

Содержание:
Шаговый двигатель против двигателя постоянного тока
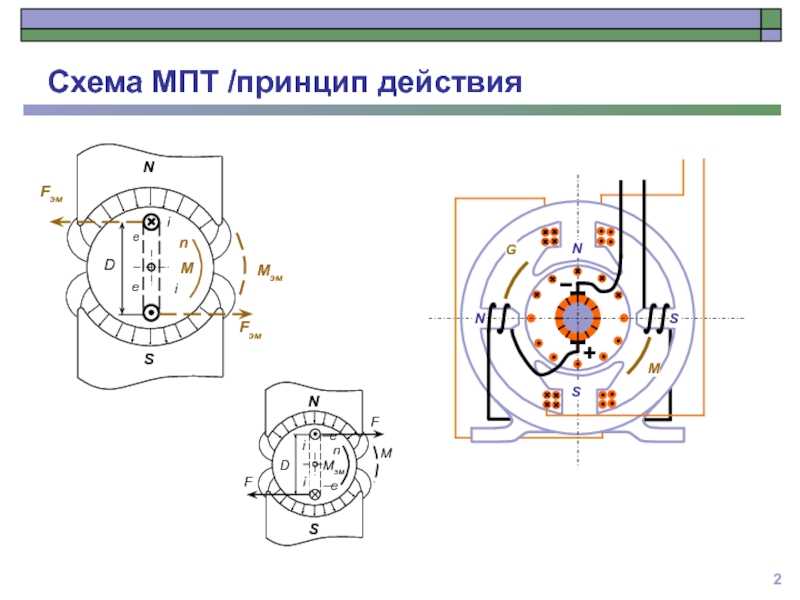
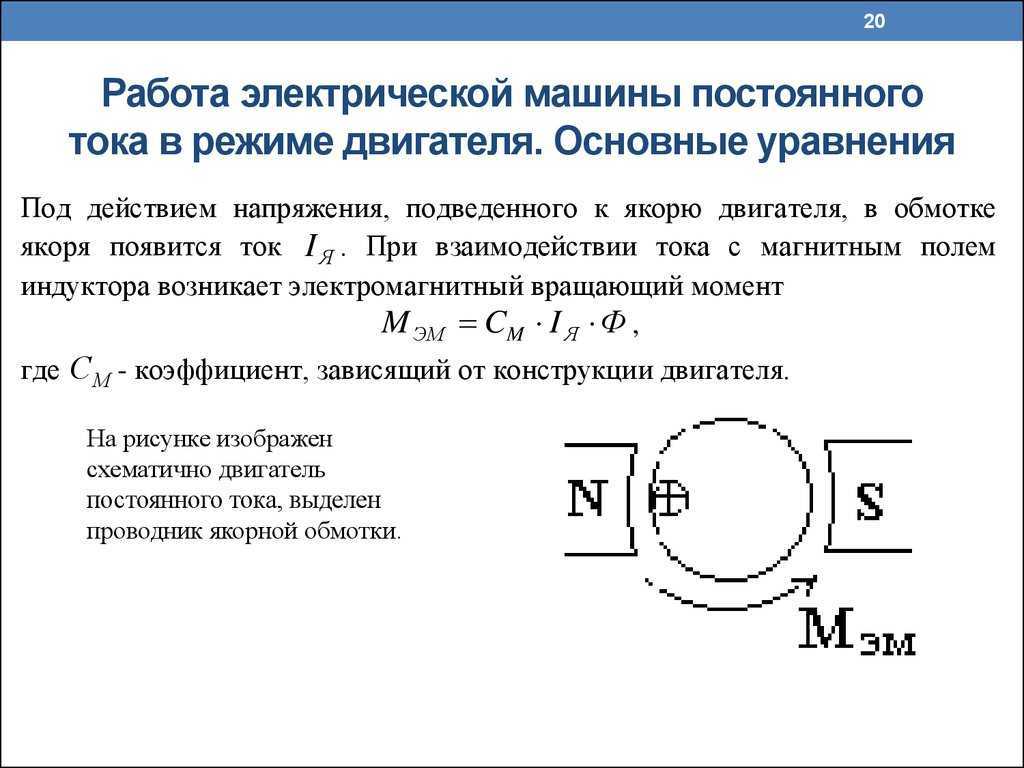
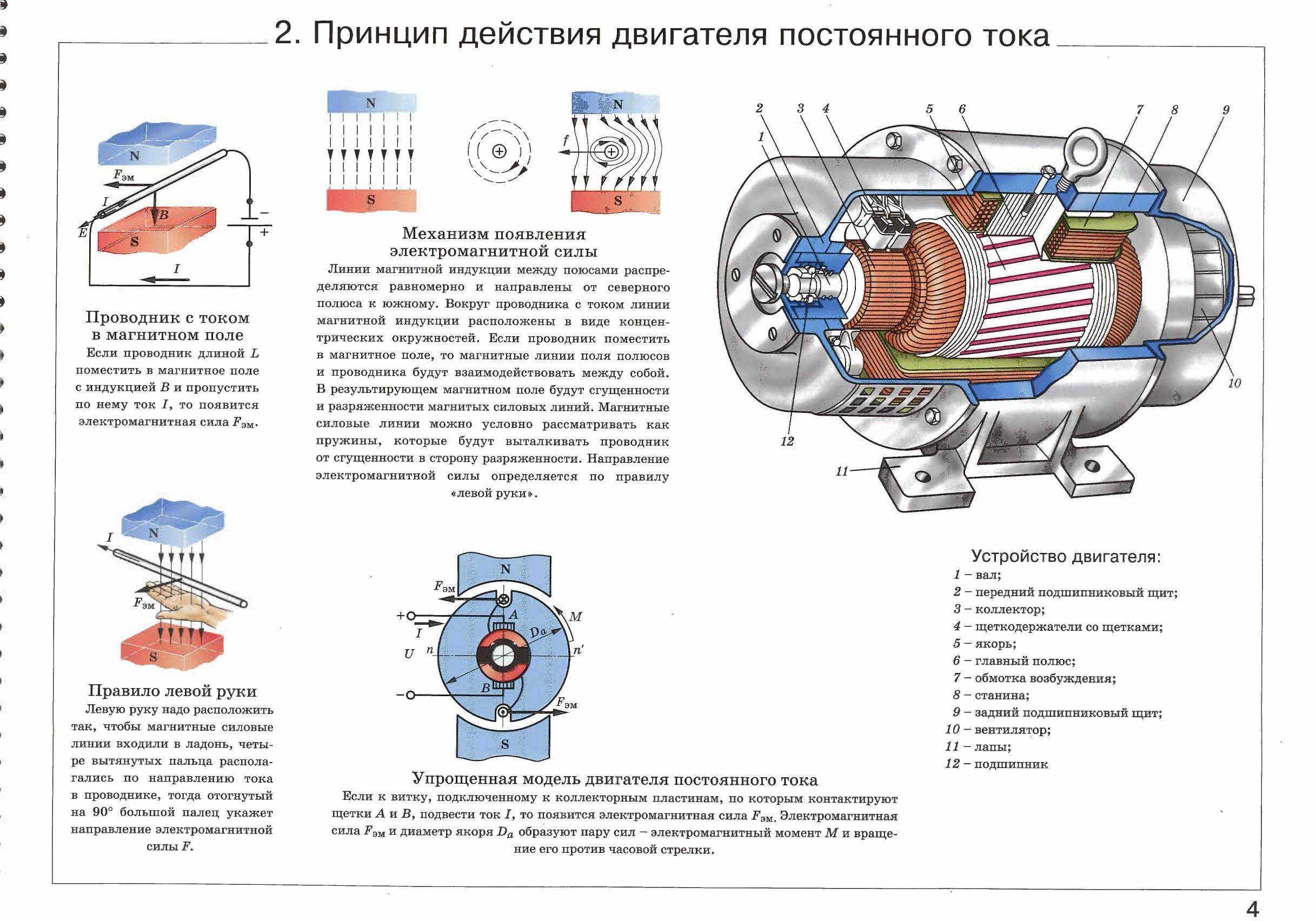
Принцип, используемый в двигателях, является одним из аспектов принципа индукции. Закон гласит, что если заряд движется в магнитном поле, на него действует сила в направлении, перпендикулярном как скорости заряда, так и магнитному полю. Тот же принцип применяется к потоку заряда, тогда это ток и проводник, по которому течет ток. Направление этой силы задается правилом правой руки Флеминга. Простой результат этого явления состоит в том, что если ток течет по проводнику в магнитном поле, проводник перемещается. Все моторы работают по этому принципу.
