
Осуществление переключения и контроля двигателей
Данная разновидность двигателей имеет два режима: они могут быть включёнными, либо отключёнными. Такое переключение делается переключателями, реле, транзисторами или же МОП-транзисторами.
В схеме управления используется биполярный транзистор, он играет ключевую роль в переключении режимов.
Контроль скорости двигателя
Потому как скорость данной разновидности двигателей является пропорциональной напряжению на клеммах, можно использовать транзистор для регулирования напряжения на них. Эти два транзистора подключены как пара для управления током главного ротора.
Регулировка скорости импульса
Скорость вращения данной разновидности электрических двигателей является пропорциональной среднему давлению на второй клемме.
Изменение направления движения двигателя постоянного тока
Есть много преимуществ в управлении скоростью данной разновидности электрических двигателей, но есть один большой недостаток: направление вращения всегда одно и то же. Во многих случаях машина действует по простому принципу, чтобы двигаться вперед и назад. H-мостовая схема двигателя.
Базовая конфигурация четырех переключателей, будь то электромеханические реле или транзисторы, аналогична букве Н с двигателем, расположенным на шине посередине.
Способы пуска в ход двигателей постоянного тока
П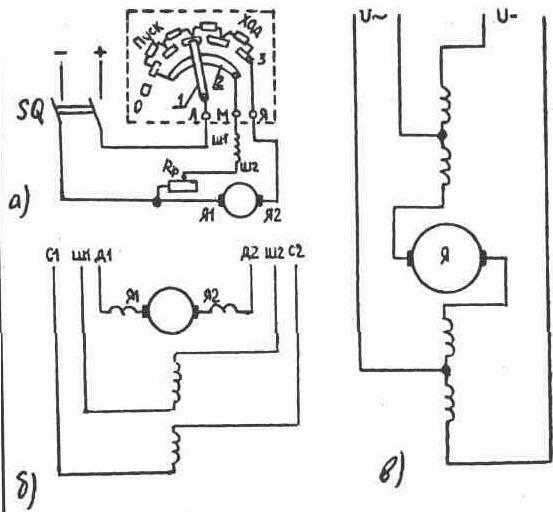 ри включении двигателя возникает большой пусковой ток, превышающий номинальный в 10 — 20 раз. Для ограничения пускового тока двигателей мощностью более 0,5 кВт последовательно с цепью якоря включают пусковой реостат (рис. 7).Величину сопротивления пускового реостата можно определить по выражению
ри включении двигателя возникает большой пусковой ток, превышающий номинальный в 10 — 20 раз. Для ограничения пускового тока двигателей мощностью более 0,5 кВт последовательно с цепью якоря включают пусковой реостат (рис. 7).Величину сопротивления пускового реостата можно определить по выражению
Rn =U/(1,8 — 2,5)Iном-Rя
где U — напряжение сети, В;
Iном — номинальный ток двигателя. А;
Rя — сопротивление обмотки якоря, Ом.
Механическая характеристика двигателей постоянного тока (n=f(M)) с параллельным, последовательным и смешанным возбуждением.
Двигатели постоянного тока находят широкое применение в промышленных, транспортных и других установках, где требуется широкое и плавное регулирование скорости вращения (прокатные станы, мощные металлорежущие станки, электрическая тяга на транспорте и т. д.).
Рис 10-1 Энергетическая диаграмма двигателя параллельного возбуждения
Электродвигатель – это просто устройство для эффективного преобразования электрической энергии в механическую.
В основе этого преобразования лежит магнетизм. В электродвигателях используются постоянные магниты и электромагниты, кроме того, используются магнитные свойства различных материалов, чтобы создавать эти удивительные устройства.
Существует несколько типов электродвигателей. Отметим два главных класса: AC и DC.
Электродвигатели класса AC (Alternating Current) требуют для работы источник переменного тока или напряжения (такой источник Вы можете найти в любой электрической розетке в доме).
Электродвигатели класса DC (Direct Current) требуют для работы источник постоянного тока или напряжения (такой источник Вы можете найти в любой батарейке).
Универсальные двигатели могут работать от источника любого типа.
Не только конструкция двигателей различна, различны способы контроля скорости и вращающего момента, хотя принцип преобразования энергии одинаков для всех типов.
Электродвигатели используются повсюду. Даже дома вы можете обнаружить огромное количество электродвигателей. Электродвигатели используются в часах, в вентиляторе микроволновой печи, в стиральной машине, в компьютерных вентиляторах, в кондиционере, в соковыжималке и т. д. и т. п. Ну а электродвигатели, применяемые в промышленности, можно перечислять бесконечно. Диапазон физических размеров – от размера со спичечную головку до размера локомотивного двигателя.
Показанный ниже промышленный электродвигатель работает и на постоянном, и на переменном токе. Его статор – это электромагнит, создающий магнитное поле. Обмотки двигателя поочередно подключаются через щетки к источнику питания. Одна за другой они поворачивают ротор на небольшой угол, и ротор непрерывно вращается.
Рабочие моменты
Давайте разберем некоторые характеристики и особенности машин постоянного тока.
Пуск и режим реверса
 К электрическому двигателю подключен регулятор оборотов
К электрическому двигателю подключен регулятор оборотов
В момент, когда двигатель запускается, якорь имеет неподвижное положение, а значит, ЭДС в нем равна нулю. Из-за того, что сопротивление якорной обмотки очень маленькое, пусковой тока якоря намного превышает номинальный. Если представить себе такой пуск двигателя, то он однозначно бы вышел из строя.
- Чтобы такого не происходило, пусковой ток в двигателях постоянного тока с параллельным возбуждением ограничивается за счет включенного в цепь пускового реостата.
- Пуск при этом необходимо производить при номинальном значении магнитного потока, благодаря чему увеличивается пусковой момент и быстро растет ЭДС в обмотке якоря. В результате двигатель разгоняется быстрее, а время, когда проходит большой пусковой ток по обмотке сокращается.
- Когда разгон двигателя завершается, реостат выводится из цепи – делается это либо плавно, либо ступенчато.
- Для того чтобы остановить двигатель, достаточно отключить подачу питания к нему.
- Для любого электрического двигателя доступен режим вращения в обратном направлении – реверс. Для этого нужно всего лишь изменить направление тока либо в обмотке якоря, либо в обмотке статора.
Потери мощности и КПД
 Даже самый технически совершенный двигатель постоянного тока не может работать без потерь мощности
Даже самый технически совершенный двигатель постоянного тока не может работать без потерь мощности
Любой двигатель или генератор постоянного тока работает с потерями мощности. Их делят на два типа: основные и добавочные.
- К первым относят магнитные, электрические и механические.
- Магнитные потери, происходящие в стали обозначают ΔРс. Происходят они из-за того, что во время вращения сердечник на якоре постоянно перемагничивается, поэтому возникают потери на гистерезис и вихревые токи.
- Электрические потери (ΔРэл) происходят из-за активного сопротивления обмоток, а также сопротивления щеточного контакта, то есть данное значение представляется в виде суммы указанных потерь.
- Механические (ΔРмех) включают потери на трение подшипников, трение щеток о коллектор, трение вращающегося якоря о воздух (и такое есть) и вентиляционные потери.
- Все остальные потери называются добавочными и связаны они в основном с взаимодействием различных частей агрегата с магнитным полем.
 Потери незначительны при отсутствующей нагрузке
Потери незначительны при отсутствующей нагрузке
Для расчета каждого типа потерь применяются специальные формулы. Мы не будем так глубоко вдаваться в суть, а скажем лишь, что КПД машины постоянного тока определяется отношением отдаваемой мощности, к потребляемой. Выражают данное значение обычно в процентах.
Современные машины постоянного тока стали очень эффективными. КПД у них обычно варьируется в пределах 75-90%.


