

Введение
Сетевой источник питания — один из самых ответственных узлов в структуре электронной аппаратуры. Наиболее важные параметры сетевого преобразователя: рабочий диапазон входного напряжения, потребляемая мощность в дежурном режиме, габаритные размеры, надежность, электромагнитная совместимость и себестоимость. Подавляющее большинство современной аппаратуры с питанием от сети использует импульсные источники питания. Сетевой импульсный источник питания обеспечивает гальваническую развязку выходных цепей от сетевого напряжения. Развязка обеспечивается за счет использования импульсного трансформатора в силовой цепи и оптрона в цепи обратной связи. Ключевым элементом импульсного сетевого источника питания является микросхема ШИМ-контроллера. Основная функция ШИМ-контроллера — управление силовым транзистором (транзисторами), стоящим в первичной цепи импульсного трансформатора, и поддержание выходного напряжения на заданном уровне, используя сигнал обратной связи. Структура современных ШИМ-контроллеров обеспечивает и дополнительные функции, повышающие эффективность и надежность источника питания:
ограничение тока и скважности импульсов в цепи управления силовыми транзисторами;
плавный запуск преобразователя после подачи питания (Soft Start);
встроенный динамический источник питания от высоковольтного входного напряжения;
контроль уровня входного напряжения с устранением «провалов» и «выбросов»;
защита от КЗ в цепи силового трансформатора и выходных цепей выходного выпрямителя;
температурная защита контроллера, а также ключевого элемента;
блокировка работы преобразователя при пониженном и повышенном входном напряжении;
оптимизация управления для дежурного режима и режима с пониженным током в нагрузке (пропуск циклов или переход на пониженную частоту преобразования);
оптимизация уровня ЭМИ.
Рассматриваемые в статье ШИМ-контроллеры не имеют встроенного силового транзистора, управляющего током в первичной цепи силового трансформатора.
Системы управления микросхемами
Важно знать не только из чего состоят микросхемы шим — контроллеров, но и какие существуют виды самих систем. В настоящее время доступно две основных системы широко — импульсной модуляции в которых шим — контроль принимает активное участие
Вот их некоторые особенности:
Цифровая система. В цифровой шим — системе все существующие процессы описываются цифровыми данными. Так на выходе в цифровом формате формируется показатель уровня напряжения. Заметим, что уровень напряжения может быть высокий (измеряется как 100%) и низкий (0%). Однако показатели напряжения, благодаря современным технологиям, можно изменять
Как? Необходимо изменить скважность импульсов. Только тогда изменится и напряжение
Любые совершенные перемены имеют свою частоту. Именно шим — контролёры регулируют описанные процессы. С их помощью вся система будет успешно работать. Эта специальная микросхема по праву называется сердцем всей цифровой системы шим — модуляторов.
А вот получить на выходе нужный сигнал можно как с программным, так и аппаратным методом.
Аппаратный метод. Получение сигнала этим способом происходит с помощью специального таймера, который изначально встроен в цифровую систему. Такой таймер генерирует или способствует включению импульсов на определённых этапах вывода сигнала.
Программный метод. В этом случае получения сигналов происходит посредством выполнения специальных программных команд. У программного способа больше возможностей, нежели у аппаратного. В то же время использования этого метода получения сигналов может занять много памяти.
А что можно сказать о «сердце системы». У шима — контролёра, который активно применяется в цифровых модуляторах есть свои преимущества. Стоит помнить о следующих:
- Низкая стоимость.
- Стабильная работа.
- Высокая надёжность.
- Возможность экономить энергию.
- высокая эффективность преобразования сигналов.
 Все перечисленные преимущества делают цифровую систему более востребованной среди потребителей.
Все перечисленные преимущества делают цифровую систему более востребованной среди потребителей.
Аналоговый модулятор. Принцип работы аналогового модулятора в корне отличается от принципа работы цифрового Вся суть работы такого модулятора состоит в сравнении двух сигналов. Эти сигналы отличаются между собой порядком частоты. Операционный усилитель — это главный элемент аналогового модулятора, который отвечает за сравнение сигналов. Сравнение сигналов осуществляется на выходе. В качестве сравнения усилитель используется два сигнала. Первый — пилообразное напряжение высокой частоты. Второй сигнал — низкочастотное напряжение. После сравнения на свет появляются импульсы прямоугольной формы. Длительность импульсов напрямую зависят от модулирующего сигнала.
Шим — контроллер в импульсных блоках питания
Многие электрические приборы сегодня оснащены специальными блоками питания. Эти блоки помогают преобразить один вид напряжения в другой. В процессе преобразования энергии принимают участия два устройства:
- Импульсный блок питания.
- аналоговые трансформаторные устройства.
В этой статье мы больше внимания обратим на первое устройство, так как именно в нём используется шим — контролёр.
