

Устройство для регулировки заслонки
Сервопривод заслонки можно сделать даже самостоятельно. В данной ситуации электромотор имеет смысл подбирать с мощностью не более 2 кВт. В противном случае выходной вал не выдержит больших нагрузок и поломается. При сборке в первую очередь устанавливается коробка редуктора. Пневмоцилиндрические устройства используются довольно редко.
Статоры в сервопривод заслонки монтируются часто электронного типа. Конвертер устанавливается в модель только после плеча
Затем необходимо уделить внимание управленческой плате. Выходной вал в данном случае должен быть закреплен на оси
Для этого подбирают металлическую проволоку не больших размеров. В последнюю очередь останется только подсоединить проводы к конвертеру. Далее их напрямую появится возможность подключить к блоку управления.
Сервоприводные модификации линейного движения
Линейного движения сервопривод — что это? На самом деле указанное устройство является регулятором с обратной связью. На сегодняшний день модели очень востребованы. Для различных систем отопления они подходят идеально. Конвертеры в них чаще всего используются на три контакта. Статорные коробки устанавливаются различной мощности. Двигатели могут использоваться только синхронного типа.
В противном случае блоки питания не выдерживают предельного напряжения. В качестве приводов в данной ситуации применяются редукторные коробки. Для передачи крутящего момента от двигателя используются шестерни. Да сегодняшний день на рынке представлено множество модификаций с выходным валом. В данном случае регулировать скорость оборотов можно при помощи котроллера. Также следует помнить, что в устройствах имеются специальные платы. Устанавливаются они с маркировкой Р20. Смена режима в данном случае производится за счет контроллера. Роторные модификации сервоприводов в наше время встречаются довольно редко. Используются они чаще всего для управления станками.
Работа схемы и программы
Схема устройства представлена на следующем рисунке.
 В отличие от управления серводвигателем с помощью микроконтроллеров AVR в случае использования платы Arduino нам уже нет необходимости вручную устанавливать значения регистров чтобы получить нужную частоту и коэффициент заполнения управляющих сигналов для серводвигателя. Для платформы Arduino для этих целей разработаны специальные библиотеки, с помощью которых эти функции реализуются достаточно просто – необходимо в программе просто подключить заголовочные файлы этих библиотек. В этом случае мы достаточно просто сможем устанавливать позицию сервомотора с помощью сигналов ШИМ.
В отличие от управления серводвигателем с помощью микроконтроллеров AVR в случае использования платы Arduino нам уже нет необходимости вручную устанавливать значения регистров чтобы получить нужную частоту и коэффициент заполнения управляющих сигналов для серводвигателя. Для платформы Arduino для этих целей разработаны специальные библиотеки, с помощью которых эти функции реализуются достаточно просто – необходимо в программе просто подключить заголовочные файлы этих библиотек. В этом случае мы достаточно просто сможем устанавливать позицию сервомотора с помощью сигналов ШИМ.
Для задействования всей мощи библиотек Arduino по управлению серводвигателями мы должны сделать следующие вещи:
Вначале мы должны установить частоту ШИМ сигнала для управления сервомотором – в данном случае это делается простым подключением заголовочного файла “#include <Servo.h>”. С подключением этого заголовочного файла необходимая частота ШИМ сигнала для управления серводвигателем устанавливается автоматически, кроме этого открываются возможности использования различных функций для простого управления серводвигателем.
После этого мы должны определиться с именем сервомотора, которым будем управлять в программе. Делается это с помощью функции “Servo sg90sevo”, где ‘sg90servo’ – это выбранное имя для нашего сервомотора. Особенно актуально указание имен сервомоторов когда под нашим управлением будет находиться несколько сервомоторов (до 8 для Arduino) – в этом случае удобно их будет различать по данным им именам.
Далее мы должны сообщить Arduino к какому контакту подключен сервомотор, то есть на каком контакте необходимо будет формировать сигнал ШИМ. Мы это будем делать с помощью функции “Sg90.attach(3);”, которая указывает Arduino что сервомотор подключен к контакту PIN3.
Теперь все, что осталось сделать, это указать на какой угол необходимо повернуть ось серводвигателя, это можно сделать с помощью функции “Sg90.write(30);”, которая повернет ось серводвигателя на 30 градусов. В дальнейшем, если нам понадобится повернуть ось серводвигателя на какой-нибудь другой угол, то необходимо воспользоваться командой ”Sg90.write(needed_position_ angle);”. На представленной схеме у нас есть две кнопки, одна из них будет увеличивать угол поворота оси серводвигателя (вращать его против часовой стрелки), а другая – уменьшать (вращать его по часовой стрелке).
Сервоприводные модели для полиграфических станков
Для полиграфических станков модели необходимы с синхронными типами моторов. Мощность их обязана достигать 2 кВт. Параметр предельной частоты приветствуется на уровне 30 Гц. На сегодняшний день большинство производителей выпускают сервоприводы с аналоговыми потенциометрами. Также следует отметить, что редукторные коробки, как правило, используются плоские. Все это необходимо для того, чтобы устройство было компактным.
Отдельного внимания в сервоприводах данного типа заслуживают роторы. Показатель проводимости у них обязан минимум составлять 3 мк. Все это необходимо для хорошего ускорения. Выходные валы в данном случае используются небольшого диаметра. Конвертеры чаще всего можно встретить на три контакта. Для блоков питания на 20 В они подходят идеально. Статорные коробки устанавливаются различной формы и по конструкции могут сильно различаться. В этой ситуации многое зависит от энкодера, который установлен в сервоприводе.
Сервопривод крышки багажника
Современные автомобили большей частью выпускаются с автоматическим открыванием и закрыванием багажника. Для этого требуется установка сервопривода. Производители применяют 2 способа, чтобы обеспечить авто подобной опцией. Надежным вариантом является пневмопривод, но он стоит дороже. Электропривод управляется несколькими способами на выбор:
- с пульта;
- кнопка на дверной панели водителя;
- ручка на крышке багажника.
Ручное открывание не всегда удобное, особенно зимой, когда замок может замерзнуть. Сервопривод багажника совмещается с замком, что дополнительно защищает авто от несанкционированного проникновения.
Устройства применяются на иномарках, но при желании их можно установить на отечественных моделях. Предпочтительно использовать привод с электродвигателем.