![Как работает электродвигатель [для чайников]](https://magazinzing.ru/wp-content/uploads/8/4/e/84e58781bcc8c4066ac8f95b0b411daf.jpeg)




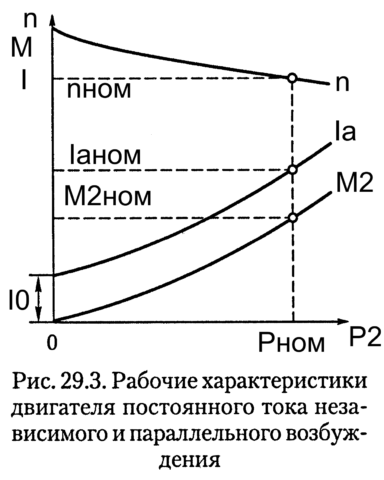
Рабочие характеристики
 Рабочие характеристики ДПТ
Рабочие характеристики ДПТ
Рабочие характеристики представляют собой следующие зависимости:
- Скорости вращения, потребляемого тока и мощности двигателя;
- КПД от полезной мощности при условии, что напряжение питания неизменно.
- Тока обмотки возбуждения и отсутствия добавочного сопротивления в цепи якоря.
Все эти параметры позволяют говорить о свойствах двигателей в режиме эксплуатации, а также находить оптимальные и экономичные режимы их работы.
Регулировка скорости вращения двигателя
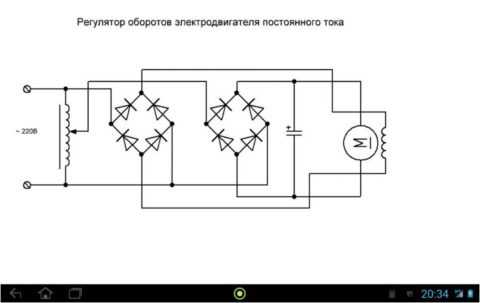 Принципиальная схема регулятора оборотов вращения
Принципиальная схема регулятора оборотов вращения
Регулировать скорость вращения машины постоянного тока можно тремя способами: изменение напряжения сети, реостатное регулирование, изменение магнитного потока. Давайте обо всем по порядку.
- Изменение напряжения осуществляется за счет устройств, которые могут, собственно, менять величину напряжения.
- Реостатное регулирование, как мы уже упоминали по ходу статьи, нуждается во введении в цепь якоря дополнительных резисторов активного типа, то есть меняющих свои характеристики при определенных условиях.
- Регулирование магнитного потока происходит за счет уменьшения тока возбуждения.
Конечно, мы назвали не все характеристики машин постоянного тока, а лишь основные, но для ознакомления с этими агрегатами этого вполне достаточно.
Видео в этой статье продемонстрирует, как работают данные устройства.
Синхронный и асинхронный двигатели переменного тока
Двигатели переменного тока подразделяют на синхронные и асинхронные. Для постоянного тока это разделение не имеет особого смысла. Ведь там нет как такового понятия фаза и изменения направления тока.
Логика работы в обоих двигателях одинаковая. Но, судя по названию, в асинхронном что-то должно происходить ни в такт с основным процессом.
Синхронный и асинхронный двигатели отличаются преимущественно конструкцией ротора.
В роторе синхронного двигателя предусмотрена обмотка с независимой подачей напряжения или постоянные магнитики. Они толкают ротор относительно пульсирующего магнитного поля.
Ротор синхронного двигателя
