
Сервоприводные модификации линейного движения
Применение
Сервоприводы применяются для точного (по датчику) позиционирования (чаще всего) приводимого элемента в автоматических системах:
- управляющие элементы механической системы (заслонки, задвижки, углы поворота)
- рабочие органы и заготовки в станках и инструментах
Сервоприводы вращательного
движения используются для:
- Промышленных роботов.
- Станков с ЧПУ.
- Полиграфических станков.
- Промышленных швейных машин.
- Упаковочных станков.
- Приборов.
- Авиамоделирования.
Сервоприводы линейного
движения используются, например, в автоматах установки электронных компонентов на печатную плату.
Серводвигатель

Сервомотор для авиамоделизма Серводвигатель — сервопривод с мотором, предназначенный для перемещения выходного вала в нужное положение (в соответствии с управляющим сигналом) и автоматического активного удержания этого положения.
Серводвигатели применяются для приведения в движение устройств управляемых поворотом вала — как открытие и закрытие клапанов, переключатели и так далее.
Важными характеристиками сервомотора являются динамика двигателя, равномерность движения, энергоэффективность.
Серводвигатели широко применяются в промышленности, например, в металлургии, в станках с ЧПУ, прессо-штамповочном оборудовании, автомобильной промышленности, тяговом подвижном составе железных дорог.
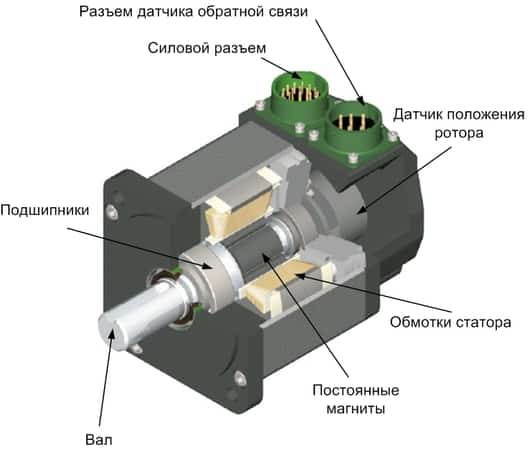
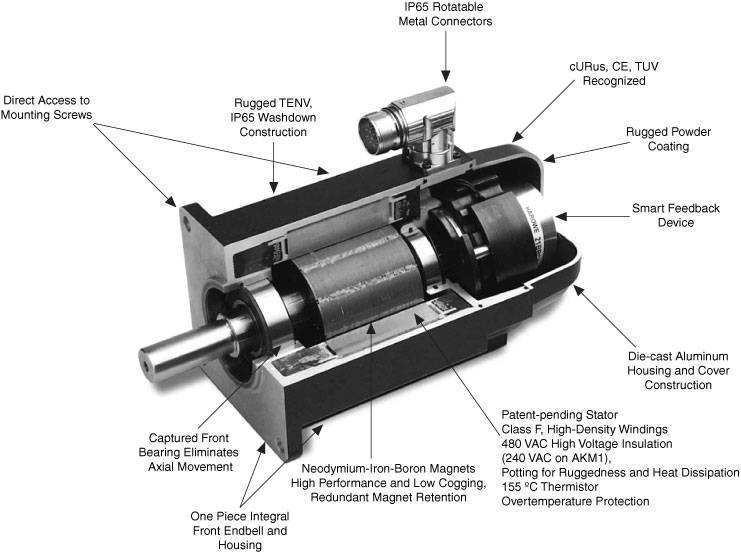
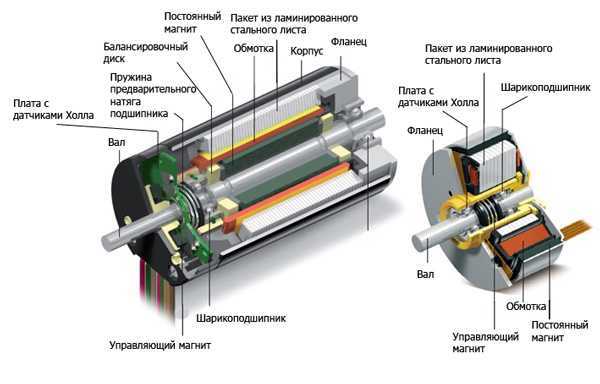
В основном в сервоприводах использовались 3-полюсные коллекторные двигатели, в которых тяжелый ротор с обмотками вращается внутри магнитов.
Первое усовершенствование, которое было применено — увеличение количества обмоток до 5. Таким образом, вырос вращающий момент и скорость разгона. Второе усовершенствование — это изменение конструкции мотора. Стальной сердечник с обмотками очень сложно раскрутить быстро. Поэтому конструкцию изменили — обмотки находятся снаружи магнитов и исключено вращение стального сердечника. Таким образом, уменьшился вес двигателя, уменьшилось время разгона и возросла стоимость.
Ну и наконец, третий шаг — применение бесколлекторных двигателей. У бесколлекторных двигателей выше КПД, так как нет щёток и скользящих контактов. Они более эффективны, обеспечивают большую мощность, скорость, ускорение, вращающий момент.
Схема электронного реле
Реализация идеи нового реле представлена на схеме.
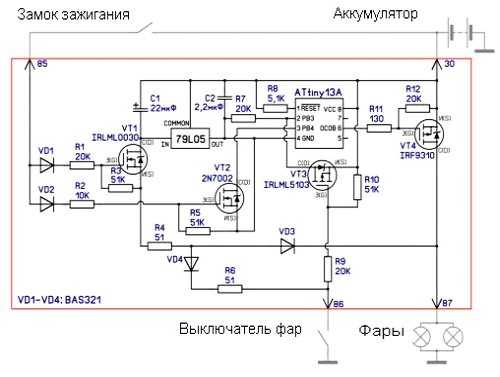
Здесь применена широтно-импульсная модуляция (ШИМ) в управлении ключевым элементом питания нагрузки. Роль электронного ключа должен выполнять элемент, обеспечивающий коммутацию постоянного напряжения 12 В с номинальным током нагрузки 12 А и кратковременным импульсным до 150 А. При этом необходимо малое падение мощности на нём в открытом состоянии и напряжение управления не более 5 В с малыми токами, работающими на слабо ёмкостную нагрузку.
