
Программирование 28BYJ-48 с помощью Arduino

Прежде всего, вам следует иметь четкое представление о концепции шагового двигателя, поэтому я рекомендую вам прочтите статью Hwlibre об этих предметах. Эти двигатели предназначены не для непрерывного питания, а для их поляризации в разных фазах, чтобы они продвигались только на желаемый градус. Чтобы возбуждать фазы и контролировать вращение вала, вам придется правильно питать каждое соединение.
| Шаг | Катушка А | Катушка B | Катушка C | Катушка D |
|---|---|---|---|---|
| 1 | ВЫСОКАЯ | ВЫСОКАЯ | LOW | LOW |
| 2 | LOW | ВЫСОКАЯ | ВЫСОКАЯ | LOW |
| 3 | LOW | LOW | ВЫСОКАЯ | ВЫСОКАЯ |
| 4 | ВЫСОКАЯ | LOW | LOW | ВЫСОКАЯ |
Чтобы возбуждать только одну катушку за раз и заставить ее работать в режиме волнового привода (даже при половинном, но низком потреблении) можно использовать следующую таблицу:
| Шаг | Катушка А | Катушка B | Катушка C | Катушка D |
|---|---|---|---|---|
| 1 | ВЫСОКАЯ | LOW | LOW | LOW |
| 2 | LOW | ВЫСОКАЯ | LOW | LOW |
| 3 | LOW | LOW | ВЫСОКАЯ | LOW |
| 4 | LOW | LOW | LOW | ВЫСОКАЯ |
Или для авансов полушага, вы можете использовать это для достижения большей точности точения за более короткие шаги:
| Шаг | Катушка А | Катушка B | Катушка C | Катушка D |
|---|---|---|---|---|
| 1 | ВЫСОКАЯ | LOW | LOW | LOW |
| 2 | ВЫСОКАЯ | ВЫСОКАЯ | LOW | LOW |
| 3 | LOW | ВЫСОКАЯ | LOW | LOW |
| 4 | LOW | ВЫСОКАЯ | ВЫСОКАЯ | LOW |
| 5 | LOW | LOW | ВЫСОКАЯ | LOW |
| 6 | LOW | LOW | ВЫСОКАЯ | ВЫСОКАЯ |
| 7 | LOW | LOW | LOW | ВЫСОКАЯ |
| 8 | LOW | LOW | LOW | ВЫСОКАЯ |
И вы можете подумать … какое это имеет отношение к программированию Arduino? Ну правда в том, что много, так как вы можете создать матрицу или массив со значениями в Arduino IDE чтобы двигатель двигался так, как вы хотите, а затем используйте указанный массив в цикле или когда вам это нужно ..
Принимая во внимание, что LOW = 0 и HIGH = 1, то есть отсутствие напряжения или высокого напряжения, вы можете создать сигналы, которые Arduino вы должны отправить контроллеру для управления двигателем. Например, чтобы сделать средние шаги, вы можете использовать код для матрицы:
int Paso =
{ {1, 0, 0, 0},
{1, 1, 0, 0},
{0, 1, 0, 0},
{0, 1, 1, 0},
{0, 0, 1, 0},
{0, 0, 1, 1},
{0, 0, 0, 1},
{1, 0, 0, 1} };
То есть для полный код скетча В среде Arduino IDE вы можете использовать этот базовый пример, чтобы проверить, как работает шаговый двигатель 28BYJ-48. С его помощью вы сможете вращать вал двигателя, как только вы правильно подключите всю схему. Попробуйте изменить значения или код приложения, которое вам нужно в вашем случае:
// Definir pines conectados a las bobinas del driver
#define IN1 8
#define IN2 9
#define IN3 10
#define IN4 11
// Secuencia de pasos a par máximo del motor. Realmente es una matriz que representa la tabla del unipolar que he mostrado antes
int paso =
{
{1, 1, 0, 0},
{0, 1, 1, 0},
{0, 0, 1, 1},
{1, 0, 0, 1}
};
void setup()
{
// Todos los pines se configuran como salida, ya que el motor no enviará señal a Arduino
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
// Bucle para hacerlo girar
void loop()
{
for (int i = 0; i < 4; i++)
{
digitalWrite(IN1, paso);
digitalWrite(IN2, paso);
digitalWrite(IN3, paso);
digitalWrite(IN4, paso);
delay(10);
}
}
Как видите, в этом случае он работал бы с максимальным крутящим моментом, активируя катушки по две …
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
| Шаговый двигатель Nema17 42BYGH 1.7A (17HS4401-S) для 3D принтера | Набор из 5 шаговых двигателей ULN2003 28BYJ-48 с платам драйверов для Ардуино | Шаговый двигатель с модулем драйвера 5V Stepper Motor 28BYJ-48 + ULN2003 |
| Еще один вариант шагового двигателя для Arduino 28BYJ-48 5V 4 Phase DC Motor + ULN2003 Drive Test Board | Набор из трех шаговых двигателей Nema17 Stepper Motor 42BYGH 1.7A (17HS4401) для 3D приентера | AliExpress.com Product – 3D Printer Parts StepStick A4988 DRV8825 Stepper Motor Driver With Heat sink Carrier Reprap RAMPS 1.4 1.5 1.6 MKS GEN V1.4 board |
Общие принципы работы шаговых двигателей
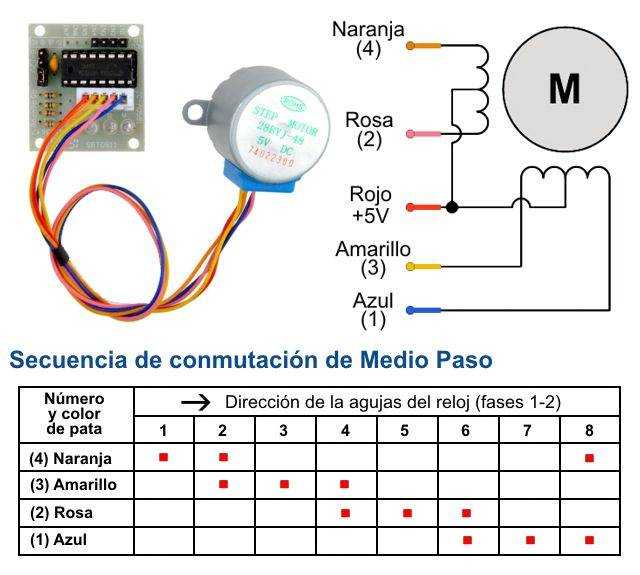
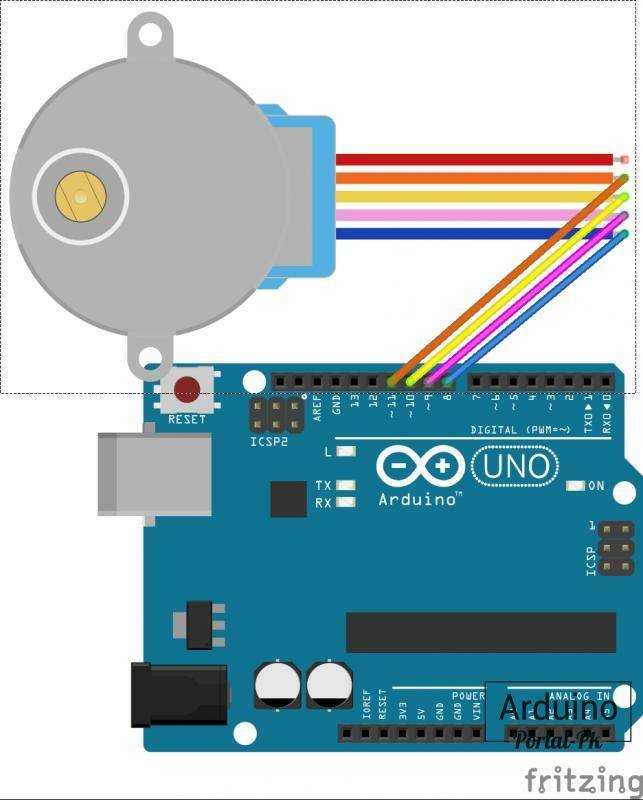
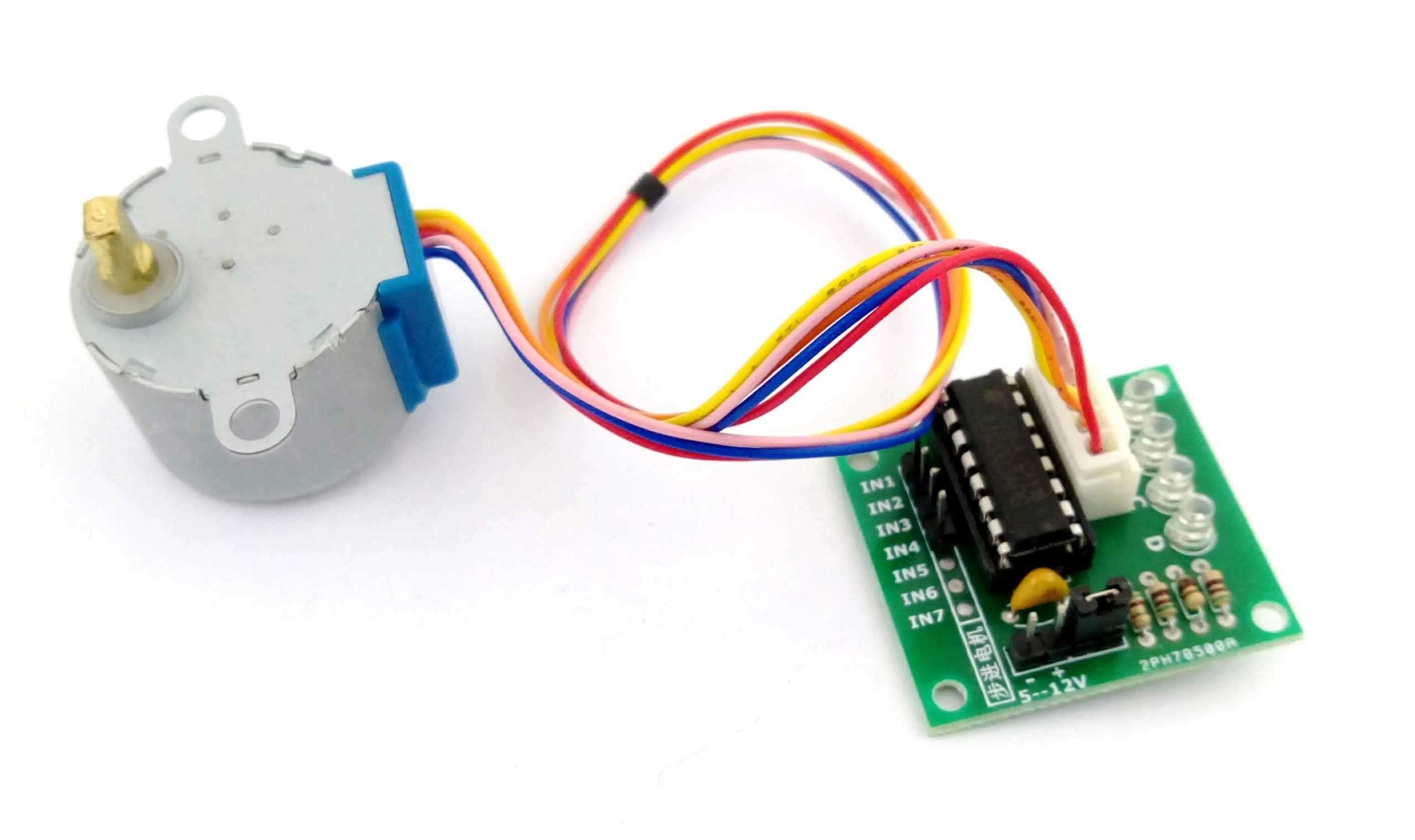
Внешний вид шагового двигателя 28-BYJ48 (купить на AliExpress) представлен на следующем рисунке:

Первый вопрос, который напрашивается при взгляде на этот рисунок – почему в отличие от обычного двигателя из этого шагового двигателя выходят 5 проводов различных цветов? Чтобы понять это давайте сначала разберемся с принципами работы шагового двигателя.
