
Объяснение программы для Arduino
Полный код программы приведен в конце статьи, здесь же мы рассмотрим только его основные фрагменты.
Для управления BLDC двигателем мы будем формировать ШИМ сигнал с частотой 50 Гц и изменяемым от 0 до 100% коэффициентом заполнения. Значение коэффициента заполнения будет управляться с помощью потенциометра. То есть, вращая потенциометр, мы будем управлять скоростью вращения двигателя. Как уже указывалось, управление BLDC двигателем очень похоже на управление сервомотором с помощью ШИМ 50 Гц, поэтому в данном случае мы будем использовать ту же самую библиотеку, которую использовали для управления сервомотором. Если вы начинающий в изучении платформы Arduino, то перед дальнейшим прочтением данной статьи рекомендуем вам изучить принципы формирования ШИМ сигнала в Arduino и подключение сервомотора к плате Arduino.
ШИМ сигнал можно генерировать только на тех цифровых контактах платы Arduino, которые обозначены символом ~. В нашей схеме мы будем управлять контроллером ESC с контакта 9 платы Arduino, поэтому следующей командой мы прикрепим контроллер ESC к этому контакту:
Arduino
ESC.attach(9);
| 1 | ESC.attach(9); |
Коэффициент заполнения ШИМ (от 0 до 100%) управляется с помощью положения ручки потенциометра. То есть когда на выходе потенциометра у нас будет 0V (0 на выходе АЦП), у нас коэффициент заполнения будет равен 0, а когда на выходе потенциометра будет 5V (1023 на выходе АЦП), коэффициент заполнения ШИМ будет равен 100%. Поэтому мы будем использовать функцию, которая будет считывать значение с выхода АЦП контакта A0.
Arduino
int throttle = analogRead(A0);
| 1 | intthrottle=analogRead(A0); |
Затем мы должны конвертировать полученное значение (оно будет в диапазоне от 0 до 1023) в диапазон от 0 до 180. В дальнейшем значение 0 у нас будет означать 0% коэффициент заполнения ШИМ, а значение 180 – 100% коэффициент заполнения ШИМ. Конвертация значения из диапазона 0-1023 в диапазон 0-180 будет осуществляться с помощью функции:
Arduino
throttle = map(throttle, 0, 1023, 0, 180);
| 1 | throttle=map(throttle,,1023,,180); |
В дальнейшем мы должны передать это значение в функцию управления двигателем, чтобы сформировать соответствующий ШИМ сигнал на необходимом нам контакте. Поскольку мы дали нашему серво объекту имя ESC, то команда для управления им будет выглядеть следующим образом:
Arduino
ESC.write(throttle);
| 1 | ESC.write(throttle); |
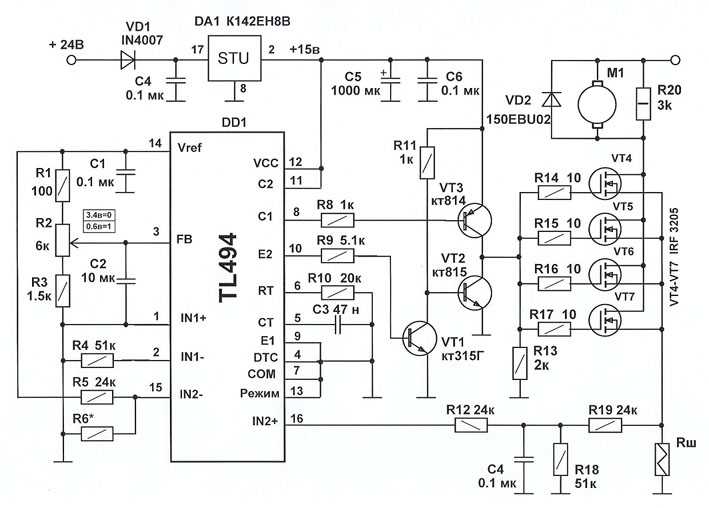
ШИМ сигнал в H-мосте
Рассмотрим нашу схему с точки зрения
нагрева транзисторов. Это один из
основных критериев, по которому наш
прибор может выйти из строя. Полевой
транзистор состоит из двух элементов
— собственно транзистор и паразитный
диод. В схеме управления мотором оба
элемента работают. Нагрев полевого
транзистора происходит в следующие
моменты времени:
-
когда транзистор открыт, нагрев
идёт из-за сопротивления в открытом
состоянии Rdson, пропорционально времени
открытия транзистора выделяется
мощность P = I * I * Rdson -
когда транзистор закрыт, то ток ЭДС
мотора идёт через диод, то есть нагрев
идет из-за диода P = I * U diode forward (как
правило 1В) -
когда транзистор переключается из
открытого состояния в закрытое, то
нагрев пропорционален времени открытия
и закрытия транзистора
Посмотрим, как влияет схема управления
на нагрев нашим электронных ключей.
Допустим, что мы управляем мотором ШИМ
сигналом со скважностью 50% и мотор
крутится в одну сторону. Самый простой вариант — применить
ШИМ сигнал к одному из двух транзисторов,
а второй оставить все время открытым.
Обычно, ШИМ в этом случае подаётся на
нижний транзистор (N типа), который обычно
быстрее
В этом случае нагрев нижнего
будет больше верхнего на величину тепла
выделяемого при переключениях транзистора.
Чтобы сравнять счёт, можно попеременно
подавать ШИМ сигнал то на верхний (если
они одинаковые), то на нижний транзистор.
Также можно подавать ШИМ на оба транзистора
одновременно, но из-за разницы в
транзисторах это будет не эффективно,
а также будет увеличивать нагрев за
счёт переключения транзисторов. При
такой схеме управления, два других
транзистора работают как диоды. К
счастью, наибольший ток через диод будет
при наибольшей скважности ШИМ, при этом
диод будет задействован очень малое
время
Самый простой вариант — применить
ШИМ сигнал к одному из двух транзисторов,
а второй оставить все время открытым.
Обычно, ШИМ в этом случае подаётся на
нижний транзистор (N типа), который обычно
быстрее. В этом случае нагрев нижнего
будет больше верхнего на величину тепла
выделяемого при переключениях транзистора.
Чтобы сравнять счёт, можно попеременно
подавать ШИМ сигнал то на верхний (если
они одинаковые), то на нижний транзистор.
Также можно подавать ШИМ на оба транзистора
одновременно, но из-за разницы в
транзисторах это будет не эффективно,
а также будет увеличивать нагрев за
счёт переключения транзисторов. При
такой схеме управления, два других
транзистора работают как диоды
К
счастью, наибольший ток через диод будет
при наибольшей скважности ШИМ, при этом
диод будет задействован очень малое
время
Для исключения тока через диоды,
которые дают существенный нагрев, можно
мотор никогда не отключать от напряжения,
а вместо этого, крутить его в обратную
сторону. Таким образом, мы должны,
например 70% ШИМ сигнала крутить вправо,
а 30% влево. Это даст в итоге 70%-30%=40% скорости
вправо. Но при этом не будут задействованы
диоды. Такой метод управления называется
комплиментарным. Такая схема требует
большого конденсатора на линии питания,
а также источника питания, который может
потреблять ток (например аккумулятора).
Вместо вращения мотора в разные
стороны, можно помогать диодам — а
именно тормозить мотор, открывать два
верхних транзистора в момент низкого
уровня ШИМ сигнала. На практике, все эти
методы не дают существенного изменения
скорости вращения двигателя, но позволяют
эффективно управлять нагревом полевых
транзисторов. Более подробно про
особенности различных схем управления
можно в этой статье.
На этом мы закончим нашу статью про
моторы. Теперь можно перейти к практике
— будем делать плату
управления 4-мя
моторами
для робота.
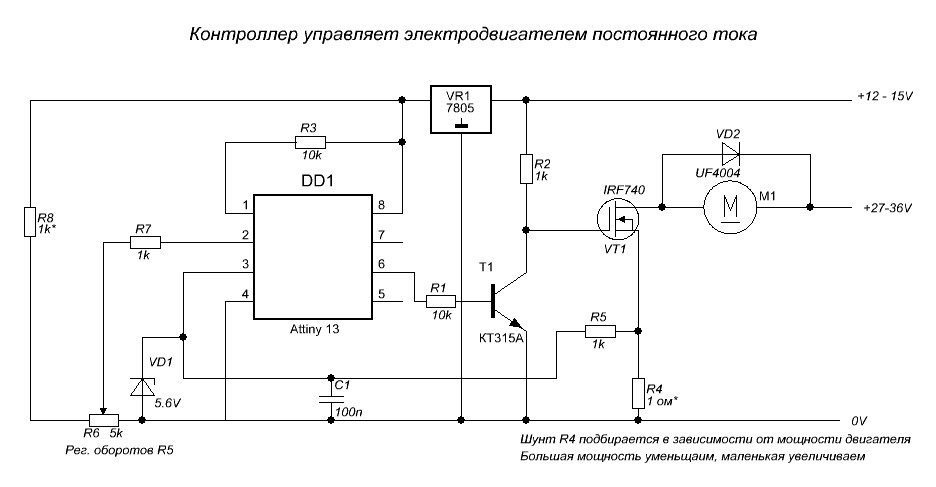
Управление двигателем при помощи MOSFET транзистора
Так же можно управлять постоянным двигателем с помощью полевого транзистора MOSFET:
Он должен быть с каналом обогащенного типа. Основным преимуществом такого транзистора является практически отсутствие входного тока. Он имеет небольшое активное сопротивление канала (доли ома), благодаря чему потери мощности в транзисторе не большие. Недостатком является чувствительность к электростатическим разрядам, которые могут вывести транзистор из строя.