Выбранный транзистор МОП с p-каналом IRF9310 отвечает этим требованиям и имеет следующие характеристики:
• напряжение сток-исток 30 В; • ток сток-исток 20 А; • пороговое напряжение затвор-исток 2,4 В; • сопротивление открытого канала 6,8 мОм; • входная ёмкость затвора 5250 пФ; • максимальная рассеиваемая мощность 2,5 Вт.
На схеме это транзистор VT4. Резистор R12 обеспечивает его надёжное и быстрое запирание. Управление ШИМ обеспечивает микроконтроллер ATtiny13A с рабочей частотой 1,2 МГц. Потребляемый микросхемой ток не превышает 1 мА. Её максимальный выходной ток 40 мА обеспечивает надёжное срабатывание ключевого элемента VT4 и ограничивается резистором R11 в пределах 33–35 мА.
Питание -5 В для ATtiny13A обеспечивается линейным стабилизатором 79L05 рассчитанном на ток нагрузки 100 мА. Конденсатор C2 сглаживает пульсации тока в моменты срабатывания транзистора VT4. Его емкость допускается 1,0–2,2 мкФ. Этот элемент единственный, который потребляет много энергии во всей схеме – до 6 мА тока покоя. Постоянное питание +12 В для всей схемы осуществляется только при включенном зажигании через VT1. Здесь применён полевой n-канальный транзистор IRLML0030. Можно использовать и другой рассчитанный на напряжение до 20 В при максимальном токе нагрузки 5 А. На массу исток транзистора подключается или через холодные лампы фар и диод VD3 или посредством включателя фар через VD4 и R6.
Сигналы управления микроконтроллера подаются на входы PB3 и PB4. Через VT2 информируется о выключении зажигания и необходимости выключения света фар. Через VT3 подаётся сигнал о включении фар. Конденсатор C1 обеспечивает, после кратковременного отключения ближнего света, накал ламп на уровне 50% в течение 0,5 сек. Используется танталовый малогабаритный электролитический конденсатор, рассчитанный на напряжение 35 В. Можно использовать и меньшей ёмкости – до 10 мкФ.
Разновидности
За счет многолетнего развития сервоприводов сегодня можно встретить самые различные виды устройства. Поэтому мы рассмотрим наиболее распространенные критерии разделения.
По типу привода:
- асинхронные сервоприводы – получаются дешевле, чем с синхронным электродвигателем, могут обеспечить точность даже при низких оборотах выходного вала;
- синхронные – более дорогой вариант, но быстрее разгоняется, что повышает скорость выполнения операций;
- линейные – не используют классических электрических моторов, но способны развивать большое ускорение.
По принципу действия выделяют:
- электромеханический сервопривод – движение обеспечивается электрической машиной и шестеренчатым редуктором;
- гидромеханический серводвигатель – движение осуществляется при помощи поршневого цилиндра, обладают значительно большей скоростью перемещения;
По материалу передаточного механизма:

- полимерные – износоустойчивые и легкие, но плохо переносят большие механические нагрузки;
- металлические – наиболее тяжелый вариант, относительно быстро изнашиваются, но могут выдерживать любые нагрузки;
- карбоновые – имеют средние характеристики по прочности и износоустойчивости, в сравнении с двумя предыдущими, но имеют более высокую стоимость.
Рис. 4. По материалу шестерней
По типу вала двигателя:

- с монолитным ротором – тяжелые сервоприводы, создают вибрацию при вращении;
- с полым ротором – самые легкие модели, быстро реагируют на команды и набирают обороты, их легче контролировать;
- с бесколлекторным ротором – не имеют подвижных контактов, которые создают дополнительное сопротивление вращению, наиболее дорогой вариант.
Рис. 5. По типу вала
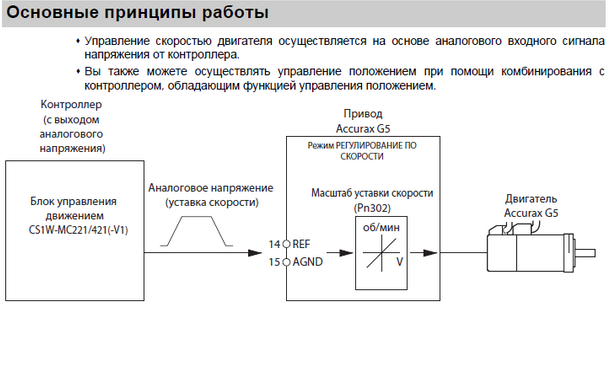
Управление
Для того чтобы серводвигатель мог функционировать в нём используют специальную систему, основанную на G-кодах. Упомянутые коды представлены набором управляющих команд, которые заложены в программе.
Например, в системе ЧПУ сервопривод контактирует с инверторами, способными изменять напряжение, которое соответствует входному, в обмотке электромотора.
Вся система серводвигателя управляется/контролируется блоком управления, из которого поступают различные команды, например, передвижения по оси Х или У. После подачи команды в инверторе создаётся определённое напряжение, питающее привод. Затем серводвигатель начинает своё круговое движение, связанное с главным исполнительным элементом механизма и энкодером.
Энкодер создаёт множество импульсов, которые подсчитываются блоком, осуществляемыми управление устройством. Для каждой позиции исполнительного элемента в программе установлено определённое количество импульсов. Так под их влиянием либо подаётся напряжение на моторчик, либо прекращается.







Виды и характеристики
Серводвигатели выпускаются в самых разных вариантах, позволяющих использовать их во многих областях. Основные конструкции разделяются на коллекторные и бесколлекторные, предназначенные для работы от постоянного и переменного тока.