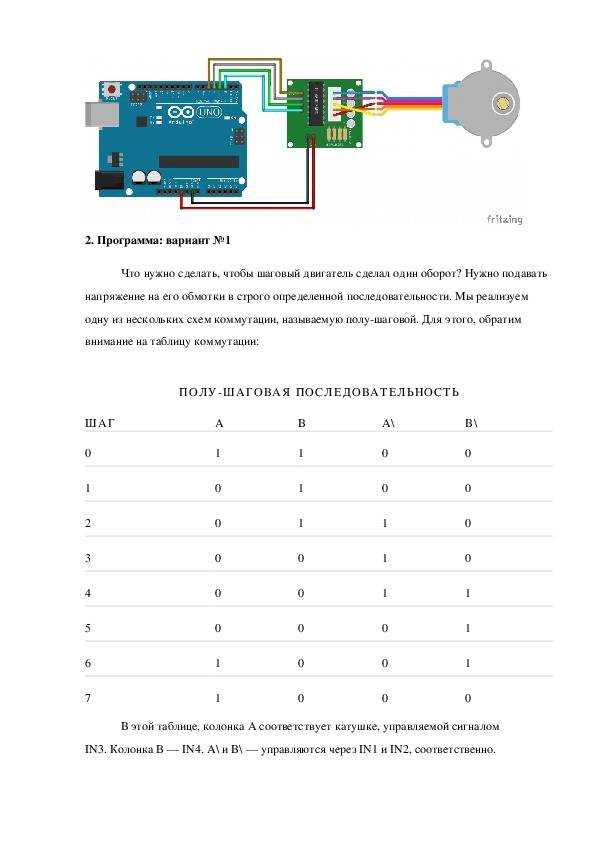
Начнем с того, что шаговые двигатели не вращаются, а “шагают”, поэтому они и называются шаговыми двигателями. То есть в один момент времени они будут передвигаться только на один шаг. Чтобы добиться этого в устройстве шаговых двигателей присутствует несколько катушек и на эти катушки нужно подавать питание в определенной последовательности чтобы двигатель вращался (шагал). При подаче питания на каждую катушку двигатель делает один шаг, при последовательной подаче питания на катушки двигатель будет совершать непрерывные шаги, то есть вращаться. Давайте более подробно рассмотрим катушки, присутствующие внутри шагового двигателя.
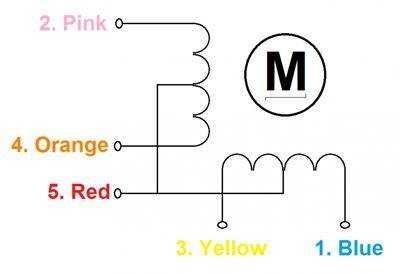 Как можно видеть из рисунка, двигатель имеет однополярную катушку с 5 выводами. Но фактически это 4 катушки, на которые нужно подавать питание в определенной последовательности. На красные провода необходимо подать +5V, на остальные 4 провода необходимо подать землю чтобы запустить в работу соответствующую катушку. Мы будем использовать плату Arduino чтобы подавать питание на эти катушки в определенной последовательности и тем самым заставлять двигатель вращаться. Более подробно ознакомиться с принципами работы шаговых двигателей можно в статье про подключение шагового двигателя к микроконтроллеру AVR.
Как можно видеть из рисунка, двигатель имеет однополярную катушку с 5 выводами. Но фактически это 4 катушки, на которые нужно подавать питание в определенной последовательности. На красные провода необходимо подать +5V, на остальные 4 провода необходимо подать землю чтобы запустить в работу соответствующую катушку. Мы будем использовать плату Arduino чтобы подавать питание на эти катушки в определенной последовательности и тем самым заставлять двигатель вращаться. Более подробно ознакомиться с принципами работы шаговых двигателей можно в статье про подключение шагового двигателя к микроконтроллеру AVR.
Так почему же этот двигатель называется 28-BYJ48? Честно говоря, мы не знаем точного ответа на этот вопрос. Некоторые наиболее важные технические характеристики этого шагового двигателя приведены на следующем рисунке.
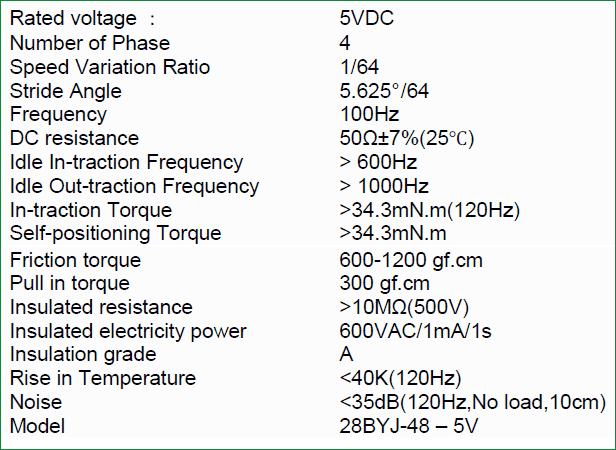
На первый взгляд от такого количества характеристик может закружиться голова, но давайте попробуем выделить из них самые важные, те, которые нам понадобятся для дальнейшей работы. Во-первых, мы знаем, что это шаговый двигатель 5V, поэтому необходимо подавать на красный провод 5V. Также мы знаем что это четырехфазный шаговый двигатель поскольку в нем четыре катушки. Передаточное число этого двигателя — 1: 64. Это означает, что вал, который вы видите снаружи, сделает одно полное вращение в том случае, когда двигатель внутри сделает 64 оборота. Это происходит благодаря шестерням, которые включены между двигателем и выходным валом. Эти шестерни помогают в увеличении крутящего момента.
Еще одним важным показателем, который нам следует знать, является угол шага: 5.625°/64. Это значит что когда двигатель сделает последовательность в 8 шагов он будет поворачиваться на 5.625° при каждом шаге и за один полный оборот он сделает 64 шага (5.625*64=360).
Расчет шагов на оборот для шагового двигателя
Важно знать, как рассчитать количество шагов за один оборот для вашего шагового двигателя, потому что только тогда вы можете эффективно его запрограммировать. В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°. Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25)
Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25)
В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°. Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25).
Справедлива следующая формула:
Количество шагов за оборот = 360 / угол шага.
В нашем случае 360/11.25 = 32 шага за оборот.
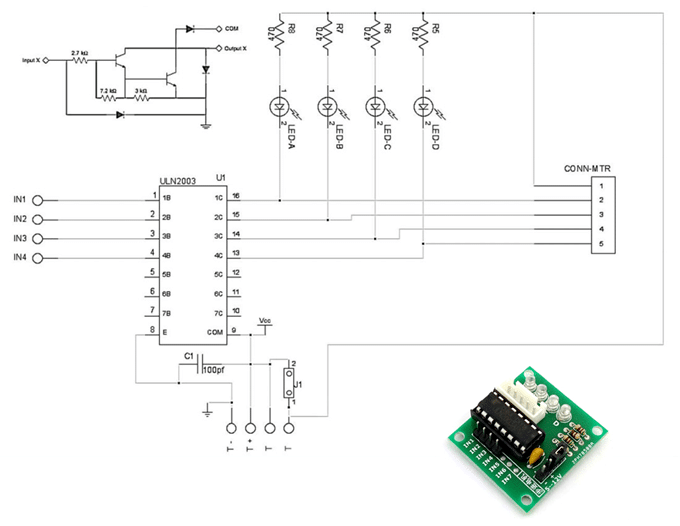
Зачем нужен драйвер мотора для управления шаговым двигателем
Большинство шаговых двигателей будут работать только с помощью модуля драйвера мотора. Это связано с тем, что микроконтроллер (в нашем случае плата Arduino) не может обеспечить достаточный ток на своих контактах ввода/вывода для работы двигателя. Поэтому мы будем использовать внешний драйвер мотора для управления нашим шаговым двигателем — модуль ULN2003 (купить на AliExpress). В сети интернет можно найти рейтинги эффективности различных драйверов мотора, но эти рейтинги будут меняться в зависимости от типа используемого шагового двигателя. Основной принцип, которого следует придерживаться при выборе драйвера мотора – он должен обеспечивать достаточный ток для управления шаговым двигателем.
The 28BYJ-48 Stepper Motor
The 28BYJ-48 is a 5-wire unipolar stepper motor that runs on 5V. It’s perfect for projects that require precise positioning, like opening and closing a vent.