Есть еще устройства с магнитными пластинами, но они сложней и применяются реже.
Самыми дешевыми являются электроприборы, предназначенные только для открывания. Можно подобрать привод багажника, состоящий из электродвигателя с инерционным механизмом, отключающийся при возникновении препятствия перемещению. Дорогие модели состоят из устройства подъема и опускания крышки, доводчика запорного механизма, контроллера и датчиков.
Установка и настройка сервопривода крышки багажника производятся на заводе, но простые устройства могут быть установлены своими руками.

Описание [ править | править код ]
Сервоприводом является любой тип механического привода (устройства, рабочего органа), имеющий в составе датчик (положения, скорости, усилия и т. п.) и блок управления приводом (электронную схему или механическую систему тяг), автоматически поддерживающий необходимые параметры на датчике (и, соответственно, на устройстве) согласно заданному внешнему значению (положению ручки управления или численному значению от других систем).
Проще говоря, сервопривод является «автоматическим точным исполнителем» — получая на вход значение управляющего параметра (в режиме реального времени), он «своими силами» (основываясь на показаниях датчика) стремится создать и поддерживать это значение на выходе исполнительного элемента.
К сервоприводам, как к категории приводов, относится множество различных регуляторов и усилителей с отрицательной обратной связью, например, гидро-, электро-, пневмоусилители ручного привода управляющих элементов (в частности, рулевое управление и тормозная система на тракторах и автомобилях), однако термин «сервопривод» чаще всего (и в данной статье) используется для обозначения электрического привода с обратной связью по положению, применяемого в автоматических системах для привода управляющих элементов и рабочих органов.
Сервоприводы в настоящее время применяются в высокопроизводительном оборудовании следующих отраслей: машиностроение; автоматические линии производства: напитков, упаковки, стройматериалов, электроники и т. д., подъемно-транспортная техника; полиграфия; деревообработка, пищевая промышленность. [ источник не указан 817 дней ]
Подключаем джойстик
Представленная на рисунке ниже схема подключения может вас немного смутить. Но поверьте, все не так сложно как кажется на первый взгляд. Опять таки для подключения используем монтажную плату.