ШИМ на практике
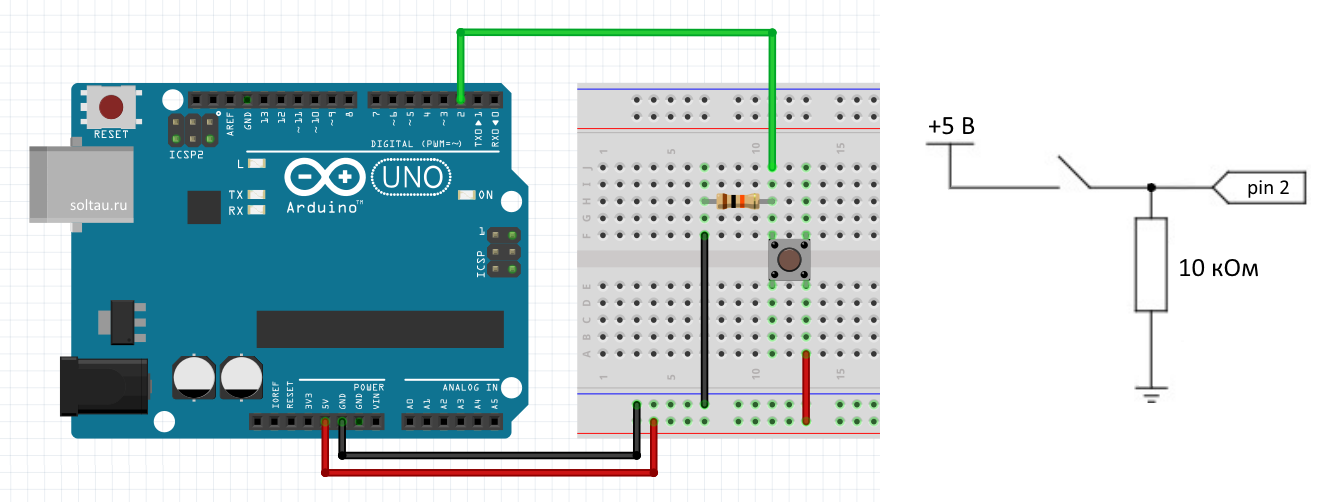
В этой статье, для работы сигнала ШИМ, мы использовали кнопку, нажимаемую вручную. Конечно, если мы построим схему, требующую такого контроля, никто не будет стоять и все время щелкать переключателями. Сигналы ШИМ чаще всего генерируются с помощью цифровых схем.
В следующих статьях мы будем использовать для этой цели очень популярный чип NE555. Если вы решили получше изучить этот вопрос (а оно того действительно стоит!), приступайте к программированию, например, на Arduino. Микроконтроллер будет выполнять функцию генератора, и вы сможете программно установить все параметры ШИМ.
Видео о работе импульсного источника питания
·о ·р
Широтно-импульсная модуляция
(ШИМ, англ.Pulse-width modulation (PWM) ) — приближение желаемого сигнала (многоуровневого или непрерывного) к действительным бинарным сигналам (с двумя уровнями —вкл /выкл ), так, что, в среднем, за некоторый отрезок времени, их значения равны. Формально, это можно записать так: , где x
(t ) — желаемый входной сигнал в пределе отt1 доt2 , а ∆Ti — продолжительностьi -го ШИМ импульса, каждого с амплитудойA . ∆Ti подбирается таким образом, что суммарные площади (энергии) обеих величин приблизительно равны за достаточно продолжительный промежуток времени, равны так же и средние значения величин за период: . Управляемыми «уровнями», как правило, являются параметры питания силовой установки, например, напряжение импульсных преобразователей /регуляторов постоянного напряжения/или скорость электродвигателя. Для импульсных источников x
(t ) =Uconst стабилизации.
ШИП
— широтно-импульсный преобразователь, генерирующий ШИМ-сигнал по заданному значению управляющего напряжения. Основное достоинство ШИМ — высокий КПД его усилителей мощности, который достигается за счёт использования их исключительно в ключевом режиме. Это значительно уменьшает выделение мощности на силовом преобразователе (СП).
Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
Принцип ШИМ – широтно-импульсная модуляция заключается в изменении ширины импульса при постоянстве частоты следования импульса. Амплитуда импульсов при этом неизменна.
Широтно-импульсное регулирование находит применение там, где требуется регулировать подаваемую к нагрузке мощность. Например, в схемах управления электродвигателями постоянного тока, в импульсных преобразователях, для регулирования яркости светодиодных светильников, экранов ЖК-мониторов, дисплеев в смартфонах и планшетах и т.п.
Большинство вторичных источников питания электронных устройств в настоящее время строятся на основе импульсных преобразователей, применяется широтно-импульсная модуляция и в усилителях низкой (звуковой) частоты класса D, сварочных аппаратах, устройствах зарядки автомобильных аккумуляторов, инверторах и пр. ШИМ позволяет повысить коэффициент полезного действия (КПД) вторичных источников питания в сравнении с низким КПД аналоговых устройств.
Широтно-импульсная модуляция бывает аналоговой и цифровой.
Аналоговая широтно-импульсная модуляция
Как уже упоминалось выше, частота сигнала и его амплитуда при ШИМ всегда постоянны. Один из важнейших параметров сигнала ШИМ – это коэффициент заполнения, равный отношению длительности импульса t к периоду импульса T. D = t/T. Так, если имеем сигнал ШИМ с длительностью импульса 300 мкс и периодом импульса 1000 мкс, коэффициент заполнения составит 300/1000 = 0,3. Коэффициент заполнения также выражается в процентах, для чего коэффициент заполнения умножается на 100%. По примеру выше процентный коэффициент заполнения составляет 0,3 х 100% = 30%.



Скважность импульса – это отношение периода импульсов к их длительности, т.е. величина, обратная коэффициенту заполнения. S = T/t
S = T/t.
Частота сигнала определяется как величина, обратная периоду импульса, и представляет собой количество полных импульсов за 1 секунду. Для примера выше при периоде 1000 мкс = 0,001 с, частота составляет F = 1/0,001 – 1000 (Гц).
Сигнал ШИМ формируется микроконтроллером или аналоговой схемой. Этот сигнал обычно управляет мощной нагрузкой, подключаемой к источнику питания через ключевую схему на биполярном или полевом транзисторе. В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
В переходных состояниях на ключе присутствует значительное напряжение с прохождением значительного тока, т.е. значительна и рассеиваемая тепловая мощность. Поэтому в качестве ключа необходимо применение малоинерционных полупроводниковых приборов с быстрым временем переключения, порядка десятков наносекунд.