Подробнее о двигателе постоянного тока
Двигатель постоянного тока питается от источников питания постоянного тока, и используются два типа двигателей постоянного тока. Это щеточный электродвигатель постоянного тока и бесщеточный электродвигатель постоянного тока.
В щеточных двигателях щетки используются для поддержания электрического соединения с обмоткой ротора, а внутренняя коммутация изменяет полярность электромагнита, чтобы поддерживать вращательное движение. В двигателях постоянного тока в качестве статоров используются постоянные или электромагниты. Все катушки ротора соединены последовательно, и каждый переход соединен с стержнем коммутатора, и каждая катушка под полюсами способствует созданию крутящего момента.
В небольших двигателях постоянного тока количество обмоток невелико, а в качестве статора используются два постоянных магнита. Когда требуется более высокий крутящий момент, количество обмоток и сила магнита увеличиваются.
Второй тип — это бесщеточные двигатели, которые имеют постоянные магниты, поскольку ротор и электромагниты расположены в роторе. Бесщеточный двигатель постоянного тока (BLDC) имеет много преимуществ по сравнению с щеточным двигателем постоянного тока, такие как лучшая надежность, более длительный срок службы (отсутствие эрозии щеток и коллектора), больший крутящий момент на ватт (повышенная эффективность) и больший крутящий момент на вес, общее снижение электромагнитных помех (EMI) , а также снижение шума и устранение ионизирующих искр от коллектора. Транзистор высокой мощности заряжается и приводит в движение электромагниты. Эти типы двигателей обычно используются в охлаждающих вентиляторах компьютеров.
Подробнее о шаговом двигателе
Шаговый двигатель (или шаговый двигатель) — это бесщеточный электродвигатель постоянного тока, в котором полное вращение ротора разделено на ряд равных шагов. Затем положение двигателя можно контролировать, удерживая ротор на одном из этих этапов. Без какого-либо датчика обратной связи (контроллер с разомкнутым контуром) он не имеет обратной связи как серводвигатель.
Шаговые двигатели имеют несколько выступающих электромагнитов, расположенных вокруг куска железа в форме центральной шестерни. Электромагниты получают питание от внешней цепи управления, например микроконтроллера. Чтобы заставить вал двигателя вращаться, сначала на один из электромагнитов подается мощность, которая заставляет зубья шестерни магнитно притягиваться к зубцам электромагнита и вращается в это положение. Когда зубья шестерни совмещены с первым электромагнитом, зубья смещены относительно следующего электромагнита на небольшой угол.
Для перемещения ротора включается следующий электромагнит, выключая остальные. Этот процесс повторяется для непрерывного вращения. Каждый из этих небольших поворотов называется «шагом». Целое число из нескольких шагов завершает цикл. Используя эти шаги для поворота двигателя, можно управлять двигателем для получения точного угла. Есть четыре основных типа шаговых двигателей; Шаговый двигатель с постоянным магнитом, гибридный синхронный шаговый двигатель, шаговый двигатель с переменным сопротивлением и шаговый двигатель типа Лаве
Шаговые двигатели используются в системах позиционирования с контролем движения.
Двигатель постоянного тока против шагового двигателя
• Двигатели постоянного тока используют источники питания постоянного тока и делятся на два основных класса; щеточный и бесщеточный двигатель постоянного тока, тогда как шаговый двигатель — это бесщеточный двигатель постоянного тока с особыми характеристиками.
• Обычный двигатель постоянного тока (за исключением подключенных к сервомеханизмам) не может управлять положением ротора, в то время как шаговый двигатель может управлять положением ротора.
• Шагами шагового двигателя необходимо управлять с помощью устройства управления, такого как микроконтроллер, в то время как обычные двигатели постоянного тока не требуют таких внешних входов для работы.
Прямой пуск электромотора
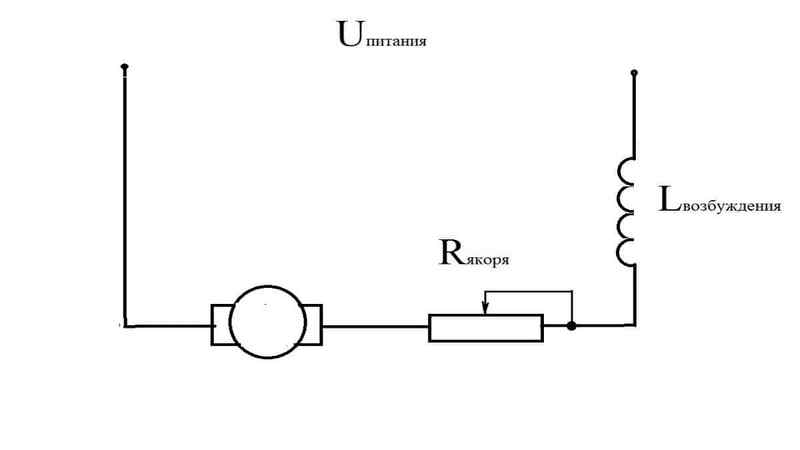
Маломощный электрический мотор (до одного киловатта) проще всего включить напрямую. Как и подключение трехфазного двигателя 380В, такой запуск электромотора постоянного тока П предусматривает подачу напряжения от источника питания непосредственно на рабочую обмотку. Поскольку отсутствует естественная компенсация за счет противодействующей электродвижущей силы, пусковой ток достигает максимального значения.
Если рассматривать прямое включение с точки зрения физики, то ситуация выглядит следующим образом. Изначально при старте мотора сила тока имеет значение, определяемое по формуле: І=U/R, где U – номинальное напряжение, R – сопротивление катушек. При этом токовая нагрузка достигает максимальной величины и может более чем в два раза превышать номинал.
Дальнейшее протекание тока инициирует возникновение электродвижущей силы противодействия, которая выступает в роли своеобразного тормоза, нормализующего стартовую нагрузку до номинальной мощности. Расчет силы тока теперь выполняется по другой формуле: І=U-Е/R, где Е – ЭДС противодействия.
В мощных силовых агрегатах, например, крановых двигателях ДК213МД2 сопротивление роторных обмоток может достигать одного Ома, что провоцирует возникновение пускового тока до 500 ампер, что в десятки раз превышает допустимое значение. Это может вызвать термическое опускание металла, оплавление и деформацию проводов, порчу контактных щеток и колец, а также создает повышенную опасность поражения электрическим током обслуживающего персонала. Поэтому для включения электромоторов средней (например, серии Д) и большой мощности рекомендуется использовать реостаты, специальные регуляторы или заведомо низкое напряжение. Прямой пуск для них противопоказан.
Конструкция коллектора
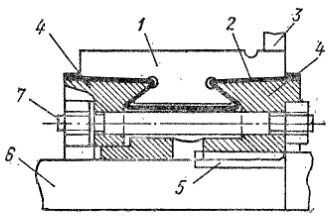
Рисунок 5. Коллектор
Устройство коллектора машины небольшой мощности показано на рисунке 5. Он состоит из медных пластин 1 толщиной 3 – 15 мм, изолированных друг от друга миканитовыми прокладками толщиной около 1 мм. Пластины имеют трапецеидальное сечение и вместе с прокладками составляют кольцо, которое скрепляется с помощью нажимных фланцев 4, стянутых стяжными болтами 7. От нажимных фланцев пластины коллектора изолируются миканитовыми коллекторными манжетами 2. Собранный коллектор крепится на валу 6 с помощью шпонки 5. К каждой пластине коллектора присоединяются соединительные проводники – “петушки” 3 – от обмотки якоря.
