
Если нужно управлять плюсовым контактом
В таком случае нам понадобится другой мосфет- транзистор — P-канальный. Схема аналогична, только подтягивающий резистор подключен к плюсу.
Также нужно будет инвертировать сигнал на выходе ардуино, ведь при подаче 5 вольт транзистор будет закрываться, а при 0 — открываться, значит шим скважностью в 30% выдаст 70% мощность на выходе схемы. ШИМ на irf4905, питание5 v
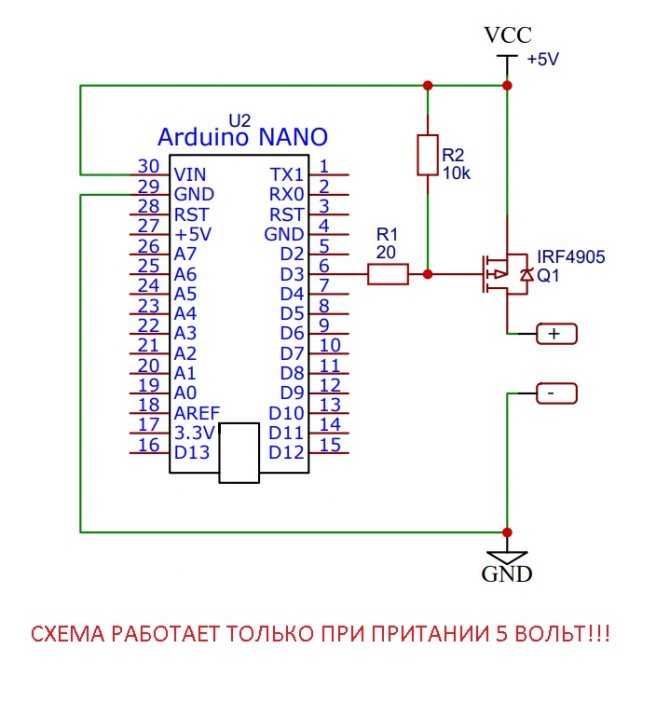
ШИМ на irf4905, питание5 v
Стоит оговориться такая схема будет работать только при питании не выше 5 вольт, так как для полного закрытия