Если ключевая схема управляет светодиодом, то при малой частоте сигнала светодиод будет мигать в такт с изменением напряжения сигнала ШИМ. При частоте сигнала выше 50 Гц мигания сливаются вследствие инерции человеческого зрения. Общая яркость свечения светодиода начинает зависеть от коэффициента заполнения – чем ниже коэффициент заполнения, тем слабее светится светодиод.
При управлении посредством ШИМ скорости вращения двигателя постоянного тока частота ШИМ должна быть очень высокой, и лежать за пределами слышимых звуковых частот, т.е. превышать 15-20 кГц, в противном случае двигатель будет «звучать», издавая раздражающий слух писк с частотой ШИМ. От частоты зависит и стабильность работы двигателя. Низкочастотный сигнал ШИМ с невысоким коэффициентом заполнения приведет к нестабильной работе двигателя и даже возможной его остановке.
Тем самым, при управлении двигателем желательно повышать частоту сигнала ШИМ, но и здесь существует предел, определяемый инерционными свойствами полупроводникового ключа. Если ключ будет переключаться с запаздываниями, схема управления начнет работать с ошибками. Чтобы избежать потерь энергии и добиться высокого коэффициента полезного действия импульсного преобразователя, полупроводниковый ключ должен обладать высоким быстродействием и низким сопротивлением проводимости.
Программирование ШИМ сигнала в микроконтроллере ATmega16 на языке С (Си)
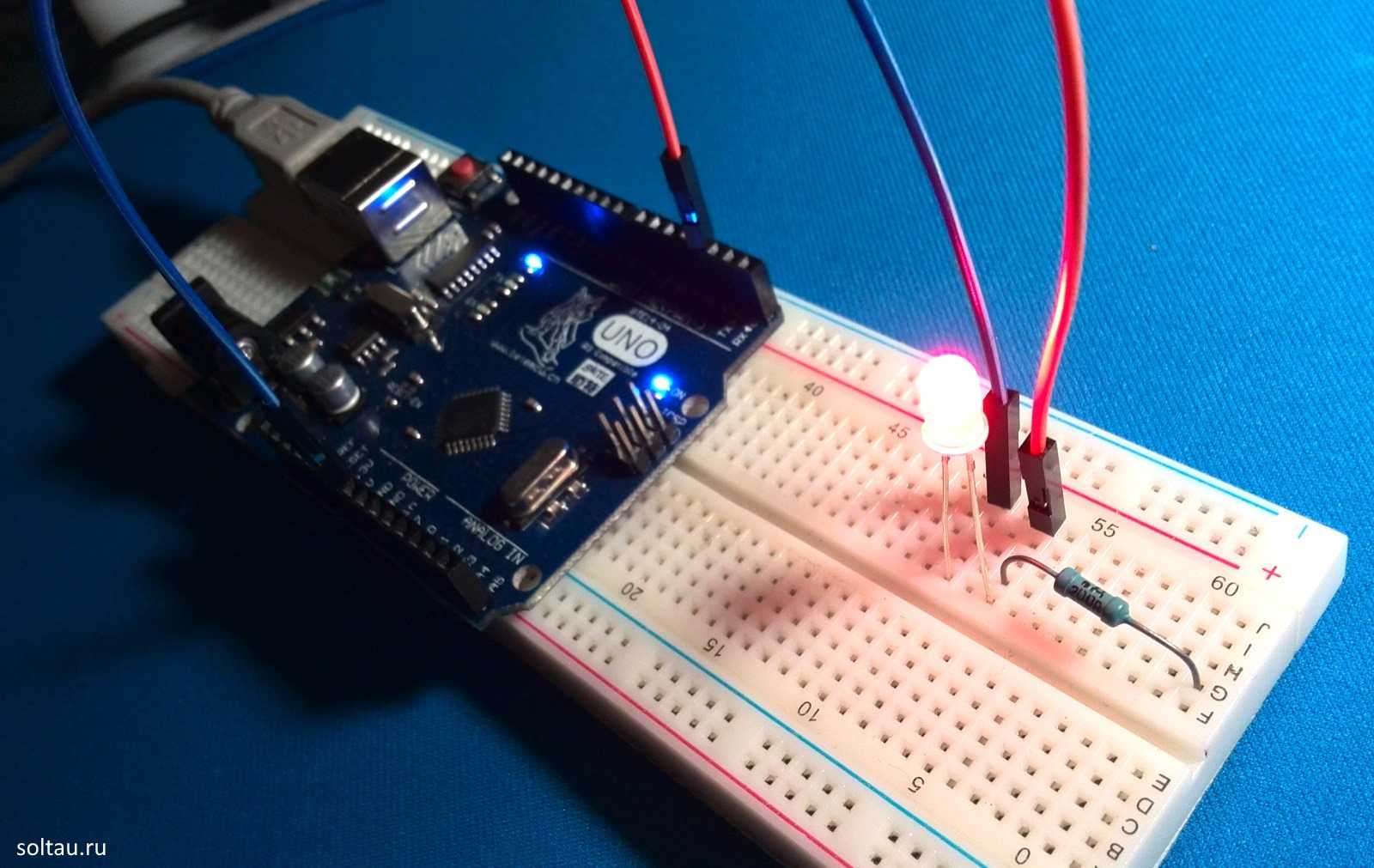
Полный текст программы приведен ниже, а в этом разделе поясним ключевые особенности программы. Видео, демонстрирующее работу схемы, приведено в конце статьи. На видео вы можете видеть как яркость свечения светодиода будет изменяться постепенно в зависимости от изменения коэффициента заполнения ШИМ.