Подобное в принципе устройство имеют коллекторы подавляющего большинства машин. В последнее время в малых машинах коллекторные пластины с миканитовыми прокладками часто запрессовывают на пластмассу.
Режим генератора
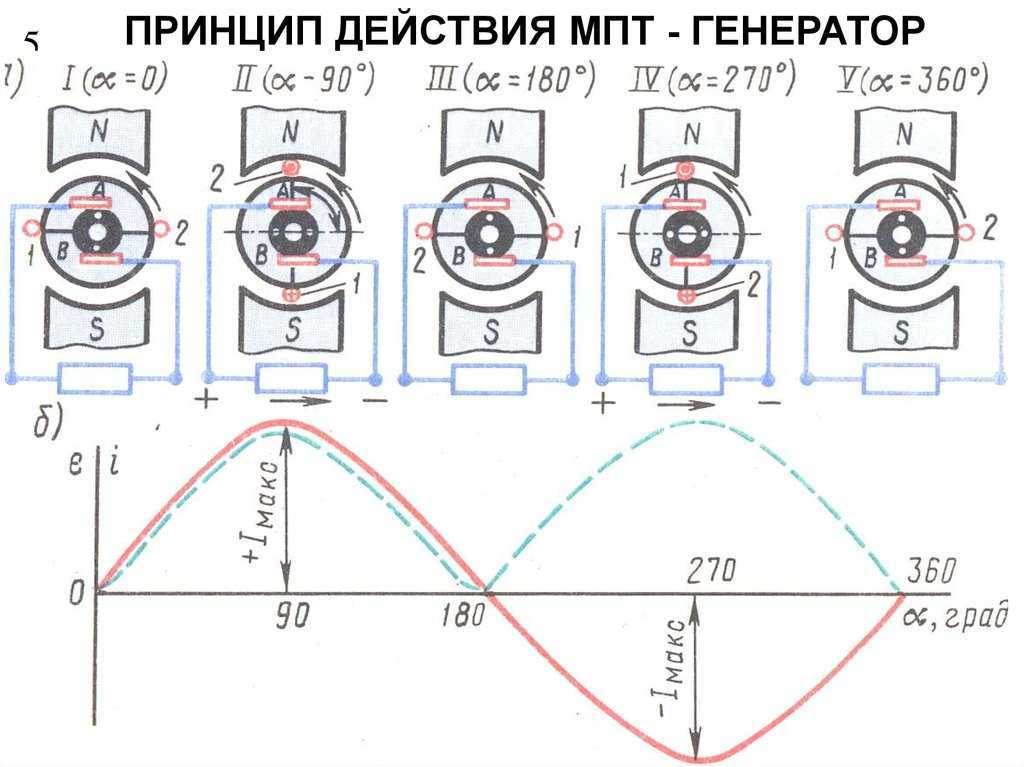
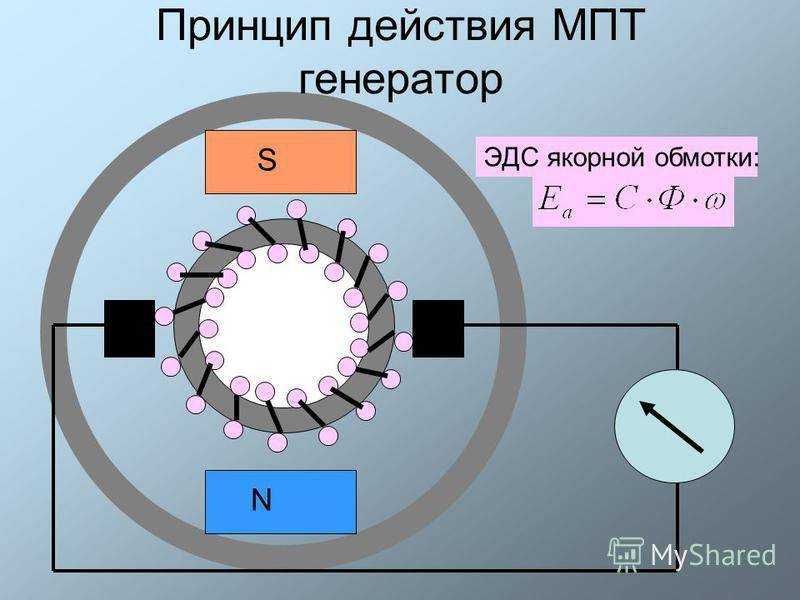
Рассмотрим сначала работу машины в режиме генератора.
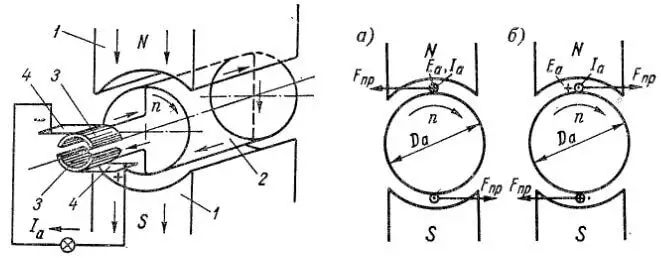
| Рисунок 1. Простейшая машина постоянного тока | Рисунок 2. Работа простейшей машины постоянного тока в режиме генератора (а) и двигателя (б) |
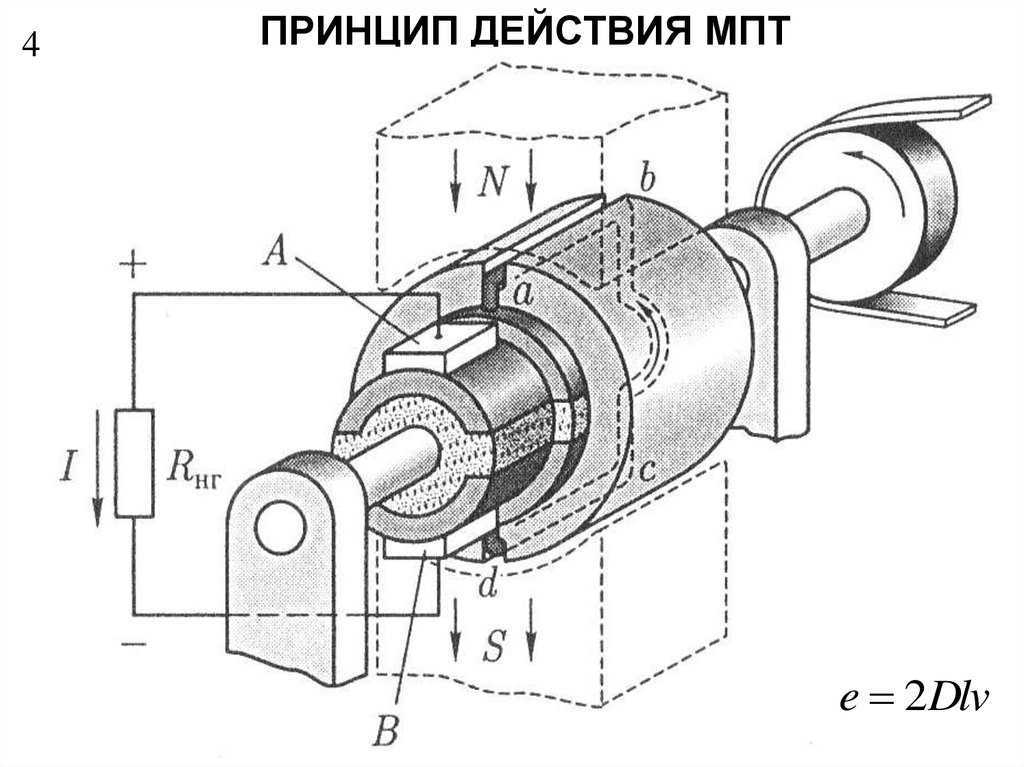
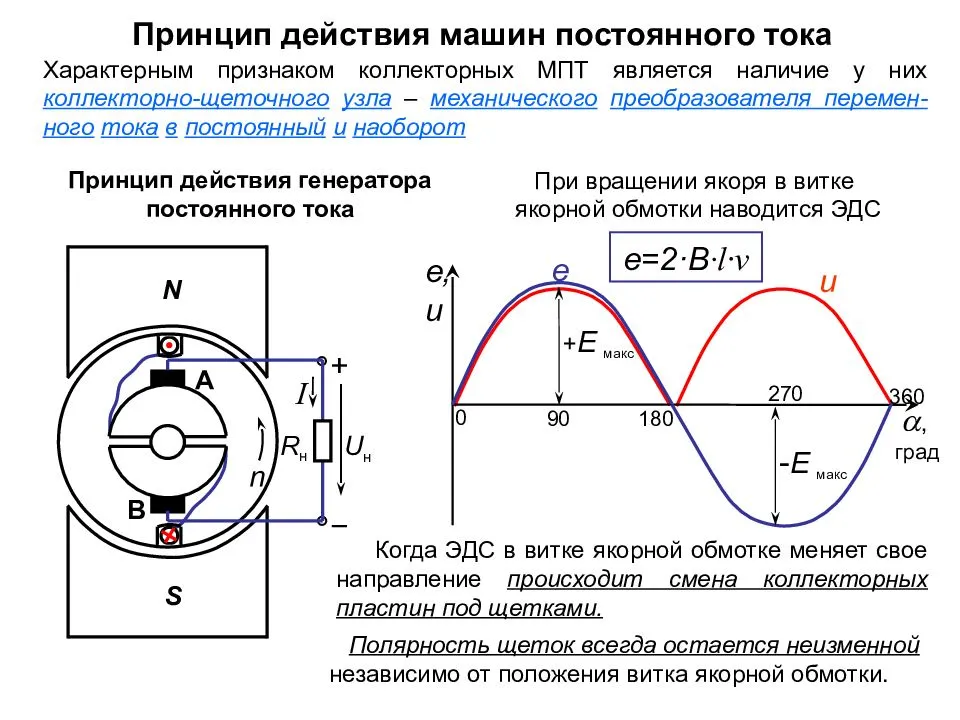
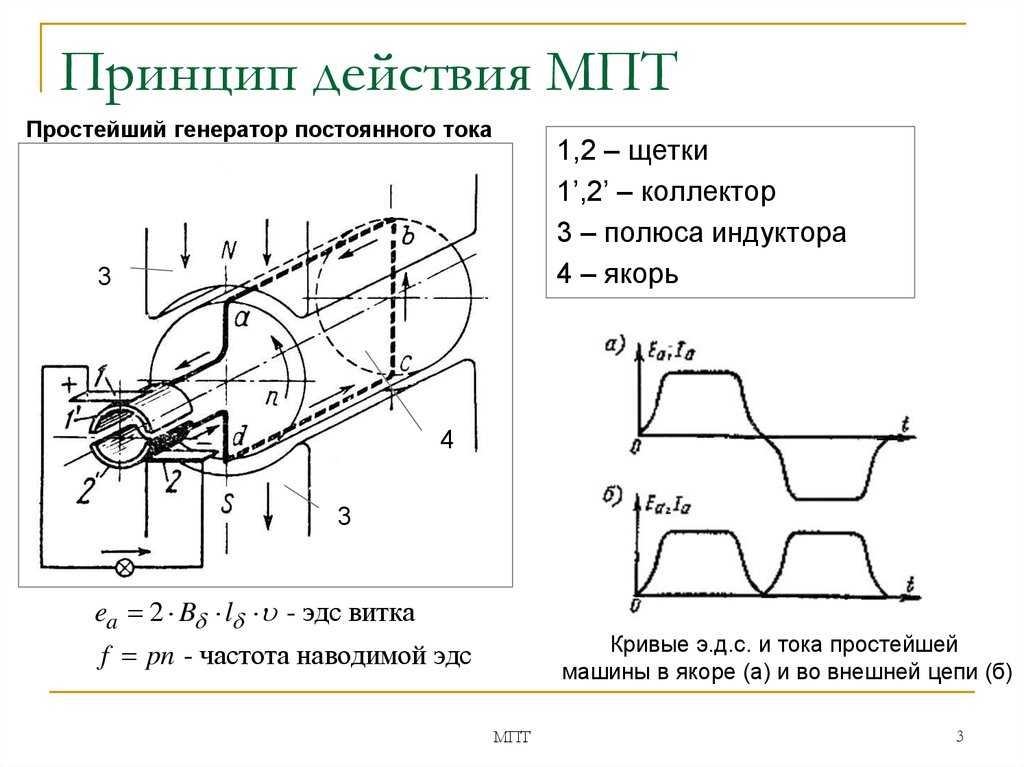