P-канального транзистора необходимо подтянуть его затвор к плюсу питания, а ардуина способна выдавать на цифровой пин только 5 вольт. Значит, при питании хотя бы чуть-чуть выше напряжения выдаваемого на цифровой пин транзистор будет не полностью закрываться при верхней части импульса ШИМ и БУДЕТ СИЛЬНО ГРЕТЬСЯ. Полностью отключить нагрузку он тоже не сможет.
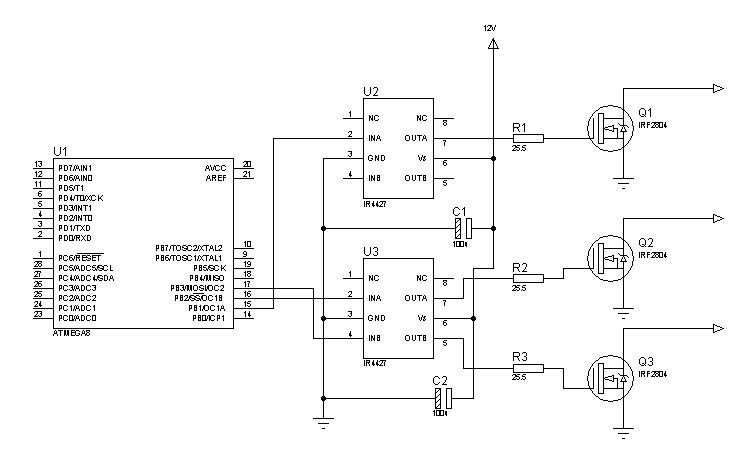
Если нужно управлять, к примеру,12 -ти вольтовым устройством, то схема немного усложнится. Добавится так называемое «плечо раскачки» или драйвер полевого транзистора. По классике он собирается