Так как ток стока может достигать (для среднего транзистора) десятков ампер и, имея практически нулевой входной ток, MOSFET транзисторы отлично подходят в качестве усилителя мощности и часто являются лучшей альтернативой, чем биполярные. Они так же должны быть защищены диодами от индуктивных всплесков, так как это может привести к пробою между затвором и каналом (напряжение пробоя составляет несколько десятков вольт).
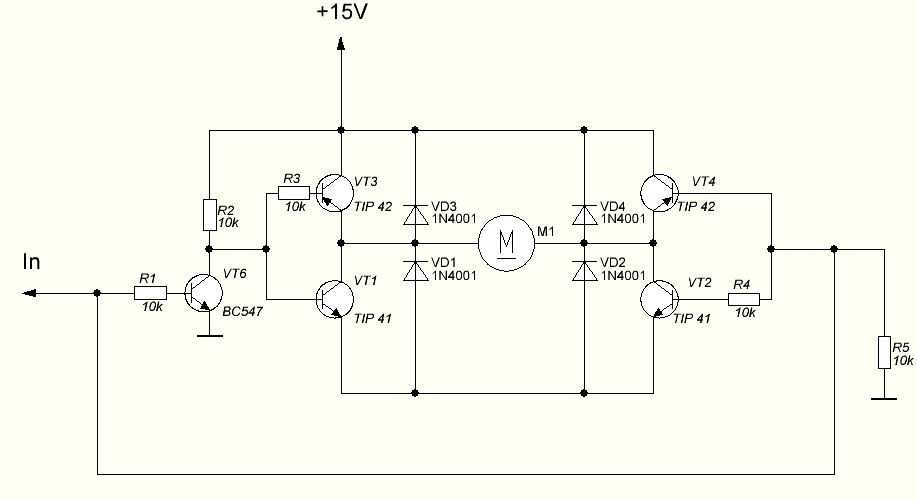

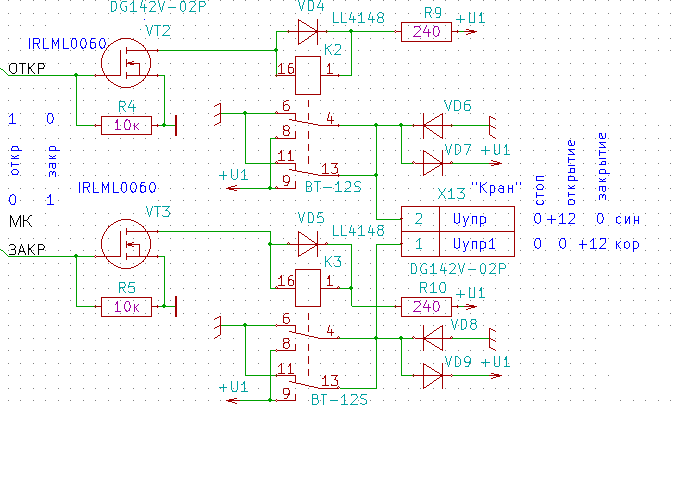
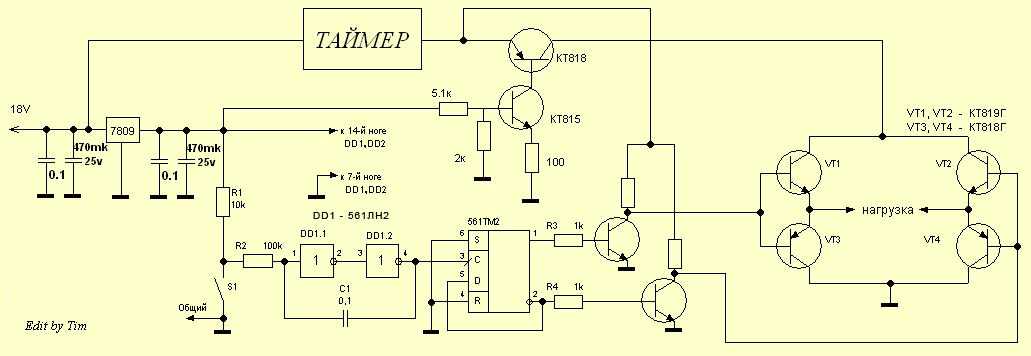
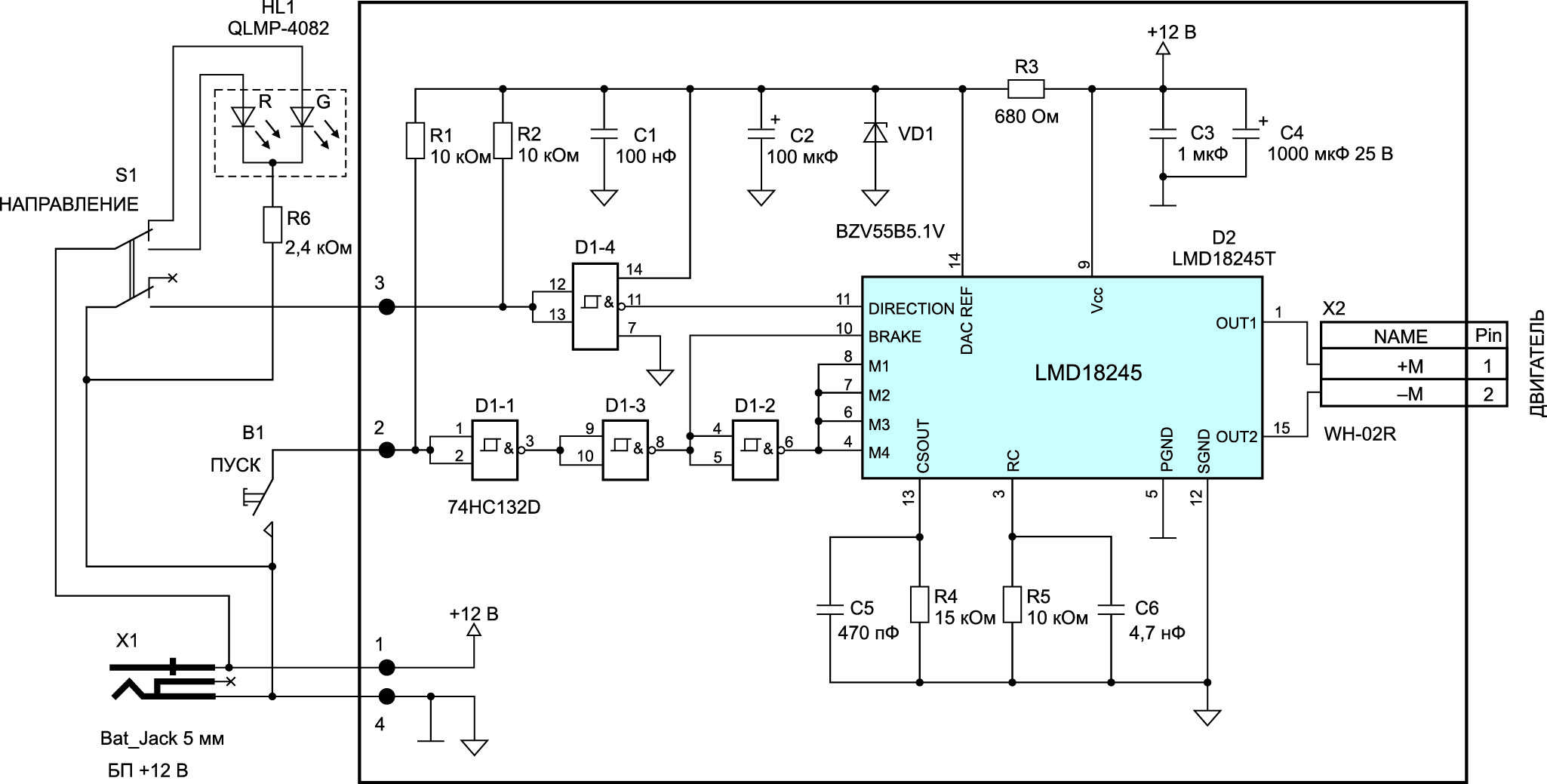
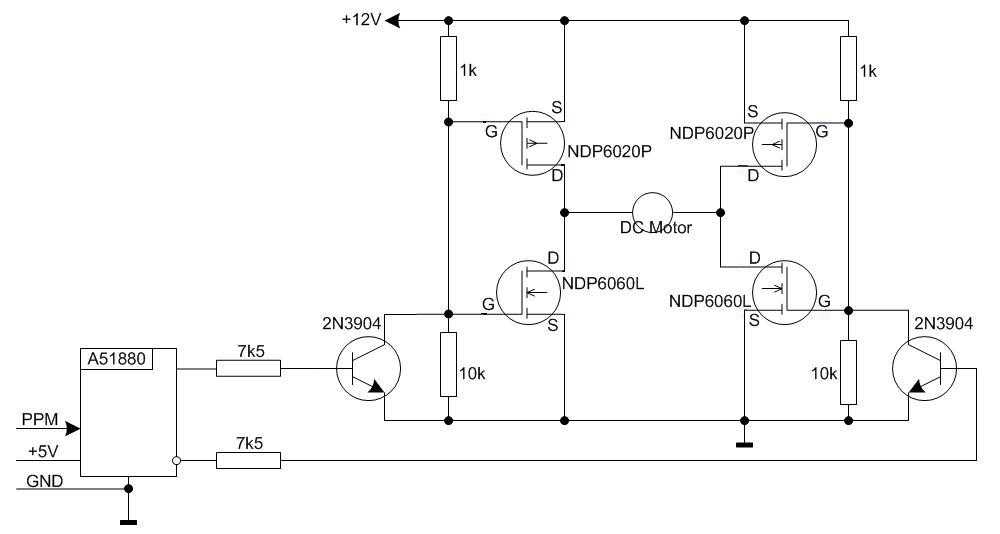
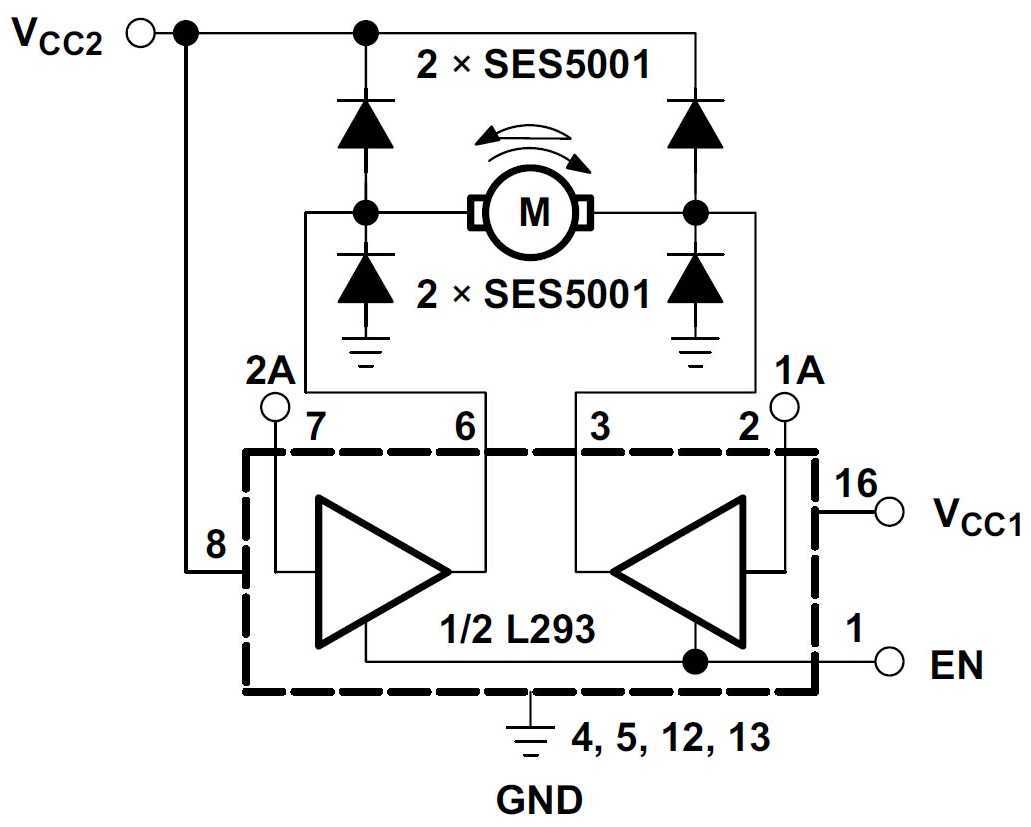

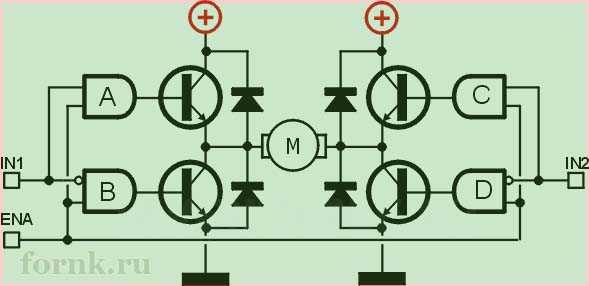
Схема реверса электродвигателя на ардуино
В конструировании моделей или робототехнике часто применяются небольшие щеточные электродвигатели постоянного тока, для управления которыми используется программируемый микроконтроллер ардуино.
Если вращение двигателя предполагается только в одну сторону, и мощность электродвигателя небольшая, а напряжение питания от 3,3 до 5 вольт, то схему можно упростить и запитать непосредственно от ардуино, но так делают редко.
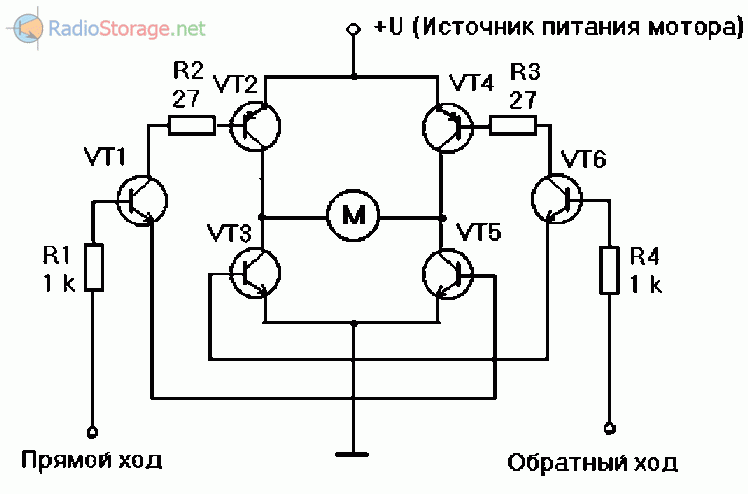