Предположим, что якорь машины (рисунки 1 и 2, а) приводится во вращение по часовой стрелке. Тогда в проводниках обмотки якоря индуктируется э. д. с., направление которой может быть определено по правилу правой руки (рисунок 3, а) и показано на рисунках 1 и 2, а. Поскольку поток полюсов предполагается неизменным, то эта э. д. с. индуктируется только вследствие вращения якоря и называется э. д. с. вращения.
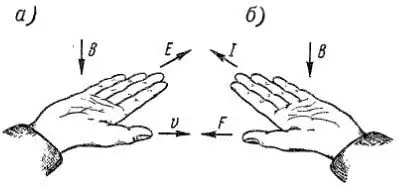
Рисунок 3. Правила правой (а) и левой (б) руки
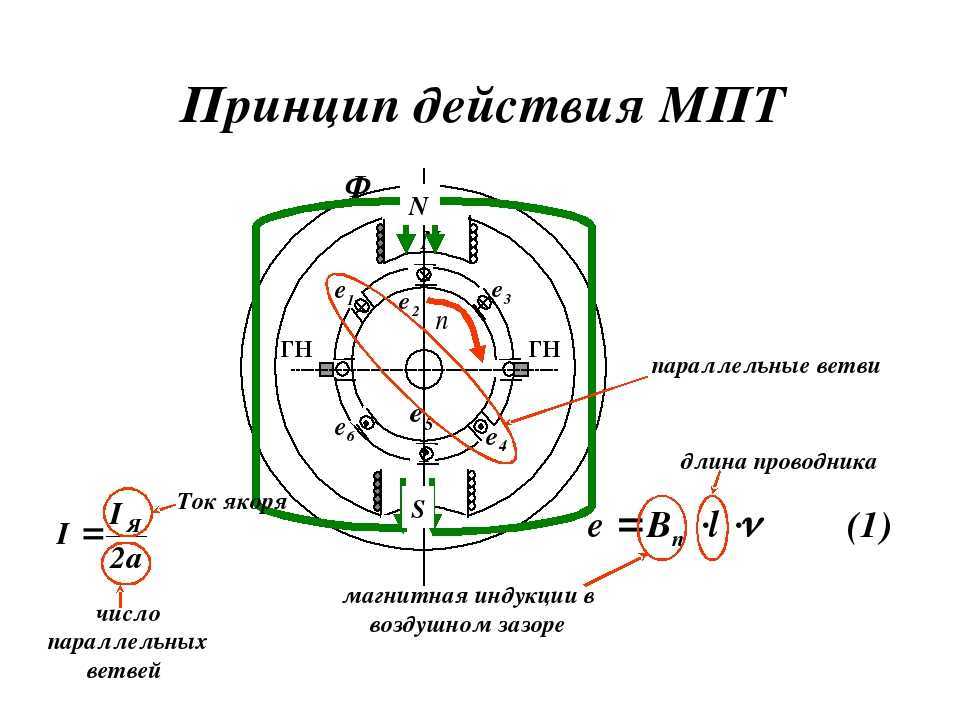
Значения индуктируемой в проводнике обмотки якоря э. д. с.
eпр = B × l × v,
где B – магнитная индукция в воздушном зазоре между полюсом и якорем в месте расположения проводника; l – активная длина проводника, то есть та длина, на протяжении которой он расположен в магнитном поле; v – линейная скорость движения проводника.