Кроме того, каждый сервомотор может быть синхронным и асинхронным. Синхронные устройства обладают способностью задавать высокоточную скорость вращения, а также углы поворотов и ускорение. Эти приводы очень быстро набирают номинальную скорость вращения. Сервоприводы в асинхронном исполнении управляются за счет изменения параметров питающего тока, когда его частота меняется с помощью инвертора. Они с высокой точностью выдерживают заданную скорость даже при самых низких оборотах.

В зависимости от принципиальной схемы и конструкции, сервоприводы могут быть электромеханическими и электрогидромеханическими. Первый вариант, включающий редуктор и двигатель, отличается низким быстродействием. Во втором случае действие происходит очень быстро за счет движения поршня в цилиндре.
Каждый сервопривод характеризуется определенными параметрами:
- Крутящий момент или усилие, создаваемое на валу. Считается наиболее важным показателем работы сервопривода. Для каждой величины напряжения существует собственный крутящий момент, отражаемый в паспорте изделия.
- Скорость поворота. Данный параметр представляет собой определенный период времени, который требуется, чтобы изменить позицию выходного вала на 600. Эта характеристика также зависит от конкретного значения напряжения.
- Максимальный угол поворота, на который может развернуться выходной вал. Чаще всего эта величина составляет 180 или 3600.
- Все сервоприводы разделяются на цифровые и аналоговые. В зависимости от этого и осуществляется управление сервоприводом.
- Питание серводвигателей. В большинстве моделей используется напряжение от 4,8 до 7,2В. Питание и управление осуществляется с помощью трех проводников.
- Возможность модернизации в сервопривод постоянного вращения.
- Материалы для редуктора могут использоваться самые разные. Шестерни изготавливаются из металла, карбона, пластика или комбинированных составов. Каждый из них обладает своими преимуществами и недостатками. Например, пластиковые детали плохо выдерживают ударные нагрузки, но устойчивы к износу в процессе длительной эксплуатации. Металлические шестерни, наоборот, быстро изнашиваются, зато они обладают высокой устойчивостью к динамическим нагрузкам.
Принцип работы
Принцип работы заключается в следующем. Контроллер программируется на определенный режим работы и посылает сигнал на частотный преобразователь. Устройство подает на электродвигатель напряжение необходимой частоты и величины. Приводное устройство перемещает исполнительный механизм с заданной скоростью и моментом, соответствующим нагрузке. При достижении заданного положения исполнительного механизма соответствующий сигнал от датчиков положения поступает в контроллер, который останавливает двигатель.
Принцип работы сервопривода идентичен принципу работы автоматического регулятора с отрицательной обратной связью. Устанавливается опорный сигнал, называемый нулем, с которым сравнивается сигнал от датчика положения. Если они равны, привод останавливается, если отклонения отрицательные или положительные, на двигатель подается напряжение, пока рабочий инструмент или привод не достигнет требуемого положения.
В целом, сервопривод состоит из следующих функциональных узлов:
Схема обычной мигалки на NE555
Гаджет для приготовления чая
Когда я только начал знакомиться с linux’ом, мне попалась небольшая, но очень важная программа для приготовления чая. В ней можно выбрать сорт чая, и по прошествии времени, необходимого для заварки, она начинала помаргивать иконкой в трее и пищать. Из какого дистрибутива была программа, я уже не помню, но она пару раз помогла мне выпить не остывший чай. С программами всегда так: снес операционку — и нет ее, а железка на столе куда надежнее!
Для реализации этой штуковины понадобится целых два таймера 555. Один (тот, что на схеме слева) будет отсчитывать 4 минуты, за которые заварка превращается в благоуханный напиток, а другой — генерировать импульсы для пищалки.
Генератор на IC2 трудолюбиво и непрерывно генерирует импульсы. Рассмотрим подробнее первый таймер. Он подсоединен в моностабильном режиме. В нормальном состоянии сразу после включения питания на выходе 3 низкий уровень — он притянут к земле, а значит — пищит динамик и горит светодиод LED2 (на самом деле светодиод моргает, но очень быстро, и это незаметно). Как только нажимается кнопка S1, таймер включается, на выходе 3 становится высокий уровень, зажигается светодиод LED1, а динамик выключается, ведь LED2 хоть и «свето-», но все-таки диод, и в обратную сторону ток пропускать не будет. Так продолжается, пока конденсатор C4 заряжается через резистор R1. Когда напряжение на ножке 6 станет больше 2/3 Vcc, то таймер выключится и вновь запищит бипер.
Схему можно чутка модифицировать, добавив последовательно R1 — переменный резистор на 500 кОм, тогда можно будет регулировать время заварки для разных сортов чая.
Область применения НЕ555
Возможности микросхемы дают широкий спектр техники, в которой она используется. Мультивибраторы на 555 серии встречаются практически во всех схемах генерации сигналов.
Примером служат различные звуковые и световые оповещающие устройства, детекторы металла, освещенности, влажности или касания. Таймер, заложенный в микросхему, позволяет создавать реле времени, для контроля работы различного оборудования по определенным человеком периодам.
Варианты исполнения в виде триггера Шмитта применяются как фильтрующие преобразователи зашумленных сигналов, для придания им правильной прямоугольной формы. Актуальность подобные схемы имеют и в цифровой технике, в которой используются только два вида импульсов – его наличие и отсутствие.
Вместо заключения
Сервоприводы бывают разные, одни получше — другие подешевле, одни надёжнее — другие точнее. И перед тем, как купить сервопривод, стоит иметь в виду, что он может не обладать лучшими характеристиками, главное, чтобы подходил для вашего проекта. Удачи в ваших начинаниях!
