
FPGA in the cloud
В облачных вычислениях FPGA применяются для быстрого счета, ускорения сетевого трафика и осуществления доступа к массивам данных. Сюда же можно отнести использование FPGA для высокочастотной торговли на биржах. В серверы вставляются платы FPGA с PCI Express и оптическим сетевым интерфейсом производства Intel (Altera) или .
На FPGA отлично ложатся криптографические алгоритмы, сравнение последовательностей ДНК и научные задачи вроде молекулярной динамики. В Microsoft давно используют FPGA для ускорения поискового сервиса Bing, а также для организации Software Defined Networking внутри облака Azure.
Бум машинного обучения тоже не обошел стороной FPGA. Компании Xilinx и Intel предлагают средства на основе FPGA для работы с глубокими нейросетями. Они позволяют получать прошивки FPGA, которые реализуют ту или иную сеть напрямую из фреймворков вроде Caffe и TensorFlow.
Причем это все можно попробовать, не выходя из дома и используя облачные сервисы. Например, в Amazon можно арендовать виртуальную машину с доступом к плате FPGA и любым средствам разработки, в том числе и machine learning.
Радиолюбитель
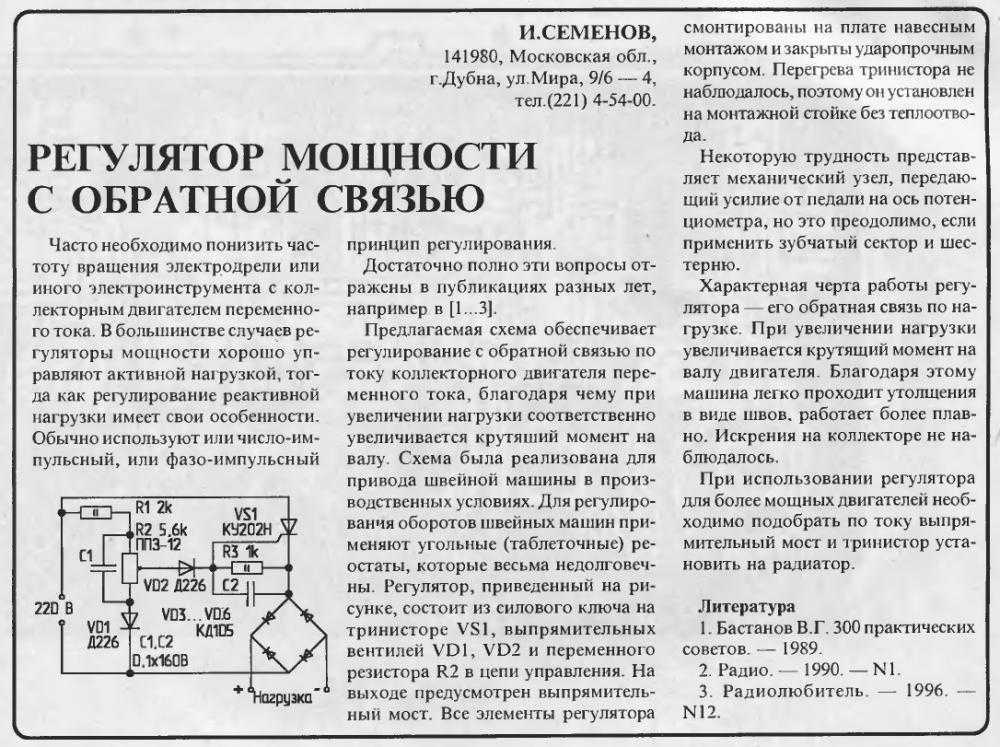
Регулятор мощности SL-1800
Регулятор мощности SL-1800 можно встретить во многих недорогих китайских пылесосах.
Ремонт этого регулятора, не смотря на кажущуюся простоту схемотехники, невозможен – найти микросхему управления симистором практически невозможно. Силовая часть регулятора мощности SL-1800 выполнена на микросхеме регуляторе 501B-8P и симисторе BTA16-600B. Тут только два варианта событий: – купить плату регулятора в сборе, стоит она в районе 2000-2500 руб., что иногда составляет половину стоимости нового пылесоса. — собрать простейший регулятор мощности взамен оригинального регулятора. Такое творчество обойдется только запчастями в 200-250 руб.
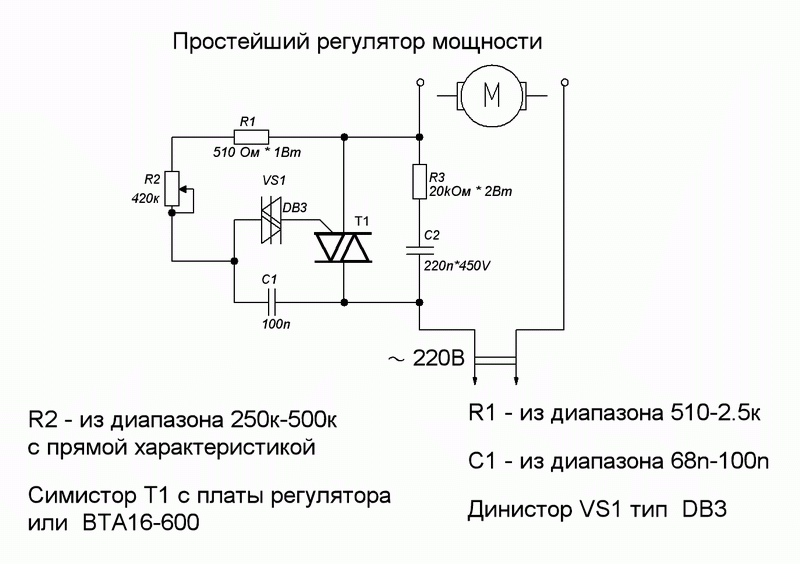
Простейший регулятор мощности (коллекторный двигатель, лампа, нагреватель)
Важно. Перед заменой по любому из вариантов, убедиться, что щетки коллекторного двигателя изношены не более 50%, в противном случае есть шанс повторного ремонта
Тут следует добавить, стоимость работ по замене/диагностике составит еще 600 руб
, что может свести целесообразность ремонта к бесполезной трате времени. Однако если ремонт делается «для себя» и владение паяльником не вызывает благоговейный ужас, то можно взяться за восстановление работоспособности. Но все это теория, на практике все оказывается несколько проще, вот уже второй пылесос попадает в руки с одной неисправностью, возможно — это типовая неисправность
Тут следует добавить, стоимость работ по замене/диагностике составит еще 600 руб. , что может свести целесообразность ремонта к бесполезной трате времени. Однако если ремонт делается «для себя» и владение паяльником не вызывает благоговейный ужас, то можно взяться за восстановление работоспособности. Но все это теория, на практике все оказывается несколько проще, вот уже второй пылесос попадает в руки с одной неисправностью, возможно — это типовая неисправность
Неисправность со слов заказчика.
Согласно шильдика «пациента», мощность пылесоса не превышает 1800 Вт.
Пылесос Zanussi ZANS710 не включается или включается, но во время работы самопроизвольно выключается.
Первичная диагностика. Проверяем щетки коллекторного двигателя — щетки в идеальном состоянии, неисправна плата регулятора мощности.
Пылесос Zanussi ZANS710 в разобранном состоянии.
Ремонт. Так как подобная неисправность уже встречалась на другом пылесосе, то первым делом проверяем электролитический конденсатор Е1(220мкФ*16В), который имеет тенденцию обламываться от вибрации под собственным весом. Этот случай не стал исключением, несмотря на полную исправность конденсатора Е1(220мкФ*16В), его все таки заменяем, работоспособность пылесоса восстановлена.