В обоих проводниках вследствие симметрии индуктируются одинаковые э. д. с., которые по контуру витка складываются, и поэтому полная э. д. с. якоря рассматриваемой машины
| Eа = 2 × eпр = 2 × B × l × v. | (1) |
Э. д. с. Eа является переменной, так как проводники обмотки якоря проходят попеременно под северным и южным полюсами, в результате чего направление э. д. с. в проводниках меняется. По форме кривая э. д. с. проводника в зависимости от времени t повторяет кривую распределения индукции B вдоль воздушного зазора (рисунок 4, а).
Частота э. д. с. f в двухполюсной машине равна скорости вращения якоря n, выраженной в оборотах в секунду:



f = n,
а в общем случае, когда машина имеет p пар полюсов с чередующейся полярностью,
| f = p × n | (2) |
Если обмотка якоря с помощью щеток замкнута через внешнюю цепь, то в этой цепи, а также в обмотке якоря возникает ток Iа. В обмотке якоря этот ток будет переменным, и кривая его по форме аналогична кривой э. д. с. (рисунок 4, а). Однако во внешней цепи направление тока будет постоянным, что объясняется действием коллектора. Действительно, при повороте якоря и коллектора (рисунок 1) на 90° и изменении направления э. д. с. в проводниках одновременно происходит также смена коллекторных пластин под щетками. Вследствие этого под верхней щеткой всегда будет находиться пластина, соединенная с проводником, расположенным под северным полюсом, а под нижней щеткой – пластина, соединенная с проводником, расположенным под южным полюсом. В результате этого полярность щеток и направление тока во внешней цепи остаются неизменными.
Рисунок 4. Кривые э. д. с. и тока простейшей машины в якоре (а) и во внешней цепи (б)
Таким образом, в генераторе коллектор является механическим выпрямителем, который преобразовывает переменный ток обмотки якоря в постоянный ток во внешней цепи.
Изменив знак второго полупериода кривой на рисунке 4, а, получим форму кривой тока и напряжения внешней цепи (рисунок 4, б). Образуемый во внешней цепи пульсирующий по значению ток малопригоден для практических целей. Для получения практически свободных от пульсаций тока и напряжения применяют более сложные по устройству обмотку якоря и коллектор. Однако основные свойства машины постоянного тока могут быть установлены на примере рассматриваемой здесь простейшей машины.
Напряжение постоянного тока на зажимах якоря генератора будет меньше Eа на величину падения напряжения в сопротивлении обмотки якоря rа:
| Uа = Eа – Iа × rа. | (3) |
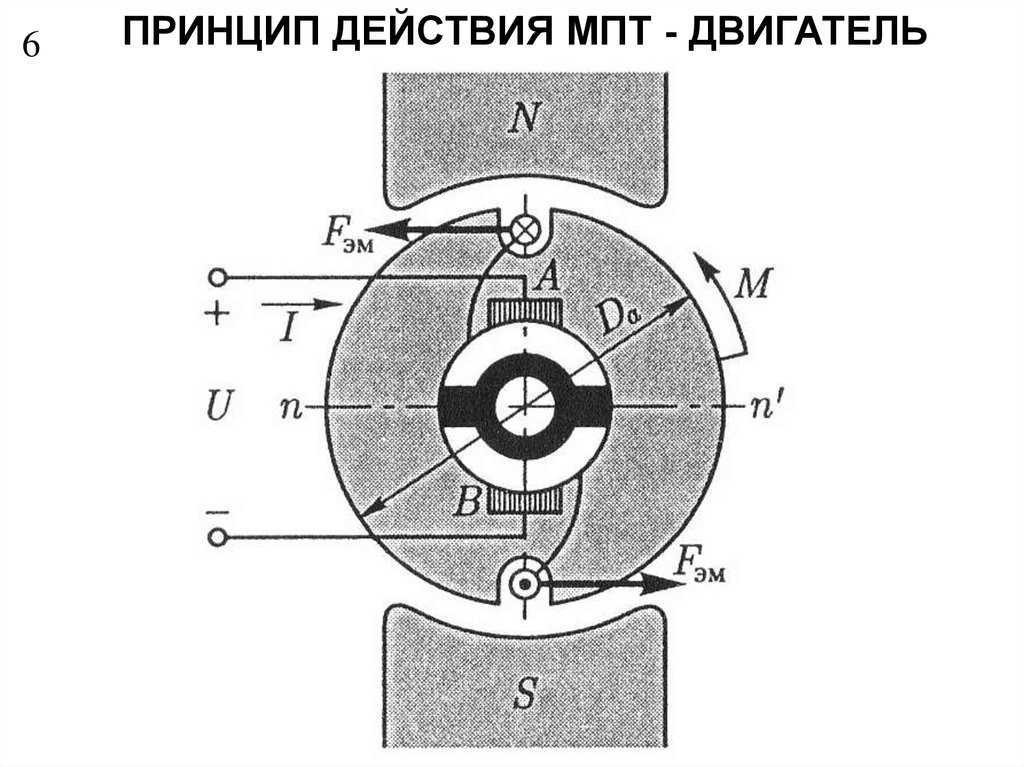
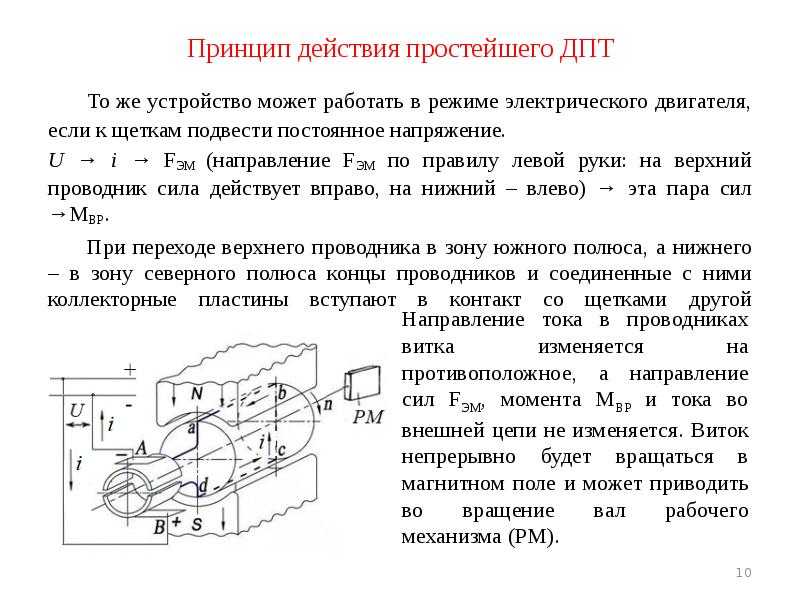
Проводники обмотки якоря Iа с током находятся в магнитном поле, и поэтому на них будут действовать электромагнитные силы (рисунок 2, а)
| Fпр = B × l × Iа, | (4) |
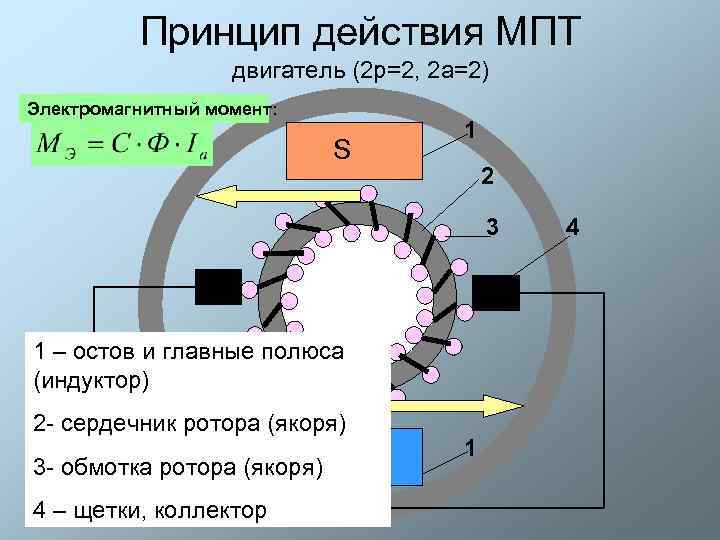
направление которых определяется по правилу левой руки (рисунок 3, б). Эти силы создают механический момент , который называется электромагнитным моментом и на рисунке 2, а равен
| Mэм = Fпр × Dа = B × l × Dа × Iа, | (5) |
где Dа – диаметр якоря. Как видно из рисунка 2, а, в режиме генератора этот момент действует против направления вращения якоря и является тормозящим.