У асинхронного ротора ток формируется с помощью магнитного статорного поля. В соответствии с законом электромагнитной индукции под действием прямого и обратного магнитных потоков в обмотке ротора станет действовать электродвижущая сила. Ротор похож по своей конструкции на колесо для грызуна. Но бывают и варианты с обмоткой, расположенной определенным образом.
Ротор асинхронного двигателя
В синхронном двигателе поля статора и ротора взаимодействуют друг с другом и имеют равную скорость. Ротор вращается в соответствии и точно в такт с полем статора. Частота вращения ротора синхронна частоте тока обмотки статора.
Не забываем, что обмотка ротора асинхронного двигателя, будь-то клетка или катушки под 120 градусов, является замкнутым контуром. В ней наводится ЭДС, а возникающий магнитный поток придает вращение ротору, отталкиваясь от пульсирующего магнитного поля статора. Движется эта кухня в направлении движения магнитного потока статора. Вращающий электромагнитный момент пытается уравнять скорости вращения магнитных полей статора и ротора, но это не всегда получается (а лучше сказать — никогда). Ведь уровнять эти моменты можно лишь в случае, если создавать поля одновременно, как в синхронном двигателе. Также влияет механическая нагрузка, которая подключена к валу ротора и мешает догнать поле. Но и в свободном состоянии эти цифры будут различаться. Ведь у любого механизма имеется некоторая инертность, а на время появления поля в замкнутой клетке (т.е. роторе асинхронного двигателя) тоже требуется время.
Вообщем-то, это основные вещи, которые вам следует уяснить. Всё остальное — это погружение в особенности конструкций конкретных агрегатов.
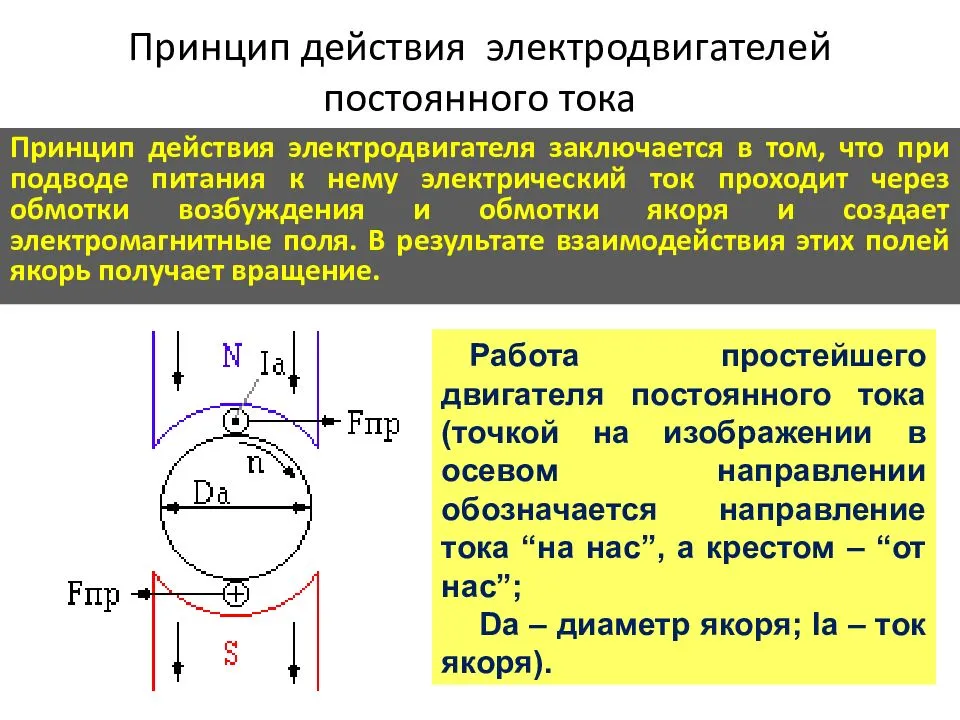
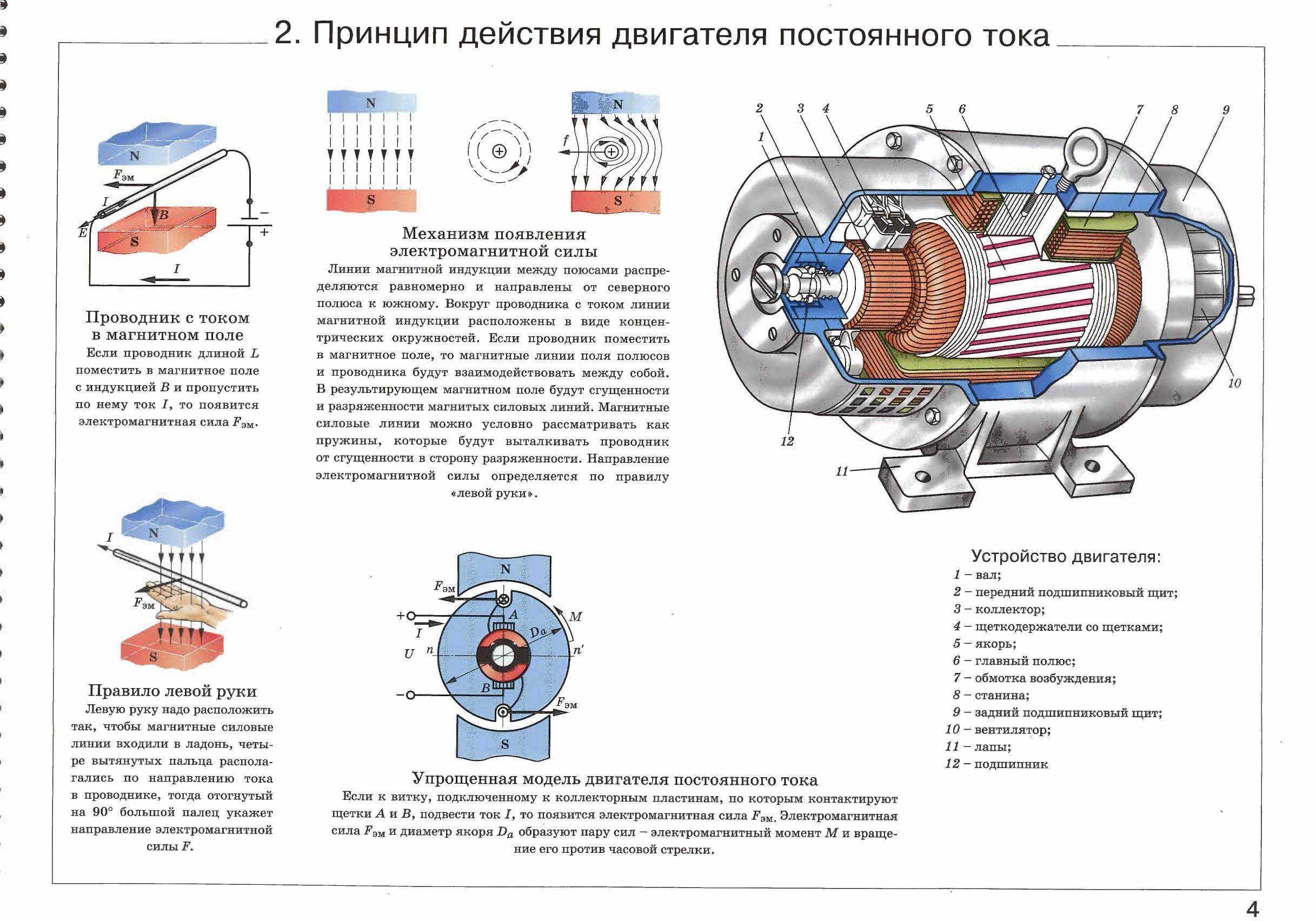
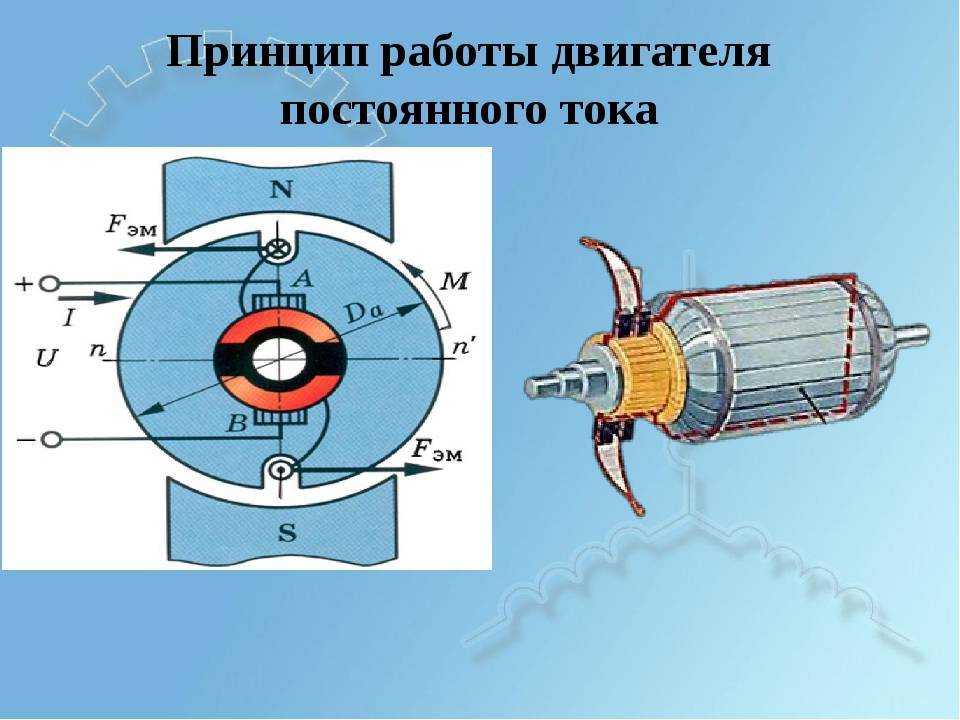
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
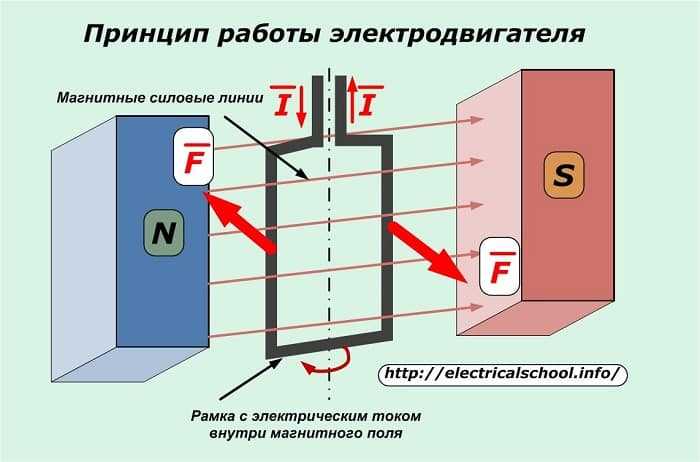
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
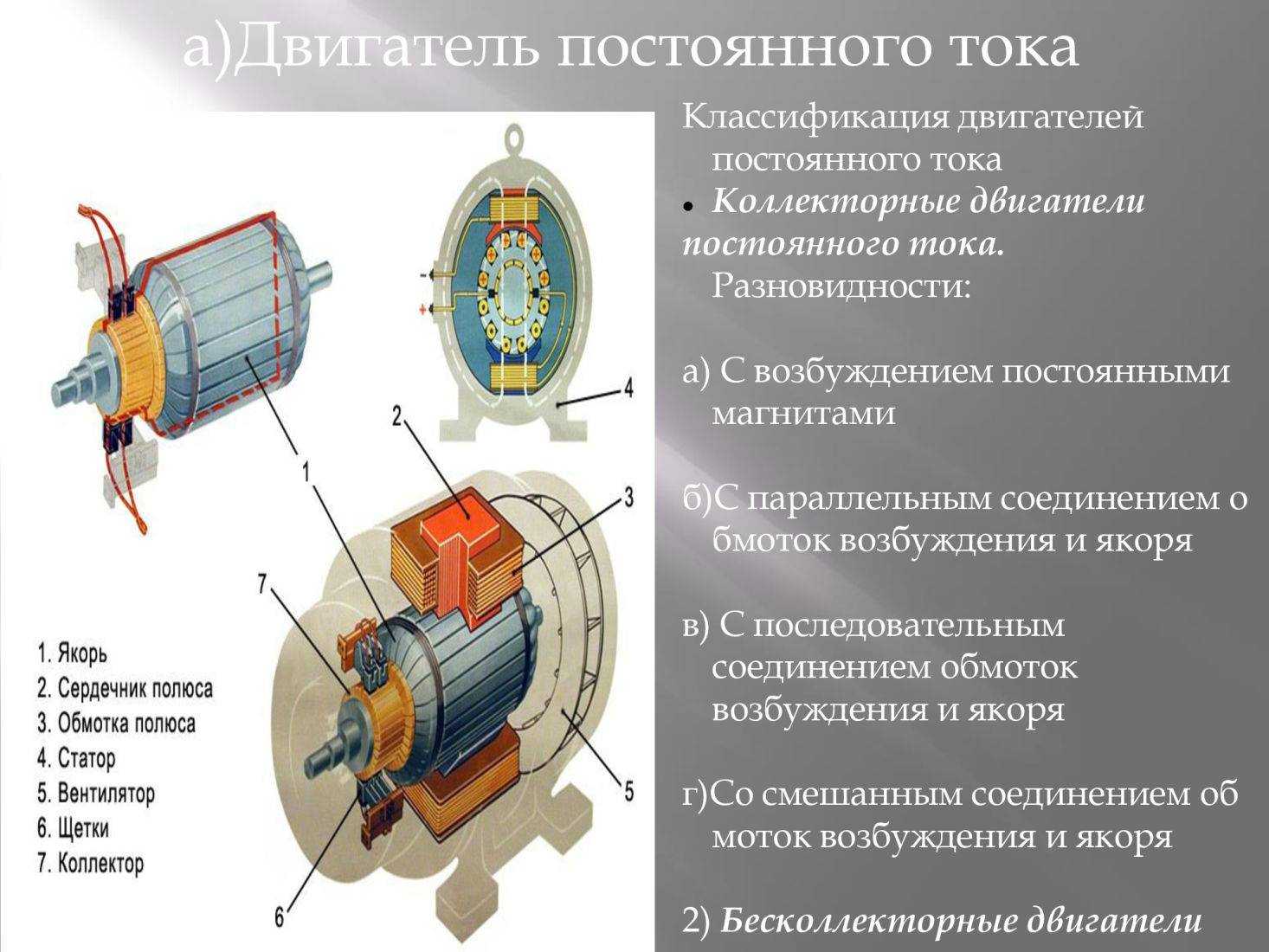
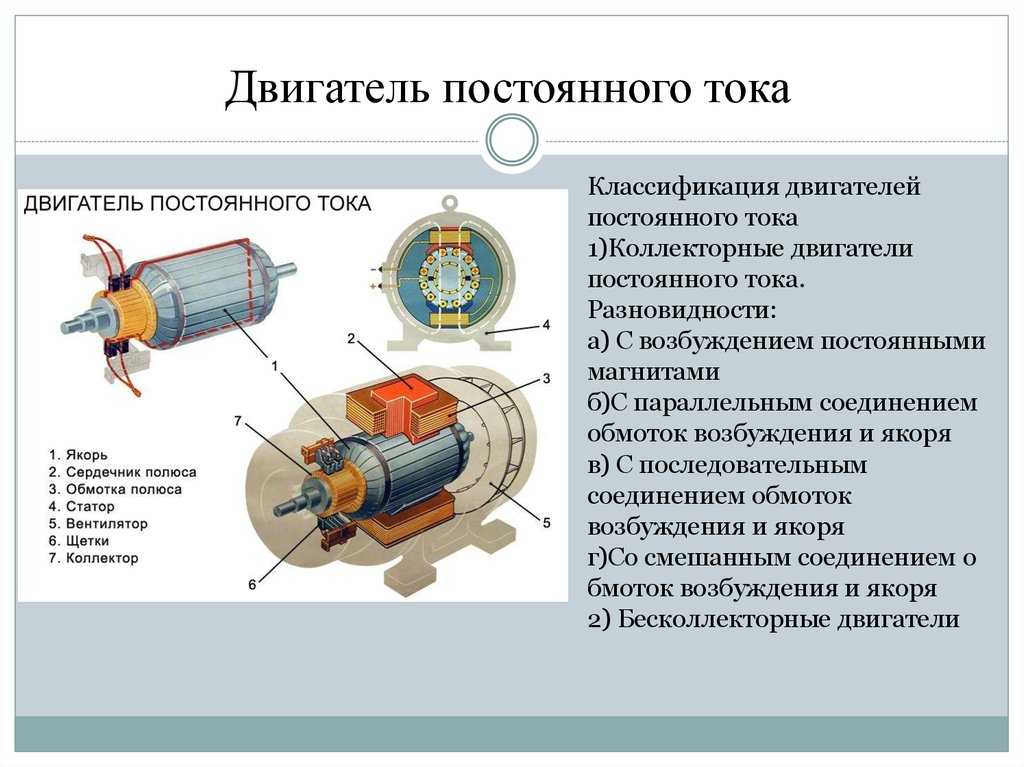
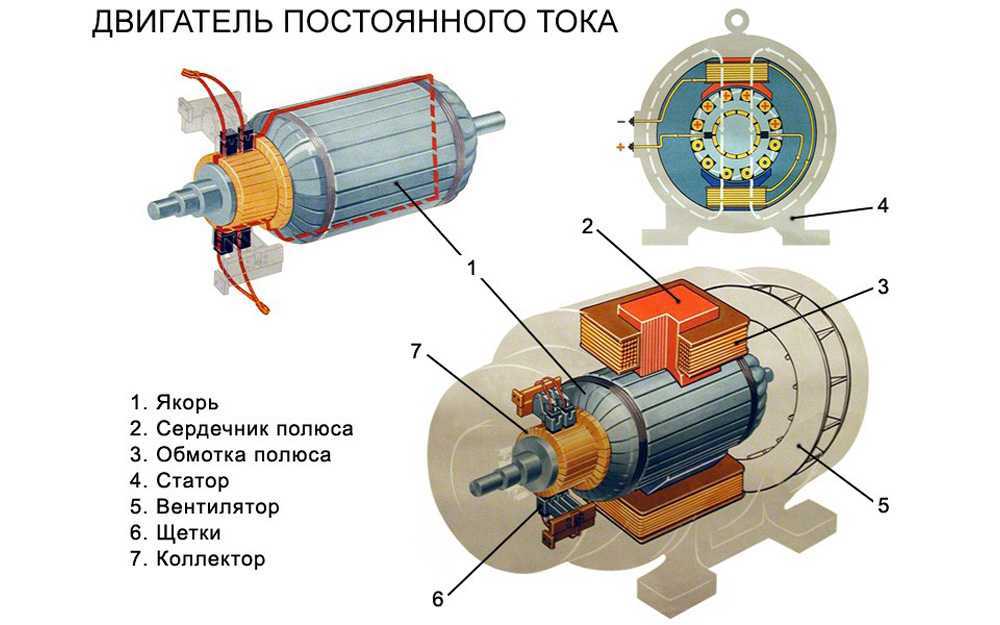
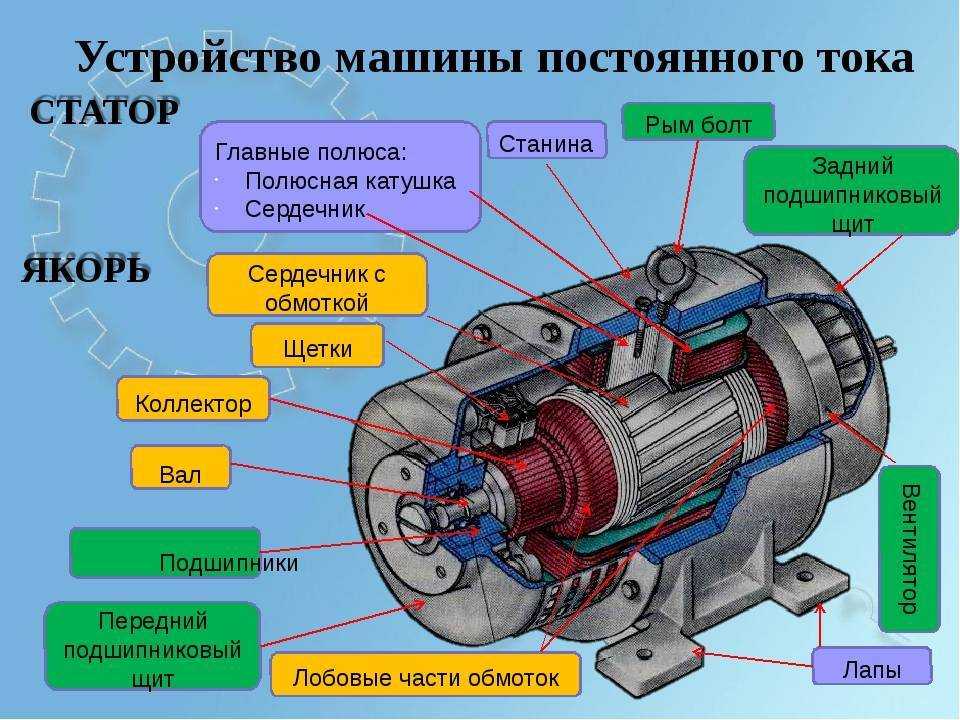
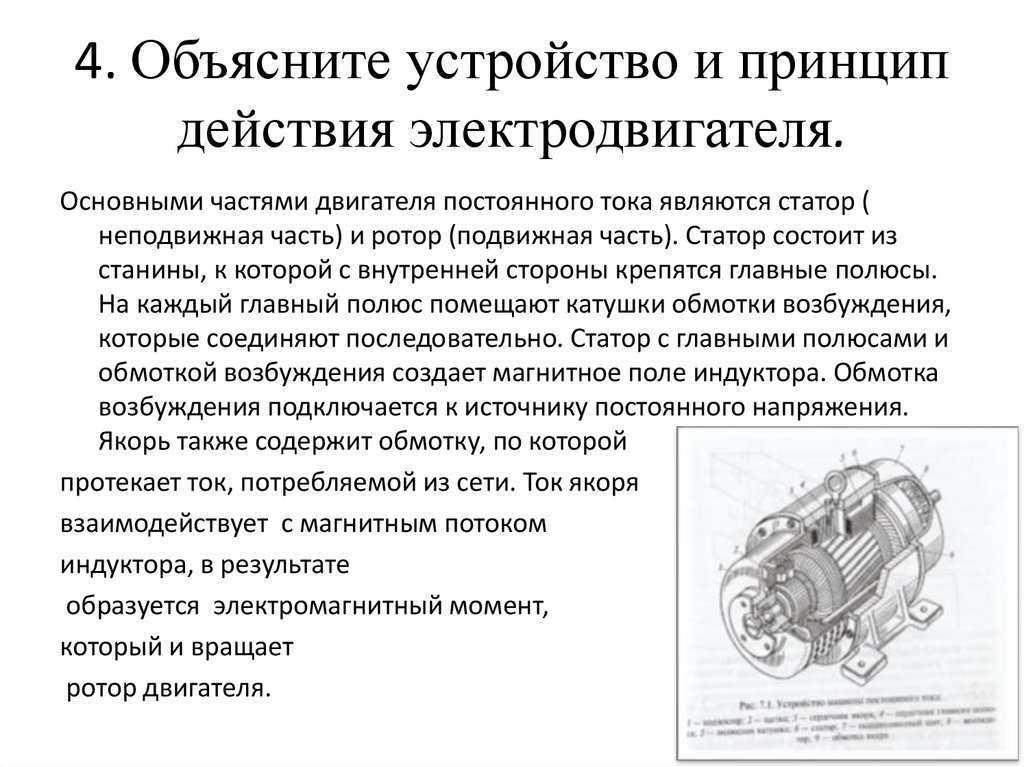
Устройство и принцип действия ДПТ
Устройство двигателя постоянного тока включает в себя:
- Якорь – подвижная часть мотора, его ротор. Визуально это пластины или вал с пазами, в которые уложен проводник;
- Статор – статическая часть, играющая роль подковообразного магнита. У статора может быть больше двух полюсов, но иллюстрировать мы будем работу двухполюсного электродвигателя (рисунок ниже);