Начать программирование ШИМ ATmega16 необходимо с установки нужного значения регистра Таймера 2 – его биты приведены на следующем рисунке. Изменяя данные биты, мы можем настраивать нужные нам параметры ШИМ.

В регистре Таймера 2 три группы битов:
- FOC2 (Force Output Compare for Timer2) – устанавливается когда WGM биты определяют не режим ШИМ.
- WGM2(Wave Generation Mode for Timer2 – режим генерации волны) – эти биты контролируют последовательность счета, максимальное значение счета (TOP counter value) и какой тип формы сигналов будет использован.
- COM2 (Compare Output Mode for Timer2 – режим сравнения для Таймера 2) – можно выбрать режим с инвертированием и без инвертирования.
Установим биты WGM20 и WGM21 чтобы активировать режим быстрой ШИМ.
C++
TCCR2 |= (1<<WGM20)|(1<<WGM21);
| 1 | TCCR2|=(1<<WGM20)|(1<<WGM21); |

Для полной информации относительно возможных режимов ШИМ, устанавливаемых битами WGM20 и WGM21, посмотрите официальный даташит на ATmega16.
Поскольку мы не будем использовать предделитель, запишем в необходимые биты ‘001’:
C++
TCCR2 |=(1<<COM21)|(1<<CS20)|(0<<CS21)|(0<<CS22);
| 1 | TCCR2|=(1<<COM21)|(1<<CS20)|(<<CS21)|(<<CS22); |

Настройки режима сравнения (Compare Output Mode) для режима быстрой ШИМ приведены в следующей таблице.
| COM21 | COM20 | Описание |
| Normal port operation, OC2 disconnected | ||
| 1 | Зарезервировано | |
| 1 | Clear OC2 on Compare match, Set OC2 at TOP | |
| 1 | 1 | Set OC2 on compare match, clear OC2 at TOP |
Увеличиваем коэффициент заполнения ШИМ от 0 до 100% — таким образом яркость свечения светодиода будет изменяться с течением времени. Будем использовать значения в диапазоне 0-255, которые будем передавать в OCR2 – это как раз тот байт, который отвечает за установку того самого значения, которое задает различные продолжительности включения (отношение длительности импульса к периоду повторения) импульсов ШИМ.
C++
for(duty=0; duty<255; duty++) // 0 to max duty cycle
{
OCR2=duty; //медленно увеличиваем яркость свечения светодиода
_delay_ms(10);
}
|
1 |
for(duty=;duty<255;duty++)// 0 to max duty cycle { OCR2=duty;//медленно увеличиваем яркость свечения светодиода _delay_ms(10); } |
Аналогичным образом уменьшаем коэффициент заполнения со 100% до 0% чтобы постепенно уменьшать яркость свечения светодиода.
C++
for(duty=0; duty>255; duty—) // max to 0 duty cycle
{
OCR2=duty; // медленно уменьшаем яркость свечения светодиода
_delay_ms(10);
}
|
1 |
for(duty=;duty>255;duty—)// max to 0 duty cycle { OCR2=duty;// медленно уменьшаем яркость свечения светодиода _delay_ms(10); } |
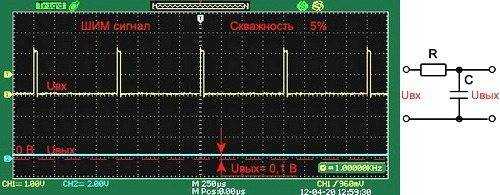
Зачем нужен был конденсатор?
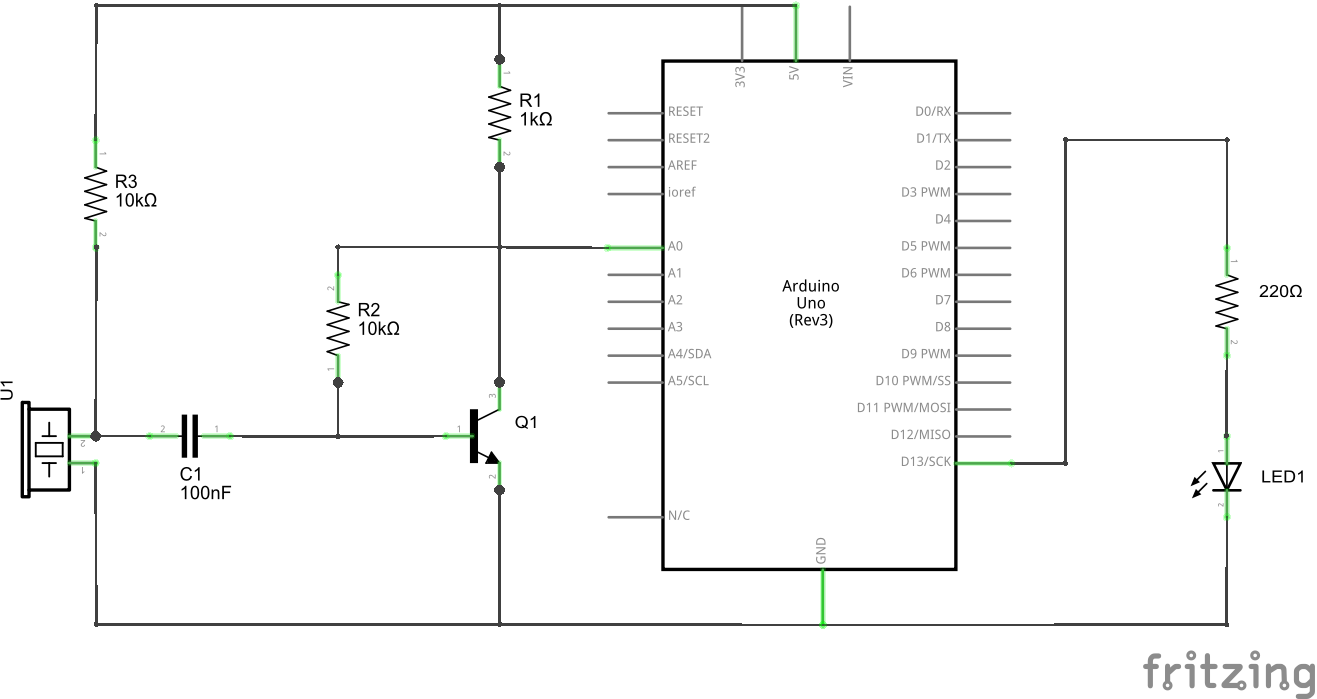
Вернемся еще раз к нашему примеру с конденсатором — чем может быть полезна такая схема? Как мы знаем, для управления диодом конденсатор не нужен, наш глаз усредняет эффект свечения диода. Именно конденсатор можно использовать на практике для усреднения напряжения. Правильно подобрав номинал конденсатора (и резисторов), на его выводах мы получили бы напряжение (почти) постоянное, плавно регулируемое в диапазоне 0–6 В в зависимости от заполнения ШИМ-сигнала.