1. На модуле джойстика один выход U/R+ и один L/R+. Это выходы для подключения питания. Эти выходы подключаются к пину 5V на Arduino.
2. Также есть два разъема L/R и два разъема U/D. Они подключаются к аналоговым входам А3 и А4.
3. Земля на джойстике подключается к земле на Arduino.
Не забудьте перепроверить подключение. Помните, что большинство ошибок в проектах возникает именно из-за неправильного подключения. Особенно если вы используете монтажную плату, которая обрастает кучей коннекторов.
Как собрать модель?
Сделать сервопривод своими руками довольно просто. Если рассматривать простую модификацию, то в первую очередь следует подобрать корпус для устройства. В данном случае многое зависит от габаритов привода. Для самодельного устройства целесообразнее использовать маломощный электродвигатель. При этом редукторная коробка должна быть установлена рядом.
Далее, чтобы собрать сервопривод своими руками, нужно подобрать потенциометр аналогового типа. В магазине его найти не составит труда. После этого следует заняться установкой датчика. Как правило, плата управления подбирается серии РР20. Для поворотных регуляторов она подходит хорошо. В конце работы останется только установить конвертер. Все это необходимо для того, чтобы подсоединить устройство к сети.
Электрический сервопривод для отопления
Более совершенным устройством является электрический сервопривод для отопления или теплого пола. Он включает систему взаимосвязанных механизмов, обеспечивающих поддерживание температуры воздуха в помещении.


![Сервоприводы pdm с удержанием угла: особенности применения и примеры кода [амперка / вики]](https://magazinzing.ru/wp-content/uploads/2/c/d/2cd1f49b2f7ce7278d80cf9dfeabe10d.png)







Сервопривод для отопления работает вместе с термостатом, который монтируется на стену. Кран с электроприводом устанавливается на подающей трубе, перед коллектором водяного теплого пола. Затем производится подключение, подача питания 220 В и установка на терморегуляторе заданного режима. Система снабжается двумя датчиками: один — в полу, а другой — в комнате. Они передают команды на термостат, который управляет сервоприводом, соединенным с краном. Точность регулирования будет выше, если установить еще прибор на улице, поскольку климатические условия постоянно меняются и влияют на температуру в помещениях.
Сервопривод управляет двух- или трехходовым клапаном. Первый изменяет температуру теплоносителя в системе отопления. Трехходовой клапан с сервоприводом поддерживает температуру постоянной, но изменяет расход горячей воды, подаваемой в контуры. Од содержит 2 входа для горячей жидкости (подающий трубопровод) и холодной (обратка). Выход всего один, через него подается смесь с заданной температурой. Клапан обеспечивает смешивание потоков, регулируя таким путем подачу тепла в коллекторы. Если один из входов открывается, то другой начинает прикрываться. При этом расход на выходе остается постоянным.

Как подключить к Ардуино серво с джойстиком
Для этого занятия потребуется:
- Arduino Uno / Arduino Nano / Arduino Mega;
- микро сервопривод;
- джойстик ky-023;
- провода «папа-папа», «папа-мама».

Схема подключения сервопривода к Ардуино с джойстиком
Подключите к плате Ардуино сервомотор и джойстик, согласно схеме, изображенной на картинке выше. И загрузите следующий скетч в микроконтроллер, позволяющий сделать плавное управление сервоприводом с помощью джойстика на Ардуино. В программе мы используем функцию map(), которая преобразует числовой диапазон значений 0-1023, в новый диапазон чисел 0-180 (угол поворота серво).
Скетч. Управление сервоприводом с помощью джойстика
#define pinX A1 // ось X джойстика
#include <Servo.h> // подключаем библиотеку для серво
Servo servo1; // объявляем объект servo1
void setup() {
pinMode(pinX, INPUT); // указываем пин для джойстика
servo1.attach(9); // указываем пин для микро серво
}
void loop() {
int X = analogRead(pinX); // считываем значение оси X
X = map(X, 0, 1023, 0, 180); // переводим значение X в новый диапазон
servo1.write(X); // поворачиваем серво от джойстика
}
Пояснения к коду:
с помощью map() можно задать любой диапазон чисел, в том числе обратный;
обратите внимание, что у разных производителей распиновка джойстика может отличаться, от представленной выше схемы подключения модуля к плате.