- Коллектор – переключатель, соединяющий якорную намотку с электросхемой мотора. Необходим для изменения направления тока в проводе.
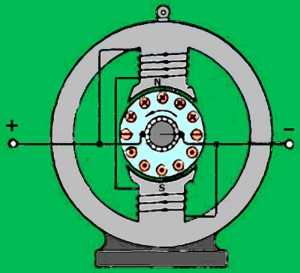
Теперь о том, как работает двигатель постоянного тока:
- По верхнему проводнику якоря пускается электроток, направленный к плоскости рисунка;
- По нижнему проводнику якоря электроток направляется к нам от рисунка;
- Верхние провода по правилу левой руки под действием силы Ампера движутся вправо;
- Нижние провода согласно тому же правилу направляются влево. Но поскольку провода уложены в пазы вала, объединяющего все намотки в единую систему, в движение приводится якорь целиком;
- Когда намотка, в которой электроток движется к плоскости схемы, достигнет нижнего положения, по правилу левой руки она будет толкать якорь влево. Поэтому движение вала будет тормозиться;
- Двигатели созданы для продолжительной работы, поэтому нельзя допустить торможения якоря. Для этого направление течения электротока нужно поменять в момент пересечения мертвой точки. Для этой цели и применяется коллектор.
Подключение через микросхему Arduino
Двигатели малой мощности также можно запускать с помощью специальных функциональных платформ. Таким распространенным сейчас способом является подключения моторчика постоянного тока к Ардуино. Напрямую через Arduino подключение лучше не делать, поскольку велика вероятность повредить микросхему. Рекомендуется использовать Н-мост или транзисторы. Такая технология внедрения электромоторов в функциональные контуры предоставляет много возможностей для управления и приведения в движение рабочих частей электромашин, современных транспортных средств и роботизированных механизмов. Можно контролировать не только скорость оборотов моторчика, но и направление его движения.

Прямое подсоединение к выходным портам платформы может не только вызвать их перегорание, но также сведет функциональные возможности управления электромотором к минимуму. Через каждый такой порт может подаваться ток величиной около двадцати миллиампер, а для нормальной работы даже самого компактного электрического моторчика требуется во много раз больше. Поэтому мотор нужно подключить к Ардуино последовательно через регулятор силы подаваемого тока.





Выбирая подходящий двигатель для подключения к микроконтроллеру, следует обратить внимание на следующие характеристики:
- потребляемый ток, необходимый для нормального функционирования оборудования;
- напряжение номинальное (наиболее распространенное для таких систем – 12 вольт);
- вращательный момент – чем он больше, тем мощнее агрегат;
- скорость оборотов вала электромотора;
- вес и габариты – предпочтение сейчас отдается миниатюрным моделям.
Легче всего осуществляется последовательное подключение к Ардуино стандартного щеточного электромотора постоянного тока, рассчитанного на силу тока до 5A и рабочее напряжение около 9B. Для этого часто используют транзисторную систему. Но она позволяет только контролировать скорость оборотов. Подключение к микроконтроллеру через H-мост дает возможность также регулировать и направление вращения.
Управление двигателем постоянного тока
Эксплуатация и управление двигателем постоянного тока будет сильно зависеть от размера двигателя. В этой статье речь пойдет в основном о крупных промышленных двигателях, хотя некоторые двигатели постоянного тока для хобби могут использовать те же общие элементы управления. Как и в случае с другими типами промышленных двигателей, серводвигателей или двигателей переменного тока, на рынке существуют специальные приводы для питания и управления двигателями от разных производителей.

Siemens производит свою серию приводов Sinamics DCM, которые полностью интегрированы в свое программное обеспечение для программирования TIA Portal. Allen Bradley и Rockwell Automation предлагают приводы постоянного тока PowerFlex, которые также взаимодействуют с их программным обеспечением. С этими конкретными приводами вам нужно только подключить их к сети машины, и ПЛК сможет обмениваться данными по сети. Внутри программного обеспечения для программирования предоставляются простые структуры данных для пуска, останова и изменения скорости двигателя, а также многие другие параметры управления и обратной связи, как и в случае управления двигателем с ЧРП. Эти приводные устройства могут быть довольно большими и потребуют существенного охлаждения внутри шкафа для приложений с большими токами. Обычно они монтируются на объединительной плате электрического шкафа и подключаются к коммуникационной технологии Fieldbus поставщика. На рынке также есть более простые решения, которые предлагают несетевое управление скоростью и направлением с помощью переключателей и циферблатов, а некоторые могут даже принимать аналоговые и цифровые входы для скорости и направления.