В случае микропроцессора, такая схема очень популярна для получения плавно регулируемого выходного напряжения. В то время как сам процессор может обеспечивать напряжение только 0 В и, скажем, 5 В, управляя с помощью ШИМ и подключая резистор и конденсатор, мы можем получить любое напряжение в диапазоне 0-5 В на выходе схемы.
| Комбинация резистора и конденсатора создает простой фильтр. Именно благодаря ему, вместо скачков напряжения мы можем наблюдать его среднее значение. |
Вы можете легко проверить это самостоятельно, подключив мультиметр к выводам конденсатора емкостью 1000 мкФ. Быстро нажмите кнопку и посмотрите, что покажет мультиметр. Вместо 6 В, которые мы используем для питания нашей системы, мы будем видеть, например, 1,7 В. На конденсаторе значение этого напряжения будет меняться по мере «заполнения» сигнала, управляющего схемой — в данном случае это означает, что чем дольше нажата кнопка (время, когда она не нажата), тем выше будет напряжение на конденсаторе.
Но вы не можете использовать такую простую схему для прямого питания цепи, потребляющей значительный ток. Чтобы такая схема заработала, необходимо усилить ток, например, с помощью транзистора или операционного усилителя.
Принципы работы широтно-импульсной модуляции (ШИМ)
Рассмотрим схему, изображенную на следующем рисунке
Как мы выясним, управляя скважностью модуляции ШИМ (PWM) можно регулировать силу свечения светодиода

Если на представленном рисунке выключатель будет замкнут на протяжении некоторого времени, то на протяжении этого же времени лампочка будет гореть. Если переключатель будет замкнут в течение 8ms и будет разомкнут 2ms в течение интервала 10ms, тогда лампочка будет гореть только в течение интервала 8ms. В рассмотренном примере можно сказать, что среднее выходное напряжение (на лампочке) будет составлять 80% от напряжения батареи.