Схема подключения двух сервоприводов к Ардуино с джойстиком
Скетч. Управление двумя серво с помощью джойстика
#define pinX A1 // ось X джойстика
#define pinY A0 // ось Y джойстика
#include <Servo.h> // подключаем библиотеку для серво
Servo servo1; // объявляем объект servo1
Servo servo2; // объявляем объект servo2
void setup() {
pinMode(pinX, INPUT); // указываем пин для джойстика
pinMode(pinY, INPUT); // указываем пин для джойстика
servo1.attach(9); // указываем пин для первого серво
servo2.attach(11); // указываем пин для второго серво
}
void loop() {
int X = analogRead(pinX); // считываем значение оси X
int Y = analogRead(pinY); // считываем значение оси Y
X = map(X, 0, 1023, 0, 180); // переводим значение X в новый диапазон
Y = map(Y, 0, 1023, 0, 180); // переводим значение Y в новый диапазон
servo1.write(X); // поворачиваем первый серво
servo2.write(Y); // поворачиваем второй серво
}
Пояснения к коду:
- в данной программе мы лишь добавили новую локальную переменную для значений оси Y джойстика, чтобы управлять вторым серво.
Виды и характеристики
Серводвигатели выпускаются в самых разных вариантах, позволяющих использовать их во многих областях. Основные конструкции разделяются на коллекторные и , предназначенные для работы от постоянного и переменного тока.
Кроме того, каждый сервомотор может быть синхронным и асинхронным. Синхронные устройства обладают способностью задавать высокоточную скорость вращения, а также углы поворотов и ускорение. Эти приводы очень быстро набирают номинальную скорость вращения. Сервоприводы в асинхронном исполнении управляются за счет изменения параметров питающего тока, когда его частота меняется с помощью инвертора. Они с высокой точностью выдерживают заданную скорость даже при самых низких оборотах.