Источник
Недостатки ПЛИС
FPGA имеет свои преимущества и приложения, но с некоторыми недостатками. Эти недостатки объясняются несколькими факторами, такими как экономика, дизайн и разработка. В настоящее время технология FPGA имеет следующие недостатки:
Требование высокой мощности
Большинство плат FPGA питаются от объединительной платы 48 В. Высокая потребляемая мощность и высокое энергопотребление плат FPGA делают их непригодными для многих применений. С другой стороны, большинству плат микроконтроллеров для работы требуется питание 5 В или 3,3 В. Это делает микроконтроллеры очевидным выбором для разработки любого портативного встраиваемого устройства с батарейным питанием.
Волатильность
Цифровой сигнал передается на плату FPGA в виде данных конфигурации. Когда плата включена, плата настраивается соответствующим образом и после этого начинает работать. Данные конфигурации либо хранятся во флэш-памяти, либо передаются процессором через интерфейс граничного сканирования (JTAG) в ведомом режиме. Данные конфигурации теряются при выключении питания платы. Этот изменчивый характер большинства плат FPGA делает их непригодными для приложений, в которых плата может испытывать перебои в подаче питания или страдать от потери питания.
Время запуска
Платы FPGA загружают данные конфигурации каждый раз при включении питания. Это значительно увеличивает время запуска. Однако после загрузки данных конфигурации плата FPGA может работать быстрее, чем микроконтроллер. Но время запуска, в случае плат FPGA, приводит к их отказу в приложениях, требующих критичных по времени действий сразу после включения встроенного устройства. Из-за времени запуска, а также нестабильности данных конфигурации платы FPGA не подходят для приложений, в которых встроенное устройство часто включается и выключается. Кроме того, невозможно постоянно держать плату FPGA включенной во встроенном устройстве из-за ее высокой потребляемой мощности.
Большое количество выводов
Микросхемы FPGA обычно имеют большое количество выводов. Вот почему FPGA не предназначена для встроенных приложений с ограничениями по размеру, где вычислительный процессор или контроллер должны быть как можно более компактными с минимальным количеством выводов. Напротив, существует множество доступных микроконтроллеров с 8 контактами или даже меньше, поэтому их можно легко использовать в небольшом гаджете или устройстве.
Сложность
Работать на ПЛИС не так просто, как на микроконтроллере. Прежде чем начать работу с FPGA, инженер должен иметь подробные знания о цифровом дизайне и архитектуре компьютера. Кроме того, VHDL или Verilog более сложны для изучения по сравнению с любым языком программирования высокого уровня для разработки программного обеспечения или даже языком ассемблера. Хотя большинство инструментов, необходимых для разработки в FPGA, доступны бесплатно, и есть много плат FPGA, доступных по разумной цене (около 50 долларов), инструменты сложны в использовании, и по-прежнему сложно сделать выбор среди доступных плат FPGA. Есть также много сложностей, ловушек и предостережений в цифровом дизайне, которые можно изучить только на практике.
Ограничения дизайна
С FPGA можно соединить логические блоки только для цифрового сигнала. Но на уровне ворот нет контроля и обычно синтез нестандартный. Тем не менее, FPGA очень полезен при тестировании архитектуры или проекта ASIC на ранней стадии.
Долговечность
ИС ПЛИС имеет короткий срок службы по сравнению с микроконтроллером. В то время как микроконтроллеры могут работать внутри устройства десятилетиями, микросхема FPGA во встроенном устройстве может потребовать замены через 2 или 5 лет.


Высокая стоимость, нестабильность, время запуска, высокое энергопотребление, большое количество выводов, короткий срок службы и конструктивные ограничения, несмотря на сложный процесс разработки, сделали микросхемы FPGA менее популярными. Их можно увидеть только в устройствах высокой мощности, которые требуют специальной архитектуры, специальных периферийных устройств и выполнения критического машинного кода посредством параллельной обработки.
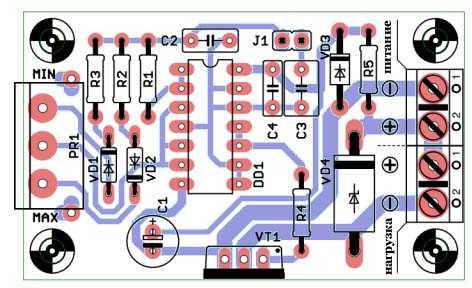
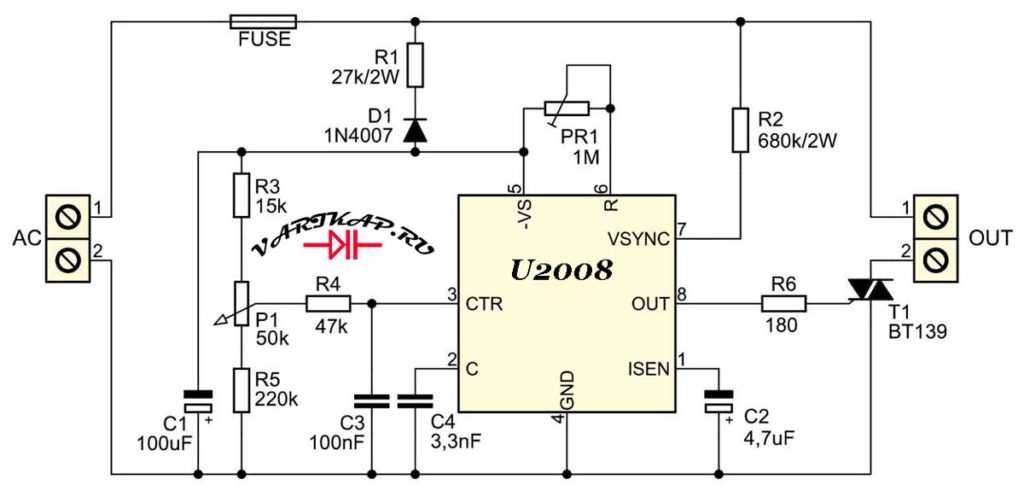
Описание регулятор оборотов электродвигателя
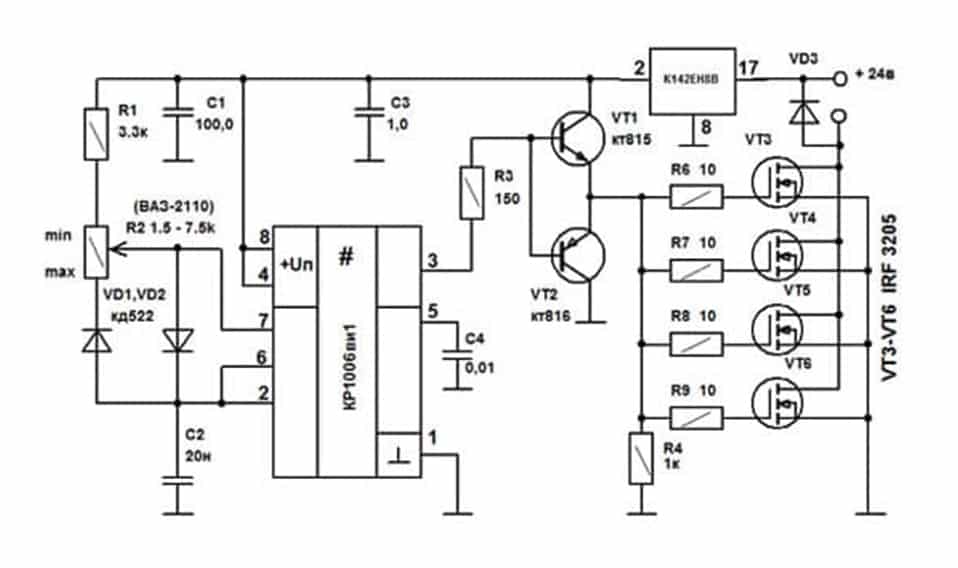
Логические элементы DD1.1, DD1.2 (CD4011) используются в виде классического ШИМ генератора. Резистор R1 выполняет лишь защитную функцию. Частота генератора определяется емкостью С2 или С3 и сопротивлением потенциометра PR1 вместе с R2, R3. Параллельно соединенные логические элементы DD1.3, DD1.4 управляют транзистором MOSFET (VT1).