В другом случае выключатель замыкается на 5ms и размыкается на эти же самые 5ms в течение интервала 10ms, таким образом среднее напряжение на лампочке будет составлять 50% от напряжения батареи. Принято говорить, что если напряжение батареи 5В и цикл занятости составляет 50%, то среднее напряжение на оконечном устройстве (лампочке) будет составлять 2.5В.
В третьем рассмотренном на рисунке случае цикл занятости (duty cycle) составляет 20% и поэтому среднее напряжение на оконечном устройстве (лампочке) будет составлять 20% от напряжения батареи.
Более красочно принципы работы ШИМ показаны на следующих рисунках.
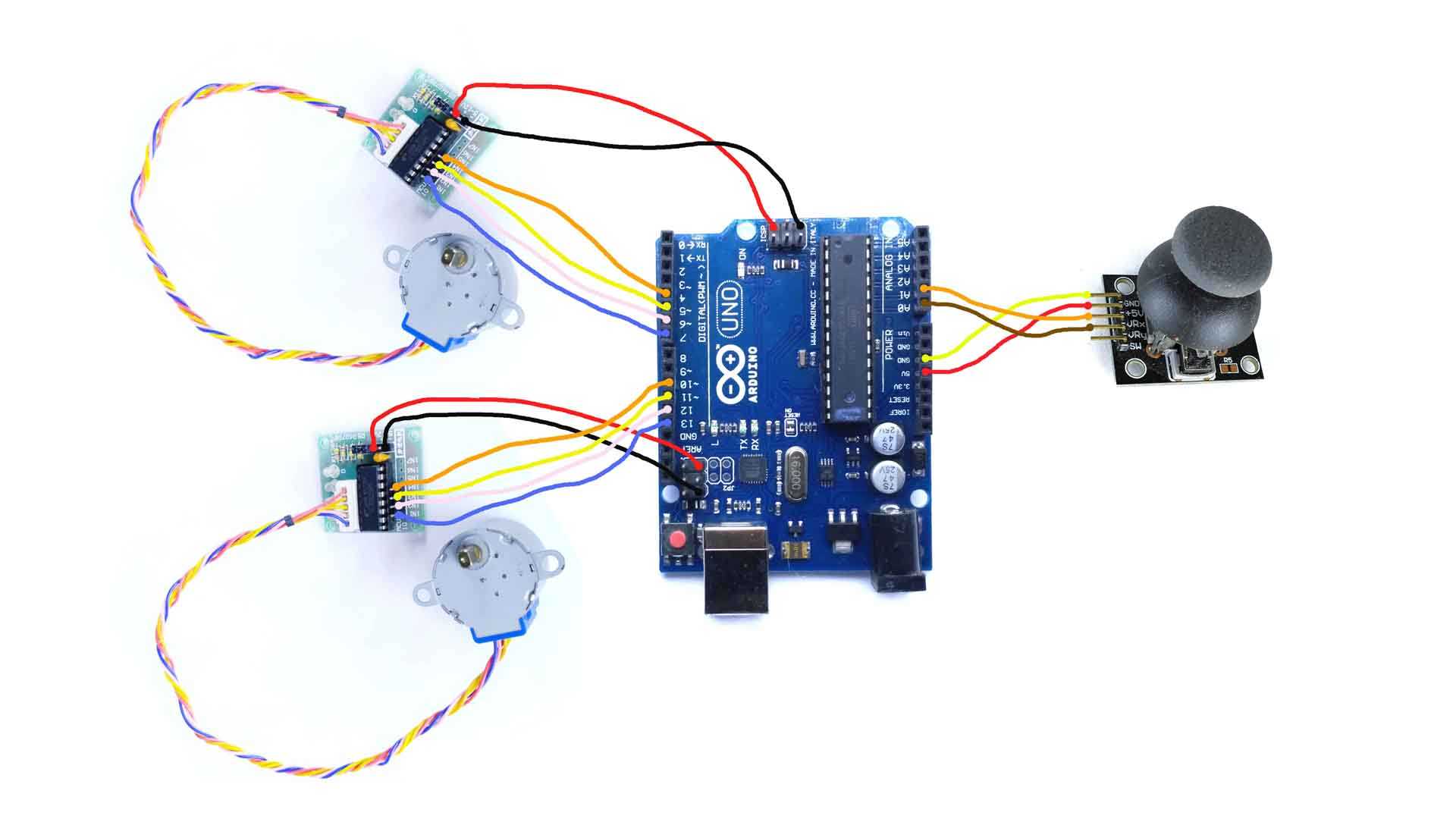
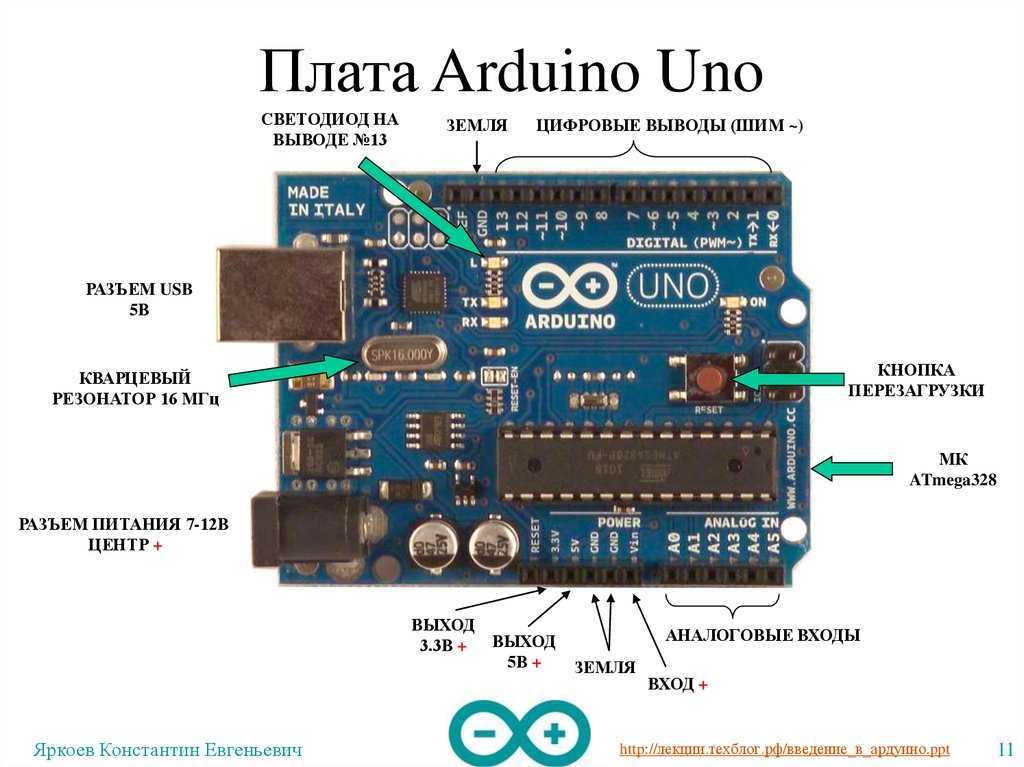
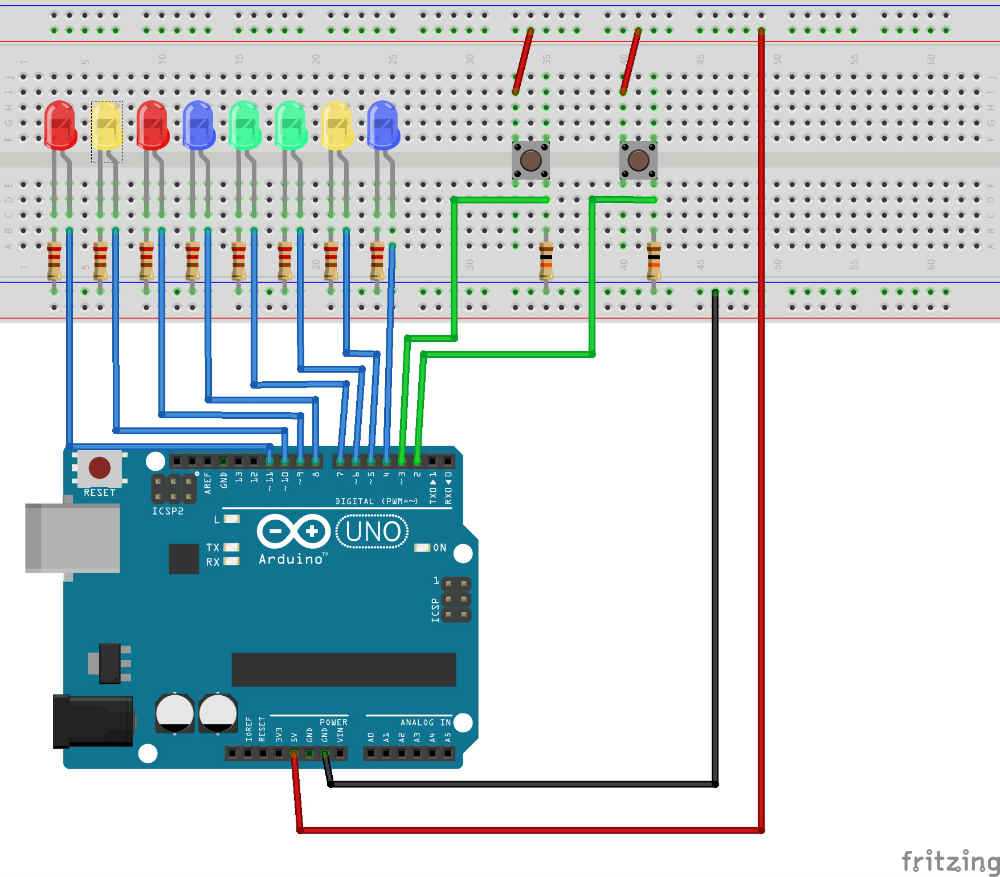
Рассмотрим какие возможности в плане ШИМ имеет плата Arduino.
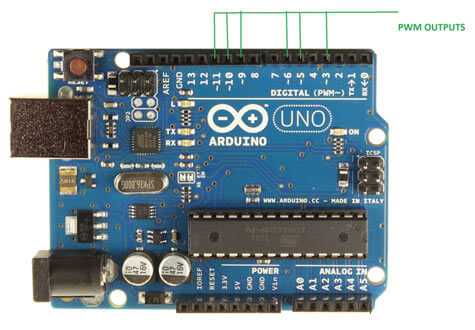
Как показано на рисунке, плата Arduino UNO имеет 6 каналов ШИМ (по англ. – PWM, Pulse Width Modulation). Мы можем использовать ШИМ на любом из этих 6 контактов. В этом проекте мы будем использовать контакт 3 (PIN3).
Также достаточно наглядно работа ШИМ в практической задаче представлена в следующей статье — вентилятор на Arduino Uno, управляемый с помощью температуры.
Широтно-импульсная модуляция — ШИМ
Разберем понятие ШИМ на примере управления скоростью вращения двигателя постоянного тока. Поставим своей целью запустить мотор на 50% от его максимальной скорости. Пусть наш двигатель идеальный и чтобы достичь заданной скорости, нам нужно в единицу времени передавать на мотор в два раза меньше мощности. Как это сделать, не меняя источник питания?