на двух, а иногда и на трёх транзисторах, но мы есть вариант немного проще, который работает при невысоких частотах:
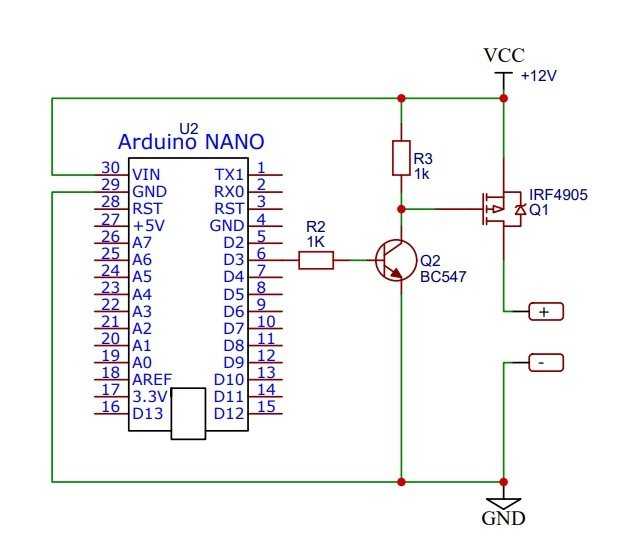
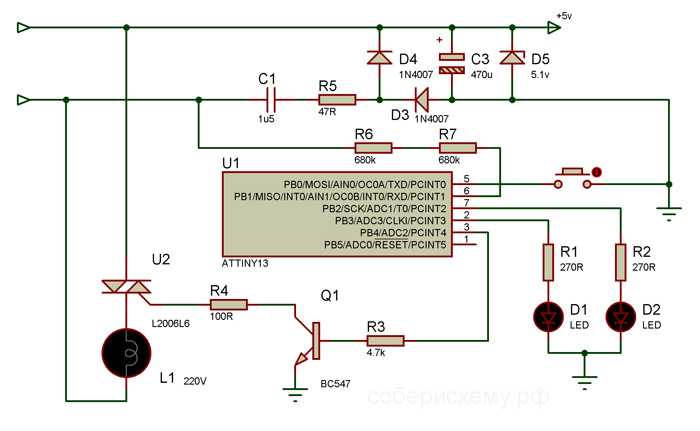
Ардуино, управление ШИМ по плюсовому проводу IRF4905
Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
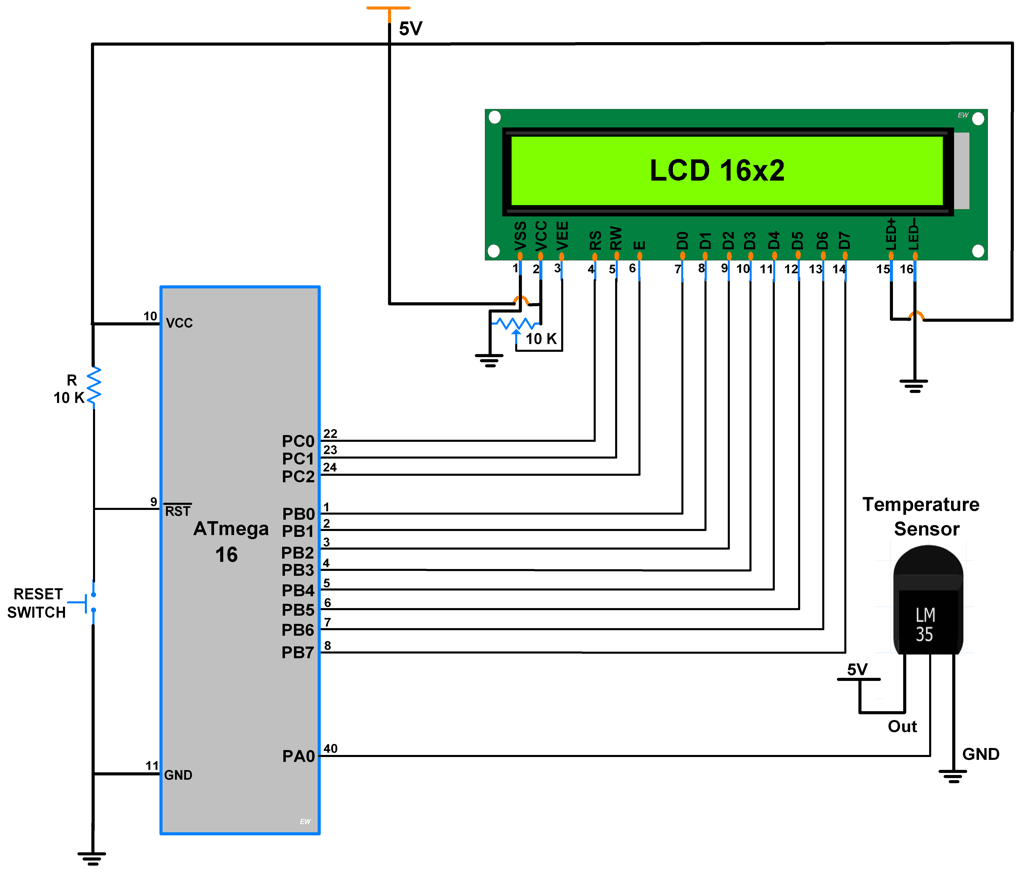
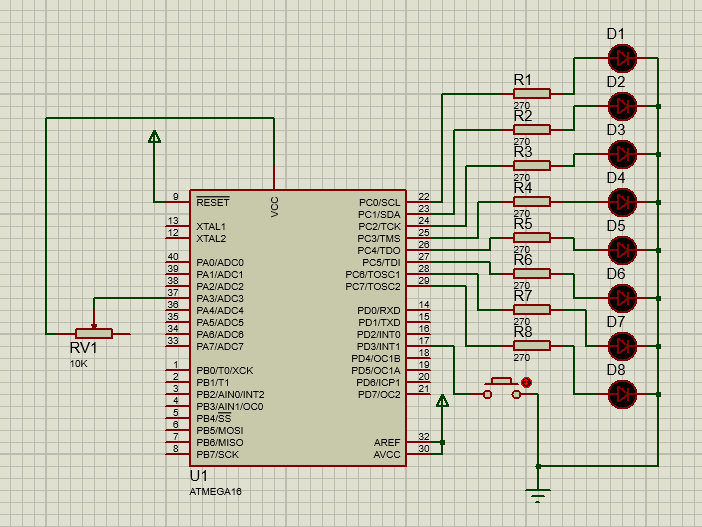
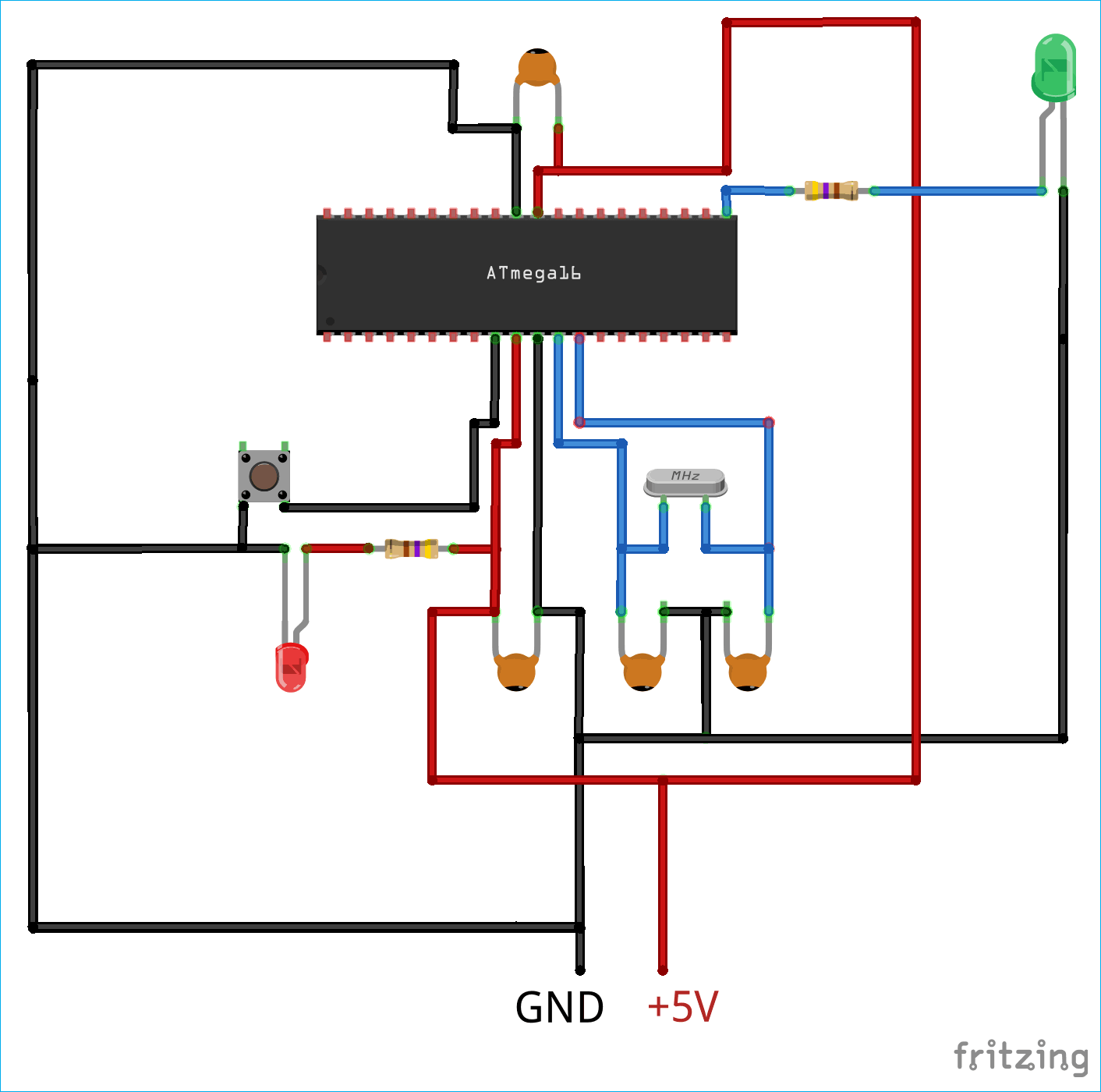
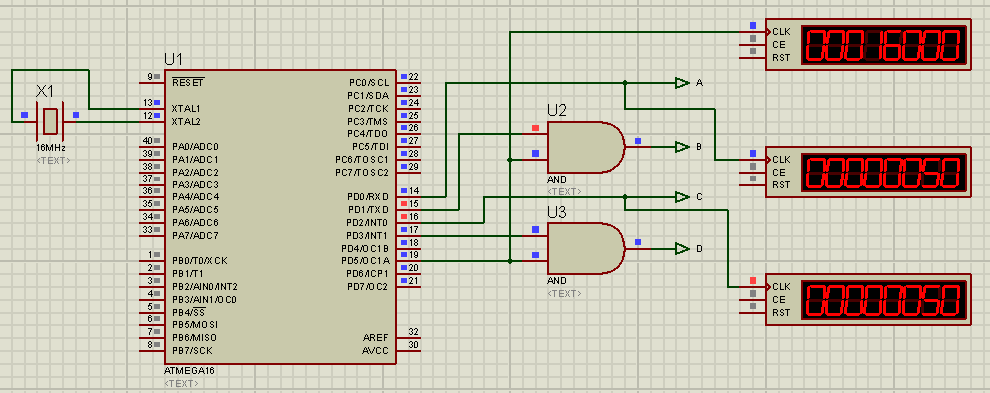
Программирование ШИМ сигнала в микроконтроллере ATmega16 на языке С (Си)
Принцип работы ШИМ
Сигнал, промодулированный по ширине импульса, формируется двумя способами:
- аналоговым;
- цифровым.
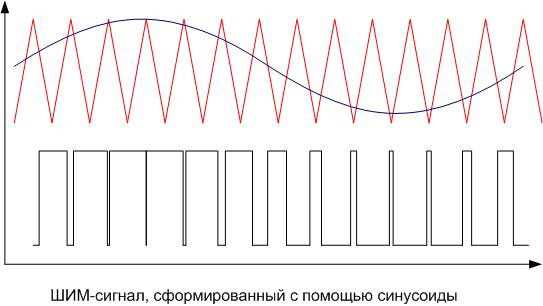
При аналоговом способе создания ШИМ-сигнала несущая в виде пилообразного или треугольного сигнала подается на инвертирующий вход компаратора, а информационный – на неинвертирующий. Если мгновенный уровень несущей выше модулирующего сигнала, то на выходе компаратора ноль, если ниже – единица. На выходе получается дискретный сигнал с частотой, соответствующей частоте несущего треугольника или пилы, и длиной импульса, пропорциональной уровню модулирующего напряжения.