В моделях с дистанционным управлением, где необходимо использовать реверс моторов с напряжением более 5В, применяют ключи, собранные по мостовой схеме. В этом случае схема подключения двигателя с реверсом на ардуино будет выглядеть подобно тому что изображено ниже. Такое включение применяется чаще всего.
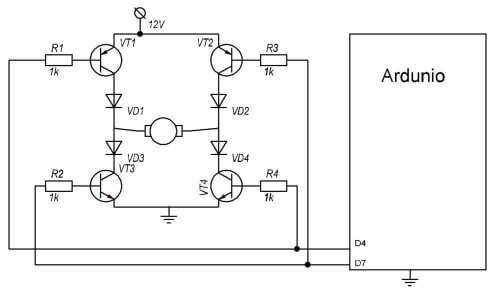
В мостовой схеме могут применяться полевые транзисторы или специальное согласующее устройство — драйвер, с помощью которого подключаются мощные моторчики.
В заключение отметим, что собирать схему реверса электродвигателя должен подготовленный специалист. Однако, при самостоятельном подключении необходимо соблюдать условия техники безопасности, выбрать подходящую схему соединения и подобрать необходимые комплектующие, строго следуя инструкции по монтажу. В этом случае у конструктора не возникнет трудностей в подключении и эксплуатации электродвигателя.
Теперь вы знаете, что такое реверс электродвигателя и какие схемы подключения для этого используют. Надеемся, предоставленная информация была для вас полезной и интересной!
Двигатель постоянного тока
Для начала рассмотрим повнимательней
обычный двигатель
постоянного тока. Любой двигатель
имеет две основные части — ротор и статор.