В зависимости от принципиальной схемы и конструкции, сервоприводы могут быть электромеханическими и электрогидромеханическими. Первый вариант, включающий редуктор и двигатель, отличается низким быстродействием. Во втором случае действие происходит очень быстро за счет движения поршня в цилиндре.
Каждый сервопривод характеризуется определенными параметрами:
- Крутящий момент или усилие, создаваемое на валу. Считается наиболее важным показателем работы сервопривода. Для каждой величины напряжения существует собственный крутящий момент, отражаемый в паспорте изделия.
- Скорость поворота. Данный параметр представляет собой определенный период времени, который требуется, чтобы изменить позицию выходного вала на 600. Эта характеристика также зависит от конкретного значения напряжения.
- Максимальный угол поворота, на который может развернуться выходной вал. Чаще всего эта величина составляет 180 или 3600.
- Все сервоприводы разделяются на цифровые и аналоговые. В зависимости от этого и осуществляется управление сервоприводом.
- Питание серводвигателей. В большинстве моделей используется напряжение от 4,8 до 7,2В. Питание и управление осуществляется с помощью трех проводников.
- Возможность модернизации в сервопривод постоянного вращения.
- Материалы для редуктора могут использоваться самые разные. Шестерни изготавливаются из металла, карбона, пластика или комбинированных составов. Каждый из них обладает своими преимуществами и недостатками. Например, пластиковые детали плохо выдерживают ударные нагрузки, но устойчивы к износу в процессе длительной эксплуатации. Металлические шестерни, наоборот, быстро изнашиваются, зато они обладают высокой устойчивостью к динамическим нагрузкам.
Управление сервоприводом. Интерфейс управляющих сигналов
Чтобы указать сервоприводу желаемое положение, по предназначенному для этого проводу необходимо посылать управляющий сигнал. Управляющий сигнал — импульсы постоянной частоты и переменной ширины.
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал поступает в управляющую схему, имеющийся в ней генератор импульсов производит свой импульс, длительность которого определяется через потенциометр. Другая часть схемы сравнивает длительность двух импульсов. Если длительность разная, включается электромотор. Направление вращения определяется тем, какой из импульсов короче. Если длины импульсов равны, электромотор останавливается.
Чаще всего в хобби-сервах импульсы производятся с частотой 50 Гц. Это значит, что импульс испускается и принимается раз в 20 мс. Обычно при этом длительность импульса в 1520 мкс означает, что сервопривод должен занять среднее положение. Увеличение или уменьшение длины импульса заставит сервопривод повернуться по часовой или против часовой стрелки соответственно. При этом существуют верхняя и нижняя границы длительности импульса. В библиотеке Servo для Arduino по умолчанию выставлены следующие значения длин импульса: 544 мкс — для 0° и 2400 мкс — для 180°.
Обратите внимание, что на вашем конкретном устройстве заводские настройки могут оказаться отличными от стандартных. Некоторые сервоприводы используют ширину импульса 760 мкс. Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс
Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс.
Также стоит отметить, что это всего лишь общепринятые длины. Даже в рамках одной и той же модели сервопривода может существовать погрешность, допускаемая при производстве, которая приводит к тому, что рабочий диапазон длин импульсов немного отличается. Для точной работы каждый конкретный сервопривод должен быть откалиброван: путём экспериментов необходимо подобрать корректный диапазон, характерный именно для него.
На что ещё стоит обратить внимание, так это на путаницу в терминологии. Часто способ управления сервоприводами называют PWM/ШИМ (Pulse Width Modulation) или PPM (Pulse Position Modulation). Это не так, и использование этих способов может даже повредить привод
Корректный термин — PDM (Pulse Duration Modulation). В нём крайне важна длина импульсов и не так важна частота их появления. 50 Гц — это норма, но сервопривод будет работать корректно и при 40, и при 60 Гц. Единственное, что нужно при этом иметь в виду — это то, что при сильном уменьшении частоты он может работать рывками и на пониженной мощности, а при сильном завышении частоты (например, 100 Гц) может перегреться и выйти из строя
Это не так, и использование этих способов может даже повредить привод. Корректный термин — PDM (Pulse Duration Modulation). В нём крайне важна длина импульсов и не так важна частота их появления. 50 Гц — это норма, но сервопривод будет работать корректно и при 40, и при 60 Гц. Единственное, что нужно при этом иметь в виду — это то, что при сильном уменьшении частоты он может работать рывками и на пониженной мощности, а при сильном завышении частоты (например, 100 Гц) может перегреться и выйти из строя.
vri-cnc.ru
Шаговые двигатели – дешевле. Однако сервоприводы обладают широким рядом достоинств, в том числе высокой производительностью и точностью позиционирования. Так что же выбрать?
Что такое шаговый электродвигатель
 Шаговый электродвигатель – это безщеточный синхронный электродвигатель постоянного тока, имеющий несколько обмоток статора. При подаче тока в одну из обмоток ротор поворачивается, а затем фиксируется в определенном положении. Последовательное возбуждение обмоток через контроллер управления шаговым двигателем позволяет вращать ротор на заданный угол.
Шаговый электродвигатель – это безщеточный синхронный электродвигатель постоянного тока, имеющий несколько обмоток статора. При подаче тока в одну из обмоток ротор поворачивается, а затем фиксируется в определенном положении. Последовательное возбуждение обмоток через контроллер управления шаговым двигателем позволяет вращать ротор на заданный угол.
Шаговые электродвигатели широко применяются в промышленности, так как имеют высокую надежность и длительный срок службы. Главное преимущество шаговых двигателей – точность позиционирования. При подаче тока на обмотки ротор провернется строго на определенный угол.
Положительные стороны шагового двигателя
·Устойчивость в работе;
·Высокий крутящий момент на малых и нулевых скоростях;
·Быстрый старт, остановка и реверс;
·Работа под высокой нагрузкой без риска выхода из строя;
·Единственный механизм износа, влияющий на длительность эксплуатации – подшипники;
·Невысокая стоимость.
Отрицательные стороны шагового двигателя
·Высокий уровень шума;
·Возможность появления резонанса;
·Постоянный расход электроэнергии вне зависимости от нагрузки;
·Падение крутящего момента на высоких скоростях;
·Отсутствие обратной связи при позиционировании;
·Низкая пригодность к ремонту.
Что такое серводвигатель (сервопривод)
 Серводвигатель (сервопривод) – это электрический мотор с управлением через обратную отрицательную связь, которая позволяет точно управлять параметрами движения, чтобы достичь необходимой скорости или получить нужный угол поворота. В состав серводвигателя входят непосредственно сам электродвигатель, датчик обратной связи, блок питания и управления.
Серводвигатель (сервопривод) – это электрический мотор с управлением через обратную отрицательную связь, которая позволяет точно управлять параметрами движения, чтобы достичь необходимой скорости или получить нужный угол поворота. В состав серводвигателя входят непосредственно сам электродвигатель, датчик обратной связи, блок питания и управления.