При использовании в схеме транзистора MOSFET, резистор R4 не нужен и на его место устанавливается перемычка. Данный резистор (R4) предусмотрен только на тот случай, если вместо MOSFET будет установлен транзистор Дарлингтона структуры n-p-n, например, BD649. Тогда для ограничения тока базы резистор R4 должен иметь значение 1к…2,2к.
Потенциометр PR1 позволяет изменять коэффициент заполнения генерируемого сигнала в очень широких пределах, примерно от 1% до примерно 99%. Сигнал с генератора периодически открывает и закрывает транзистор VТ1, а средняя мощность, поступающая на нагрузку (разъем Z2), зависит от коэффициента заполнения сигнала. Таким образом, потенциометр PR1 позволяет осуществить плавную регулировку мощности, подаваемую на нагрузку.
Включенный „наоборот” диод VD4 незаменим при использовании индуктивной нагрузки (например, электродвигатель). Без диода VD4, в момент отключения, на стоке транзистора VT1 могут возникнуть импульсы, значительно превышающие допустимо значение для данного транзистора и это может вывести его из строя.
Благодаря импульсной работе, потери мощности на транзисторе VT1 невелики и поэтому не требует радиатора, даже при токах порядка нескольких ампер, то есть мощности нагрузки до 100 Вт. Следует иметь в виду, что устройство является регулятором мощности, а не стабилизатором оборотов двигателя, поэтому обороты двигателя зависят от его нагрузки.
ВНИМАНИЕ! Схема регулирует мощность в режиме пульсаций, подавая на нагрузку меандр. Такие импульсы могут быть источником электромагнитных помех
Для минимизации помех необходимо использовать по возможности короткие соединения между блоком и нагрузкой.
Соединительный шнур должен иметь вид витой пары (обычные два скрученные между провода). Также рекомендуется дополнительно подключить электролитический конденсатор (набор конденсаторов) емкостью 1000… 10000мк к разъему питания Z1.
Блок питания 0…30В/3A
Набор для сборки регулируемого блока питания…
Подробнее
В схеме предусмотрен дополнительный конденсатор C3, подключаемый с помощью перемычки J1. Включение этого конденсатора вызывает снижение частоты работы генератора с 700Гц до примерно 25Гц. Это полезно с точки зрения генерируемых электромагнитных помех.
Хотя в некоторых случаях снижение частоты может быть неприемлемо, например, это может привести к заметному мерцанию лампы. Тогда необходимо самостоятельно подобрать оптимальную емкость C3.
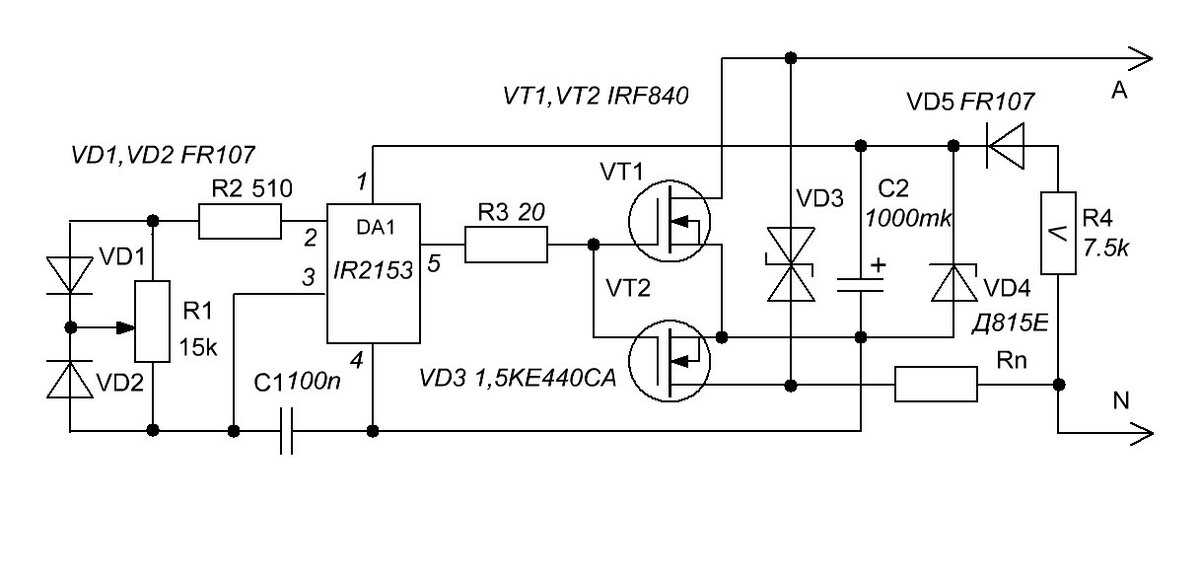
Инвертор 12 В/ 220 В
Инвертор с чистой синусоидой, может обеспечивать питание переменно…
Подробнее
Как выбрать?