В коллекторном двигателе статор —
неподвижная часть, состоит из постоянных
магнитов (или в более мощных двигателях
электромагнитов). Ротор (якорь) —
вращается, совмещён с валом двигателя
и состоит из многих катушек (как минимум
трех). Коллектор (щёточно-коллекторный
узел) отвечает за переключение выводов
катушек ротора. Ток в таком двигателе
подводится к катушкам ротора через
скользящие контакты (или щётки). В один
момент времени подключена только одна
катушка, она и создаёт момент вращения
двигателя за счет проходящего тока.
С точки зрения базовых элементов
схемотехники любой двигатель можно
представить в виде следующей эквивалентной
схемы:
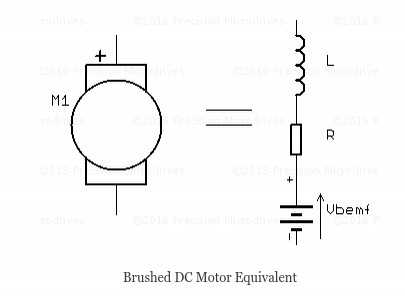
Когда мотор подключён источнику
постоянного тока и еще не начал вращаться,
то он представляет из себя обычное
сопротивление. То есть через него течет
ток согласно закону Ома и сопротивлению
его обмотки. Преобладает компонента R.
Индуктивность начинает влиять когда
напряжение не постоянное, например,
если мотор питается от ШИМ (PWM) сигнала.
Сопротивление ротора и индуктивность,
как правило, очень малы. Его можно
померить обычным мультиметром. Небольшие
модельные моторы имеют сопротивление
1-10 Ом. Поэтому, при старте мотора (когда
он ещё не начал вращаться), ток сильно
превышает рабочий ток мотора и если
мотор долго будет неподвижен (его
заклинило), то такой высокий ток может
привести к перегреву мотора и выходу
из строя.
Индуктивность катушек ротора пытается
поддерживать ток протекающий через
обмотки постоянным. Ее влияние заметно
только когда напряжение меняется. Когда
мотор начинает вращаться, то коллектор
начинает переключать катушки ротора,
что вызывает изменение напряжения.
Индуктивность пытается в эти моменты
поддерживать ток протекающий через
мотор на постоянном уровне за счет
напряжения.
Во время вращения катушки ротора
начинают вырабатывать ток (как генератор)
— возникает обратная ЭДС. Чем быстрее
вращается ротор, тем выше обратная ЭДС
возникающая в катушках, а так как она
направлена против напряжения питания,
то ток потребляемый мотором снижается.
В дальнейшем нам понадобятся следующие
выводы:
-
пока мотор не начал вращаться он
является сопротивлением -
если приложить к мотору изменяющееся
напряжение (например PWM), то индуктивность
будет иметь большое влияние, она будет
сопротивляться изменению тока через
мотор -
когда мотор вращается, то он является
генератором, и за счет этого потребляемый
ток снижается (итоговое напряжение
равно V — Vbemf).
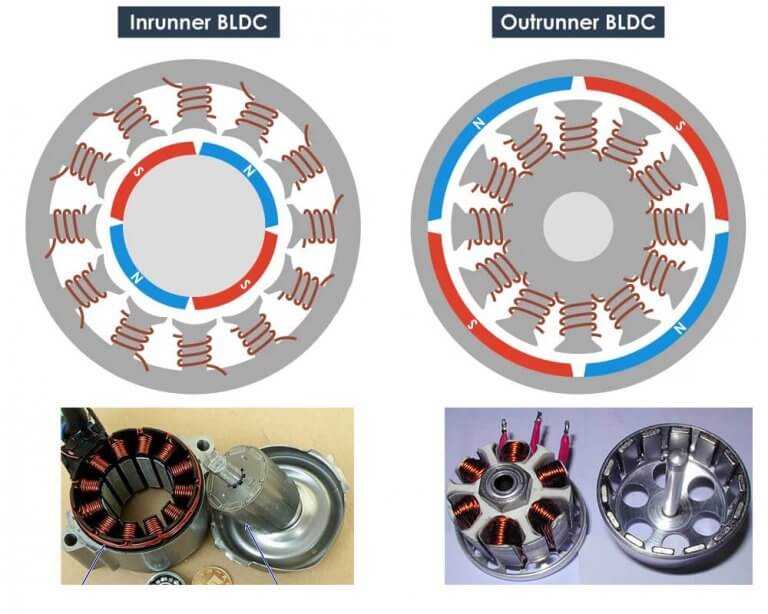
Принцип действия BLDC двигателей
Бесколлекторные электродвигатели постоянного тока (BLDC двигатели) в настоящее время часто используются в потолочных вентиляторах и электрических движущихся транспортных средствах благодаря их плавному вращению. В отличие от других электродвигателей постоянного тока BLDC двигатели подключаются с помощью трех проводов, выходящих из них, при этом каждый провод образует свою собственную фазу, то есть получаем трехфазный мотор.
Хотя BLDC относятся к двигателям постоянного тока они управляются с помощью последовательности импульсов. Для преобразования напряжения постоянного тока в последовательность импульсов и распределения их по трем проводникам используется контроллер ESC (Electronic speed controller). В любой момент времени питание подается только на две фазы, то есть электрический ток заходит в двигатель через одну фазу, и покидает его через другую. Во время этого процесса запитывается катушка внутри двигателя, что приводит к тому, что магниты выравниваются по отношению к запитанной катушке. Затем контроллер ESC подает питание на другие два провода (фазы) и этот процесс смены проводов, на которые подается питание, продолжается непрерывно, что заставляет двигатель вращаться. Скорость вращения двигателя зависит от того как быстро подается энергия на катушку двигателя, а направление вращения – от порядка смены фаз, на которые поочередно подается питание.
Существуют различные типы BLDC двигателей – давайте рассмотрим основные из них. Различают Inrunner и OutRunner BLDC двигатели. В Inrunner двигателях магниты ротора находятся внутри статора с обмотками, а в OutRunner двигателях магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. То есть в Inrunner (по этому принципу конструируется большинство двигателей постоянного тока) ось внутри двигателя вращается, а оболочка остается неподвижной. А в OutRunner сам двигатель вращается вокруг оси с катушкой, которая остается неподвижной. OutRunner двигатели особенно удобны для применения в электрических велосипедах, поскольку внешняя оболочка двигателя непосредственно приводит в движение колесо велосипеда, что позволяет обойтись без механизма сцепления. К тому же OutRunner двигатели обеспечивают больший крутящий момент, что делает их также идеальным выбором для применения в электрических движущихся средствах и дронах. Поэтому и в этой статье мы будем рассматривать подключение к платы Arduino двигателя OutRunner типа.
Примечание: существует еще такой тип BLDC двигателей как бесстержневой (coreless), который находит применение в «карманных» дронах. Эти двигатели работают по несколько иным принципам, но рассмотрение принципов их работы выходит за рамки данной статьи.
BLDC двигатели с датчиками (Sensor) и без датчиков (Sensorless). Для BLDC двигателей, которые вращаются плавно, без рывков, необходима обратная связь. Поэтому контроллер ESC должен знать позиции и полюса магнитов ротора чтобы правильно запитывать статор. Эту информацию можно получить двумя способами: первый из них заключается в размещении датчика Холла внутри двигателя. Датчик Холла будет обнаруживать магнит и передавать информацию об этом в контроллер ESC. Этот тип двигателей называется Sensor BLDC (с датчиком) и он находит применение в электрических движущихся транспортных средствах. Второй метод обнаружения позиции магнитов заключается в использовании обратной ЭДС (электродвижущей силы), генерируемой катушками в то время когда магниты пересекают их. Достоинством этого метода является то, что он не требует использования каких либо дополнительных устройств (датчик Холла) – фазовый провод самостоятельно используется в качестве обратной связи благодаря наличию обратной ЭДС. Этот метод используется в двигателе, рассматриваемом в нашей статье, и именно он чаще всего применяется в дронах и других летающих устройствах.
Схема подключения коллекторного двигателя с реверсом
Чтобы осуществить реверс коллекторного двигателя, необходимо знать:
- Не на каждом коллекторном моторе можно осуществить реверс. Если на корпусе указана стрелка вращения, то его нельзя применять в реверсивных устройствах.
- Все двигатели, имеющие высокие обороты предназначены для вращения в одну сторону. Например, у электродвигателя, устанавливаемого в болгарках.
- У двигателя, который имеет небольшие обороты, вращение может осуществляться в разные стороны. Такие моторы смонтированы в электроинструментах, например, электродрелях, шуруповертах, стиральных машинах и т.п.
На рисунке представлена схема универсального коллекторного двигателя, который может работать как от постоянного, так и переменного тока.