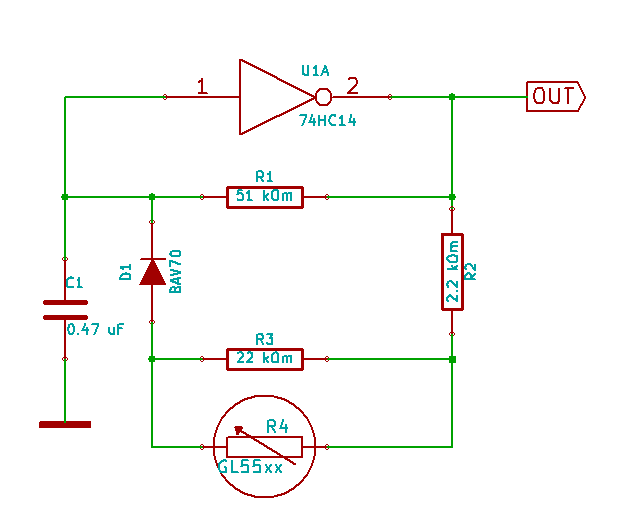
Попался под руку популярный недорогой сервопривод SG90. И задумалось управлять им, но без микроконтроллера. В этой статье я изложу ход мыслей разработчика при реализации одного из вариантов решения.
Кому интересно, прошу под кат.
Схема такого генератора выглядит так:
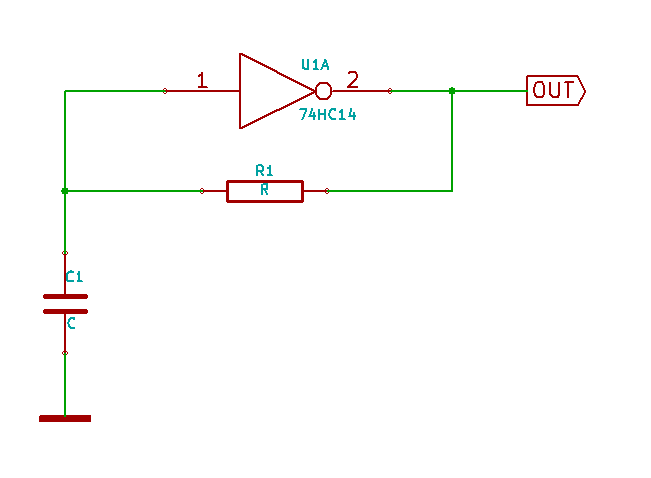
Немного теории
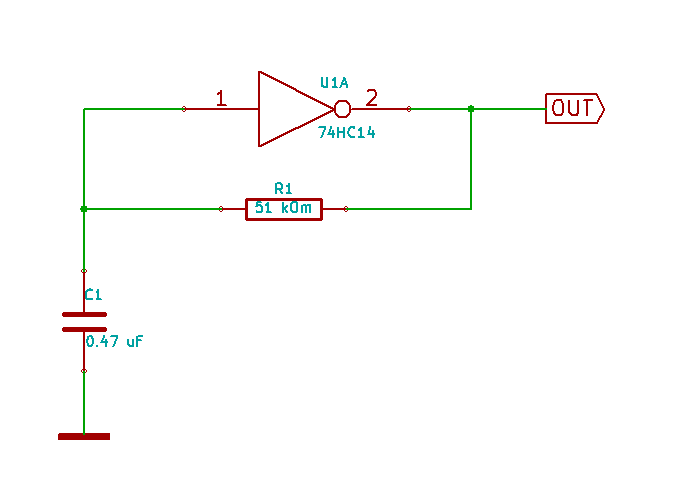
Тогда схема примет следующий вид:
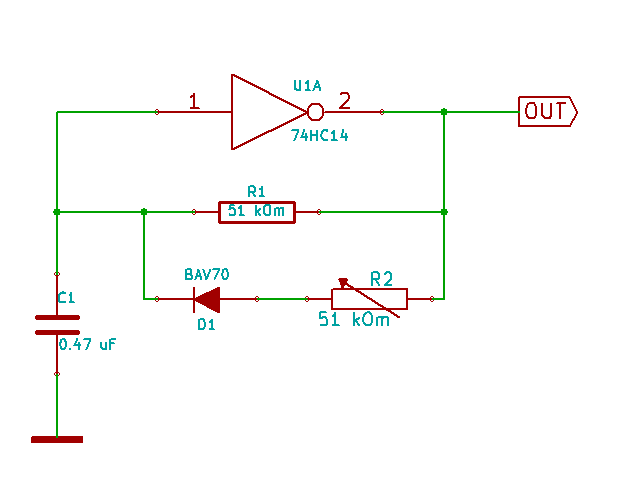
Далее начинается самое интересное. Расчетных формул для получения значений сопротивлений обеспечивающих требуемые длительности импульсов нет, поэтому на уровне интуиции (опытным путем, с помощью переменного резистора) определяем значения сопротивления, при которых устанавливаются требуемые значения длительностей импульсов. Затем изменяем схему так, чтобы при изменении сопротивления фоторезистора общее сопротивление изменялось, устанавливая требуемые значения длительностей импульсов.
Итоговая схема принимает следующий вид:
Подключение к Arduino
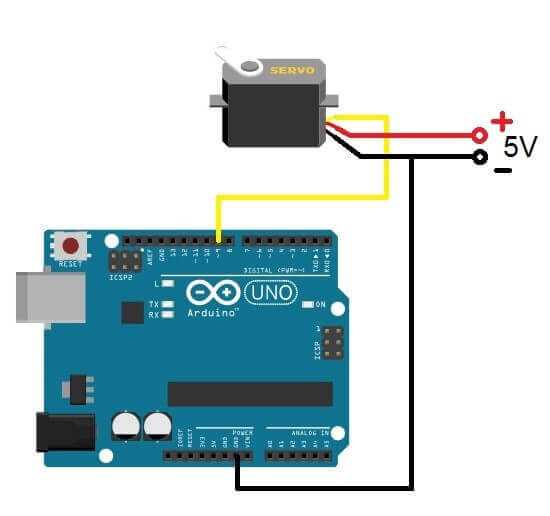
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
красный — питание; подключается к контакту 5V или напрямую к источнику питания
коричневый или чёрный — земля
жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield . Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo .
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.

![Сервоприводы: устройство, принцип работы и основные виды [амперка / вики]](https://magazinzing.ru/wp-content/uploads/c/b/b/cbb9ec9a8cde7c3fa93b0caa340baaf5.jpeg)



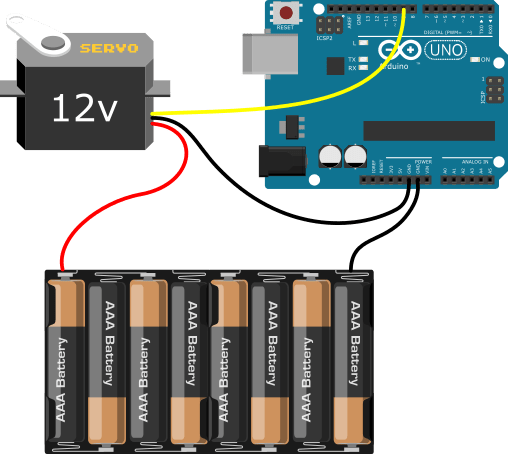
Рассмотрим на примере подключения 12V сервопривода:
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Область применения
Сервопривод нашел широкое применение в робототехнике и манипуляторах. При создании небольших механизмов используют сервопривод mg995 и ему подобные.

Для управления современными приводами в радиолюбительских изделиях часто используется представители семейства ардуино. Оно представляет набор электронных устройств, предназначенных для управления роботами и приборами автоматики, где применяется сервопривод. Управляющий сигнал может быть аналоговым или цифровым.
Схема подключения привода к устройству управления представлена на рисунке. Устройство может управлять несколькими приводами.
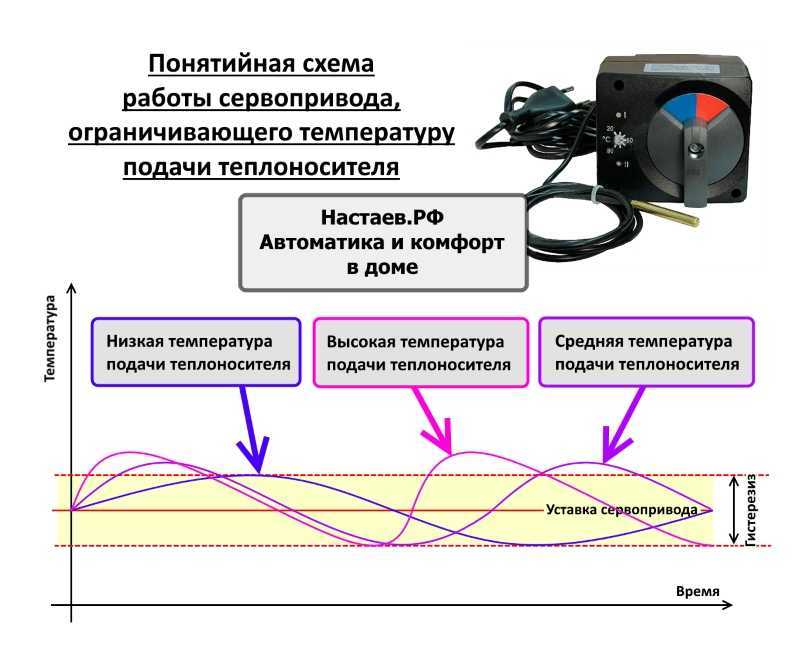
Для теплых полов используют автоматику, которая поддерживает заданную температуру. А подачу теплоносителя, который представляет собой горячую воду от отопительного котла, регулирует сервопривод.
Его подключают к устройству управления, которое контролирует температуру с помощью датчика температуры, и выдает команду на электротермический сервопривод типа RBM 24V. Также может применяться сервопривод АС230V с регулятором.

Регулирование температуры в отоплении осуществляется автоматикой, для чего используется сервопривод типа ICMA NC230V или NC24V. Приборы выпускаются на различное напряжение питания.

Унифицированный сервопривод, используемый в автомобиле, имеет малые габариты. Предназначен для работы с бортовым напряжением на 12 Вольт. Он интегрирован с центральным замком, устанавливается на все двери машины, в том числе и на пятую дверь (дверь багажника).
Также механизм управляет подачей горячей жидкости на печку. Работает в паре с термоэлектрическим датчиком, сигнал от которого поступает на устройство управления. После анализа датчик подает команду на сервопривод, который увеличивает или уменьшает подачу жидкости.
Например, для автомобилей ВАЗ применяют электропривод с редуктором SL-5.

Это далеко не полный перечень применения таких устройств.
Описание
3 наиболее популярные схемы на основе NE555
Одновибратор
Практический вариант схемы одновибратора на TTL NE555 приведен на рисунке. Схема питается однополярным напряжением от 5 до 15В. Времязадающими элементами здесь являются: резистор R 1 – 200кОм-0,125Вт и электролитический конденсатор С 1 – 4,7мкФ-16В. R 2 поддерживает на входе высокий потенциал, пока некоторое внешнее устройство не сбросит его до низкого уровня (например, транзисторный ключ). Конденсатор С 2 защищает схему от сквозных токов в моменты переключения.
Активизация одновибратора происходит в момент кратковременного замыкания на землю входного контакта. При этом на выходе формируется высокий уровень длительностью:
t=1,1*R 1 *C 1 =1,1*200000*0,0000047=1,03 c.
Таким образом, данная схема формирует задержку выходного сигнала относительно входного на 1 секунду.