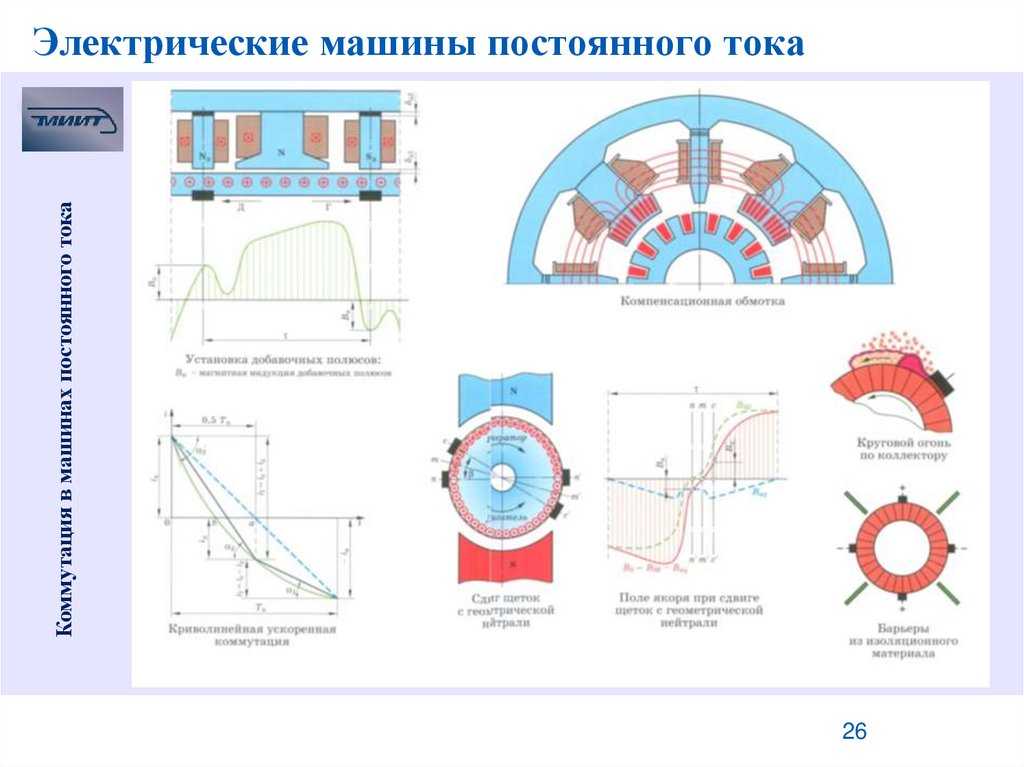
Способы борьбы с реакцией якоря
Наиболее простым и первым из появившихся способов стало увеличение воздушного зазора от середины к краям наконечников полюсов, т. е. выполнение расходящегося зазора. При этом увеличивалось магнитное сопротивление потоку реакции якоря, и воздействие его на поле возбуждения уменьшалось. Но сопротивление росло и для потока возбуждения, что вынуждало увеличивать габариты катушек на главных полюсах.
Для ослабления потока якоря при изготовлении главных полюсов используется электротехническая сталь с магнитной анизотропией ее свойств (магнитной проницаемости) вдоль и поперек оси полюсов. Полюсы из такой стали хорошо проводят продольный поток возбуждения и плохо — поперечный поток якоря. Однако такая сталь очень дорога, а ее свойства сильно зависят от температуры и изменяются с течением времени.
Наконец был найден радикальный способ борьбы с реакцией якоря машины постоянного тока. Устройство и принцип действия ее при этом почти не изменились, но добавилась еще одна обмотка – компенсационная. Она размещается в пазах, выполняемых в наконечниках главных полюсов (или в пазах статора вместе с обмоткой возбуждения при неявнополюсной конструкции), как показано на рисунке ниже, и присоединяется последовательно к обмотке якоря, т. е. по ним проходит одинаковый ток.
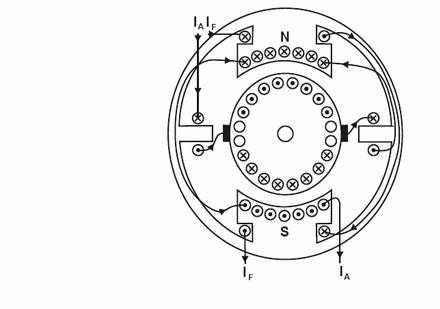
Однако направление обтекания им витков компенсационной обмотки выбрано таким образом, что возбуждаемый ею магнитный поток направлен навстречу потоку реакции якоря и компенсирует его.
Все современные электрические машины постоянного тока, имеющие среднюю и большую мощность, оснащаются такой обмоткой.
Слайд 19 Пуск ДПТ В момент пуска ток в цепи

ток якоря может в 50…70 раз превышать номинальный ток двигателя,
что недопустимо, поскольку приведет к сильному искрению и разрушению коллектора. Кроме того, при таком токе возникает недопустимо большой момент двигателя, а при частых пусках возможен перегрев обмотки якоря. Для уменьшения пускового тока в цепь якоря последовательно включается пусковой реостат RП . По мере увеличения частоты вращения сопротивление реостата RП уменьшают до нуля. Если пуск двигателя автоматизирован, то пусковой реостат выполняют из нескольких ступеней, которые выключают последовательно по мере увеличения частоты вращения. При такой схеме пуска пусковой ток якоря определяется соотношением.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.



где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Конструкция щеточного аппарата
Для отвода тока от вращающегося коллектора и подвода к нему тока применяется щеточный аппарат, который состоит из щеток, щеткодержателей, щеточных пальцев, щеточной траверсы и токособирающих шин.
Одна из типичных конструкций щеткодержателя показана на рисунке 5. Щеткодержатели укрепляются на щеточных пальцах. На каждом щеточном пальце обычно помещают несколько или целый ряд щеткодержателей со щетками, которые работают параллельно. Щеточные пальцы, число которых обычно равно числу главных полюсов, крепятся к щеточной траверсе (рисунок 7)
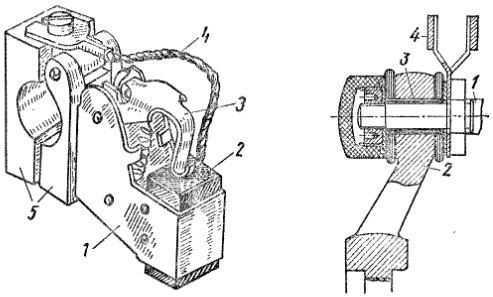
Рисунок 6. Щеткодержатель со щеткой 1 – обойма щеткодержателя; 2 – щетка; 3 – нажимная пружина; 4 – токоведущий кабель; 5 – колодки для крепления к пальцу
Рисунок 7. Крепление щеточного пальца к траверсе 1 – палец; 2 – траверса; 3 – изоляция; 4 – токособирательная шина
и электрически изолируются от нее. Траверса крепится к неподвижной части машины: в машинах малой и средней мощности – к втулке подшипникового щита, а в крупных машинах – к станине. Обычно предусматривается возможность поворота траверсы для установки щеток в правильное положение. Полярности щеточных пальцев чередуются, и все пальцы одной полярности соединяются между собой сборными шинами. Шины с помощью отводов соединяются с выводными зажимами или с другими обмотками машины.