Because the motor does not use contact brushes, it has a relatively precise movement and is quite reliable.
Despite its small size, the motor delivers a decent torque of 34.3 mN.m at a speed of around 15 RPM. It provides good torque even at a standstill and maintains it as long as the motor receives power.
The only drawback is that it is somewhat power-hungry and consumes energy even when it is stationary.
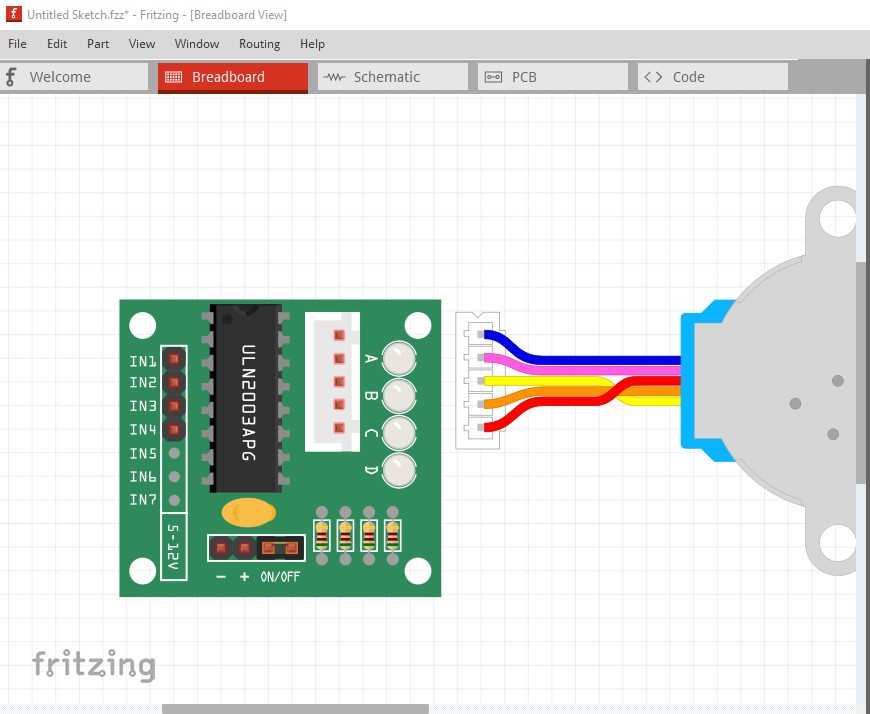
Pinout
The 28BYJ-48 stepper motor has five wires. The pinout is as follows:
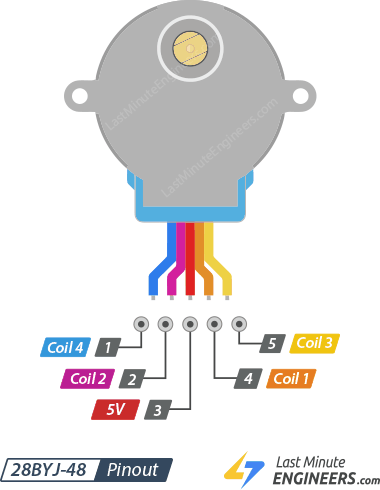
The 28BYJ-48 has two coils, each of which has a center tap. These two center taps are connected internally and brought out as the 5th wire (red wire).
Together, one end of the coil and the center tap form a Phase. Thus, 28BYJ-48 has a total of four phases.
The red wire is always pulled HIGH, so when the other lead is pulled LOW, the phase is energized.
The stepper motor rotates only when the phases are energized in a logical sequence known as a step sequence.
Gear Reduction Ratio
According to the data sheet, when the 28BYJ-48 motor is operated in full-step mode, each step corresponds to a rotation of 11.25°. This means there are 32 steps per revolution (360°/11.25° = 32).
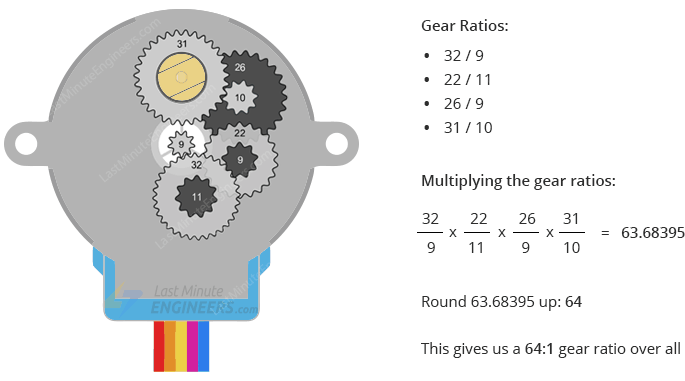
In addition, the motor features a 1/64 reduction gear set (actually, it is 1/63.68395, but 1/64 is a good enough approximation for most purposes).
This means that there are in fact 2038 steps (32*63.68395 steps per revolution = 2037.8864 approximately 2038 steps).
Power Consumption
The 28BYJ-48 typically draws about 240 mA.
Because the motor consumes a significant amount of power, it is preferable to power it directly from an external 5V power supply rather than from the Arduino.
It is worth noting that the motor consumes power even when it is at rest in order to maintain its position.
Technical Specifications
Here are the specifications:
| Operating Voltage | 5VDC |
| Operating Current | 240mA (typical) |
| Number of phases | 4 |
| Gear Reduction Ratio | 64:1 |
| Step Angle | 5.625°/64 |
| Frequency | 100Hz |
| In-traction Torque | >34.3mN.m(120Hz) |
| Self-positioning Torque | >34.3mN.m |
| Friction torque | 600-1200 gf.cm |
| Pull in torque | 300 gf.cm |
For more information, please refer to the datasheet below.
Что такое шаговый двигатель?
Прежде чем перейти к статье, давайте сразу договоримся, что статья не направлена на специалистов, а её цель – донести любознательным любителям техники и технологий о таком устройстве, как шаговый двигатель и об основах работы с ними. Поэтому умников и критиков, жаждущих поговорить о великом многообразии управляемого и регулируемого электропривода, прошу идти общаться на тематические ресурсы по ЧПУ-станкам и 3D-принтерам.
Итак, для начала сформулируем определение. Согласно Википедии: «Шаговый электродвигатель — синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора».
Формулировка достаточно понятна, но её последнее предложение может вызвать некоторое недопонимание. Поэтому я предлагаю провести небольшое сравнение.
Всем известно что ротор «обычного» электродвигателя, будь то асинхронного, синхронного, коллекторного или любого другого будет вращаться до тех пор, пока на него подают напряжение питания, и после отключения питания он будет вращаться еще какое-то время по инерции, если же не используются какие-либо средства для его торможения.
Ротор такого двигателя вращается просто вокруг своей оси без каких-либо ограничений, на 360 градусов, и остановится он в любом месте. Зафиксировать его положением можно только механически (тормозом). По этой причине не получится добиться точного позиционирования исполнительных механизмов, что требуется в робототехнике, ЧПУ-станках и другом автоматизированном оборудовании.
Но шаговые двигатели разработаны для применения в механизмах, где детали поворачиваются точно на требуемый угол.
В приведенном выше определении было сказано «…вызывает дискретные угловые перемещения (шаги) ротора…» — это значит, что ротор шагового двигателя не вращается в обычном понимании, а поворачивается на какой-то определенный, «дискретный» угол. Этот угол называется шагом, отсюда и название «шаговый двигатель». Мне нравится еще одно название этих устройств — «двигатель с конечным числом положений ротора».
Питание такого двигателя невозможно без системы управления, или как его еще называют, драйвера — он подаёт импульсы в нужные обмотки, чтобы повернуть ротор на нужный угол. Это наглядно иллюстрирует приведенная ниже анимация.
Кроме того, что можно поворачивать двигатель на определенный угол и фиксировать его в этом положении, делать это всё можно без схемы обратной связи (датчиков положения и прочего).
Рассматривать типы шаговых двигателей в пределах этой статьи мы не будем, лишь кратко перечислим, какими они бывают. По конструкции:
- Реактивные.
- С постоянными магнитами.
- Гибридные.
По способу питания:
- Униполярные (однополярные — ток пропускают через обмотки только в одну сторону).
- Биполярные (ток пропускают через обмотки в обе стороны). Здесь драйвер должен подавать напряжение различной полярности, что несколько усложняет схемотехнику. При тех же размерах развивают бОльшую мощность по сравнению с униполярными.
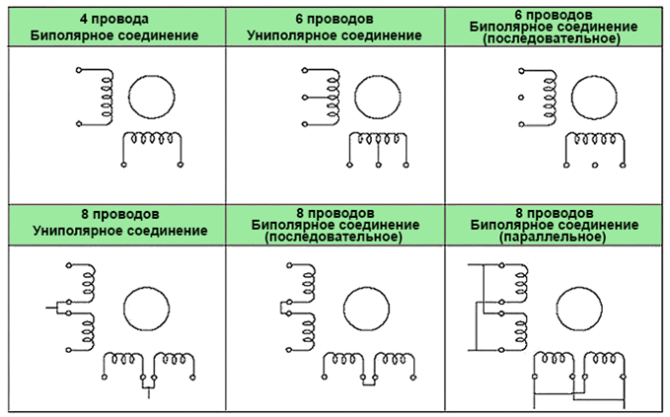
В униполярном двигателе зачастую 5 проводов — 1 общий, от середины каждой из двух обмоток, и 4 от концов обмоток. Иногда говорят «4 обмотки» – это также правильно, поскольку фактически мы получаем 4 обмотки соединенных в общей точки.

Также ШД могут отличаться и по количеству проводов, это зависит от того, как соединены обмотки и какое питание предполагается, некоторые варианты вы видите в таблице ниже.
Управление шаговым двигателем
Различают два способа управления шаговым двигателем:
- Полношаговое. Одновременно включается только пара обмоток (без перекрытия с другими). Достигается максимальный момент на валу, но точность установления угла меньше, чем в других способах.
- Полушаговое. В этом случае увеличивается количество шагов, соответственно повышается точность установки положения вала. На каждый первый шаг включается одна обмотка, на каждый второй шагами (полушаг) – пара обмоток. Но когда включена одна обмотка момент на валу снижается вдвое.