![Драйвер сервоприводов multiservo shield v2 [амперка / вики]](https://magazinzing.ru/wp-content/uploads/a/8/2/a82a7910a375670ec07ea5d273ec9ae7.png)


![Драйвер сервоприводов multiservo shield v1 [амперка / вики]](https://magazinzing.ru/wp-content/uploads/0/f/e/0fead6007155d433fdbad2016dd98e70.png)

![Сервоприводы pdm постоянного вращения: особенности применения и примеры кода [амперка / вики]](https://magazinzing.ru/wp-content/uploads/b/3/3/b3307cd028be5877df90050a819dafd0.png)
Конструктивные особенности электродвигателей для сервопривода мало чем отличаются от обычных электродвигателей имеющих статор и ротор, работающих на постоянном и переменном токе, с щетками и без щеток. Особую роль здесь играет датчик обратной связи, который может быть установлен как непосредственно в самом двигателе и передавать данные о положении ротора, так и определять его позиционирование по внешним признакам. С другой стороны, работа серводвигателя немыслима без блока питания и управления (он же инвертор или сервоусилитель), который преобразует напряжение и частоту тока, подаваемого на электродвигатель, тем самым управляя его действием.
Положительные стороны серводвигателя (сервопривода)
·Высокая мощность при малых размерах;
·Высокий крутящий момент;
·Быстрый разгон и торможение;
·Постоянное и бесперебойное отслеживание положения;
·Низкий уровень шума, отсутствие вибраций и резонанса;
·Широкий диапазон скорости вращения;
·Высокая скорость разгона;
·Точное позиционирование;
·Стабильная работа в широком диапазоне скоростей;
·Малая масса и компактная конструкция;
·Низкий расход электроэнергии при малых нагрузках.
Отрицательные стороны серводвигателя (сервопривода)
·Требовательность к периодическому обслуживанию (например, с заменой щеток);
·Дорогостоящий ремонт;
·Сложность устройства (наличие датчика, блока питания и управления) и логики его работы.
·Высокая стоимость.
Сервопривод или шаговый двигатель?
Сравнивая характеристики сервопривода и шагового двигателя, следует обратить внимание, прежде всего, на их производительность и стоимость. Для производства фасадов МДФ на небольшом предприятии, работающем с малыми объемами, думаю, нет необходимости переплачивать за установку на фрезерный станок с ЧПУ дорогостоящих серводвигателей. С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла
С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла
С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла
Для производства фасадов МДФ на небольшом предприятии, работающем с малыми объемами, думаю, нет необходимости переплачивать за установку на фрезерный станок с ЧПУ дорогостоящих серводвигателей. С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла.
Как работает клешня «хватайки»
Как конкретно работает клешня, в профессиональном аппарате, я не разглядел, поскольку механика была прикрыта защитным кожухом, поэтому пришлось поэкспериментировать. Поломав некоторое время голову, получилось придумать более-менее рабочий вариант: клешня состоит из четырех «пальцев», которые одним концом фиксируются на неподвижной раме. Так же добавил крестовину, с ней «пальцы» имеют шарнирное соединение примерно посередине. К неподвижной части рамы жестко зафиксировал сервопривод, качалка которого опускает и поднимает ось. Крестовина в свою очередь жестко закреплена к оси и вместе с ней совершает движения вверх и вниз, из-за чего и происходит сжатие и раскрытие клешни. Чтобы было понятнее, ниже находится картинка с клешней. Изображение можно вращать с помощью мышки, зажав ЛКМ и перемещая влево или вправо.





