Проведем мысленный эксперимент (а кто-то может и натуральный — ничего сложного). Возьмём мотор постоянного тока с массивным маховиком, закрепленным на валу (таким маховиком может служить колесо). Подадим питание от аккумулятора и мотор начнет набирать обороты. Через какое-то время, мотор достигнет номинальной мощности, а его ротор максимальной скорости вращения. Отключим питание, и мотор постепенно начнет замедляться вплоть до полной остановки.
Следующий опыт. Снова включим мотор, и когда его скорость достигнет половины от максимальной — выключим. Заметив, что скорость падает — снова включим. И так далее. Включая и выключая питание мотора, мы заставим ротор вращаться со скоростью, близкой к половине от максимальной!
Разумеется, в силу человеческой медлительности, мотор будет удерживать заданную скорость с некоторой погрешностью. Другими словами, скорость будет «плавать» вокруг заданного значения. Чтобы минимизировать эти отклонения, нам потребуется увеличить частоту переключений. Тут уже не обойтись без автоматики.
А как заставить мотор вращаться медленнее или быстрее? Количество переданной мотору энергии будет зависеть от отношения времени когда мотор включен — tвкл к времени когда он выключен — tвыкл.
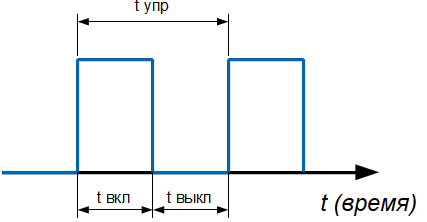
Так, для передачи мотору 50% мощности, tвкл будет равно tвыкл. Такой случай как раз изображен на графике. Чтобы мотор вращался еще медленнее, скажем с мощностью 25% от номинальной, придется время включения мотора уменьшить до этих самых 25% от общего периода управления T.
Таким образом, имея возможность менять ширину импульсов, мы можем достаточно точно управлять скоростью вращения мотора.
Собственно, рассмотренный способ управления мощностью и называется широтно-импульсной модуляцией сигнала, а сокращённо — ШИМ. Теперь рассмотрим параметры которые характеризуют ШИМ сигнал и которые следует учитывать при написании программ для микроконтроллеров.