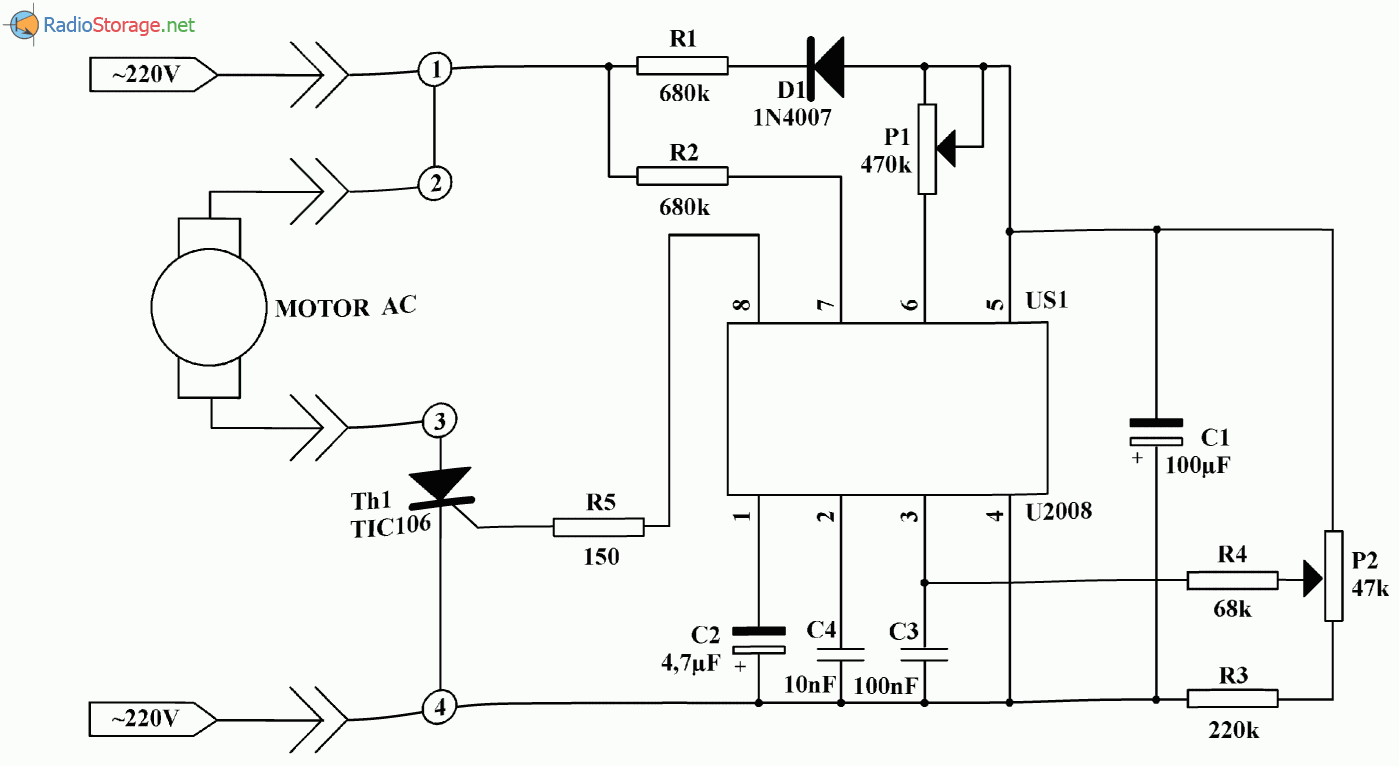
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Простой ШИМ регулятор на NE555
С аналоговым интегральным таймером SE555/NE555 (КР1006), выпускаемым компанией Signetics Corporation с далекого 1971 года прекрасно знакомо большинство советских и зарубежных радиолюбителей. Трудно перечислить, для каких только целей не использовалась эта недорогая, но многофункциональная микросхема за почти полувековой период своего существования. Однако, даже несмотря на быстрое развитие электронной промышленности в последние годы, она по-прежнему продолжает пользоваться популярностью и выпускается в значительных объемах.Предлагаемая Jericho Uno простенькая схемка автомобильного ШИМ-регулятора – не профессиональная, полностью отлаженная разработка, отличающаяся своей безопасностью и надежностью. Это всего лишь небольшой дешевый эксперимент, собранный на доступных бюджетных деталях и вполне удовлетворяющий минимальным требованиям. Поэтому его разработчик не берет на себя ответственности за все то, что может произойти с вашим оборудованием при эксплуатации смоделированной схемы.
ReLu
Следующая в нашем списке — активационная функция ReLu,
A(x) = max(0,x)
Пользуясь определением, становится понятно, что ReLu возвращает значение х, если х положительно, и в противном случае. Схема работы приведена ниже.
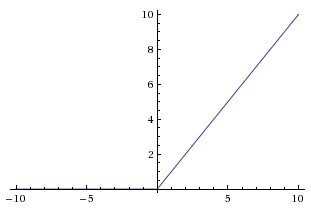
На первый взгляд кажется, что ReLu имеет все те же проблемы, что и линейная функция, так как ReLu линейна в первом квадранте. Но на самом деле, ReLu нелинейна по своей природе, а комбинация ReLu также нелинейна! (На самом деле, такая функция является хорошим аппроксиматором, так как любая функция может быть аппроксимирована комбинацией ReLu). Это означает, что мы можем стэкать слои. Область допустимых значений ReLu — [0,inf), то есть активация может “взорваться”.
Следующий пункт — разреженность активации. Представим большую нейронную сеть с множеством нейронов. Использование сигмоиды или гиперболического тангенса будет влечь за собой активацию всех нейронов аналоговым способом. Это означает, что почти все активации должны быть обработаны для описания выхода сети. Другими словами, активация плотная, а это затратно. В идеале мы хотим, чтобы некоторые нейроны не были активированы, это сделало бы активации разреженными и эффективными.
ReLu позволяет это сделать. Представим сеть со случайно инициализированными весами (или нормализированными), в которой примерно 50% активаций равны из-за характеристик ReLu (возвращает для отрицательных значений х). В такой сети включается меньшее количество нейронов (разреженная активация), а сама сеть становится легче. Отлично, кажется, что ReLu подходит нам по всем параметрам. Но ничто не безупречно, в том числе и ReLu.
Из-за того, что часть ReLu представляет из себя горизонтальную линию (для отрицательных значений X), градиент на этой части равен . Из-за равенства нулю градиента, веса не будут корректироваться во время спуска. Это означает, что пребывающие в таком состоянии нейроны не будут реагировать на изменения в ошибке/входных данных (просто потому, что градиент равен нулю, ничего не будет меняться). Такое явление называется проблемой умирающего ReLu (Dying ReLu problem). Из-за этой проблемы некоторые нейроны просто выключатся и не будут отвечать, делая значительную часть нейросети пассивной. Однако существуют вариации ReLu, которые помогают эту проблему избежать. Например, имеет смысл заменить горизонтальную часть функции на линейную. Если выражение для линейной функции задается выражением y = 0.01x для области x < 0, линия слегка отклоняется от горизонтального положения. Существует и другие способы избежать нулевого градиента. Основная идея здесь — сделать градиент неравным нулю и постепенно восстанавливать его во время тренировки.
ReLu менее требовательно к вычислительным ресурсам, чем гиперболический тангенс или сигмоида, так как производит более простые математические операции. Поэтому имеет смысл использовать ReLu при создании глубоких нейронных сетей.
Общие сведения об ИИ
У большинства людей ИИ ассоциируется в первую очередь с устройствами распознавания лиц, в которых используются мощные графические процессоры. Это не совсем так: в современном мире ИИ может быть представлен и проще. Например, классификацией спама в электронном почтовом ящике или алгоритмом автозаполнения в поисковой программе интернет-браузера. В целом область применения ИИ очень широка (рис. 1), и для его реализации совсем необязательно использовать мощные микропроцессоры или ПЛИС.