На анимациях ниже наглядно продемонстрировано
Полношаговое управление
Полушаговое управление
В некоторых источниках отдельно обозначают микрошаговое управление. Используется, когда необходимо максимальное количество шагов и точность управления. По способу управления оно похоже на полушаговый режим, между шагами включаются две обмотки, а отличие в том, что токи в них распределяются не равномерно. Главный недостаток такого подхода — усложняется коммутация (система управления).
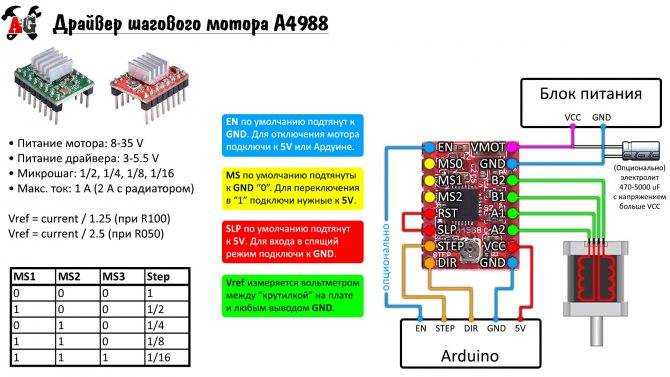
Настройка тока DRV8825.
Перед использованием мотора нужно сделать небольшую настройку, необходимо ограничить максимальную величину тока, протекающего через катушки шагового двигателя, и ограничить его превышение номинального тока двигателя, регулировка осуществляется с помощью небольшого потенциометра.
 Для настройки необходимо рассчитать значение напряжения Vref.
Для настройки необходимо рассчитать значение напряжения Vref.
Vref = Current Limit / 2
где,
Current Limit — номинальный ток двигателя.
Для примера рассмотрим двигатель NEMA 17 17HS4401 с током 1,7 А.
Vref = 1,7 / 2 = 0,85 В.
Осталось только настроить, берем отвертку и вольтметр, плюсовый щуп вольтметра устанавливаем на потенциометр, а щуп заземления на вывод GND и выставляем нужное значение.
Подключение драйвера шагового двигателя DRV8825 к Arduino UNO.
Подключим двигатель DRV8825 к Arduino UNO по схеме.

Для этого подключаем GND LOGIC к GND на Arduino. Контакты DIR и STEP подключим к цифровым контактам 2 и 3 на Arduino. Подключение шагового двигателя к контактам B2, B1, A2 и A1.


Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению.
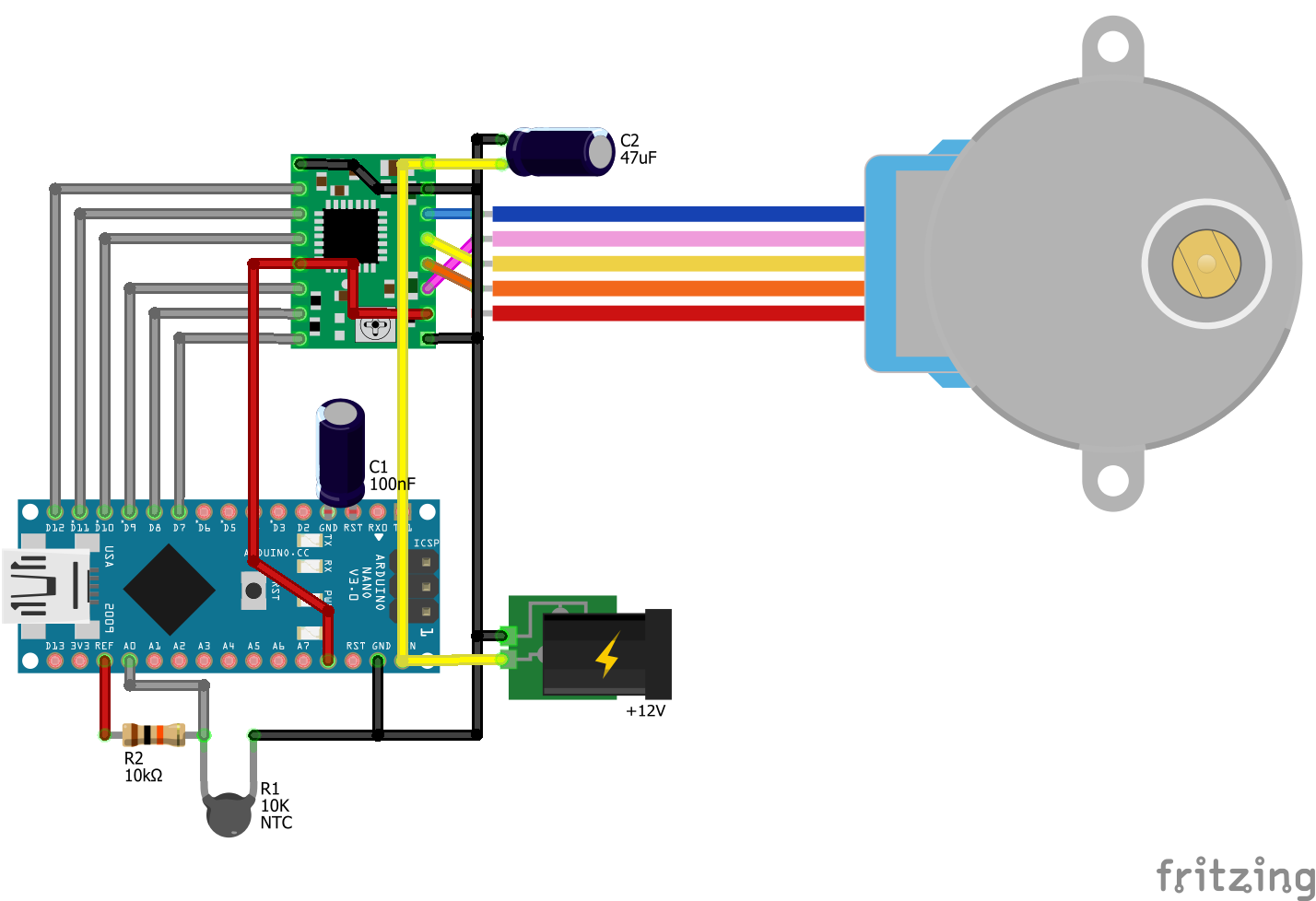
Затем необходимо подключить контакт RST к соседнему контакту SLP к 5В на Arduino, чтобы включить драйвер. А контакты выбора микрошага необходимо оставить не подключенными, чтобы работал режим полный микрошаг. Теперь осталось подключить питание двигателя к контактам VMOT и GND MOT, главное не забудьте подключить электролитический конденсатор на 100 мкФ к контактам питания двигателя. В противном случае, при скачке напряжения модуль может выйти из строя.
Скетч вращения шагового двигателя NEMA 17, драйвер DRV8825.
Как уже было упомянуто выше, драйвер DRV8825 заменим драйвером A4988, поэтому и код вращения двигателем можно взять из предыдущей статьи: Драйвер шагового двигателя A4988. Но для увеличения кругозора сегодня будем использовать код вращения двигателя nema 17 без использования библиотеки.
const int dirPin = 2;
const int stepPin = 3;
const int stepsPerRevolution = 200;
void setup()
{
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
}
void loop()
{
digitalWrite(dirPin, HIGH); // Установка вращения по часовой стрелки
for(int x = 0; x > stepsPerRevolution; x++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite(stepPin, LOW);
delayMicroseconds(2000);
}
delay(1000);
digitalWrite(dirPin, LOW); // Установка вращения против часовой стрелки
for(int x = 0; x < stepsPerRevolution; x++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(1000);
digitalWrite(stepPin, LOW);
delayMicroseconds(1000);
}
delay(1000);
}
Описание скетча:
Для работы данного скетча, не требуется никаких библиотек. Программа начинается с определения выводов Arduino, к которым подключены выводы STEP и DIR. Так же указываем stepsPerRevolution количество шагов на оборот.
В функции void setup() указываем управляющие контакты как выход.
В основной функции void loop(), вращаем двигатель по часовой стрелке, затем против, с разной скоростью.
Подробнее о подключении шаговых двигателей к Ardiono смотрите на сайте Ардуино технологии.
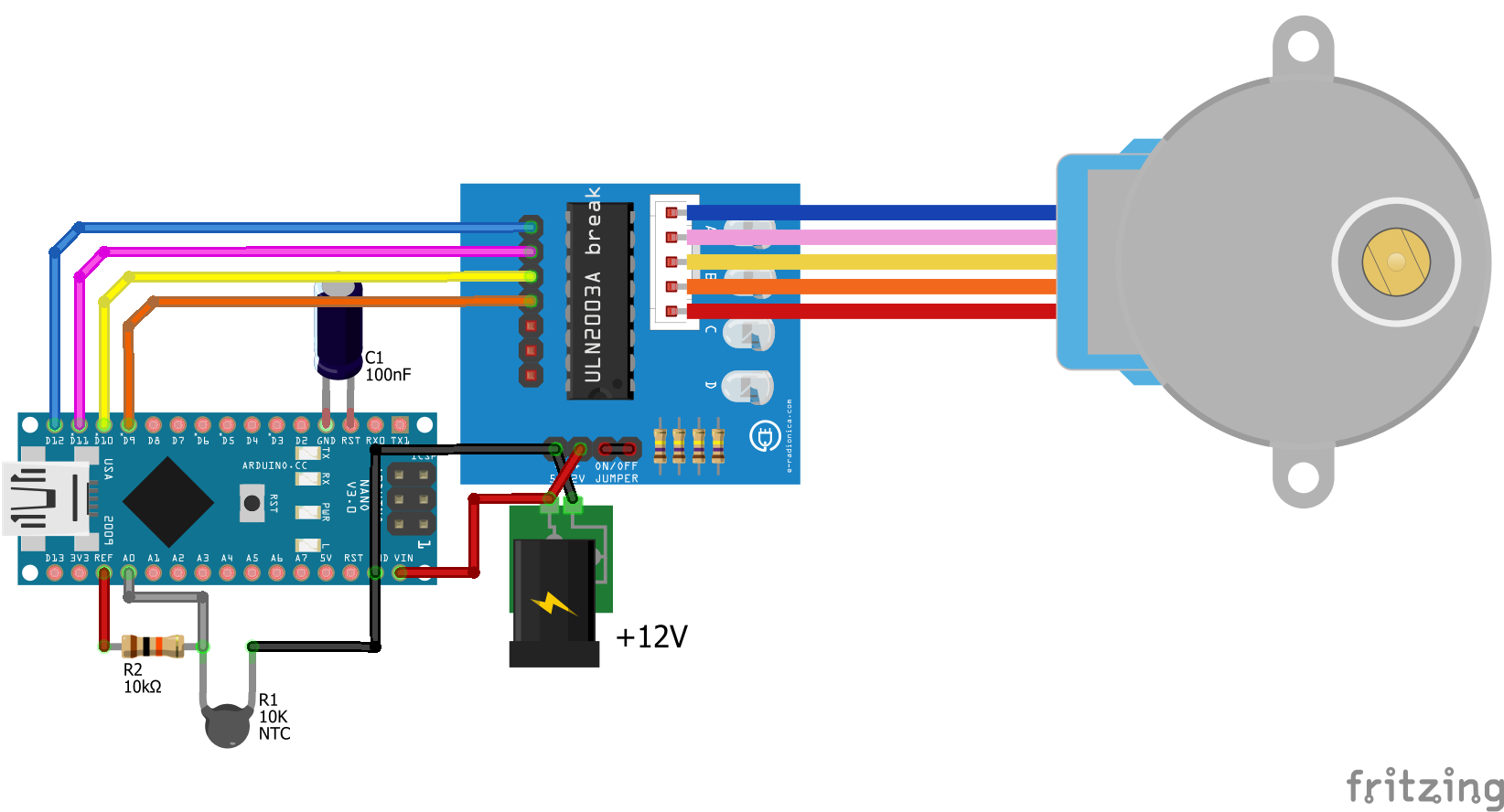
Для более простого подключения шагового двигателя к Arduino или другому микроконтроллеру существуют модули. Модули бывают разные, на фото ниже приведен пример двух различных модулей.