С изготовлением клешни особо не мучался и напечатал ее на 3D принтере.
Дополнительные возможности
Управление сервоприводами на Ардуино очень простое и мы можем использовать еще несколько интересных фишек.
Контроль точного времени импульса
Ардуино имеет встроенную функцию servo.write(градусы), которая упрощает управление сервомоторами. Однако не все сервоприводы соблюдают одинаковые тайминги для всех позиций. Обычно 1 миллисекунда означает 0 градусов, 1,5 миллисекунды – 90 градусов, и, конечно, 2 миллисекунды означают 180 градусов. Некоторые сервоприводы имеют меньший или больший диапазон.
Для лучшего контроля мы можем использовать функцию servo.writeMicroseconds(микросекунды), которая в качестве параметра принимает точное количество микросекунд. Помните, 1 миллисекунда равна 1000 мкс.
Несколько сервоприводов
Чтобы использовать более одного сервопривода в Ардуино нам нужно объявить несколько серво-объектов, прикрепить разные контакты к каждому из них и обратиться к каждому индивидуально. Итак, нам нужно объявить объекты – столько сколько нам нужно:
Затем нам нужно прикрепить каждый объект к сервомотору. Помните, что каждый сервопривод использует отдельный пин:
В конце концов, мы должны обращаться к каждому объекту индивидуально:
Подключение. Земля сервоприводов идёт на GND Arduino, питание на 5В или VIN (в зависимости от входа). И, в конце концов, каждый привод должен быть подключен к отдельному цифровому выводу.
Вопреки распространенному мнению, сервоприводами не нужно управлять через пины PWM – любой цифровой пин подойдет и будет работать.
Управление мышью
Чтобы управлять серво с помощью мыши, вот простой код:
Вам не обязательно использовать этот код, вы также можете отправлять команды на плату arduino с серийного монитора Arduino IDE. Позиция сервопривода от 0 до 180 – это команды 0 и 180 сек соответственно.
В основном этот код берет позицию mouseX (от 0 до 720) и делит на 4, чтобы получить угол для сервопривода (0-180). Наконец, значение выводится на последовательный порт с префиксом ‘s’.