Мигание светодиодом на мультивибраторе
Отталкиваясь от рассмотренной выше схемы мультивибратора можно собрать простую светодиодную мигалку. Для этого к выходу таймера последовательно с резистором подключают светодиод. Номинал резистора находят по формуле:
R=(U ВЫХ -U LED)/I LED ,
U ВЫХ – амплитудное значение напряжения на выводе 3 таймера.
Количество подключаемых светодиодов зависит от типа применяемой микросхемы NE555, её нагрузочной способности (КМОП или ТТЛ). Если необходимо мигать светодиодом мощностью более 0,5 Вт, то схему дополняют транзистором, нагрузкой которого станет светодиод.
Реле времени
Схема регулируемого таймера (электронное реле времени) показана на рисунке. С её помощью можно вручную задавать длительность выходного сигнала от 1 до 25 секунд. Для этого последовательно с постоянным резистором в 10 кОм устанавливают переменный номиналом в 250 кОм. Ёмкость времязадающего конденсатора увеличивают до 100 мкФ.
Схема работает следующим образом. В исходном состоянии на выводе 2 присутствует высокий уровень (от источника питания), а на выводе 3 низкий уровень. Транзисторы VT1, VT2 закрыты. В момент подачи на базу VT1 положительного импульса по цепи (Vcc-R2-коллектор-эмиттер-общий провод) протекает ток. VT1 открывается и переводит NE555 в режим отсчета времени. Одновременно на выходе ИМС появляется положительный импульс, который открывает VT2. В результате ток эмиттера VT2 приводит к срабатыванию реле. Пользователь может в любой момент прервать выполнение задачи, кратковременно закоротив RESET на землю.
Рассмотреть все популярные схемы на основе NE555 в одной статье невозможно. Для этого существуют целые сборники, в которых собраны практические наработки за всё время существования таймера. Надеемся, что приведенная информация послужит ориентиром во время сборки схем, в том числе нагрузкой которых служат светодиоды.