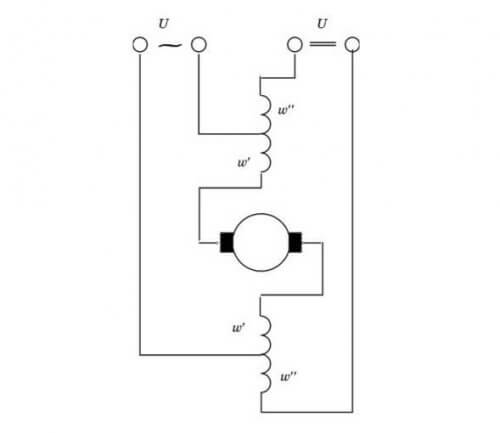
Чтобы изменилось вращение ротора, достаточно поменять полярность напряжения на обмотке ротора или статора, как и в двигателях постоянного тока, от которых универсальные машины практически не отличаются.
Если просто изменить полярность подводящего напряжения на коллекторном двигателе, направление вращения ротора не изменится. Это необходимо учитывать при подключении электродвигателя к сети.

Также следует знать, что в моторах большой мощности коммутируют обмотку якоря. При переключении обмоток статора возникает напряжение самоиндукции, которое достигает величин, способных вывести двигатель из строя.
Конструктора-любители в своих поделках применяют различные типы двигателей. Зачастую они используют щеточный электродвигатель от стиральной машинки автомат. Это удобные моторчики, которые можно подключать непосредственно к сети 220 вольт. Они не требуют дополнительных конденсаторов, а регулировку оборотов можно легко производить с помощью стандартного диммера. На клеммную колодку выводятся шесть или семь выводов.
Зависит от типа двигателя:
- Два идут на щетки коллектора.
- От таходатчика на колодку приходит пара проводов.
- Обмотки возбуждения могут иметь два или три провода. Третий служит для изменения скорости вращения.
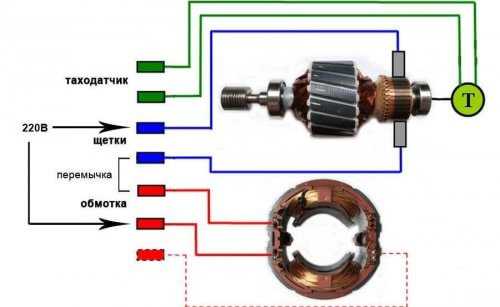
Чтобы выполнить реверс двигателя от стиральной машины, следует поменять местами выводы обмотки возбуждения. Если имеется третий вывод, то его не используют.
Сферы применения и критерии выбора регулятора оборотов
Зачастую регулятор вращения электромоторов необходим для корректной работы:
- промышленных и бытовых электрических приводов;
- электросварочных аппаратов;
- систем отопления и кондиционирования;
- электропечей;
- блоков питания компьютерной техники;
- стабилизаторов напряжения;
- стиральных и швейных машин;
- пылесосов и многого другого.
Выбирая регулятор оборотов двигателя постоянного тока, нужно обращать внимание на особенности устройства и его рекомендуемое применение:
- в электромоторах коллекторного типа чаще используются векторные регуляторы, но скалярные считаются надежнее;
- заявленная мощность контроллера должна соответствовать номинальным характеристикам силового агрегата (даже немного превышать их, чтобы обеспечить более стабильную и безопасную работу системы);
- характеристики напряжения подбираются в пределах допустимого диапазона;
- параметры преобразования частоты вращения должны отвечать техническим требованиям оборудования.
Важно также учитывать габаритные размеры, количество входов/выходов, гарантийный срок эксплуатации и прочее
Коллекторные моторы
Несмотря на то, что в процессе работы коллекторные электродвигатели 220в отличаются своей простотой, которая не требует особых усилий для управления, в процессе эксплуатации могут возникнуть особые ситуации. К ним относится, например, потребность в управлении скоростью и частотой вращения вала мотора, в том числе при работе специальном режиме регулирования крутящего момента.
Из недостатков таких силовых агрегатов стоит выделить:
- малый крутящий момент при работе на низких скоростях оборотов. Именно поэтому возникает необходимость в применении редуктора, что существенно повышает конечную стоимость конструкции;
- генерирование радио- и электромагнитных помех на высоких уровнях. Это обусловливается наличием в коллекторе скользящего контакта;
- меньший ресурс, причиной которому также является коллектор.
Применение таких устройств, требует учета зависимости между током потребления и скоростью вращения от уровня нагрузки на валу. Модели отличаются большей универсальностью и широко распространены, в частности в недорогих конструкциях, где на первом месте цена.
Рассмотрим же вкратце самые распространенные схемы и методы регулирования, которые широко применяются в отечественной механике и электронике, демонстрируя высокие уровни эффективности.
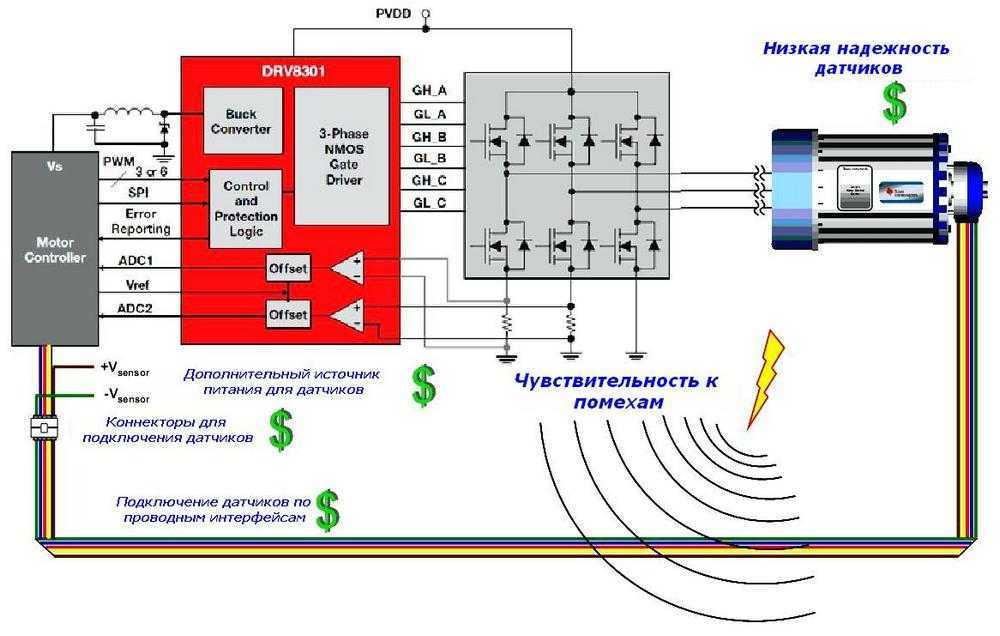
Схема драйвера мотора на IFX007T
Интегрированные полумосты IFX007T могут управляться ШИМ через контакт IN. Взаимодействие с микроконтроллером или Arduino упрощается благодаря встроенной микросхеме драйвера, которая имеет входы логического уровня, диагностику с измерением тока, регулировку скорости нарастания, генерацию мертвого времени и другие функции.
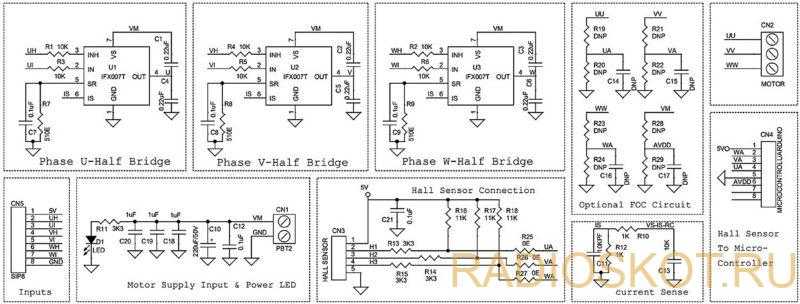
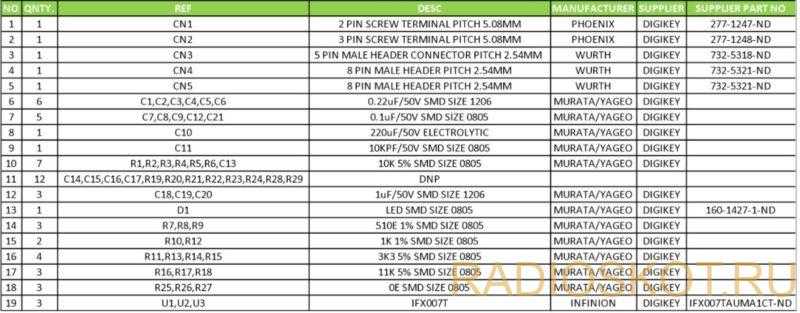
IFX007T полностью защищены от перегрева, пониженного напряжения, перегрузки по току и короткого замыкания. Проект способен на высокочастотный ШИМ – до 30 кГц. Все входы имеют логический уровень, выходы измерения тока предназначены для целей диагностики, а скорость нарастания регулируется с помощью R7, R8, R9, что можно использовать для быстрого и недорогого прототипирования (BL) управления двигателем постоянного тока, простого тестирования полумостового и полномостового управления двигателем. Для контроля температуры микросхемы IFX007 рекомендуется использовать принудительный обдув.