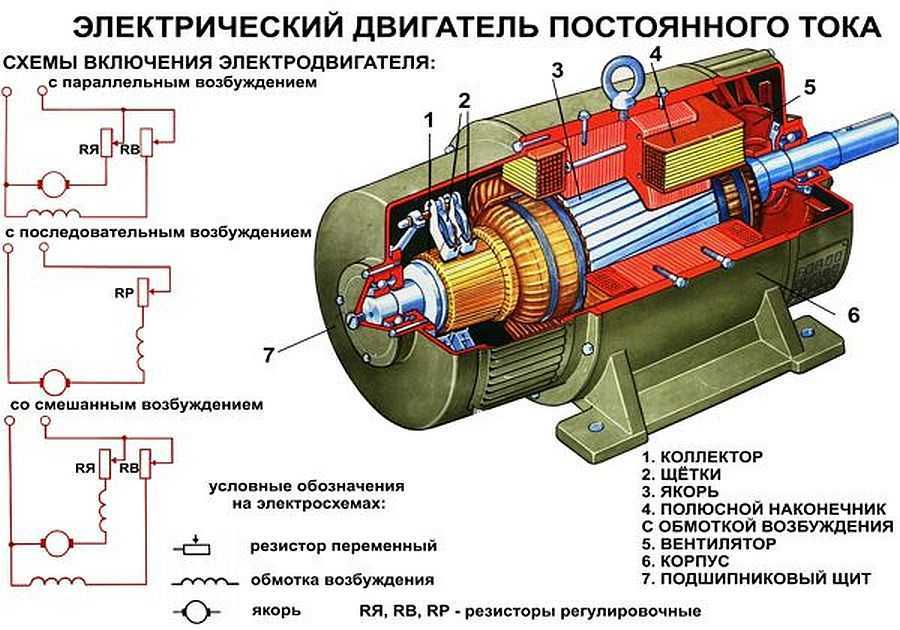
СПОСОБЫ ВОЗБУЖДЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
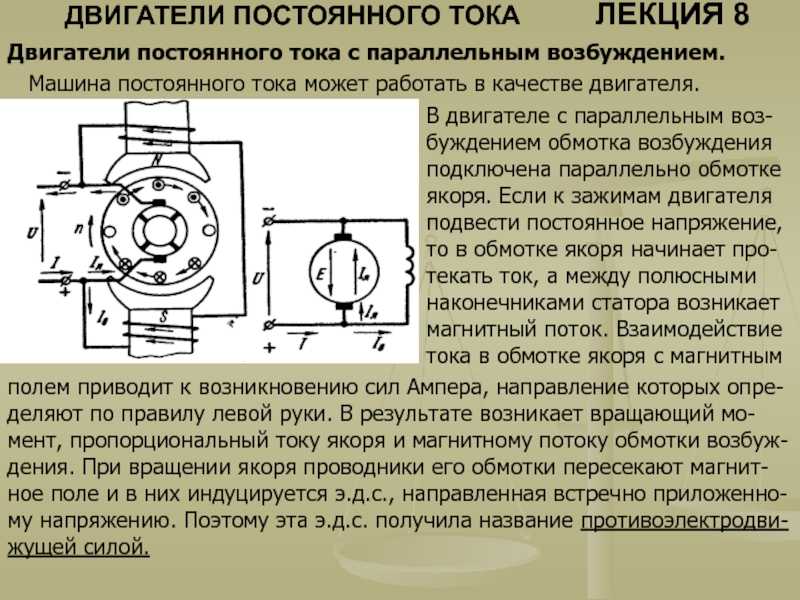
Под возбуждением электродвигателей постоянного тока (ПТ) понимается эффект создания в них ЭДС, обеспечивающей вращение ротора. Их рабочие характеристики зависят от того, каким образом включена обмотка возбуждения (ОВ) по отношению к цепи якоря.
Наиболее распространены следующие схемы подключения:
- с независимым возбуждением (две обмотки не связаны одна с другой, а ОВ питается от отдельного источника);
- с параллельным возбуждением или шунтируемого типа (в них ОВ включена параллельно якорной цепочке);
- с последовательным возбуждением (ОВ включается последовательно с якорной обмоткой).
В ряде случаев, связанных с особенностями эксплуатации двигателей постоянного тока, применяется комбинированная схема включения.
Иногда ее называют «смешанной» или «компаундной» (в ней последовательное подключение совмещается с параллельным). Рассмотрим каждый из перечисленных вариантов более подробно.
Независимое возбуждение.
При этой схеме подключения обмотка возбуждения электрически не связана с катушкой якоря (рис.1). Для снижения тепловых потерь и создания необходимой величины ЭДС число витков в ней делается достаточно большим, что позволяет снизить ток возбуждения.
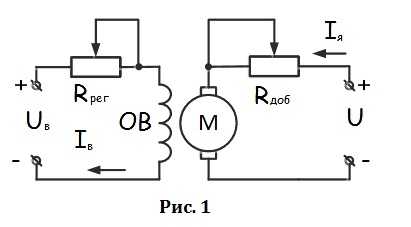
Регулировать ток в якоре можно посредством резистора Rдоб, включенного последовательно. Частоту вращения можно менять резистором Rрег. Возможность независимого управления параметрами двигателя относят к плюсам этой схемы.
Ее минус – необходимость использования дополнительного источника питания, что приводит к увеличению материальных издержек. Применение схемы с независимым возбуждением определяется особенностями конструкции управляемого электропривода.
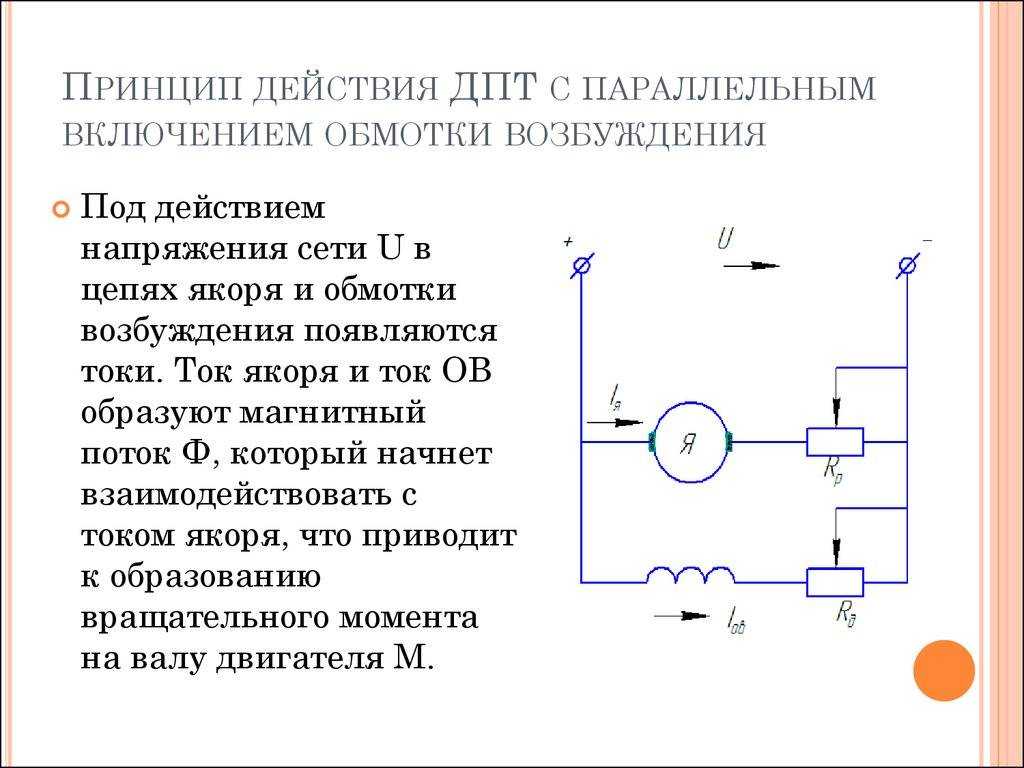
Параллельное возбуждение.
Электрическая схема подключения с параллельным возбуждением в целом напоминает рассмотренную выше. Ее особенность – наличие электрической связи ОВ с якорной цепью (рис.2).
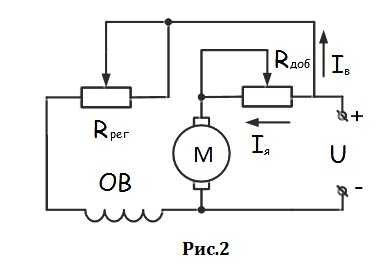
Эффективность работы двух рассмотренных схем практически одинакова. Преимущество этого способа включения в том, что в данной ситуации отпадает необходимость в дополнительном источнике питания. Ее минус – невозможность раздельной регулировки параметров электродвигателя.