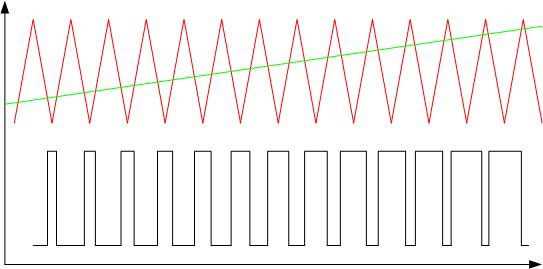
В качестве примера приведена модуляция по ширине импульса треугольного сигнала линейно-возрастающим. Длительность выходных импульсов пропорциональна уровню выходного сигнала.
Аналоговые ШИМ-контроллеры выпускаются и в виде готовых микросхем, внутри которых установлен компаратор и схема генерации несущей. Имеются входы для подключения внешних частотозадающих элементов и подачи информационного сигнала. С выхода снимается сигнал, управляющий мощными внешними ключами. Также имеются входы для обратной связи – они нужны для поддержания установленных параметров регулирования. Такова, например, микросхема TL494. Для случаев, когда мощность потребителя относительно невелика, выпускаются ШИМ-контроллеры со встроенными ключами. На ток до 3 ампер рассчитан внутренний ключ микросхемы LM2596.
Цифровой способ осуществляется применением специализированных микросхем или микропроцессоров. Длина импульса регулируется внутренней программой. Во многих микроконтроллерах, включая популярные PIC и AVR, «на борту» имеется встроенный модуль для аппаратной реализации ШИМ, для получения PWM-сигнала надо активировать модуль и задать параметры его работы. Если такой модуль отсутствует, то ШИМ можно организовать чисто программным методом, это несложно. Этот способ дает более широкие возможности и предоставляет больше свободы за счёт гибкого использования выходов, но задействует большее количество ресурсов контроллера.
Способы управления электрической мощностью
Рассмотрим, в чем разница между этими двумя способами. Электрическая мощность может быть активной и определять выделяемое тепло. Также существует реактивная мощность, определяющая электромагнитные поля. В любом случае величина мощности зависит от внешнего воздействия – напряжения. Свойства нагрузки при том или ином напряжении повлияют на силу тока, а также на мощность. Если уменьшать амплитуду напряжения на нагрузке, потребуется дополнительный элемент. Наиболее универсальным следует назвать резистор. Он создаст падение напряжения как при постоянном, так и при переменном напряжении. Но при этом станет источником тепловых потерь. Если напряжение переменное, вместо резистора может быть использован дроссель. В таком случае потери тепла будут пренебрежимо малы. Ведь они будут только в обмотке и сердечнике.
Но сопротивление обмотки минимально, и на ней практически нет активной составляющей напряжения с вытекающими из этого потерями. Так же, как и пластинчатый сердечник минимизирует вихревые токи и выделение тепла. Однако при этом дроссель массивен и громоздок. И главное, он работоспособен исключительно в электрической цепи с переменным напряжением. А управление таким индуктивным элементом существенно усложняет его конструкцию. При этом она получается электрически инерционной. А это свойство зачастую неприемлемо.
Широтно-импульсная модуляция — ШИМ
Причины и области применения ШИМ
Принцип широтно-импульсной модуляции используется в регуляторах частоты вращения мощных асинхронных двигателей. В этом случае модулирующий сигнал регулируемой частоты (однофазный или трехфазный) формируется маломощным генератором синусоиды и накладывается на несущую аналоговым способом. На выходе получается ШИМ-сигнал, который подается на ключи потребной мощности. Дальше можно пропустить получившуюся последовательность импульсов через фильтр низкой частоты, например через простую RC-цепочку, и выделить исходную синусоиду. Или можно обойтись без нее – фильтрация произойдет естественным образом за счёт инерции двигателя. Очевидно, что чем выше частота несущей, тем больше форма выходного сигнала близка к исходной синусоиде.