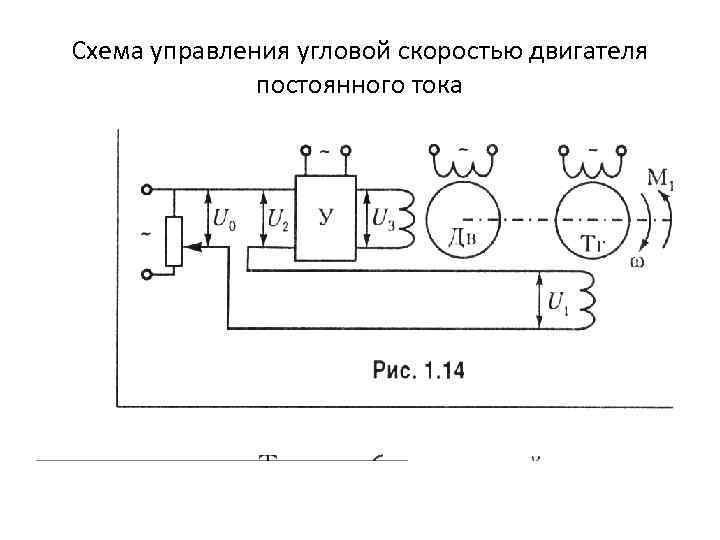
Способы регулировки мотором
Очевидно, что обеспечить управление электроприводом можно не только с помощью ручных, но и с помощью автоматических технических средств. Последние в виде того же контроллера скорости двигателя постоянного тока позволяет не только произвести запуск и остановку мотора, но и выявить, в каком направлении будет происходить его вращение, и определить скоростные режимы. Второй весомой функцией системы автоматики становится возможность регулировки и установки ограничений для моментов, а заодно и обеспечением эффективной защиты от поломок и нагрузок.
Главной составляющей системы управления такого формата является контроллер управления двигателем постоянного тока. Технические характеристики устройства напрямую будут зависеть от требуемого функционала, который прибор должен будет реализовывать.
Рассмотрим наиболее простой вариант для понимания принципов работы. Тогда контроллер управления двигателем постоянного тока соединяют мотор и источник энергии. Понятными примерами становятся бытовые электроприборы и электрические инструменты, которые используют в частных целях. Переключение управления обычно в таких случаях производится вручную с помощью реле или контактора.
Чтобы обеспечить данный процесс, понадобится подсоединить один из вышеуказанных конструктивных элементов к специальному датчику, который отвечает за пуск или приостановку мотора. У переключателя может быть два и более положений. Это необходимо для подбора наиболее подходящего способа подключения. Выбор нужного режима дает возможность регулировки напряжения при запуске, а также задания скорости, с которой в дальнейшем будет функционировать устройство.
Важно отметить, что, например, для систем с контроллером трехфазного двигателя постоянного тока нередко используются более сложные схемы. Такие подходя применяют для расширения имеющегося у оборудования функционала
Аппаратура позволяет регулировать темп или моменты с более высокой степенью точности. Если речь идет о промышленных условиях, то устройство может являться лишь одной из составляющих более масштабных систем, которые дают возможность управлять положением механизма по углу.

При этом контроллеры для двигателей постоянного тока разделяются по типам управления и могут быть:
- ручными;
- автоматическими;
- дистанционными.
Как уже говорилось выше, контроллер коллекторного двигателя постоянного тока может быть простым и отвечать за выполнение небольшого набора функций в виде запуска и остановки мотора, или же быть выполненными в усложненных версиях, где происходит контроль и регулирование реверса, перегрузок и т. д.
Защитный диод для индуктивной нагрузки
Каждый двигатель содержит проволочную обмотку (катушку) и, следовательно, в процессе управления двигателем на его выводах возникает всплеск ЭДС самоиндукции, которая может повредить транзисторы моста.
Чтобы решить эту проблему, вы можете использовать быстрые диоды типа Shottky или, если наши двигатели не являются особо мощными, просто обычные выпрямительные диоды, например 1N4007. Нужно иметь в виду, что выходы моста в процессе управления двигателем меняют свою полярность, поэтому необходимо использовать четыре диода вместо одного.
https://www.inventable.eu
Блок питания 0…30 В / 3A
Набор для сборки регулируемого блока питания…
Подробнее
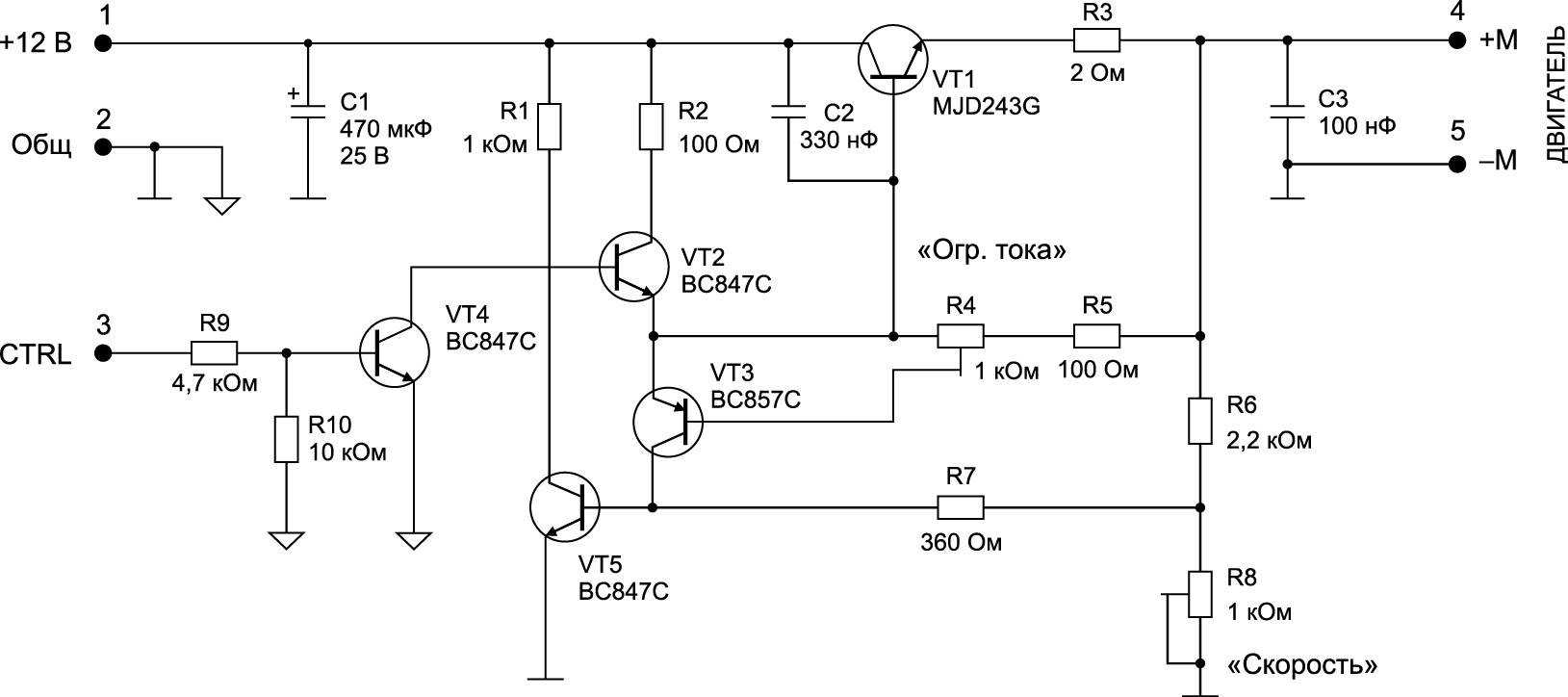
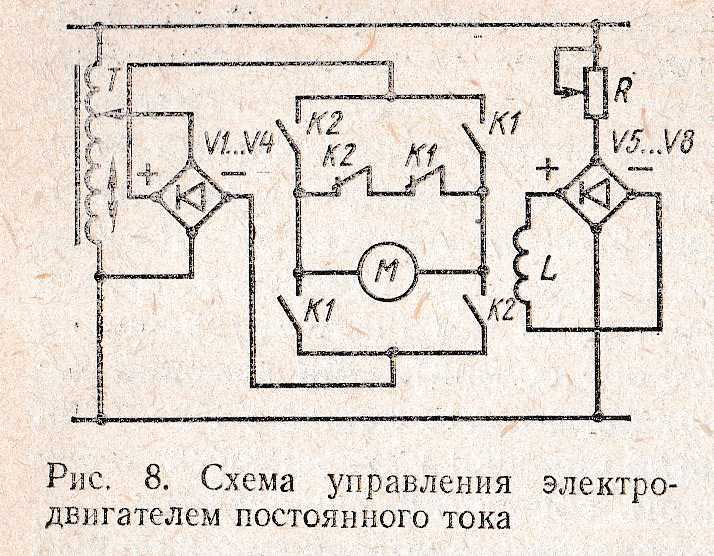
Реверс двигателя постоянного тока схемы.