Коллектор и щеточный аппарат являются весьма ответственными узлами машины, от конструкции и качества изготовления которых в большой степени зависит бесперебойная работа машины и надежность электрического контакта между коллектором и щетками.
106 thoughts on “Двигатель постоянного тока. Характеристики и регулирование”
Я очень ждал статей про двигатели. Специалист по электроприводу научил нас как работать с AVR, а про моторчики нифига не написал. Еще будут статьи на эту тему?
Мне порвала шаблон обратная зависимость между магнитным потоком возбуждения и скоростью вращения. По формуле я вижу, что это так, но понять не могу. Особенно удивил уход вразнос при отключении обмотки возбуждения. Если нет магнитного потока статора, то от чего «отталкивается» ротор? Как двигатель может вообще работать в таком режиме?
Отталкивается от остаточного возбуждения. Намагниченности полюсов
Но ты обрати внимание, что момент там тоже уходит в ноль. Так что либо отталкиваться бешеным током, либо снижать момент до нуля. Да, про момент я заметил
Понятно, что разгон будет происходить только без нагрузки и только, если источник питания способен выдать нужный ток
Да, про момент я заметил. Понятно, что разгон будет происходить только без нагрузки и только, если источник питания способен выдать нужный ток.
Статьи может быть будут еще, не скажу. Я, на самом деле, за 7 лет изрядно эту тему подзабыл за неиспользованием. Особенно касаемо всякого продвинутого регулирования и динамики привода. Так что не такой я уж специалист по приводу
Можно и без продвинутого регулирования для начала. Меня совсем базовые вещи интересуют. Типа, какие бывают способы управления и, соответственно, какие драйверы их реализуют, чем отличаются, плюсы, минусы, подводные камни. Для коллекторных и бесколлекторных двигателей постоянного тока
На что следует обратить внимание при разработке схем с электродвигателями, чтобы не сжечь все нафиг. В общем, такая статья в раздел «Начинающим». Но и более емкие статьи я бы с удовольствием прочитал
Но и более емкие статьи я бы с удовольствием прочитал.
Ну базовые вещи я уже описал А дальше додумываешь сам. Напряжение можно рулить ШИМом. Можно обратную связь по току-моменту замутить. Обращаться с ними также как с любой индуктивностью, о чем я тоже уже писал. Не расписывал только H-мосты самодельные. Но тут тема такая, на всех не угодишь, слишком они разные бывают.



Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ. Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ. Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ. Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ. Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ.
Модели — не игрушки. Совсем другие требования, и другие цены. А в дешевых игрушках, — как правило, дешевые коллекторные движки с проволочными щетками. Да и в самых дешевых моделях вертолета с соосными винтами (по сути, те же игрушки) — тоже коллекторные.
Имеется двигатель постоянного тока мощностью 60Вт, напряжение питания 48В. Как его можно переделать чтобы питать от 12В не потеряв в мощности?
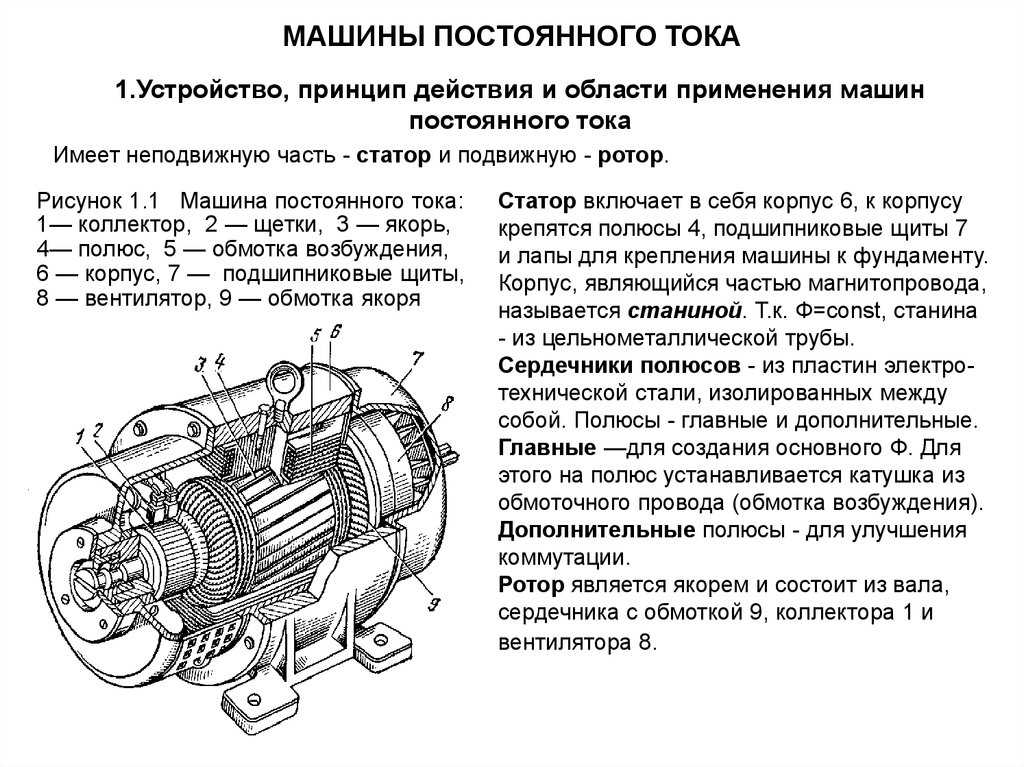
Устройство
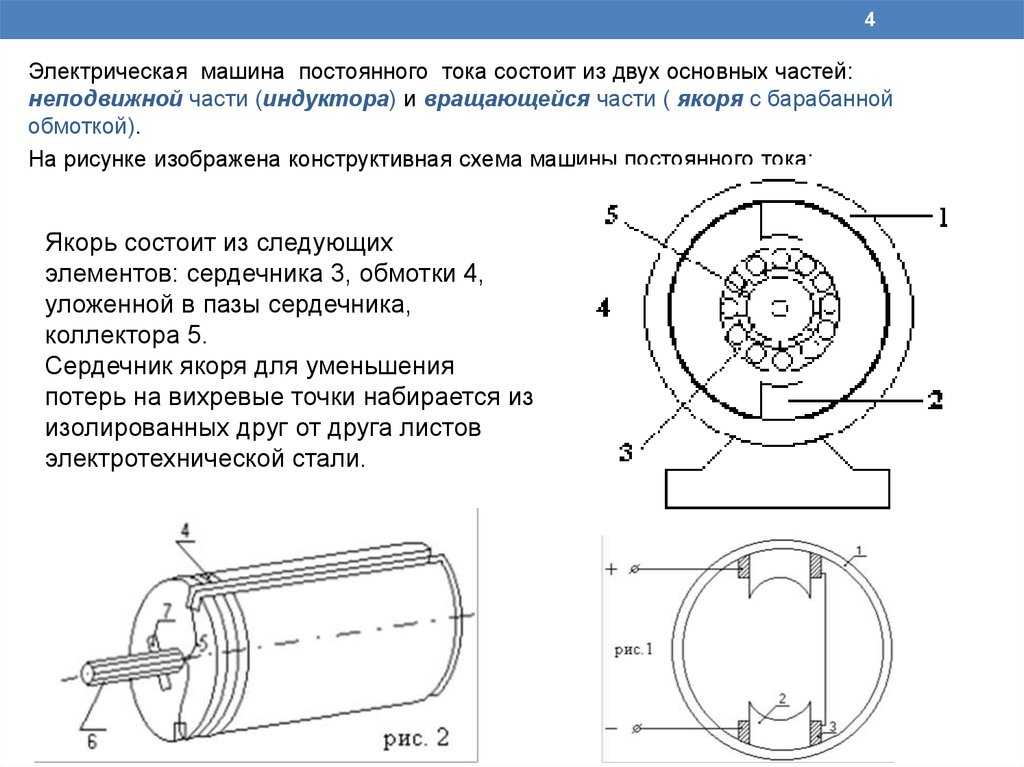
МПТ состоят из двух частей:
- индуктор: неподвижная часть;
- якорь: вращается внутри индуктора.