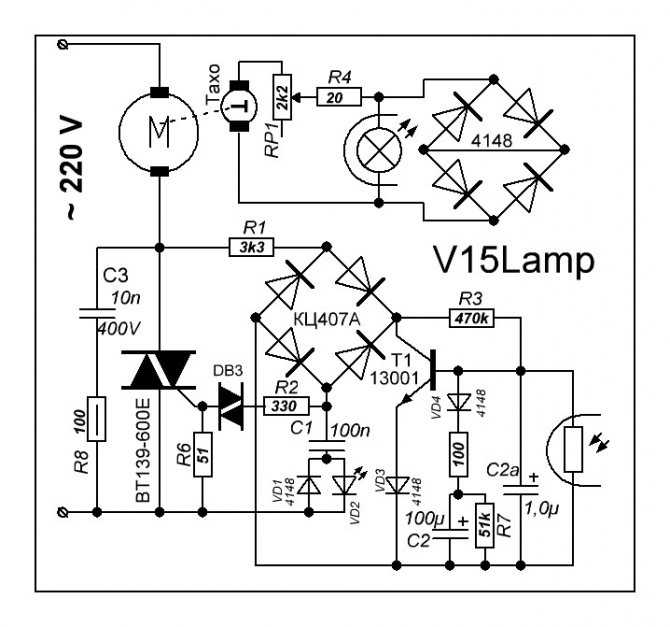
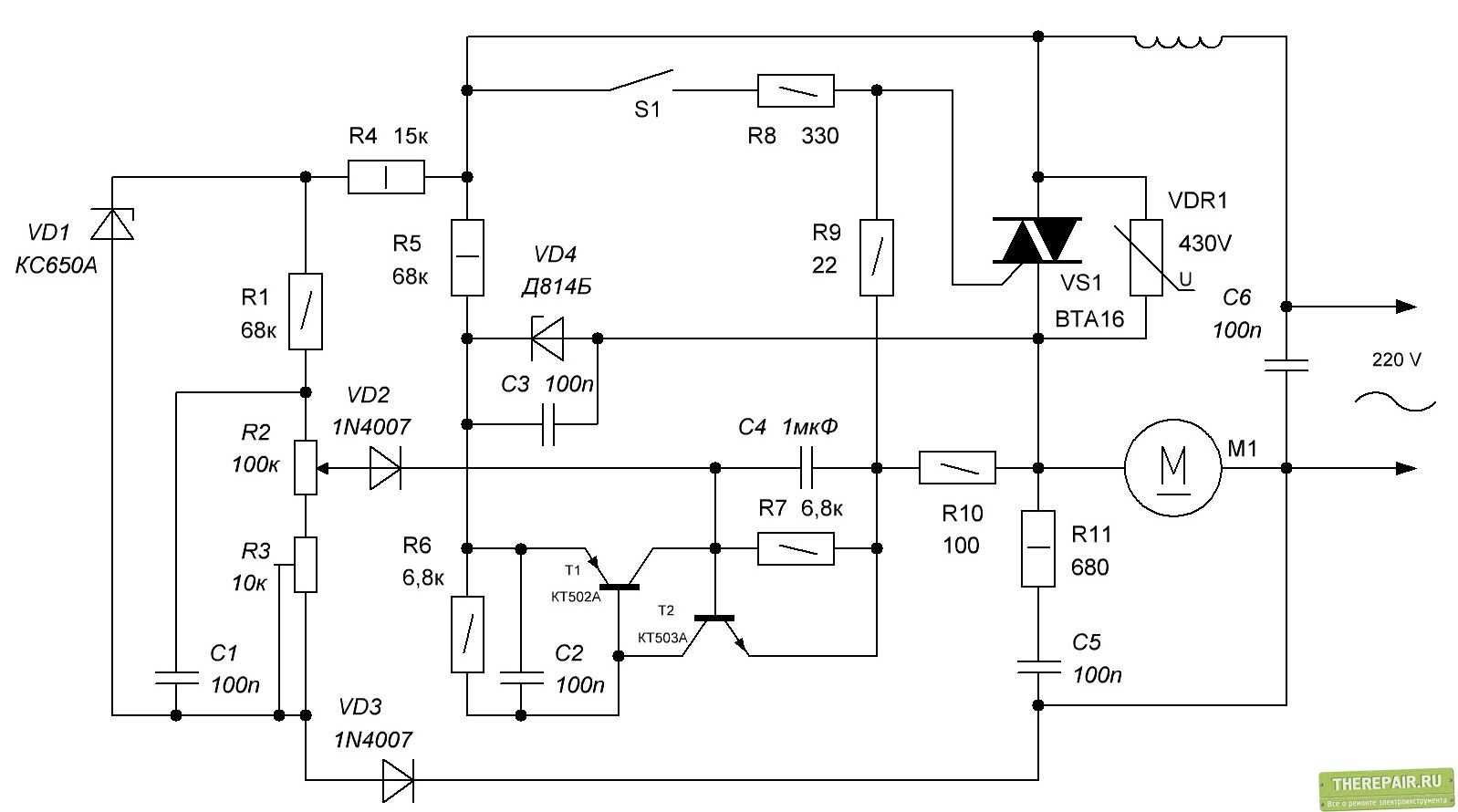

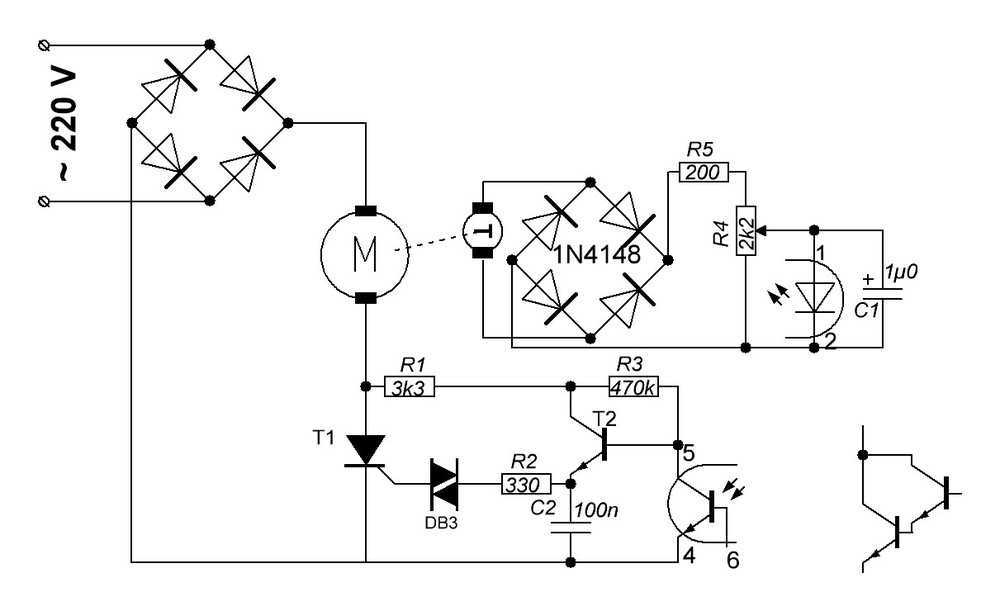
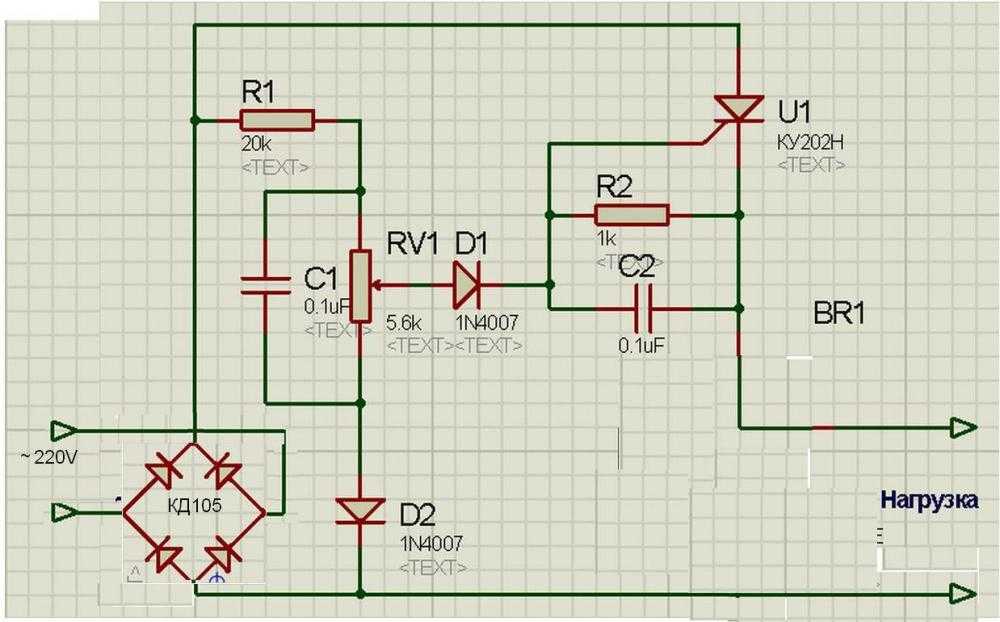

Рис. 1. Применение ИИ в современном мире
В последнее время ИИ развивается особенно быстро. Этому есть несколько причин:
- благодаря технологии IoT на интернет-серверах собраны довольно большие сегменты данных, что позволяет гораздо быстрее, чем раньше, обучать нейронные сети;
- в последние годы появились новые алгоритмы, благодаря которым нейронные сети могут работать эффективнее на таких периферийных устройствах, как 32-битные микроконтроллеры.