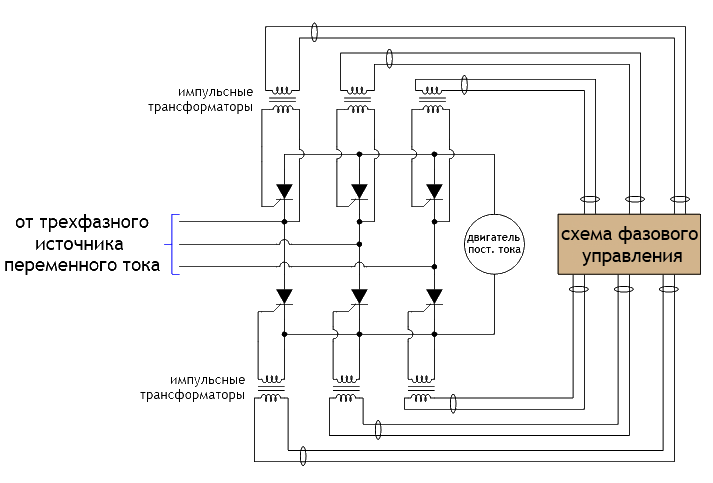
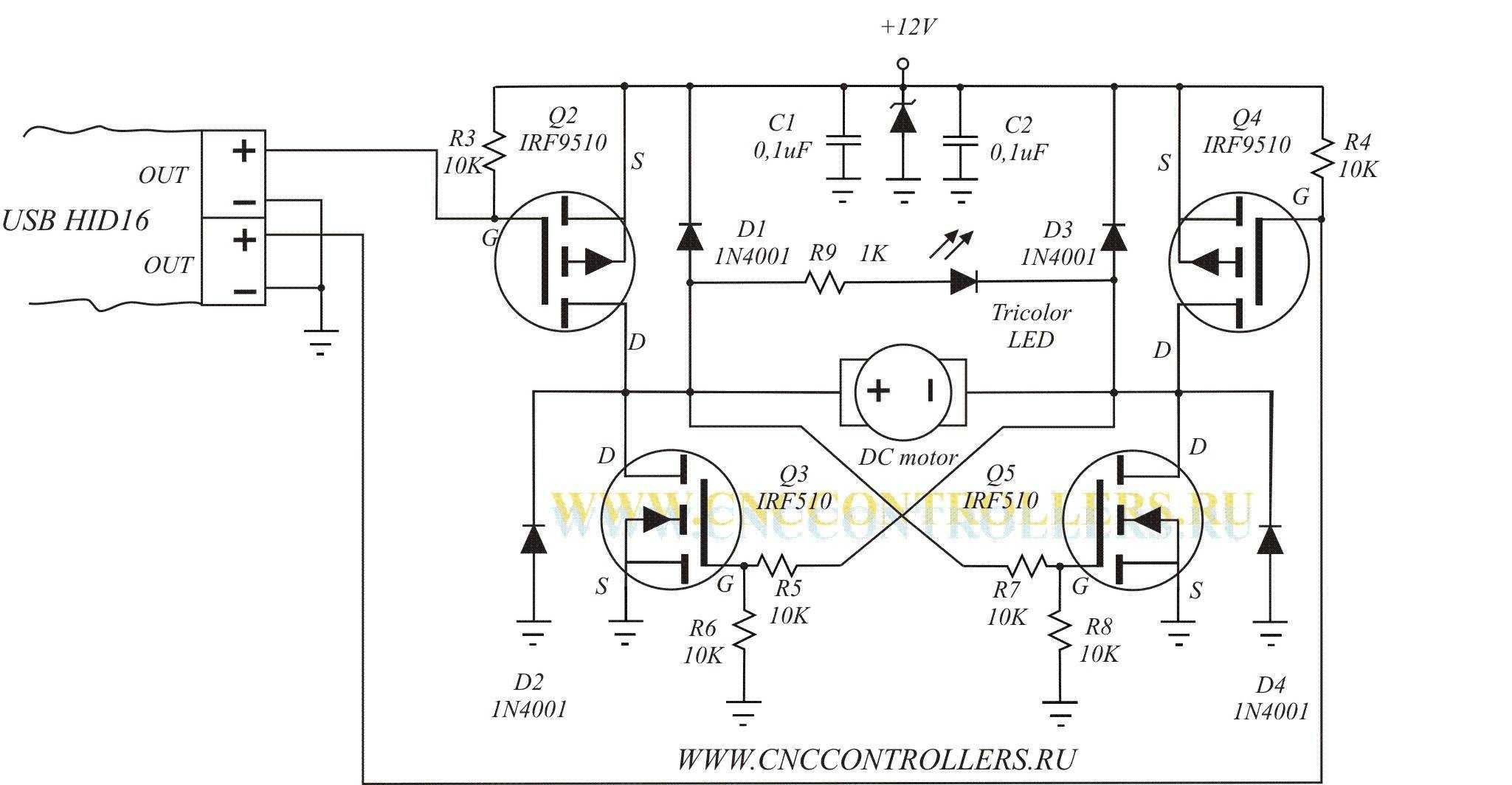
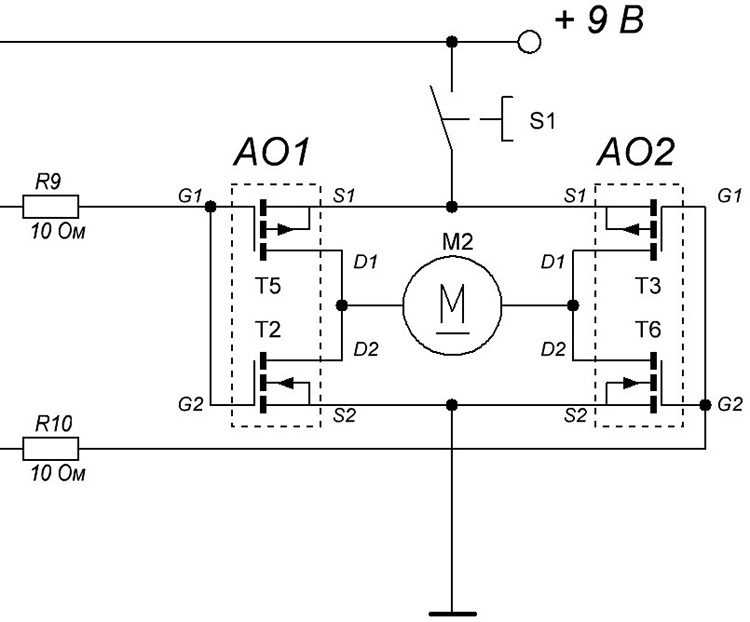
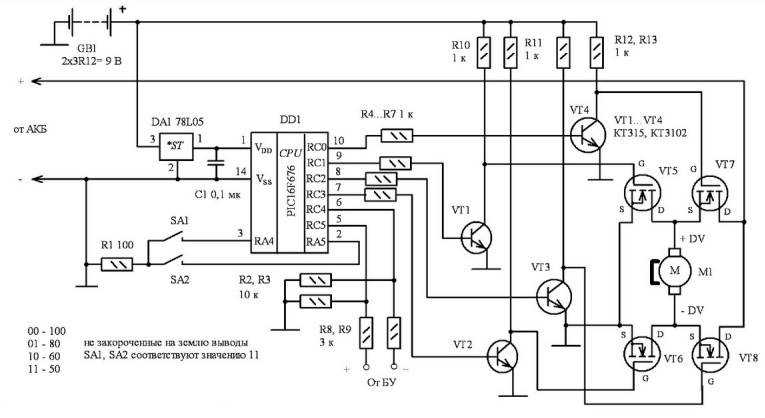
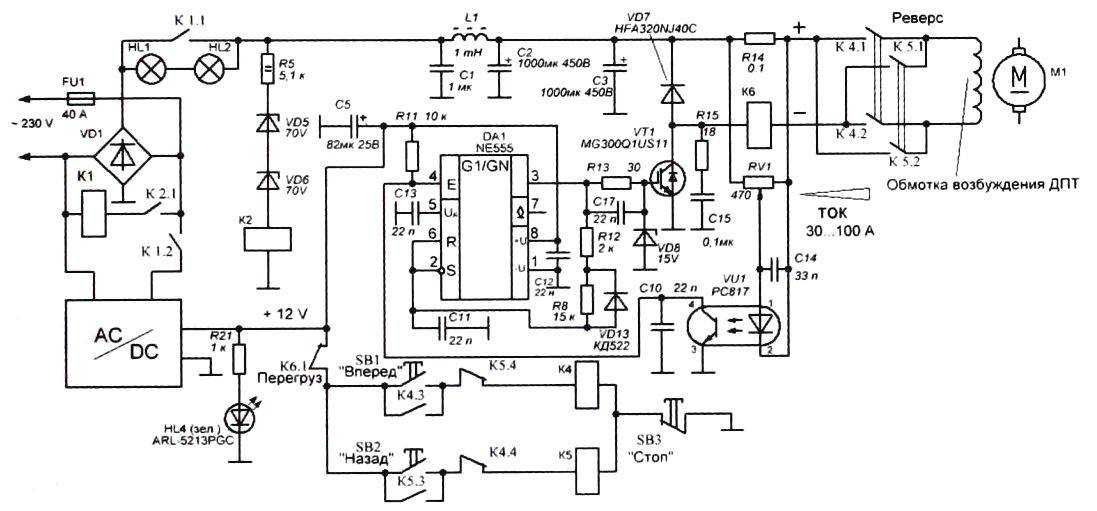
В статье «Регуляторы оборотов электродвигателей » речь шла о регулировке оборотов коллекторных двигателей электроинструментов. Нередко возникает и другая задача: реверс двигателя постоянного тока, т.е. требуется обеспечить его вращение в одну и другую стороны. Это может понадобиться, например, для привода ворот в гараже или коттедже, в различных моделях и пр. Проще всего такая задача с реверсом решается с помощью мостовой схемы, которая в общем виде представлена на рис.1 . Схема реверса состоит из четырех ключей, двигателя и источника питания. Когда все ключи разомкнуты ( рис.1а ), ток через двигатель не течет. При коммутации первого и четвертого ключа ток через двигатель Iд течет слева направо ( рис.1б ), и двигатель вращается в одном направлении. А при коммутации второго и третьего ключей — течет справа налево ( рис.1в ), и двигатель вращается в обратном направлении. Понятно, что руками коммутировать для реверса четыре переключателя неудобно, поэтому вместо ключей используем транзисторы ( рис.2 ). Транзисторы могут быть разной проводимости, полевыми или биполярными. Работают они в ключевом режиме. Обратно включенные диоды VD1. VD4 защищают транзисторы от выхода из строя, так как в момент выключения электродвигателя возникает достаточно большая ЭДС самоиндукции. Силовая часть устройства реверса на биполярных транзисторах приведена на рис.3 . Она состоит из четырех силовых и двух управляющих транзисторов; резисторов, ограничивающих базовые токи; шунтирующих диодов и гальванической развязки в виде двух оптопар. Питание моста происходит от блока питания, подающего постоянное напряжение +50 В относительно земли. В cостоянии покоя на оба канала (А и Б) подается 0 В. Все транзисторы закрыты, на концах обмоток потенциал 0 В. Вал двигателя не вращается. Для вращения двигателя в одну сторону на канал А подается постоянное напряжение +5 В или ШИМ-сигнал, на канал Б — 0 В. Открывается оптрон VU1, следом управляющий VТ5; при этом VТ6 закрыт. Через резистор R2 протекает ток, открывающий силовые VТ1 и VТ4, а VТ2 и VТЗ закрыты. Таким образом, на конце обмотки Я1 потенциал составляет +50 В, на конце обмотки Я2 — 0 В. Вал двигателя вращается (например, по часовой стрелке). Чтобы включить реверс двигателя, на канал Б подается напряжение +5 В (ШИМ-сигнал), на канал А — 0 В. Управляющий VТ6 открыт, VТ5 — закрыт. Через резистор R4 в цепи коллектора VТ6 протекает ток, открывающий VТ2 и VТ3, а VТ1 и VТ4 закрыты. На конце обмотки Я1 потенциал составляет 0 В, на конце обмотки Я2 — +50 