Примечание: «s» на самом деле должен быть суффиксом, но поскольку это повторяется, это не имеет значения для результата.
Не забудьте сначала проверить с помощью println(Serial.list ()) COM-порт, который следует использовать.
Сервоприводы с непрерывным вращением
Существует специальные типы сервоприводов, обозначенные как сервоприводы непрерывного вращения. В то время как нормальный сервопривод переходит в определенную позицию в зависимости от входного сигнала, сервопривод непрерывного вращения вращается по часовой стрелке или против часовой стрелки со скоростью, пропорциональной сигналу.
Например, функция Servo1.write(0) заставит сервомотор вращаться против часовой стрелки на полной скорости. Функция Servo1.write(90) остановит двигатель, а Servo1.write(180) будет вращать вал по часовой стрелке на полной скорости.
Таким сервоприводам нашли несколько применений, но нужно понимать, что они достаточно медленные. Один из вариантов – микроволновая печь, когда есть необходимость в двигателе для вращения продуктов питания. Но будьте осторожны, микроволны – опасное дело!
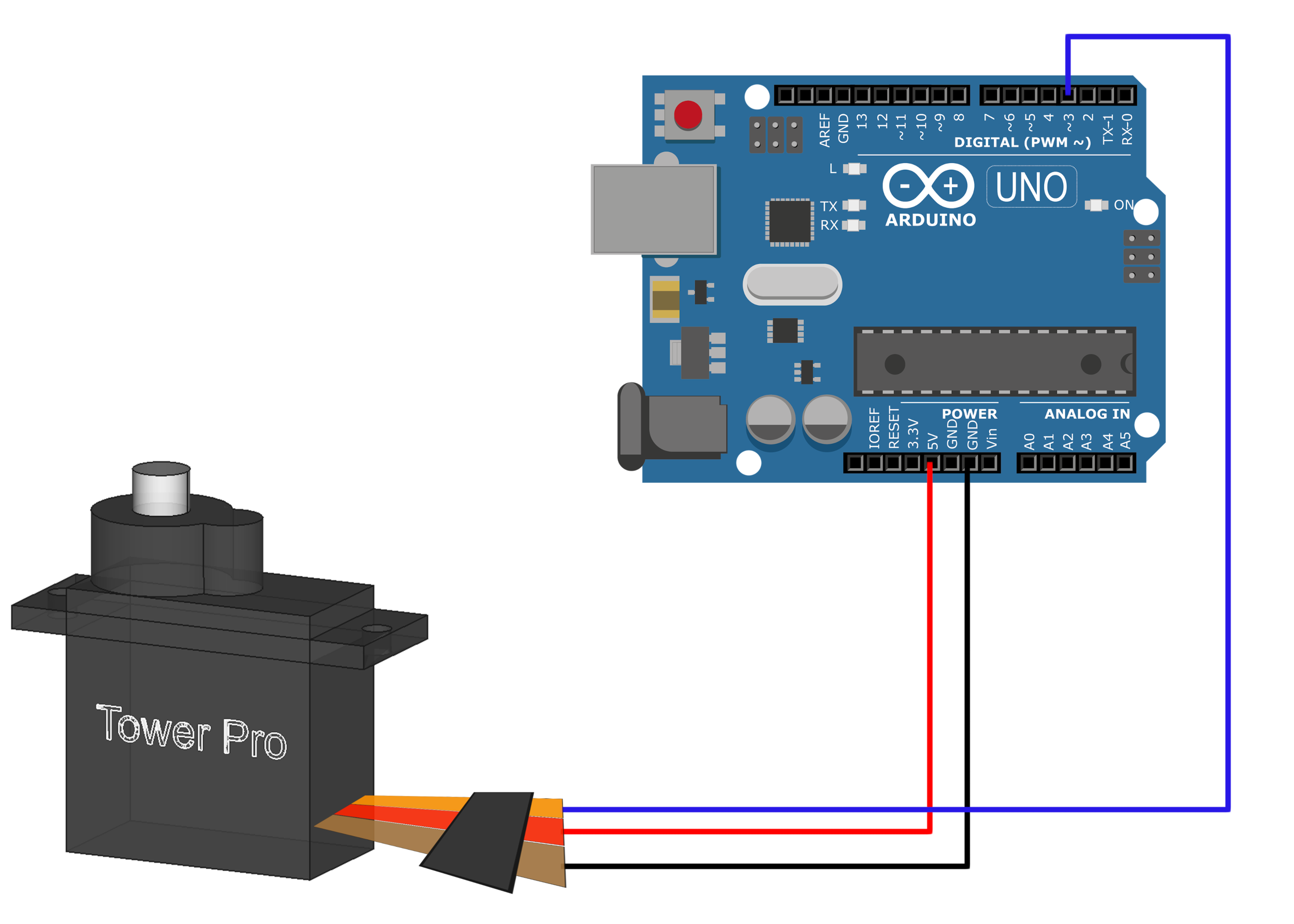
Маленький сервопривод SG90. Размеры: 22.6 x 21.8 x 11.4 мм. Вполне подойдет для использования в радиоуправляемых моделях. Имеет три вывода: Плюс, Минус и Сигнал. Вращение ротора осуществляется на 180 градусов. Обеспечиваемый момент вращения при 4,8 В около 1,98 кг*см. Скорость вращения — 60 градусов за 0,14 сек. Рабочее напряжение от 3,5 до 7,2 Вольт. Подключение сервопривода SG90.
Обозначение проводов сервопривода SG90: Красный — Плюс питания Коричневый — Минус питания GND Желтый — Сигнал
Программа для Ардуино:
#include /подключение библиотеки для работы с сервоприводом Servo myservo;
void setup() <myservo.attach(5); /pin к которому подключим желтый сигнальный провод от SG90 > void loop() <myservo.write(0); /угол 0 градусов delay(2000); myservo.write(90); /угол 90 градусов delay(2000); myservo.write(180); /угол 180 градусов delay(2000);
for (int p=179; p>=1; p—) / медленно возвращаемся к нулю <myservo.write(p); delay(20); > >
Видео работы SG90
В данной статье рассматриваются сервоприводы: их устройство, предназначение, подсказки по подключению и управлению, разновидности сервоприводов и их сравнение. Давайте приступим и начнём с того, что же такое сервопривод.