Читайте так же
Сразу стоит отметить при описании микросхемы NE 555, что она выпускается как в стандартной ТТЛ логике, так и КМОП, поэтому она может работать в широком диапазоне напряжений и использована во многих типах устройств в качестве генератора тактовых импульсов или универсального таймера. Микросхема может генерировать как одиночные, так повторяющиеся импульсы, что зависит от принципиальной схемы включения и выбора конкретного режима работы.
Разрабатывался первый вариант ИС еще в 1971 году знаменитой на то время компанией Signetics. По своим характеристикам и функциональным возможностям она является широко востребованной, свидетельством чего является ее активное применение в устройствах управления скоростью вращения двигателей и тиристорных регуляторах мощности.
Также, ее можно использовать для конструирования унифицированного генератора импульсов с регулируемой выходной частотой последовательностью импульсов. Для подробного описания характеристик микросхемы
смотрите на ne 555 datasheet. В нем указаны не только основные характеристики, но также представлены диаграммы работы. А в этом описании ne 555 предоставим общую информацию, достаточную для разработки электронных устройств своими руками.
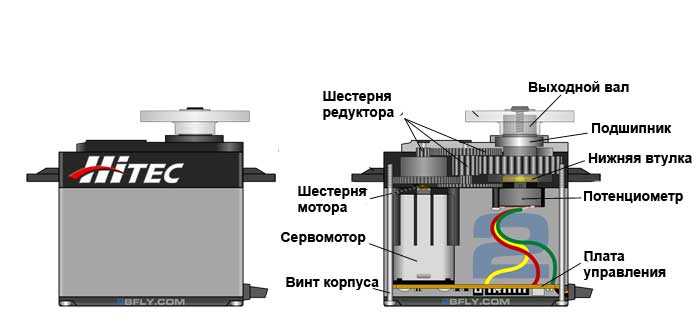
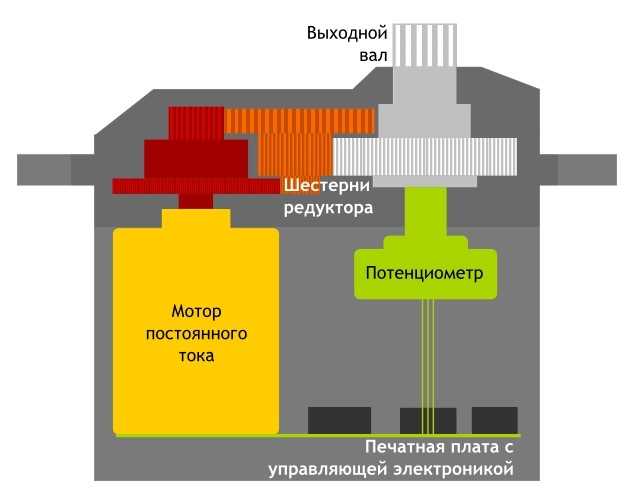
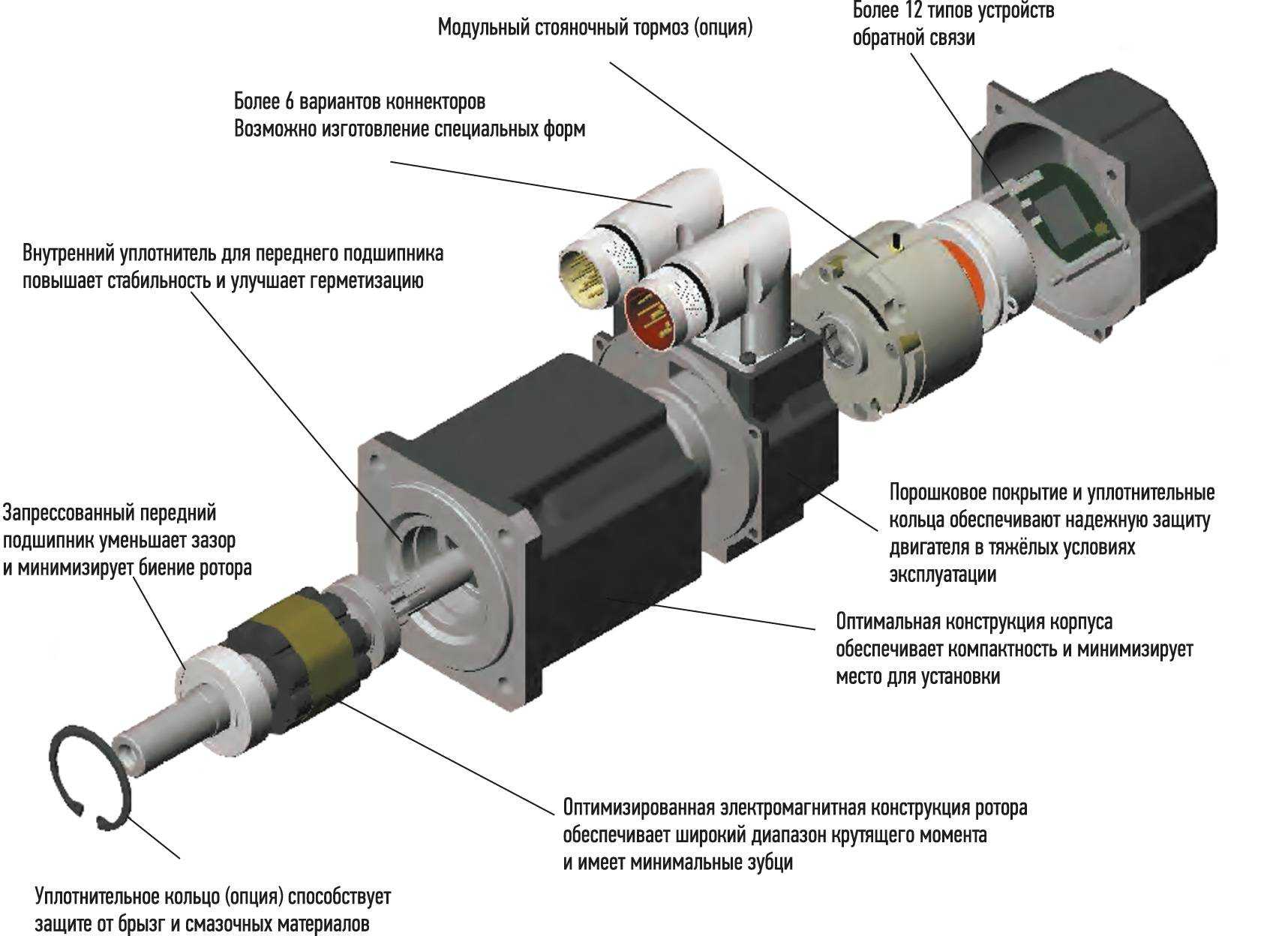
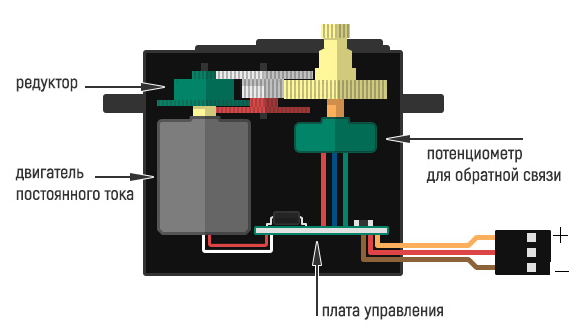
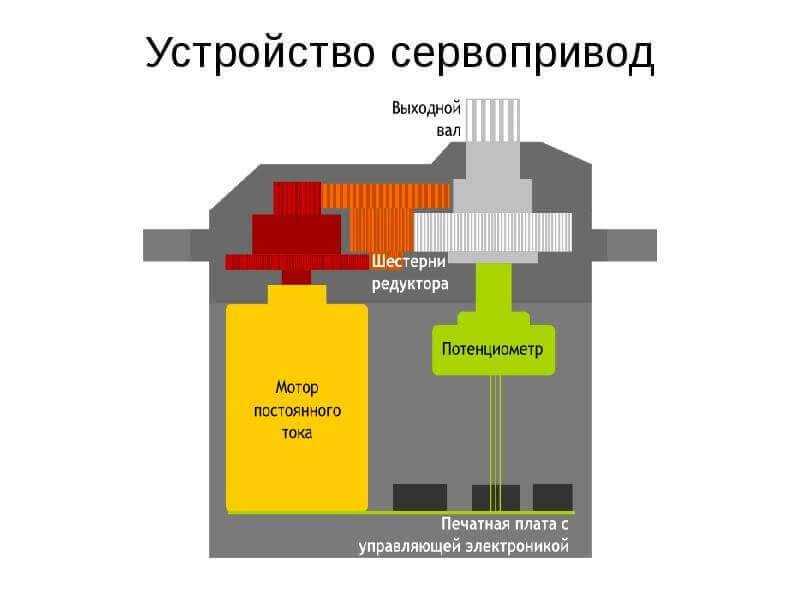
Устройство сервопривода
Сервоприводы имеют несколько составных частей.
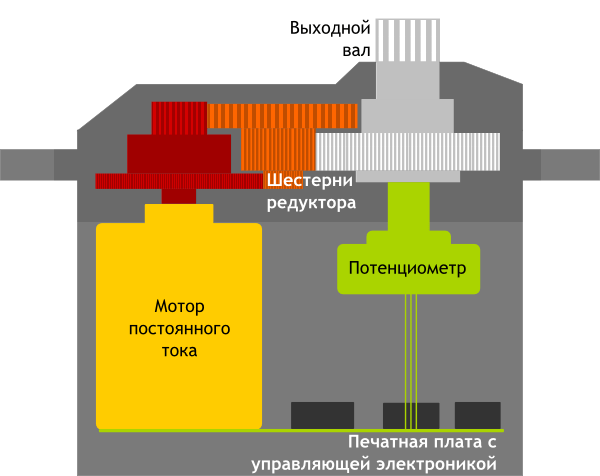
Привод — электромотор с редуктором. Чтобы преобразовать электричество в механический поворот, необходим электромотор
. Однако зачастую скорость вращения мотора бывает слишком большой для практического использования. Для понижения скорости используется редуктор
: механизм из шестерней, передающий и преобразующий крутящий момент.