В. Вал двигателя вращается против часовой стрелки. В случае подачи полoжительного напряжения на оба канала (А и Б) произойдет короткое замыкание, поэтому такой режим предотвращается управляющей частью устройства. Реверс двигателя постоянного тока можно выполнить и на МОП-транзисторах ( рис.4 ). На входе схемы реверса последовательно установлены два инвертора так, что выход одного одновременно является входом другого. При этом сигнал управления (высокий или низкий логический уровень) на входе DD1.1 инвертируется и подается на вход DD1.2. Выходы инверторов управляют полевыми транзисторами. При высоком уровне на входе, на выходе DD1.1 — низкий уровень, а на выходе DD1.2. — высокий. Благодаря этому VТ2 и VТЗ открыты и пропускают ток от отрицательного к положительному полюсу источника питания. Двигатель М1 вращается против часовой стрелки. Если на вход схемы реверса подать низкий уровень, на выходе DD1.1 появится высокий уровень и откроются VT1 и VТ4, замыкая другую диагональ моста. Теперь ток потечет в другую сторону, и двигатель изменит направление вращения. Для управления устройством для реверса необходим логический сигнал МОП-уровня (0/+12 В).
Устройство для реверса испытывалось с электродвигателем автомобильного вентилятора. Мощные МОП-транзисторы (для КП74ЗБ напряжение сток-затвор составляет 80 В. максимальный ток стока — 4,9 А) обеспечивают запас по мощности и по напряжению. Сопротивление открытого канала составляет 0,3.. .0,5 Ом. Для повышения эффективности VT1. . .VТ4 устанавливаются на теплоотводы. Напряжение питания зависит от типа применяемого электродвигателя М1. Если его напряжение питания превышает 15 В, следует предусмотреть в схеме дополнительный стабилизатор для питания микросхемы DD1. Вместо К561ЛА7 можно применить другую микросхему серии 561, если ее элементы обеспечивают инвертирование сигнала (К561ЛЕ5, К561ЛН2). Другая схема управления реверсом, построенная на мощных комплементарных полевых транзисторах, показана на рис.5 .
Вывод
Как можно видеть, в современной электротехнике применяется множество эффективных способов регулировки. Все они обеспечивают слаженную работу двигателей, с минимумом затрат. Реализованы также инновационные технологии, позволяющие управлять мотором через вайфай. Подбор конкретного метода стоит проводить, ориентируясь на параметры агрегата и его технические возможности. Ресурс двигателя при этом не снижается, ведь каждый отдельно взятый способ учитывает все конструктивные особенности.
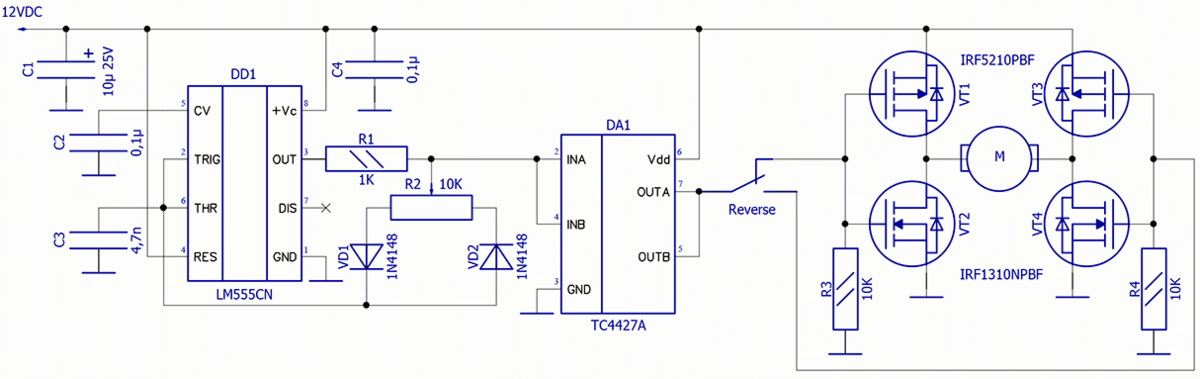
На рынке представлено множество вариаций регуляторов, каждый из которых создан на основе конкретного метода. Чаще всего применяется ШИМ импульсы, а также всяческие их комбинации, например с мостовыми схемами.