Распиновку и как подключать модуль драйвера DRV8825 будем рассматривать в следующей статье.
Использование драйвера DRV8825 с CNC shield v3.
Драйвер DRV8825 можно установить на CNC shield v3. CNC shield используются для управления ЧПУ станками и облегчают сборку электроники.

Данный набор позволяет без пайки собрать электронику для двух осевых, трех осевых, четырех осевых ЧПУ станков, а также для самостоятельной сборки 3D принтеров. При реализации ЧПУ станков данные шилды используются достаточно часто благодаря своей низкой цене и простоте сборки. Более подробно CNC shield v3 будем рассматривать в следующих статьях.
Вывод можно сделать следующий. Драйвер DRV8825 обладает рядом преимуществ перед драйвером A4988. А также, при использовании драйвера шагового двигателя DRV8825, меньше шума от шаговых двигателей. Это актуально при сборке лазерного гравера, 3D принтера. Когда при работе главный источник шума – это механика и гул шаговых двигателей.
Понравился статья Драйвер шагового двигателя DRV8825? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу , в группу на .
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье
Файлы для скачивания
Скачивая материал, я соглашаюсь с Правилами скачивания и использования материалов.
| drv8825-datasheet.pdf | 743 Kb | 950 | Скачать |
БИБЛИОТЕКА ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ ARDUINO
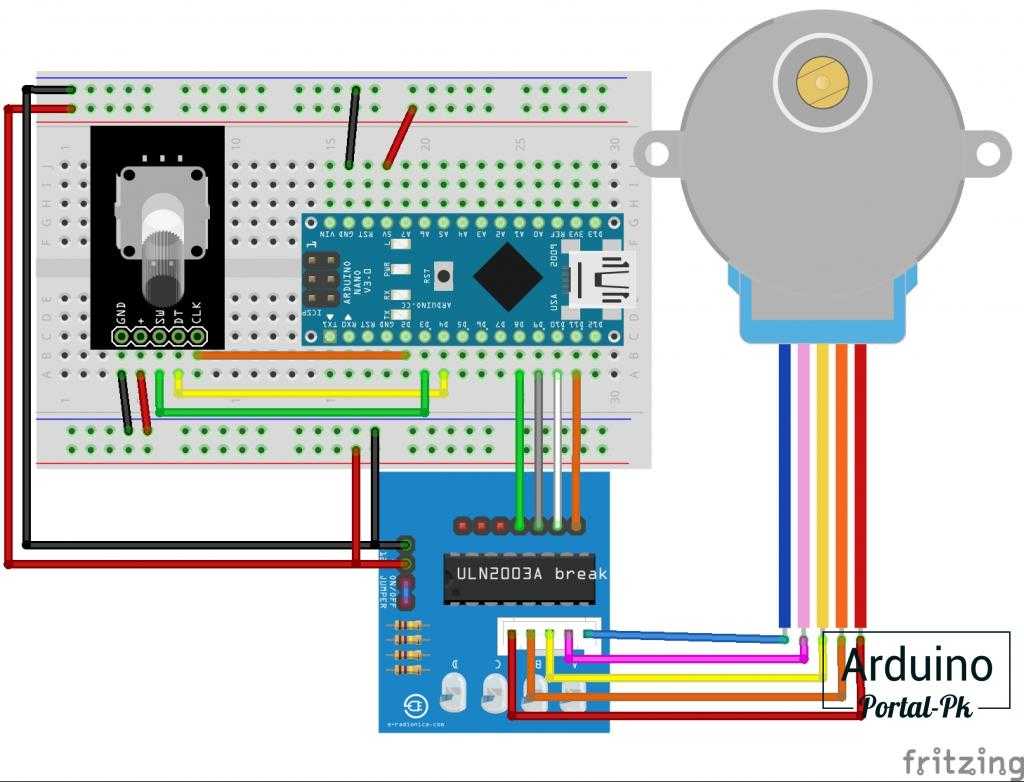
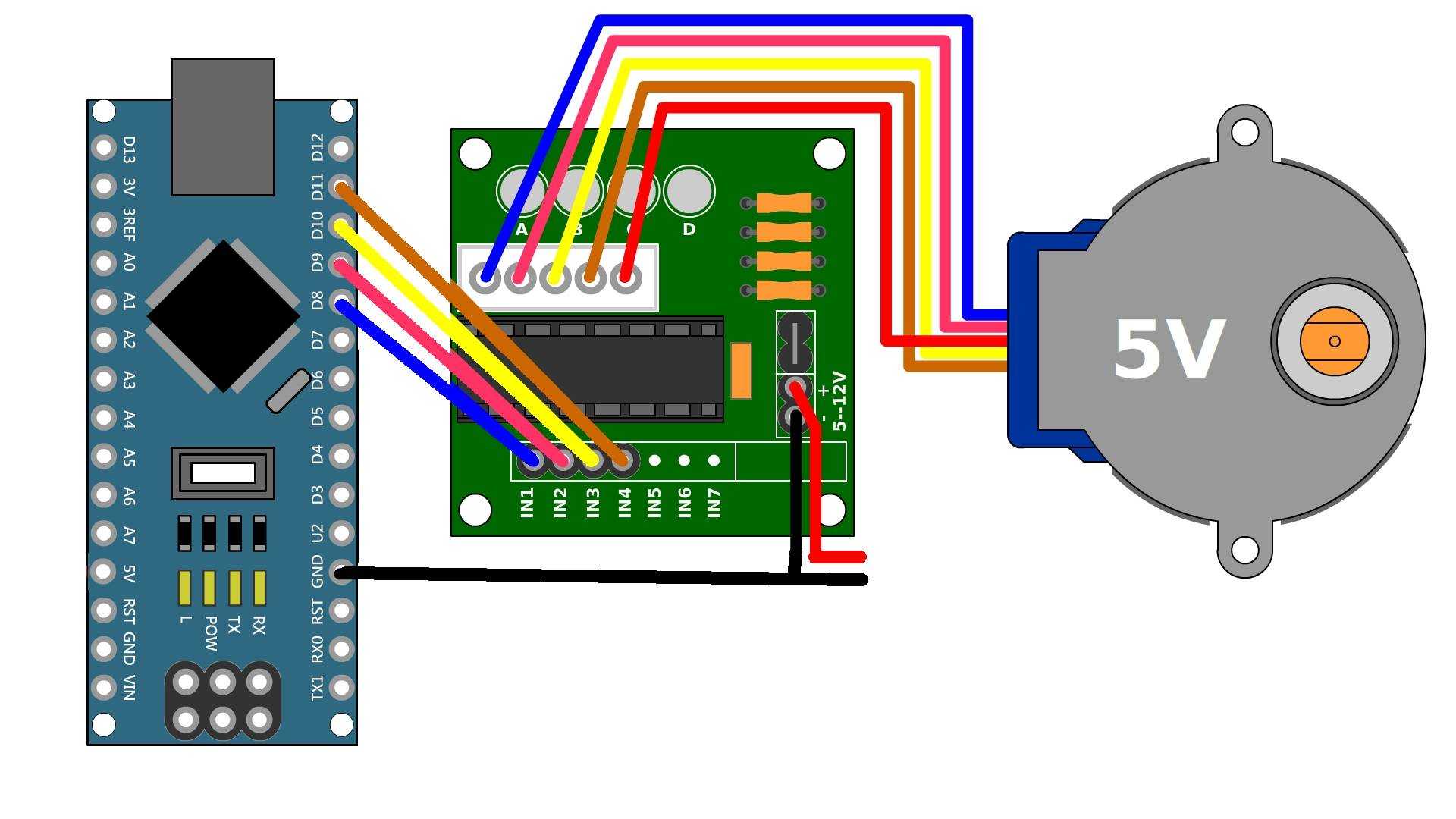
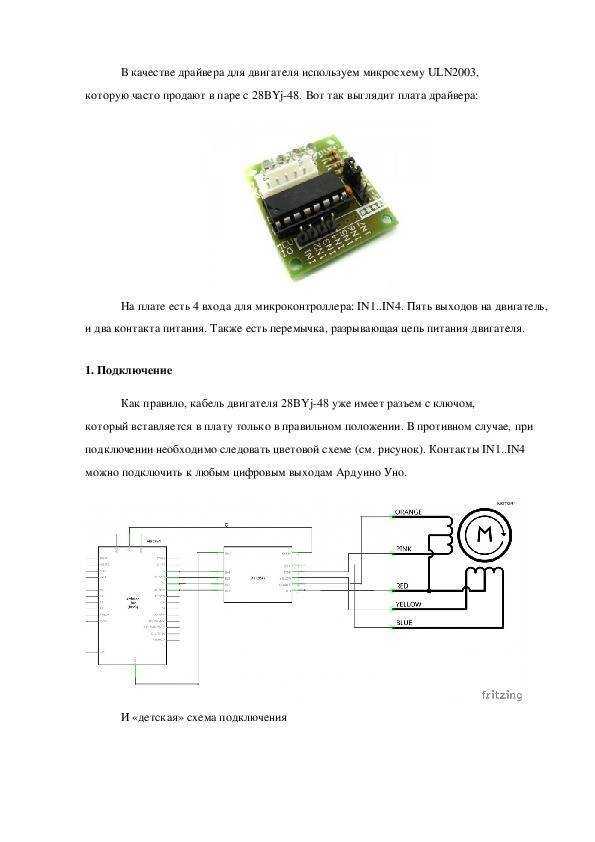
Для подключения шаговых моторов к Arduino нужно использовать драйверы. Очень дешёвые и популярные моторы 28byj-48-5v часто продаются вместе со своим драйвером (транзисторная сборка ULN2003), подключить можно к любым 4-м пинам Ардуино и использовать.