Принцип работы электродвигателя с последовательным возбуждением.
Особенностью этой схемы является последовательное включение ОВ и якорной цепочки (рис.3). При таком варианте подключения ток якоря является одновременно и током возбуждения (Iя =Iв). Это вынуждает производителей оборудования наматывать ОВ проводом того же сечения, что и у якоря.
Недостаток этой схемы – в том, что скорость двигателя зависит от нагрузки на валу. При ее увеличении падение напряжения на обмотках и магнитный поток возрастают. А это приводит к сильному падению скорости вращения. При снижении нагрузки частота вращения двигателя резко возрастает и может достичь опасных значений (он может начать работать «вразнос»).
Данный вариант применяют в случаях, когда необходимо выдерживать большое пусковое усилие (момент). Или же когда двигателю предстоит работать в режиме кратковременных перегрузок. Схемы с последовательным запуском используются в тяговых двигателях (в метро, трамваях, электровозах и троллейбусах).
Принцип действия двигателя со смешанным возбуждением.
К каждому из полюсов системы со смешанным возбуждением подключено две обмотки: последовательная и параллельная (рис.4). Их допускается включать таким образом, чтобы магнитные потоки суммировались (согласное подключение), либо вычитались один из другого (встречное включение).
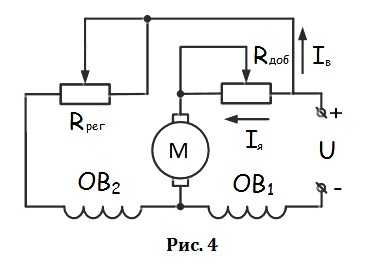
В зависимости от того, как соотносятся части каждого из магнитных потоков, двигатель постоянного тока со смешанным возбуждением приближаются по своим свойствам к одному из уже рассмотренных ранее вариантов.
Такие схемы применяются в ситуациях, когда необходим большой по величине пусковой момент и одновременно невозможно обойтись без регулировки частоты вращения вала при переменных нагрузках.
Где используются двигатели постоянного тока?
Характеристики крутящего момента на низких скоростях делают двигатели постоянного тока идеальными для перемещения тяжелых грузов на относительно низких скоростях, таких как мостовые краны, лифты или любое технологическое оборудование с большой массой, для ускорения которого требуется огромное усилие. Для вентиляторов и насосов требуется возможность быстрой и простой регулировки скорости, как и для двигателей в электромобилях, и двигатель постоянного тока может легко выполнить это требование.

Следует также отметить, что конструкции оригинального оборудования также могут использовать преимущества характеристик двигателя. Для этих низкоскоростных приложений также можно использовать высокоскоростной двигатель в сочетании с цепным или зубчатым приводом для снижения выходной скорости и увеличения крутящего момента. По этой причине практически невозможно заявить, что какой-либо двигатель «должен» или «не должен» использоваться в определенных приложениях.



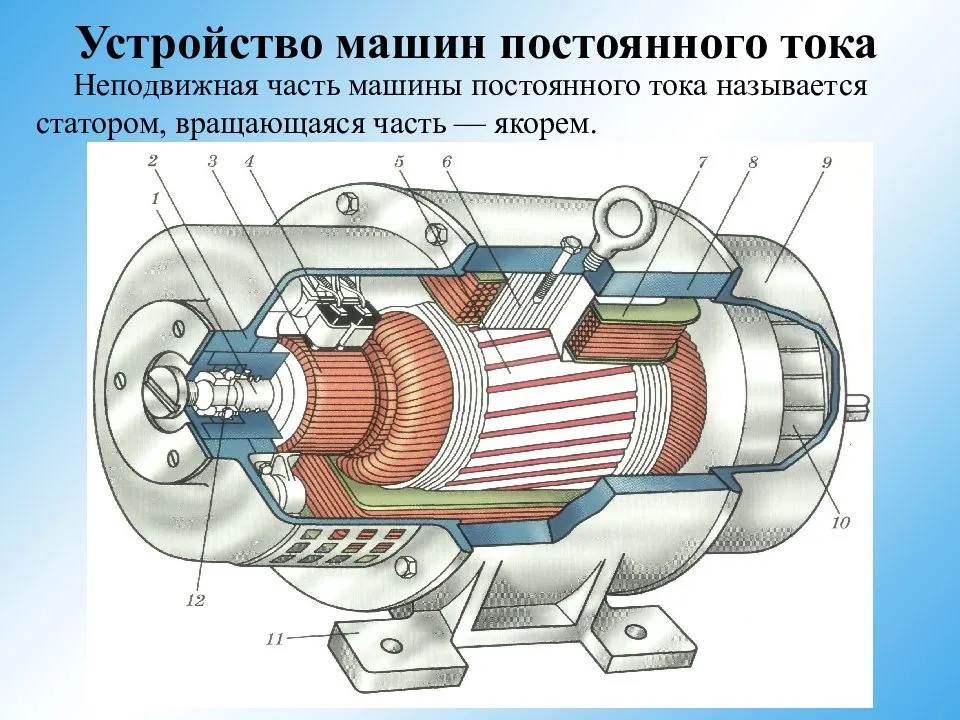


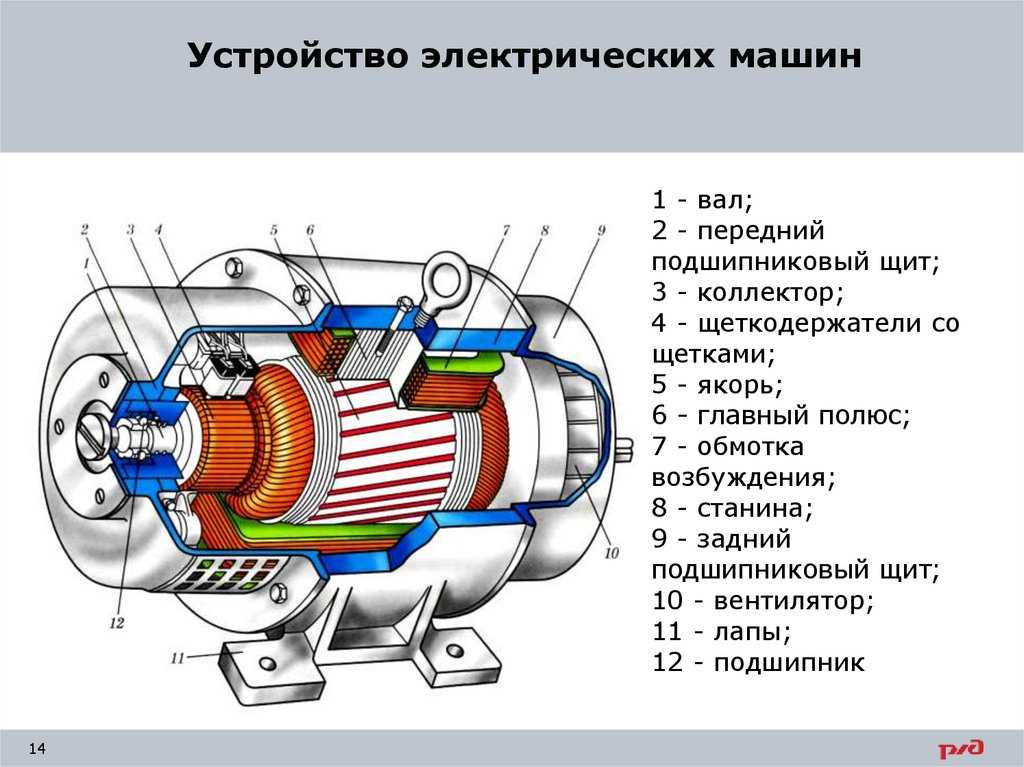
Как устроен классический электродвигатель
Каждый такой агрегат по своей сути является своеобразной технико-механической системой, с основной функцией, направленной на трансформацию электрической энергии во вращательное движение вала. Физическое действие двигателей основано на всем известном явлении электромагнитной индукции. В состав электромотора входят статор и ротор, которые соответственно являются неподвижной и движущейся частью.