Коэффициент заполнения (duty cycle)
Начнем с самого главного параметра — коэффициента заполнения D (он же duty cycle). Этот коэффициент равен отношению периода ШИМ сигнала к ширине импульса:
D = T / tвкл
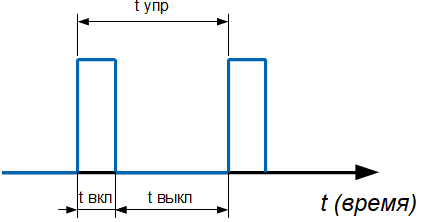
Пример ШИМ сигнала для разных значений D:

Чем больше D, тем больше мощности мы передаем управляемому устройству, например, двигателю. Так, при D = 1 двигатель работает на 100% мощности, при D = 0,5 — наполовину мощности, при D = 0 — двигатель полностью отключен.
Кстати, кроме коэффициента заполнения для характеризации ШИМ применяют и другой параметр — скважность S. Эти два параметра связаны выражением:. S = 1/T
S = 1/T
Скважность, как и коэффициент заполнения — величина безразмерная. В отличие от D, она может принимать значения от 1 до бесконечности
Но чаще всего, особенно в англоязычных источниках, используют именно D.
Частота ШИМ
Частота ШИМ определяет период импульса — T (см картинку выше). Требования к этой частоте диктуются несколькими факторами, в зависимости от типа управляемого устройства.



В случае управления светодиодами одним из главных факторов становится видимость мерцания. Чем выше частота, тем менее заметно мерцание излучаемого света. Высокая частота также помогает снизить влияние температурных скачков, которые светодиоды не любят. На практике для светодиодов достаточно иметь частоту ШИМ в пределах 100-300 Гц.
С моторами постоянного тока дела обстоят немного иначе. С одной стороны, чем больше частота, тем более плавно и менее шумно работает мотор. С другой — на высоких частотах падает крутящий момент. Нужен баланс. Более подробно о моторах мы поговорим в одной из будущих статей, а пока рекомендуем для большинства DIY задач использовать частоту ШИМ 2кГц.
Плюс, общая проблема для всех случаев управления силовой нагрузкой — потери в цепях силовой коммутации (в транзисторах, и не только), которые увеличиваются с ростом частоты ШИМ. Чем больше частота, тем большее время транзисторы находятся в переходных состояниях, активно выделяя тепло и снижая эффективность системы.
Разрешение ШИМ
Ещё один важный параметр — разрешение ШИМ сигнала. Этот параметр показывает, с какой точностью мы можем менять коэффициент заполнения. Чем больше разрешение, тем плавнее будет меняться мощность на управляемом устройстве.
Например, у платы Ардуино с базовыми настройками, разрешение ШИМ — 256. То есть мы можем изменять сигнал от 0 до 255 — не густо, но для большинства DIY задач хватает.
Понятие шима
Прежде чем дать определение упомянутому словосочетанию, следует узнать или кому-то просто напомнить себе принцип нагревания силовых компонентов радиосхемы. Их сущность заключается в действии нескольких переключательных режимах. Все электросиловые компоненты в подобных радиосхемах всегда пребывают в двух состояниях. Первое — это открытое, а второе раскрытое. В чём разница между этими двумя состояниями? В первом случае компонент обладает нулевым током. Во втором же у компонента нулевое значение напряжения. Конечным результатом взаимодействия электросиловых компонентов с необходимой напряжённостью можно считать получения сигнала той формы, которая нужна согласно установленным правилам.
Шимом же называют специальный модулятор, предназначенный для контролирования времени открытия силового ключа. Время для открытия ключа устанавливается с учётом получаемого напряжения. Получить идеальный вариант сигнала возможно лишь в том случае, если перед преобразованием сигнал без затруднений прошёл все необходимые этапы. Какие это этапы из чего состоит формирование такого сигнала.
Особенности шим — контроллера
 Сам процесс создания шим — сигналов очень непростой. Чтобы облегчить этот процесс, были придуманные специальные микросхемы. Именно микросхемы, участвующие в формировании шим — сигналов называют шим — контролёрами. Их существование в большинстве случаев помогает полностью решить проблему с формированием широко — импульсных сигналов. Чтобы легче понять миссию и значимость шим — контролёра, необходимо познакомиться с особенностями его строения. На сегодняшний день известно, что любой шим — контролёр, активно использующийся в электронике, обладает следующими составляющими:
Сам процесс создания шим — сигналов очень непростой. Чтобы облегчить этот процесс, были придуманные специальные микросхемы. Именно микросхемы, участвующие в формировании шим — сигналов называют шим — контролёрами. Их существование в большинстве случаев помогает полностью решить проблему с формированием широко — импульсных сигналов. Чтобы легче понять миссию и значимость шим — контролёра, необходимо познакомиться с особенностями его строения. На сегодняшний день известно, что любой шим — контролёр, активно использующийся в электронике, обладает следующими составляющими:
Вывод питания. Несёт большую ответственность за электрическое питание всех существующих схем. Нередко вывод питания путают с выводом контроля питания
Важно знать, что несмотря на похожие слова в названии, эти два понятия имеют совершенно разную характеристику. Это ещё раз наглядно докажет знакомство с выводом контроля питания.
Вывод контроля питания
Эта составляющая часть микросхемы следит за состоянием показателей напряжения прямо на выводе микросхемы. Главная задача вывода контроля питания — это не допустить превышение расчётной отметки. Существует одна серьёзная опасность, а именно снижения напряжения на выходе. Если напряжения снижено, транзисторы начинают открываться наполовину. Из-за неполного открытия они быстро нагреваются и в конечном счёте могут быстро выйти из строя. Поэтому умеренное напряжение — это залог долгой работы транзисторов микросхемы шим — контроллеров.
общий выход. Третий главный элемент схемы имеет форму ножки. Эта ножка, в свою очередь, подключена к общему проводу схемы, которые отвечает за питания всей системы.
Все три составляющих очень важны. Если хотя бы один из элементов по какой-то причине выходит из строя, работа всей микросхемы заметно ухудшается или совершенно прекращается.