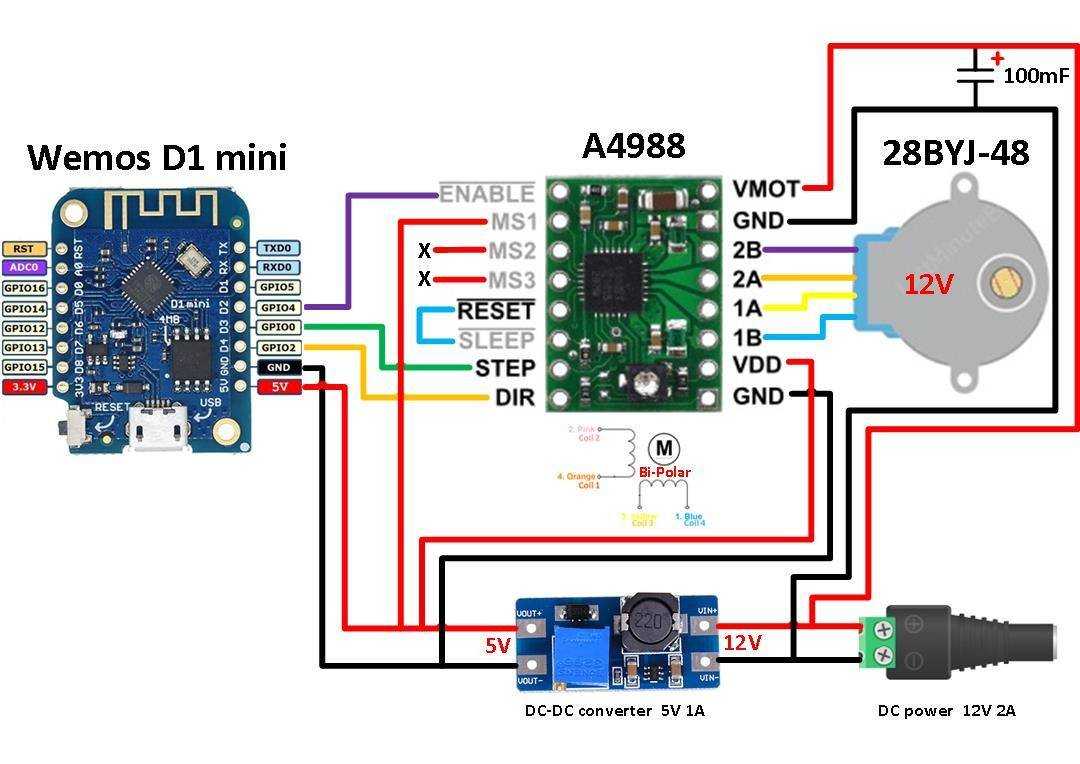
Для работы с большими шаговиками (типа Nema 17) нужно использовать специализированные драйверы, ниже вы найдёте описания и схемы подключения для A4988, DRV8825 и TMC2208, драйверы такого формата подключаются и работают практически одинаково, т.к. разработаны для CNC шилдов и взаимозаменяемы. У этих драйверов нужно настроить ток при помощи крутилки на плате. Это можно сделать “на глаз”, заставив мотор вращаться и регулируя крутилку. Мотор должен вращаться, но не вибрировать как перфоратор и сильно не нагреваться. Лучше настроить ток по опорному напряжению Vref, у каждого драйвера оно считается по своей формуле (см. картинки ниже). Берём ток своего мотора из описания, подставляем в формулу вместо current, считаем, и накручиваем полученное напряжение крутилкой. Для измерения опорного напряжения нужно подключить щупы вольтметра к самой крутилке и пину GND.
Главное преимущество дорогущих драйверов TMC – отсутствие шума/свиста/вибраций при работе, так как драйвер своими силами интерполирует сигнал до микрошага 1/256.
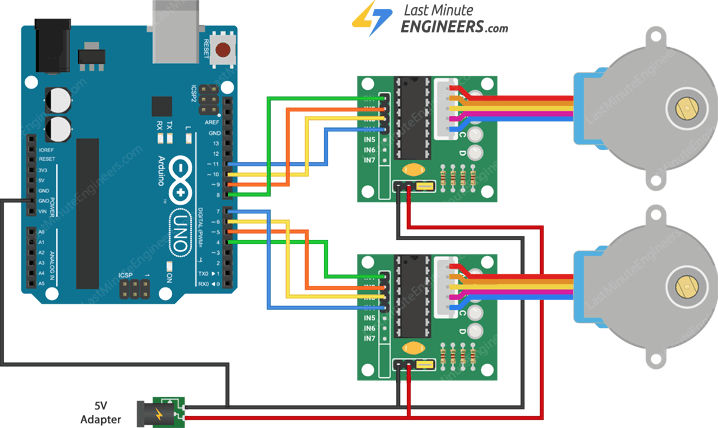
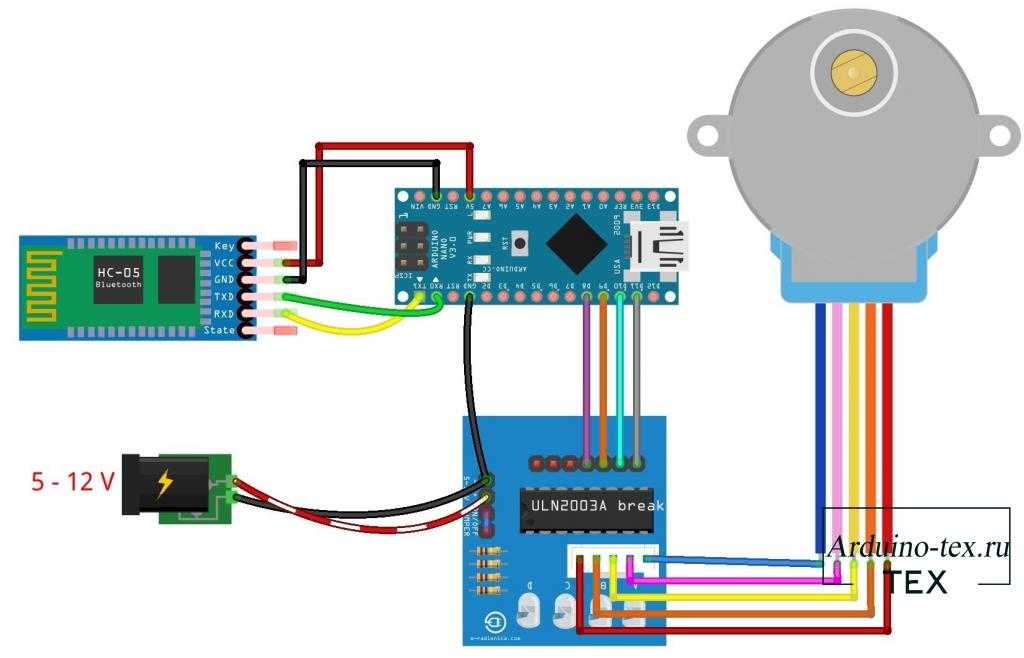
Подключение шагового двигателя 28BYJ-48-5V к Arduino. Часть 1.
В этой статье мы подключаем шаговый двигатель 28BYJ-48-5V к плате Arduino через драйвер шагового двигателя на безе микросхемы ULN2003.
Для подключения понадобится:
- Плата Arduino купить плату Arduino =>>
- Шаговый двигатель 28BYJ-48 купить шаговый двигатель RKP-28BYJ-48-5V =>>
- Драйвер для шагового двигателя купить драйвер на микросхеме ULN2003A =>>
- Коммутационные провода купить провода и шлейфы папа-мама =>>
- Источник питания для Arduino купить блок питания LJY-186 9V 1A для Arduino =>>
- Корпус для Arduino купить корпус для платы Arduino =>>
Для реализации проекта подключения необходимо установить библиотеку Stepper_28BYJ в среду разработки Ардуино IDE.
Библиотека Stepper_28BYJ это оптимальная библиотека, написанная на основе стандартной общей библиотеки Stepper являющейся частью среды Arduino IDE. Она была созданна конкретно для этого шагового двигателя 28BYJ-48-5V и учитывающая все его индивидуальные параметры.