В стандартных двигателях статор служит их наружной оболочкой, где происходит формирование неподвижных полей, обладающих магнитными свойствами. Роторная конструкция помещается внутри статора. Она включает в себя определенное число постоянных магнитов, сердечник в виде обмоток из проволоки, коллектор и щетки. Ток проходит по этим обмоткам, изготовленным из проводников, расположенных в виде многочисленных витков. Когда электрический мотор, в том числе и с короткозамкнутым ротором, присоединяется к источнику питания, статорные и роторные поля начинают взаимодействовать между собой. Это приводит к возникновению момента вращения, вызывающего движение роторного вала агрегата. В свою очередь, энергия вращающегося вала подается к рабочему органу всего технического устройства, составной частью которого является тот или иной двигатель.
Когда электрический мотор, в том числе и с короткозамкнутым ротором, присоединяется к источнику питания, статорные и роторные поля начинают взаимодействовать между собой. Это приводит к возникновению момента вращения, вызывающего движение роторного вала агрегата. В свою очередь, энергия вращающегося вала подается к рабочему органу всего технического устройства, составной частью которого является тот или иной двигатель.
В процессе преобразования электричества в механическое движение, возникают определенные энергетические потери. Это связано с силой трения, намагничиванием сердечников, нагревом проводниковых элементов и другими факторами. На КПД электродвигателя оказывает влияние даже сопротивление воздуха деталям, находящимся в движении.
Тем не менее, благодаря современным технологиям, коэффициент полезного действия агрегатов нового поколения может доходить до 90%. Кроме того, эти устройства отличаются экологической чистотой и высокими эксплуатационными характеристиками.
Модель ДПТ
Из теоретических основ видно, что для электродвигателя присутствие постоянного магнитного поля обязательно. Для этого в маломощных ДПТ применяют постоянные магниты. Для средне- и высокомощных агрегатов требовались бы очень громоздкие магниты, поэтому их заменяют обмоткой возбуждения, иногда – индуктором. По ним пропускают ток, и они формируют магнитное поле.
Элеентарная модель ДТП – это однородное магнитное поле, внутрь которого поставлена рамка. По ней пускают ток. Сначала она оборачивается, а достигнув положения «горизонтально» – останавливается. Такое положение называют мертвой точкой. Останавливается рамка потому, что по одной стороне ток течет в одну сторону, а с другой – в противоположную. Это значит, что они образуют взаимообратные поля. Они возмещают действия друг друга, и движение прекращается. Чтобы оно было бесконечным, необходима еще одна рамка, сцепленная с первой. Тогда всегда какая-то из двух рамок будет создавать разнородность в поле, которая будет заставлять двигаться рамочную систему целиком.
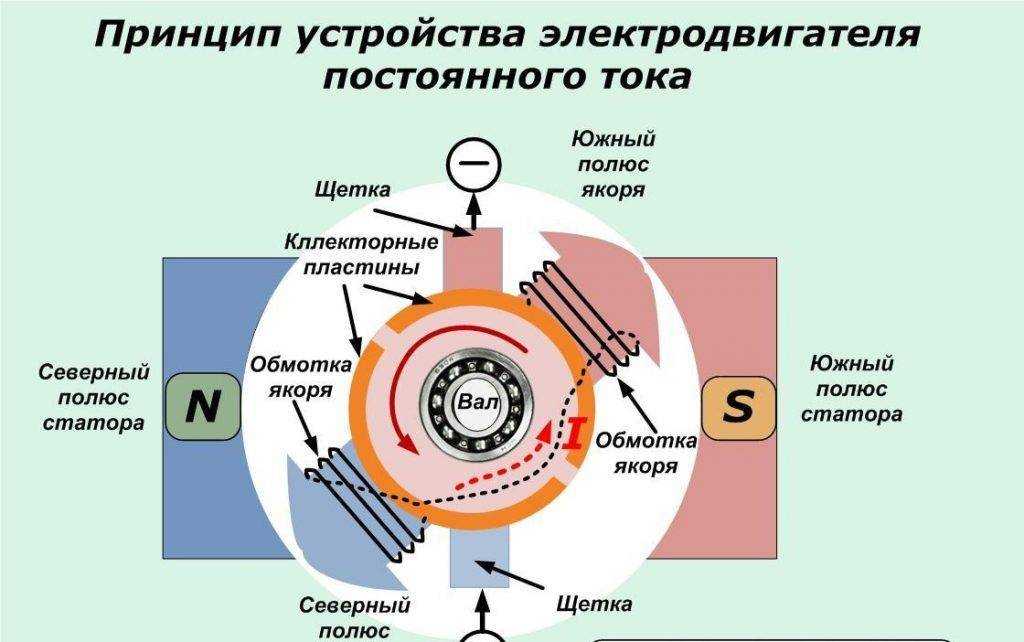
Принцип действия ДПТ
ДПТ, как и любой современный мотор, работает на основе «Правила левой руки», с которым все знакомы еще со школы и закона Фарадея. При подключении тока к нижней обмотке якоря в одном направлении, а к обмотке верхней – в другом, якорь начинает вращаться, а уложенные в его пазах проводники – выталкиваться магнитным полем статора или обмоток корпуса двигателя постоянного тока. Вправо выталкивается нижняя часть, а влево – верхняя. В результате якорь вращается до тех пор, пока его части не поменяются местами. Чтобы добиться непрерывного вращения, необходимо полярность обмотки якоря регулярно менять местами. Как раз этим и занимается коллектор, коммутирующий при вращении обмотки якоря. На коллектор от источника подается напряжение через пару прижимных щеток из графита.
Разновидности ДПТ
Двигатели ПТ делят на четыре группы:
-
Коллекторные. Их классифицируют по подтипам:
- С одним коллектором и четным числом намоток;
- С парой коллекторов и двумя обмотками;
- С тремя коллекторами и таким же числом намоток;
- С четырьмя коллекторами и двумя намотками;
- С четырьмя коллекторами и таким же числом обмоток на якоре;
- С восемью коллекторами и безрамочным якорем.
Это тип электродвигателя, описанный выше. Его преимущества – отличный запуск, нет затруднений в реверсировании и регулировании частоты вращения мотора. К достоинству также относят простое устройство и легкое управление. Недостаток только один – уж очень быстро изнашивается коллектор. А это не самый дешевый элемент двигателя.
- Инверторные.
Инверторный ДПТ имеет те же преимущества, что и коллекторный. Отличие состоит лишь в том, что переключение производится электронным путем за счет передачи информации датчиком положения ротора. Поэтому мотор обретает дополнительное достоинство – отсутствие изнашиваемых элементов, что делает двигатель более экономичным.
- Униполярный ДПТ.
В основе принципа действия такого двигателя – все то же влияние магнитного поля на проводник с током. Но в поле помещается не проволочная намотка, а диск на оси. Ток подается так: один контакт соединен с осью диска, а другой – с его краем.
- Универсальный коллекторный ДПТ.
Устройство и принцип действия аналогичен коллекторному электродвигателю постоянного тока. Отличие содержится в том, что питать якорную намотку можно от источника, как постоянного тока, так и переменного. В сетях электроток имеет частоту 50 Гц. Значит, 50 раз в секунду токодвижение производится в одну сторону, и 50 раз – в другую. Казалось бы, якорь в таком случае с такой же частотой должен вращаться то в одну, то в другую сторону. Но этого не происходит, потому что общая цепь мотора соединена последовательно. И если меняется ток в якоре, то и в статоре тоже. Поэтому направление вращения вала сохраняется.
Такие двигатели часто применяются для работы электрических строительных и бытовых. Они обладают тем же преимуществами и недостатками, что и коллекторные ДПТ. Но добавлено по одному плюсу и минусу. В защиту – мотор можно использовать при питании от постоянного и переменного электрического источника (простые коллекторные только от постоянного). В минус – КПД ниже.
Сегодня на практике используется большое многообразие электродвигателей постоянного тока. Их устройство может незначительно отличаться друг от друга. Но чего у ДПТ не отнять, так это то, что они всегда работают на взаимодействии двух магнитных полей: ротора и статора. А благодаря возможности изменения конструкции такие моторы можно приспособить практически для любых нужд.