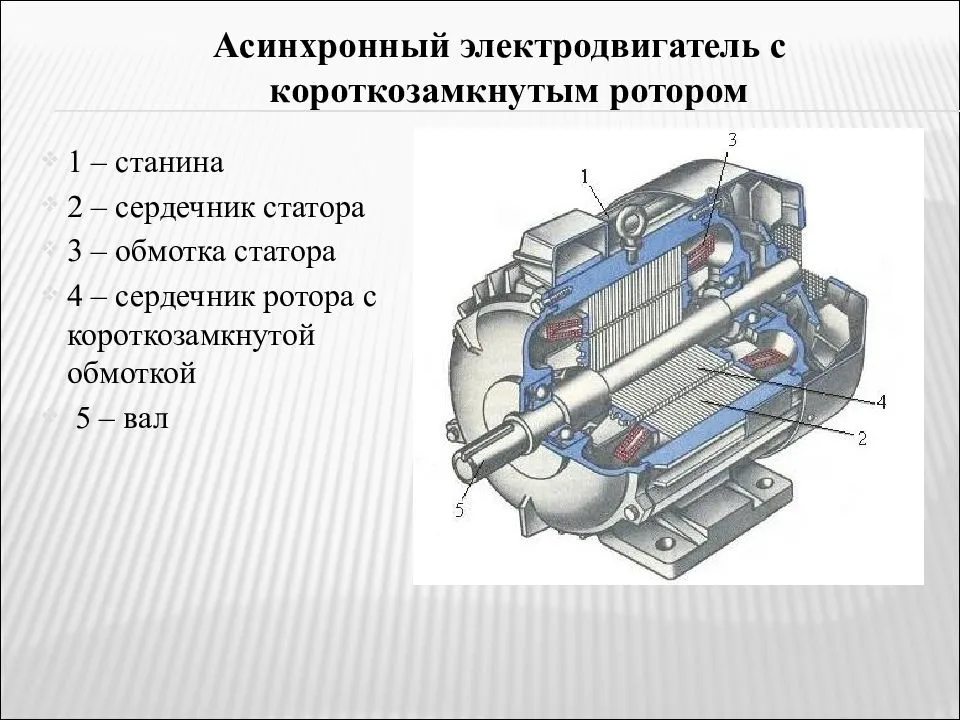
Ротор – это подвижная часть двигателя. Роторы асинхронных электродвигателей бывают двух видов: с короткозамкнутым и фазным роторами. Данные виды отличаются между собой конструкциями обмотки ротора.
Принцип действия
При подаче электрического тока на обмотки статора возникает магнитный поток. Так как фазы смещены относительно друг друга на 120 градусов, то из-за этого поток в обмотках вращается. Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле. Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Переключение — число — пары — полюс
| Механические характеристики двухскоростного асинхронного двигателя. |
Переключение числа пар полюсов достигается изменением схемы соединения статорной обмотки. Роторы многоскоростных двигателей выполняются короткозамкнутыми. На рис. 3 — 18 приведены механические характеристики двухскоростного двигателя. Переход с высшей скорости вращения на низшую при переключении числа пар полюсов, как показано на графике, сопровождается торможением с отдачей энергии в сеть. Механические характеристики сохраняют свою жесткость при переходе с одной скорости вращения на другую.
| Схема реверсирования трехфазного, асинхронного электродви гателя.| Механические характеристики трехфазного асинхронного электродвигателя при регулировании угловой скорости ротора изменением частоты переменного тока. |
Переключение числа пар полюсов асинхронных электродвигателей обеспечивает ступенчатое регулирование частоты вращения, жесткие механические характеристики и отличается экономичностью.
Переключение числа пар полюсов асинхронного электродвигателя дает ступенчатое регулирование скорости вращения, жесткие механические характеристики и отличается экономичностью.
Путем переключения числа пар полюсов можно изменять частоту вращения только большими ступенями, например: 3000, 1500, 1000, 500 об / мин. Возможность изменения числа пар полюсов в одном двигателе достигается усложнением его устройства, увеличением размеров и значительным повышением стоимости. Поэтому многоскоростные двигатели строят не более чем на четыре скорости.
| Переключение числа полюсов при различном соединении секций.| Включение Включение обмоток по схеме обмоток по схеме звезды двойной звезды.| Переключение обмоток с треугольника на двойную звезду. |
Возможность переключения числа пар полюсов путем изменения схемы обмотки иллюстрирует рис. 3.65. При соединении секций обмотки, как показано на рис. 3.65, а, получают четыре полюса, а по схеме рис. 3.65, б — два. Такие переключения производят в трех фазах, а переключаемые части обмоток могут соединяться параллельно или последовательно.
Регулирование переключением числа пар полюсов является сравнительно простым способом, не требующим больших капитальных затрат. Экономичность регулирования весьма высока. Скорость при регулировании меняется не плавно, а ступенями. Уменьшение синхронной скорости ниже 300 — 375 об / мин обычно не производится, так как оно приводит к значительному увеличению габаритов двигателей.
| Процесс регулирования скорости электродвигателя. |
Электродвигатели с переключением числа пар полюсов поля статора изготовляются на две, три и четыре скорости.
Регулирование скорости двигателей переключением числа пар полюсов возможно лишь в двигателе с короткозамкнутым ротором, так как только у этого двигателя число полюсов ротора всегда соответствует числу полюсов статора.
| Схема включения тепловых реле в обмотку статора двигателя, пуск которого осуществляется переключением звезды на треугольник. а-соединение в зоезду. b — в треугольник. |
У двигателей с переключением числа пар полюсов случается, что токи в подводящей линии и в самой обмотке при разной скорости вращения ротора значительно отличаются друг от друга.
Получение пониженной скорости путем переключения числа пар полюсов осуществляется в многоскоростном двигателе; при этом величина рабочей скорости определяется известным рядом синхронных скоростей: 3000, 1 500, 1 000, 750 и 500 об / мин. Двигатели со скоростями, меньшими 500 об / мин, редко изготовляются, следовательно, начальная скорость перед окончательным торможением может быть снижена максимум в 6 раз.