Применение ИИ дает разработчикам ряд преимуществ:
- Рост прибыли. Машинное обучение позволяет анализировать накапливаемые данные и находить в них закономерности. Эти закономерности ложатся в основу новых бизнес-моделей, с помощью которых можно увеличить прибыль.
- Возможность управления рисками. Если есть возможность отслеживать и анализировать поведение какой-либо машины, то можно прогнозировать ее аварийное состояние еще до того, как она будет ломаться. Таким образом, можно вовремя находить аномалии в любой работающей системе и выполнять превентивное техническое обслуживание.
- Снижение затрат. «Интернет вещей» дает возможность каждую секунду отправлять в «облачные» хранилища огромные объемы данных. Внедрение машинного обучения в периферийных устройствах (таких как микроконтроллеры) позволяет проверять и оценивать данные, прежде чем отправлять их в «облако». Это может снизить эксплуатационные расходы IoT-системы, ведь плата за облачные сервисы пропорциональна объему передаваемых данных.
Помимо развития самой технологии, появляется множество доступных средств разработки для дизайнеров и инженеров. Сейчас на рынке представлены программные и аппаратные средства, которые позволяют создавать устройства ИИ даже разработчикам, не имеющим никакого опыта в этой сфере.
В чем же заключаются преимущества и трудности реализации алгоритмов машинного обучения по сравнению с классическими алгоритмами на основе правил?
Большим преимуществом машинного обучения является ускоренное время разработки. С помощью машинного обучения можно обнаруживать закономерности в данных, даже не понимая этих данных и не ожидая что-то получить на выходе. Эта особенность выгодно отличает машинное обучение от классических алгоритмов, где нужно четко представлять, что вы хотите получить в итоге. Таким образом, машинное обучение позволяет находить совершенно новые возможности для решения задач и по-новому трактовать накопленные данные.
Трудности заключаются в том, что для реализации машинного обучения нужны специалисты, которые разбираются в науке о данных. Только они смогут разработать правильную модель ИИ и обучить ее, особенно если планируется распознавать какие-то изображения или видео. Специалисты будут маркировать данные и разрабатывать сценарии, которые нужно реализовать. Другими словами, для внедрения ИИ необходимы предварительная подготовка и инвестиции в специалистов, способных сделать нужную работу.
Кто будет создавать встраиваемые системы
Несмотря на огромное число выпускников ВУЗов по направлениям информатики и ВТ, в области создания ВсС ощущается серьезная нехватка квалифицированных специалистов, владеющих как технологиями низкоуровневого проектирования, так и методологией и опытом высокоуровневого, архитектурного проектирования.
В профессиональном плане это объясняется типовой моделью знаний выпускника вуза в области ВТ, которая предполагает:
- доминирование ВС с центральным программируемым процессором интерпретирующего типа;
- организацию прикладного вычислительного процесса в рамках ОС (комплекс системных программ) посредством создания программы на языке высокого уровня с последующей трансляцией в команды аппаратного процессора и вызовы функций ОС.
Такая модель профессиональных знаний пригодна в секторе прикладного программирования на стандартных аппаратно-программных платформах и неэффективна в области создания ВсС.
Эффективное решение перечисленных проблем целевой подготовки разработчиков ВсС и СнК («система на кристалле», System on Chip, SoC) предложено в ряде ведущих университетов США и Европы. Остановимся на одном из наиболее интересных подходов. В Калифорнийском университете (Беркли) программа подготовки по ВсС и СнК уже около десяти лет основывается на методологии Platform Based Design (платформно-ориентированное проектирование, PBD) и включает следующие разделы: методология PBD, модели вычислений, проектирование архитектуры и встроенное ПО.
Дополнением и развитием этой методологии обучения выступает подход к проектированию ВсС в рамках понятия CPS, о котором говорилось выше. Акцент делается на критических размышлениях о технологиях проектирования ВсС и на том, как проектирование встроенного ПО влияет на поведение, безопасность и надежность CPS. Курс дает студентам опыт проектирования встроенного ПО на трех уровнях, а именно: программирование на уровне «голого железа» (ПО, которое выполняется при отсутствии ОС); программирование в пределах ОСРВ; высокоуровневое проектирование в технологии Model Driven Design (MDD, «модельно-ориентированное проектирование»). В каждом случае студентов учат глубоко исследовать механизмы и абстракции, которые им предоставлены, и понимать последствия выбора абстракций для проектирования всей системы.
На сходных идеях строится обучение на кафедре вычислительной техники Санкт-Петербургского национального исследовательского университета информационных технологий, механики и оптики (НИУ ИТМО) в рамках направления «Встраиваемые вычислительные системы», включающее три магистерские специализации :
- «Проектирование встраиваемых вычислительных систем» — организация ВсС с различной архитектурой; технологии и инструменты высокоуровневого проектирования, встроенное ПО, схемотехническое проектирование.
- «Системотехника интегральных вычислителей. Системы на кристалле» — создание вычислительных компонентов и ВсС в интегральном исполнении, технологии высокоуровневого проектирования SoC, тестопригодное проектирование, энергосберегающие технологии, средства моделирования и верификации SoC.
- «Сетевые встраиваемые системы». Акцент сделан на проектировании распределенных ВсС, интерфейсах и протоколах взаимодействия. Магистранты изучают вопросы организации сетей Fieldbus, сенсорных беспроводных сетей, сетей на кристалле (NoC).
Климат контроль на базе «Тион Про»
Проблема кондиционирования и вентиляции производственных площадей или большого торгового центра часто решается с помощью VRF-систем. Такая система позволяет оптимизировать мощности оборудования для кондиционирования и вентиляции, перераспределяя потоки хладагента и воздуха для вентиляции между обслуживаемыми помещениями. Еще одно из преимуществ данной системы — возможность модульной поэтапной установки и запуска. Для управления подобным устройством необходим микропроцессорный модуль с достаточно широкими возможностями. Множество датчиков температуры, влажности, задымленности требуют постоянного контроля состояния, а внешние и внутренние блоки вентиляции, терморегуляции, увлажнения или осушения воздуха предполагают наличие многоканальной системы централизованного управления. При эксплуатации подобной системы наиболее удобной оказывается единая центральная панель, с помощью которой можно было бы контролировать климатические показатели помещений и осуществлять при необходимости корректирующее вмешательство в работу автоматики. Роль такой панели с успехом может выполнять одноплатная микропроцессорная система «Тион-Про». Для передачи данных возможно использовать как системную шину с функцией прямого доступа к памяти, так и интерфейсы RS-232, RS-485 и USB 2.0 (с технологией Plug&Play).
Наличие интерфейса Ethernet открывает возможность удаленного управления всем комплексом климатического контроля с использованием любых программных технологий удаленного доступа. При создании такой системы управляющий сервер можно организовать на базе «Тион-Про», избавившись от необходимости использования дополнительного HTTP-сервера. Необходимо лишь устроить защищенный доступ и разработать управляющую веб-страницу.
Особо привлекательной для конечного пользователя такой климат-системы окажется компактная переносная реализация контрольно-управляющего модуля. В ней уместно применение сенсорного экрана и жидкокристаллического дисплея, ставших традиционными для подобных устройств, и для реализации этого разработчики встроили в «Тион-Про» разъемы для подключения резистивного сенсорного экрана иЖК-панели с разрешением QVGA. Встроенная система адаптивного энергопотребления позволит увеличить срок работы устройства от аккумуляторов. Индивидуальные для каждого помещения настройки могут храниться в энергонезависимой флэш-памяти объемом 64 Мбайт либо на внешней флэш-карте, подключаемой через предусмотренный интерфейс.