Установить библиотеку Stepper_28BYJ в среду Arduino IDE Вам поможет статья «Установка библиотек в Arduino IDE» =>>
Сборка и подключение:
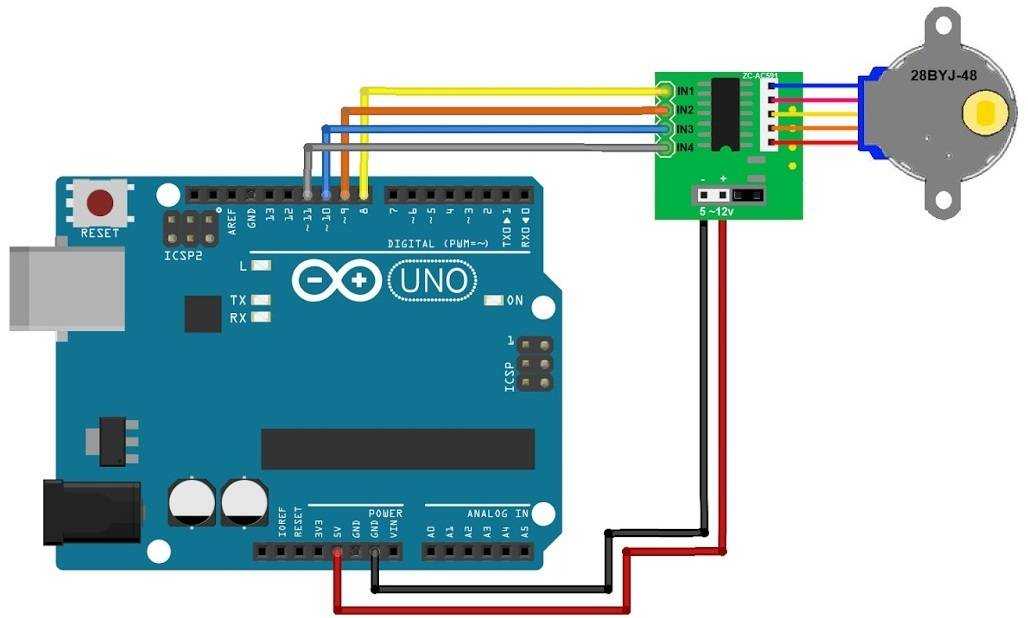
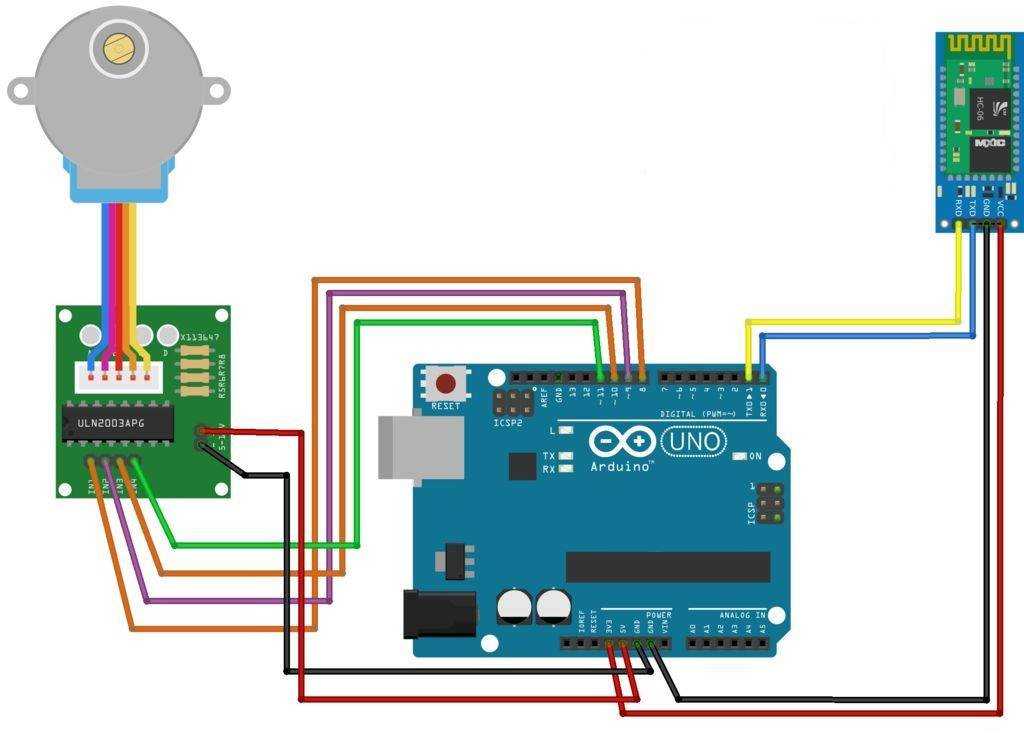
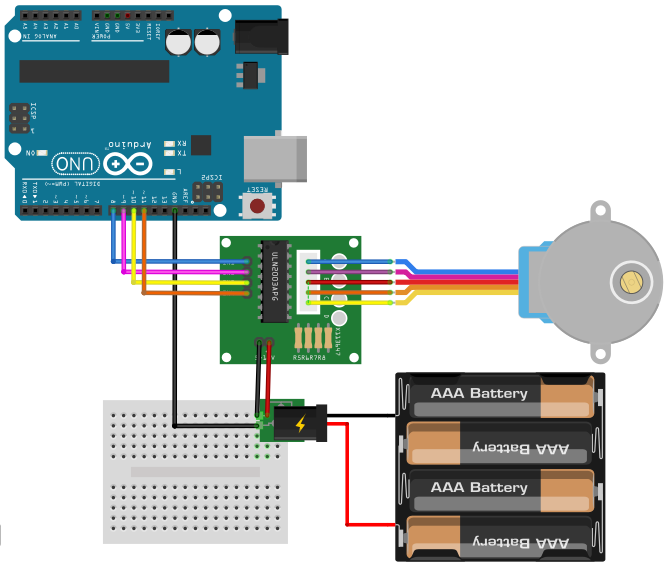
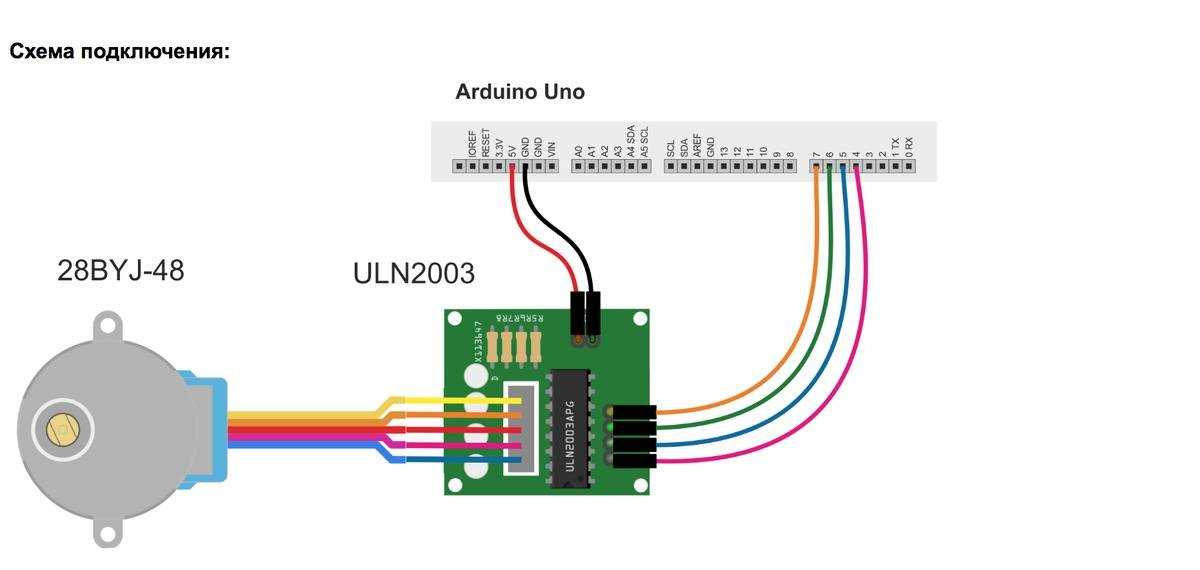
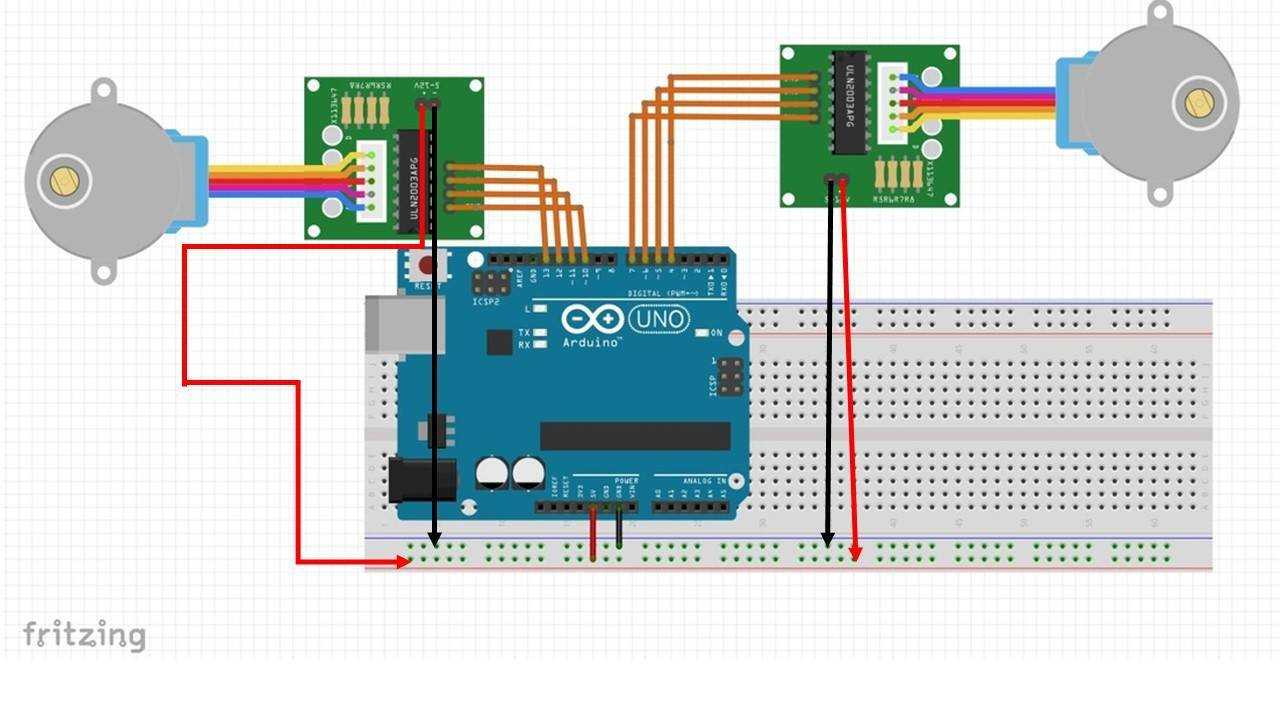
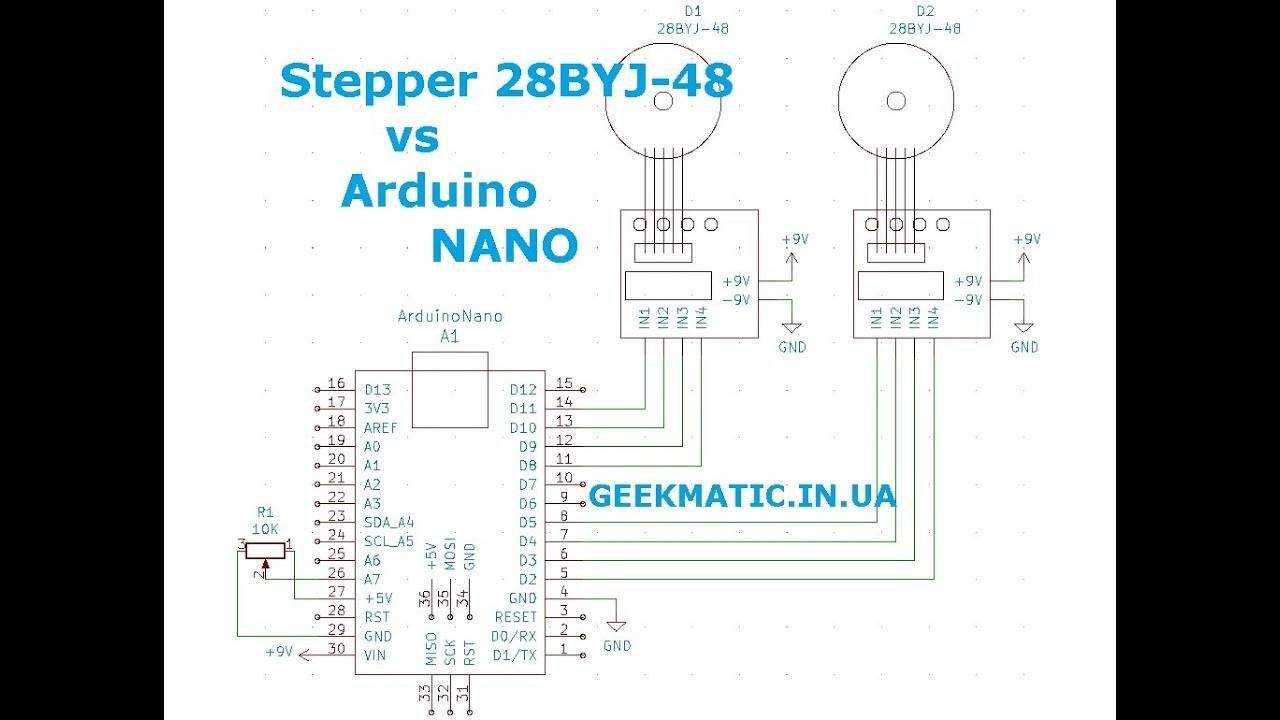
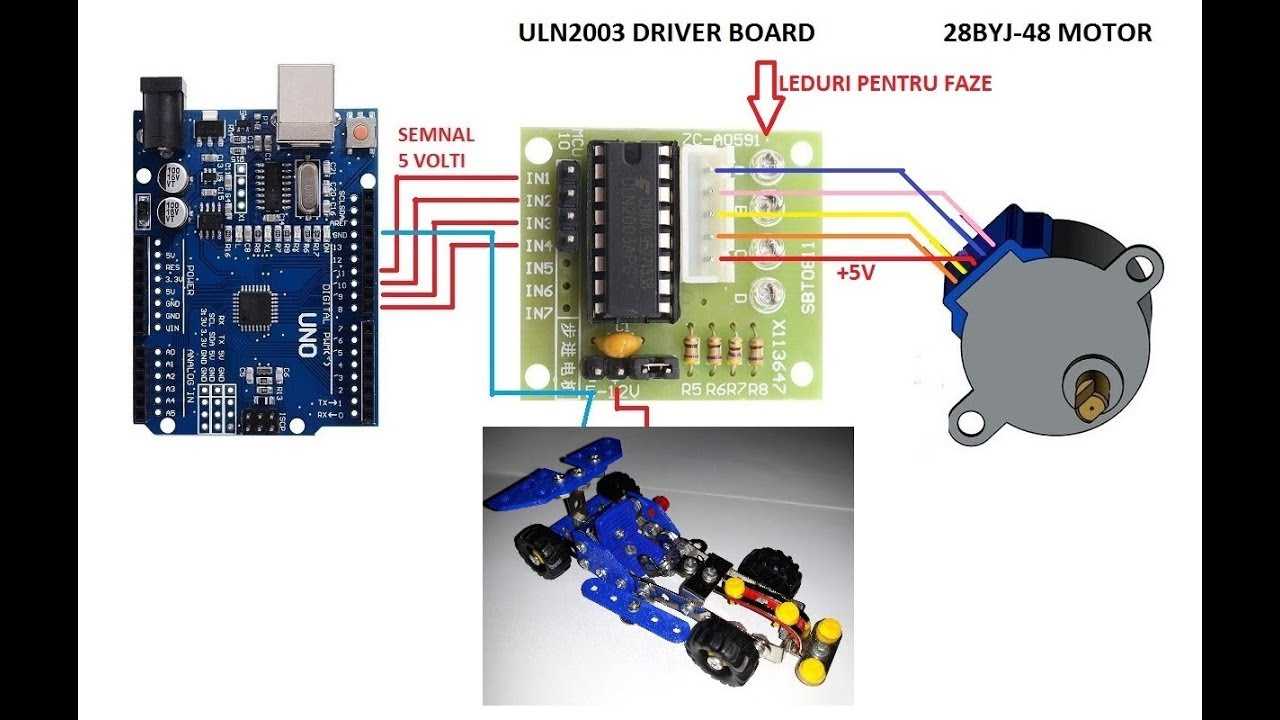
Внимание! Для драйвера на основе микросхемы ULN2003 DARLINGTON и соответственно мотора 28BYJ-48-5V, который получает питание от драйвера рекомендуется подавать питание от внешнего источника, в нашем случае (только для осуществления программирования) коммутируем подачу питания непосредственно от контроллера Ардуино (мотор работает без нагрузки и непродолжительное время) через контакты (Vin) для (+) и (GND) для (-). Драйвер управляется через четыре управляющих входа обозначенные как (IN1, IN2, IN3, IN4), именно к ним необходимо подключить соответственно выходы (Pin) с номерами 8 Pin, 9 Pin, 10 Pin и 11 Pin на плате контроллера Ардуино (как это показано на изображении ниже)
Драйвер управляется через четыре управляющих входа обозначенные как (IN1, IN2, IN3, IN4), именно к ним необходимо подключить соответственно выходы (Pin) с номерами 8 Pin, 9 Pin, 10 Pin и 11 Pin на плате контроллера Ардуино (как это показано на изображении ниже).
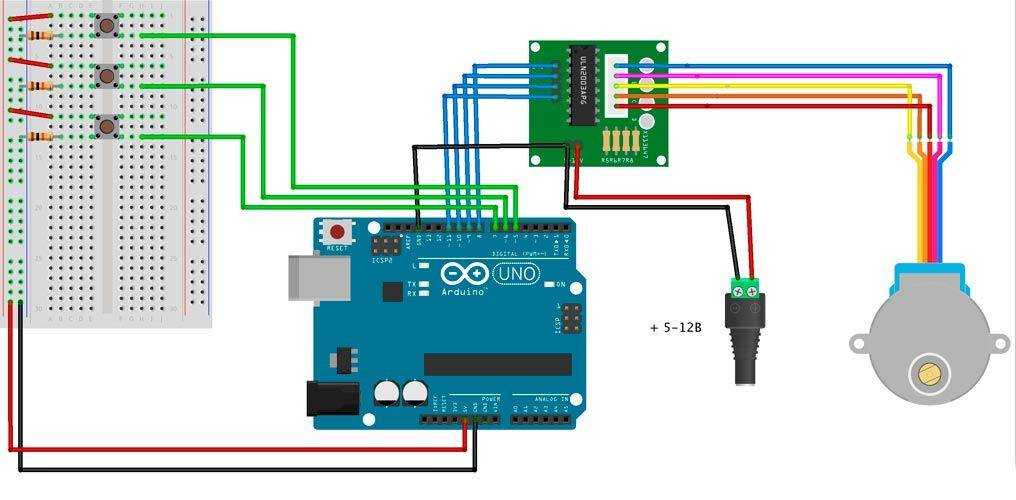
Схема подключения на примере платы контроллера Arduino UNO R3, модуля драйвера ULN2003 и шагового двигателя 28BYJ-48-5V.

Загружаем скетч:
Для загрузки скетча необходимо в среде разработки Ардуино IDE нажать вкладку новый проект и в открывшиеся окошко поместить скетч приведенный ниже:
Скетч, который необходимо загрузить в контроллер через среду разработки Ардуино IDE:
#include // установить количество шагов 4078 для мотора #define STEPS 4078 // задать управляющие пины (Pin) на плате контроллера Ардуино Stepper_28BYJ stepper(STEPS, 8, 9, 10, 11); void setup() { // установить скорость вращения двигателя 13 об/мин // как максимальное значение stepper.setSpeed(13); } void loop() { stepper.step(4000); // Задать вращение 4000 шагов по часовой стрелке stepper.step(-4000);// Задать вращение 4000 шагов против часовой стрелки // если одну из строк задания вращения исключить // мотор станет вращаться без остановки }



После загрузки скетча необходимо пересохранить новый проект под именем Stepper_28BYJ. После сохранения он будет доступен для внесения необходимых изменений и корректировок (например, для изменения направления вращения двигателя, отмена цикличности вращения или изменения скорости вращения).
Если по каким либо причинам Вы не смогли самостоятельно разобраться в подключении или программировании шагового двигателя 28BYJ-48, обратитесь к сотрудникам магазина робототехники и мехатроники — Robot-Kit.ru.
У нас Вы найдете необходимую поддержку и помощь.
В следующих частях статьи мы подробно разберем принцип работы шагового двигателя 28BYJ-48-5V, его подключение к Arduino, особенности драйвера на базе ULN2003 и различные способы программирования для управления шаговыми двигателями в среде ARDUINO IDE =>>
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.