Включая и выключая электромотор, можно вращать выходной вал — конечную шестерню сервопривода, к которой можно прикрепить нечто, чем мы хотим управлять. Однако, для того чтобы положение контролировалось устройством, необходим датчик обратной связи
— энкодер
, который будет преобразовывать угол поворота обратно в электрический сигнал. Для этого часто используется потенциометр. При повороте бегунка потенциометра происходит изменение его сопротивления, пропорциональное углу поворота. Таким образом, с его помощью можно установить текущее положение механизма.
Кроме электромотора, редуктора и потенциометра в сервоприводе имеется электронная начинка, которая отвечает за приём внешнего параметра, считывание значений с потенциометра, их сравнение и включение/выключение мотора. Она-то и отвечает за поддержание отрицательной обратной связи.
К сервоприводу тянется три провода. Два из них отвечают за питание мотора, третий доставляет управляющий сигнал, который используется для выставления положения устройства.
Теперь давайте посмотрим, как управлять сервоприводом извне.
Электрический сервопривод для отопления
Описание [ править | править код ]
Радиолюбитель
Особенности процесса изготовления
Рекомендуется заключать все элементы схемы в металлический корпус, чтобы охлаждение происходило намного лучше. Для надежности нужно заливать короб при помощи клеевого пистолета. Главное при работе – это правильно подобрать металлическую подложку, чтобы обеспечить наилучшее отведение тепла. Для изготовления используется опалубка, в которую заключается твердотельное реле постоянного тока. Своими руками ее изготовить можно из любого материала.
Идеально подойдет пластиковая коробка или отрезок трубы. Все зависит от того, какой размер у изделия. Металлическая подложка должна размещаться в этой опалубке. Тщательно нужно залить клеем все элементы схемы, отверстия в корпусе, чтобы обеспечить качественную изоляцию
Обратите внимание на то, что у симисторов выводы обычно неоднозначно определяются, поэтому их нужно заранее проверить. Для проверки открытия симистора необходимо использовать мегомметр
Как только симистор откроется, сопротивление изменится от нескольких десятков мегаом до 1-2 кОм.
Дополнительные возможности
Как работает сервопривод
Принцип его действия завязан на использовании импульсного сигнала, обладающего тремя ключевыми свойствами, – частотой, наименьшей и наивысшей продолжительностью, и как раз последняя, то есть длина, и задает угол поворота. Может находиться в диапазоне 0,8-2,2 мс. Как только поступает на печатную плату, активирует энкодер (потенциометр) и, через механическую передачу, выходной вал.
Электронная схема сравнивает реальное положение вала с запрограммированным. При этом возможно 3 состояния. И первое из них – нулевой момент, то есть полного совпадения, что значит – силовой агрегат не работает (остановлен). При втором управляющий сигнал выше опорного, это провоцирует поворот в одну сторону, при третьем – ниже, что оборачивается движением вращающейся части в другом направлении.
Таким образом, принцип работы сервомотора сводится к следующему:
- привод получает импульс на вход, допустим, команду изменения угла;
- блок управления соотносит полученный сигнал с фактическими значениями, снятыми датчиком;
- исходя из результатов анализа, данная плата выдает команду – перемещения по какому-то вектору, ускорения или замедления, – причем обязательно направленную на то, чтобы привести реальную цифру к заданной и необходимой.
Сравнение осуществляется на основании разностных величин и учитывает параметр длительности, а поэтому определяет разбежку показателей с максимальной точностью. Эта особенность дает возможность обеспечить необходимое позиционирование инструмента.
Постоянная кнопка
Порой необходимо, чтобы твоя схемка работала, как телевизор: нажал кнопочку, она включилась, нажал еще раз — выключилась. И эту задачу тоже можно решить на 555. Внутри микросхемы запрятан триггер, который для этой цели можно использовать.
Основная часть схемы уже не должна вызывать у тебя особых вопросов, остановлюсь лишь на выходе третьей ножки, а именно — резисторе R4 и транзисторе T1. Ведь мы делаем кнопку, а значит — она должна уметь пропускать ток, и не факт, что 200 мА, на которые способен 555, будет достаточно. Здесь в качестве ключа используется небольшой NPN-транзистор 2N3904, который способен пропускать те же 200 мА, что и сам таймер, и смысла в нем немного, но его всегда можно заменить на более мощный МОП-транзистор — например, IRF630, который позволит подключить нагрузку до 9А. Правда, для такого транса напряжение придется увеличить на схеме до 12 вольт, иначе затвор не откроется.
Еще не очень круто применять такой выключатель в мобильных устройствах, так как даже в выключенном состоянии он потребляет ток в 3-6 мА, что заметно подсаживает батарею.
Подключение серводвигателя к ардуино
Сервопривод обладает тремя контактами, которые окрашены в разные цвета. Коричневый провод ведет к земле, красный – к питанию +5В, провод оранжевого или желтого цвета – сигнальный. К Ардуино устройство подключается через макетную указанным на рисунке образом. Оранжевый провод (сигнальный) подключается к цифровому пину, черный и красный — к земле и питанию соответственно. Для управления серводигателем не требуется подключение именно к шим-пинам — принцип управления серво мы уже описывали ранее.
Не рекомендуется подключать мощные серво напрямую к плате , т.к. они создают для схемы питания Arduino ток, не совместимый с жизнью — повезет, если сработает защита. Чаще всего симптомы перегрузки и неправильного питания сервопривода заключаются в «дергании» серво, неприятному звуку и перезагрузке платы. Для питания лучше использовать внешние источники, обязательно объединяя земли двух контуров.