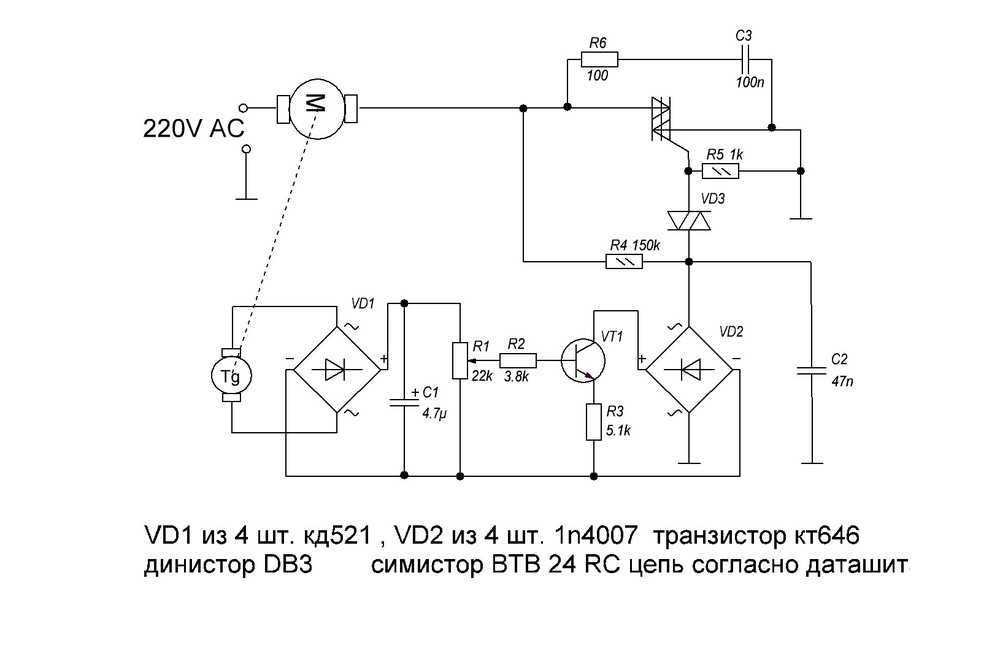
Регулятор оборотов электродвигателя 220в. Схема и описание
Данный регулятор оборотов электродвигателя 220в позволяет изменять частоту оборотов вращения вентилятора либо электродвигателя, рассчитанных на работу от сети 220 вольт.
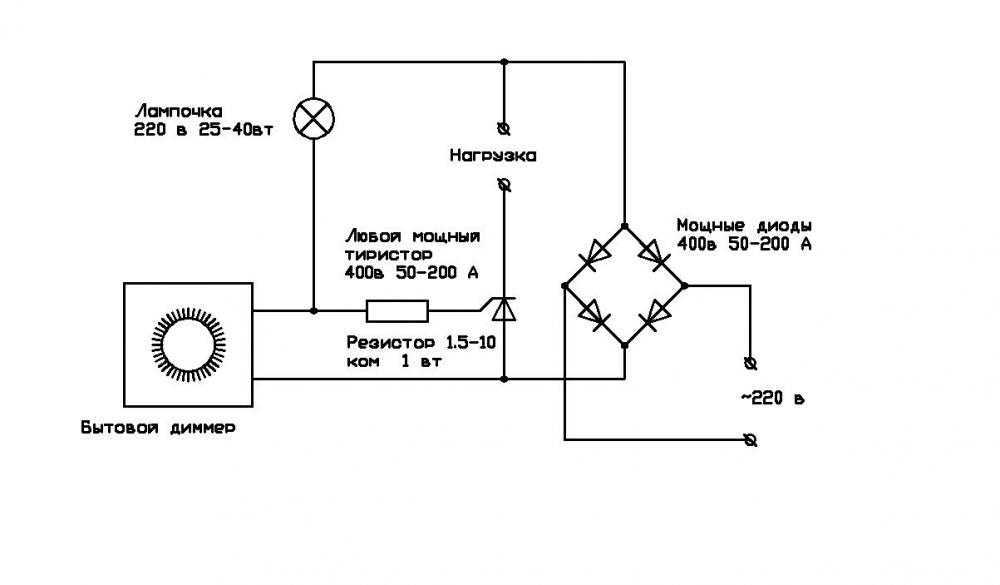
Достаточно популярным регулятором оборотов для электродвигателей на 220 вольт переменного тока является схема на тиристорах. Типовой схемой является подключение электродвигателя или вентилятора в разрыв анодной цепи тиристора.
Одно не маловажное условие при использовании подобных регуляторов, это надежный контакт во всей цепи. Что нельзя сказать про коллекторные электродвигатели, поскольку у них механизм щеток создает кратковременные обрывы электроцепи
Это существенно влияет на качество работы регулятора
Это существенно влияет на качество работы регулятора.
Описание работы схемы регулятора оборотов
Приведенная ниже схема тиристорного регулятора оборотов, как раз разработана для изменения частоты вращения коллекторных электродвигателей (электродрель, фрезер, вентилятор). Первое, что следует отметить, это то, что двигатель вместе с силовым тиристором VS2 подсоединен в одну из диагоналей диодного моста VD3, на другую же подается сетевое напряжение 220 вольт.
Помимо этого, данный тиристор контролируется достаточно широкими импульсами, благодаря которым, непродолжительные отключения активной нагрузки, которыми характеризуется работа коллекторного двигателя, не влияют на устойчивую работу данной схемы.

Для управления тиристором VS1 на транзисторе VT1, собран генератор импульсов. Питание данного генератор осуществляется трапециевидным напряжением, создающимся в результате ограничения положительных полуволн стабилитроном VD1 имеющих частоту 100 Гц. Конденсатор С1 разряжается через сопротивления R1, R2, R3. Резистором R1 осуществляется скорость разряда данного конденсатора.
При достижении на конденсаторе напряжения достаточного для открывания транзистора VT1, на управляющий вывод VS1 поступает положительный импульс. Тиристор открывается и теперь уже на управляющем выводе VS2 появляется длительный импульс управления. И уже с данного тиристора напряжение, которое фактически и влияет на величину оборотов, подается на двигатель.