В машинах переменного тока индуктор и якорь принято называть, соответственно, статором и ротором. Индуктор создает первичное магнитное поле, воздействующее на якорь с целью навести в нем ЭДС (генератор) либо заставить его вращаться (двигатель).
В маломощных МПТ индуктором иногда выступает постоянный магнит, но чаще с целью добиться однородного магнитного потока применяют электромагнит, то есть систему катушек, создающих при протекании через них постоянного тока магнитное поле обмотка возбуждения (ОВ).
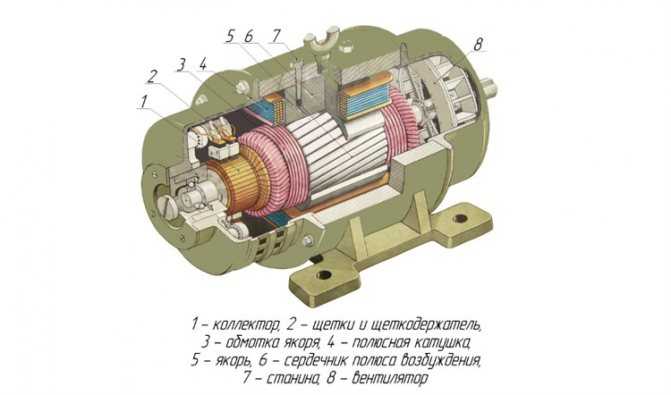
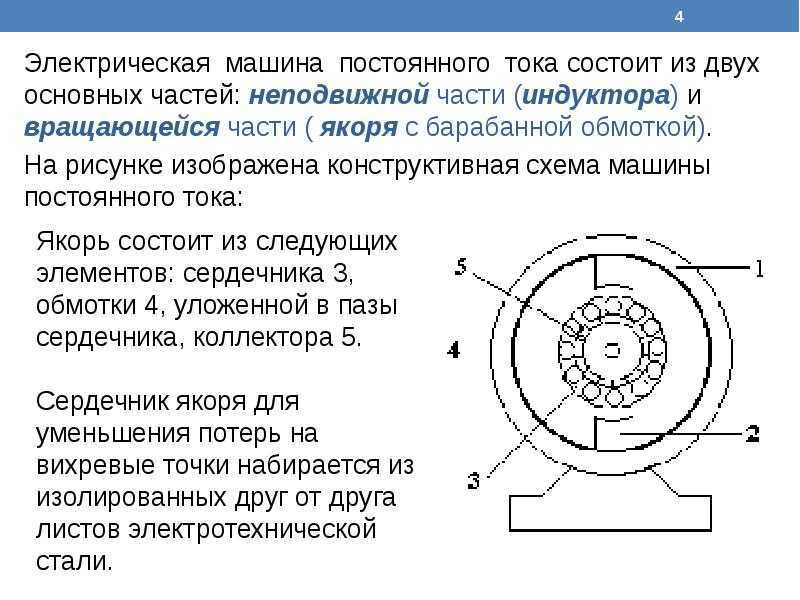
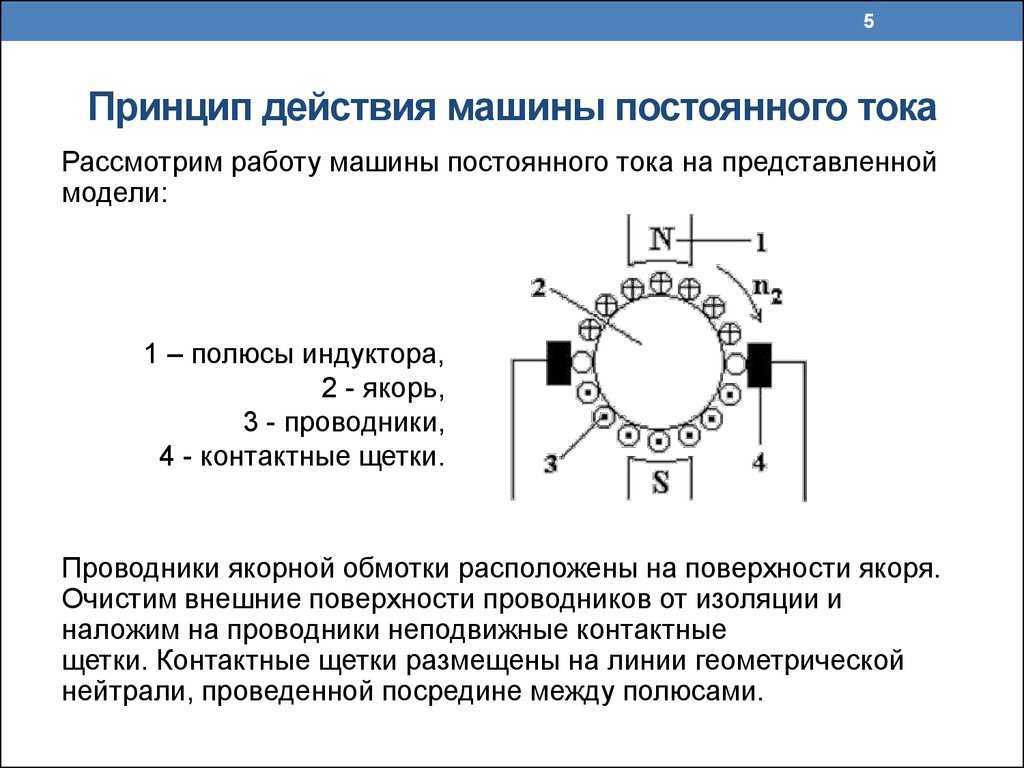
Устройство машины постоянного тока
Каждая катушка намотана на сердечник, вместе они образуют магнитный полюс. Для надлежащего распределения магнитного потока сердечник снабжен специальным наконечником. Основных полюсов может быть несколько. Помимо них применяются добавочные, обеспечивающие безыскровую работу коллектора. Последний представляет собой важный элемент МПТ, его функция будет рассмотрена ниже.
Ярмо индуктора одновременно является станиной МПТ, потому его так обычно и называют. К нему крепятся магнитные полюсы и подшипниковые щиты (вращается вал якоря). В сущности, ярмо — это лишь часть станины, по которой замыкаются магнитные потоки основных и добавочных полюсов.

Якорь представляет собой сердечник с пазами, содержащими уложенный в определенном порядке провод — обмотку. Сердечник закреплен на валу, вращающемся в подшипниках. Здесь же закреплен коллектор.
Коллектор обеспечивает возможность подачи питания на обмотку вращающегося якоря. Он является подвижной частью так называемого скользящего коллекторного контакта, и состоит из нескольких изолированных друг от друга сегментообразных медных пластин, закрепленных в виде цилиндра на валу якоря. Неподвижная часть контакта представлена графитовыми или медно-графитовыми щетками, закрепленными в щеткодержателях. Пружинами они придавливаются к пластинам коллектора.