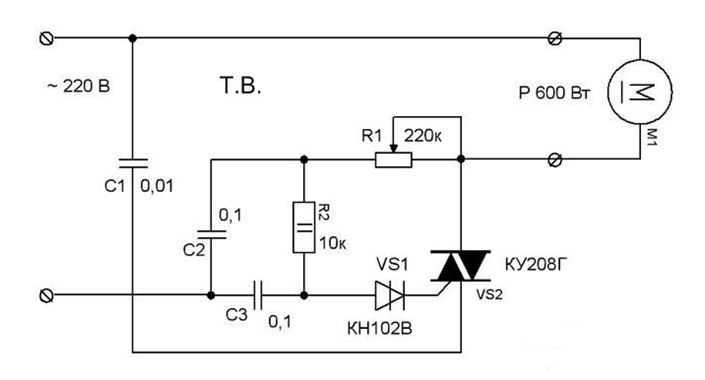

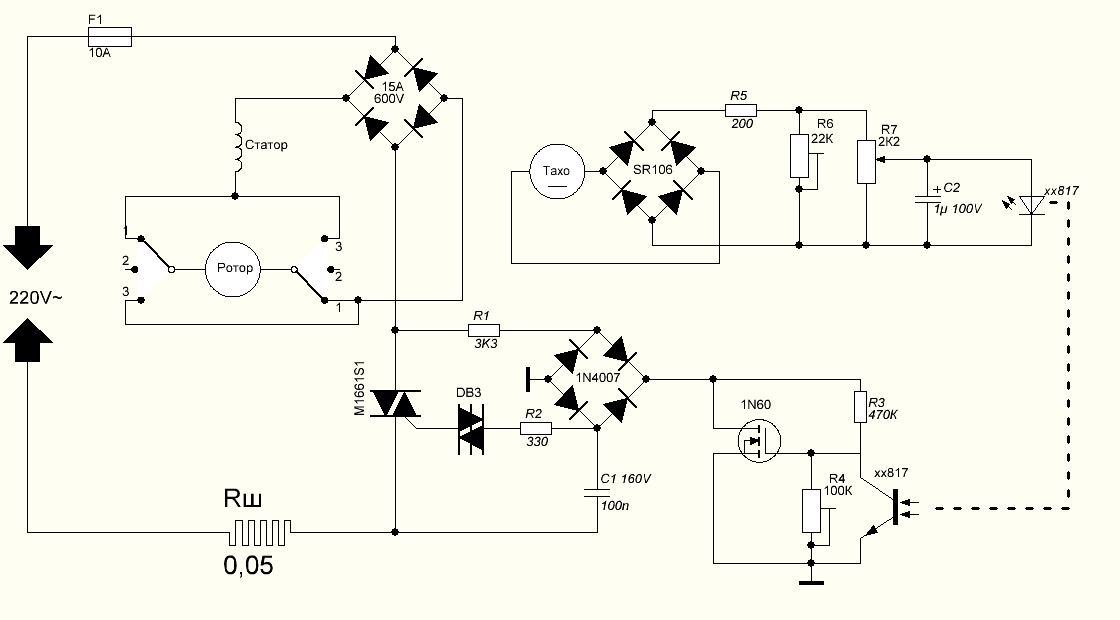
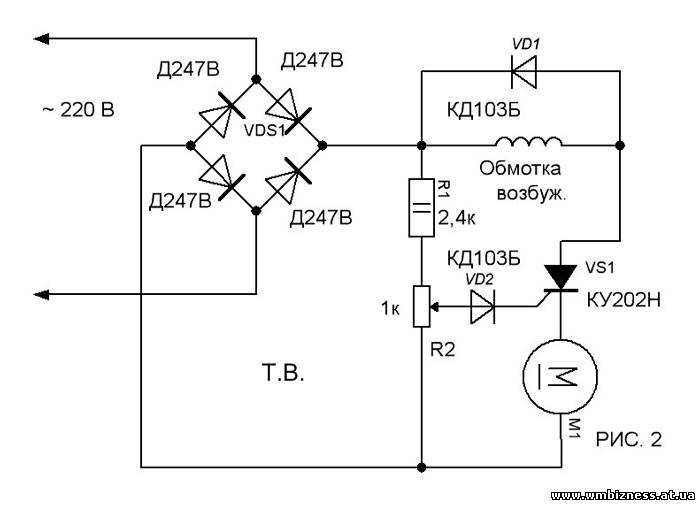

Частоту оборотов вращения электродвигателя регулируют резистором R1. Так как в цепь VS2 подключена индуктивная нагрузка, то возможно спонтанное отпирание тиристора, даже при отсутствии управляющего сигнала. Поэтому для предотвращения данного нежелательного эффекта, в схему добавлен диод VD2 который подключается параллельно обмотке возбуждения L1 электродвигателя.
Детали регулятора оборотов вентилятора и электродвигателя
Стабилитрон – можно заменить на другой с напряжением стабилизации в районе 27 – 36В. Тиристоры VS1 – любой маломощный с прямым напряжением более 100 вольт, VS2 — возможно поставить КУ201К, КУ201Л, КУ202М. Диод VD2 – с обратным напряжением не меньше 400 вольт и прямым током более 0,3А. Конденсатор C1 – КМ-6.
Настройка регулятора оборотов
Во время наладки схемы регулятора желательно применить стробоскоп, который позволяет измерить частоту вращения электродвигателя либо стрелочный вольтметр для переменного тока, который подсоединяют параллельно двигателю.
Вращая ручку резистора R1, определяют диапазон изменения напряжения. Путем подбора сопротивления R3 устанавливают данный диапазон в районе от 90 до 220 вольт. В том случае если при минимальных оборотах двигатель вентилятора работает неустойчиво, то необходимо немного уменьшить сопротивление R2.
Система прикроватного мониторинга
Системы прикроватного мониторинга используются, как правило, в палатах интенсивной терапии и реанимационных отделениях больниц. Это обусловлено прежде всего достаточно высокой стоимостью устройств. Поэтому разработка дешевой и функциональной системы мониторинга позволит расширить область применения и занять внушительную рыночную нишу в области медицинского оборудования.
Система на основе «Тион-270» позволяет совместить невысокую стоимость с высокой функциональностью. Требования к надежности любого медицинского устройства предъявляются достаточно жесткие. Сбой в работе может обернуться человеческими жертвами
Поэтому особенно важно для разработчика уделить внимание конструкции, минимизировав число межблочных соединений, которые всегда являются самым ненадежным местом любой электронной системы. Именно это и обеспечивается одноплатной конструкцией микроконтроллера, который реализуют готовую систему обработки и хранения информации, выполненную топологически в пределах одной печатной платы. Еще одним преимуществом является простота ремонта — при возникновении неисправности достаточно заменить одноплатный модуль аналогичным и быстро восстановить работоспособность прибора
Еще одним преимуществом является простота ремонта — при возникновении неисправности достаточно заменить одноплатный модуль аналогичным и быстро восстановить работоспособность прибора.
Кроме того, такая система позволит сохранять работоспособность в условиях перебоев электроэнергии. Становится возможным использование прикроватного монитора с собственным источником бесперебойного питания на базе встроенной в прибор аккумуляторной батареи. Это также позволит применять монитор в нестационарных условиях, например в машинах скорой помощи.
Современный прикроватный монитор не только подает тревожный сигнал при нарушении какой-либо из жизненных функций пациента, но и ведет постоянный сбор и обработку информации о его состоянии — осуществляет построение графиков и линий трендов для измеряемых параметров в режиме реального времени, при этом сбор информации ведется одновременно по 10–20 аналоговым каналам ввода. Это датчики неинвазивного или инвазивного систолического и диастолического давления, не менее двух каналов термодатчиков, датчик пульса, электроды контроля дыхания, а также содержания кислорода в крови, до семи электродов кардиомониторинга. И если для датчиков долгопериодных процессов типа дыхания или давления достаточно низких частот выборки, то для достижения высокого разрешения при кардиомониторинге требуются более высокие частоты. Для обработки такого потока процессор должен обладать достаточным быстродействием и высокой, не менее 32 бит, разрядностью. «Тион-270» имеет 32-разрядную шину данных, кроме того, максимальная частота процессора составляет 520 МГц.
Для обработки и сохранения большого объема информации, собираемого датчиками монитора, удобнло применение унифицированного накопителя информации, такого как флэш-карта. Кроме того, для крупных медицинских центров окажется полезным использование интерфейса передачи данных с помощью беспроводных технологий. В любом из перечисленных случаев реализация монитора на базе одноплатной системы «Тион-270», в состав которой входят готовые разъемы для подключения флэш-носителя и радиомодема, позволяет существенно сэкономить средства на разработке.
Для удобного предоставления информации может быть применен цветной LCD-дисплей, для подключения которого «Тион-270» имеет необходимый интерфейс.