Возникает естественный вопрос – а почему нельзя усилить сигнал генератора сразу, например, применением мощных транзисторов? Потому что регулирующий элемент, работающий в линейном режиме, будет перераспределять мощность между нагрузкой и ключом. При этом на ключевом элементе впустую рассеивается значительная мощность. Если же мощный регулирующий элемент работает в ключевом режиме (тринистор, симистор, RGBT-транзистор), то мощность распределяется во времени. Потери будут намного ниже, а КПД – намного выше.
В цифровой технике особой альтернативы широтно-импульсному регулированию нет. Амплитуда сигнала там постоянна, менять напряжение и ток можно лишь промодулировав несущую по ширине импульса и впоследствии усреднив её. Поэтому ШИМ применяют для регулирования напряжения и тока на тех объектах, которые могут усреднять импульсный сигнал. Усреднение происходит разными способами:
- За счет инерции нагрузки. Так, тепловая инерция термоэлектронагревателей и ламп накаливания позволяет объектам регулирования заметно не остывать в паузах между импульсами.
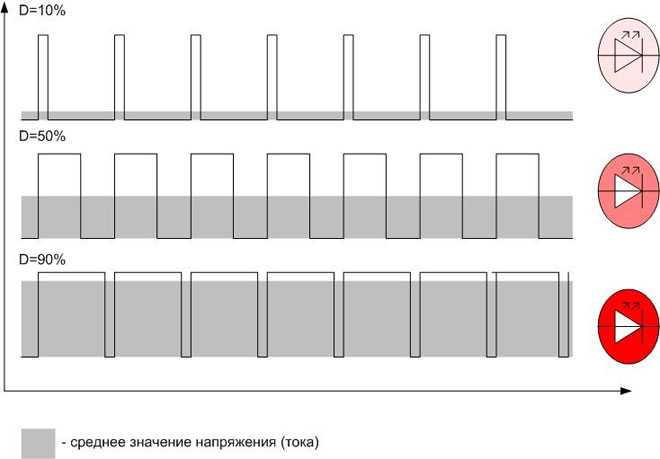
- За счёт инерции восприятия. Светодиод успевает погаснуть от импульса к импульсу, но человеческий глаз этого не замечает и воспринимает как постоянное свечение с различной интенсивностью. На этом принципе построено управление яркостью точек LED-мониторов. Но незаметное мигание с частотой несколько сот герц все же присутствует и служит причиной усталости глаз.
- За счет механической инерции. Это свойство используется при управлении коллекторными двигателями постоянного тока. При правильно выбранной частоте регулирования двигатель не успевает затормозиться в бестоковых паузах.
Поэтому ШИМ применяют там, где решающую роль играет среднее значение напряжения или тока. Кроме упомянутых распространенных случаев, методом PWM регулируют средний ток в сварочных аппаратах и зарядных устройствах для аккумуляторных батарей и т.д.
Если естественное усреднение невозможно, во многих случаях эту роль на себя может взять уже упомянутый фильтр низкой частоты (ФНЧ) в виде RC-цепочки. Для практических целей этого достаточно, но надо понимать, что без искажений выделить исходный сигнал из ШИМ с помощью ФНЧ невозможно. Ведь спектр PWM содержит бесконечно большое количество гармоник, которые неизбежно попадут в полосу пропускания фильтра. Поэтому не стоит строить иллюзий по поводу формы восстановленной синусоиды.
Очень эффективно и эффектно управление методом ШИМ RGB-светодиодом. Этот прибор имеет три p-n перехода – красный, синий, зеленый. Изменяя раздельно яркость свечения каждого канала, можно получить практически любой цвет свечения LED (за исключением чистого белого). Возможности по созданию световых эффектов с помощью PWM безграничны.
Наиболее употребительная сфера применения цифрового сигнала, промодулированного по длительности импульса – регулирование среднего тока или напряжения, протекающего через нагрузку. Но возможно и нестандартное использование этого вида модуляции. Все зависит от фантазии разработчика.
Что такое импульсный блок питания и где применяется
Чем отличаются аналоговый сигнал от цифрового — примеры использования
Преобразователи напряжения с 12 на 220 вольт
Как работает транзистор и где используется?
Режимы работы, описание характеристик и назначение выводов микросхемы NE555
Что такое выпрямитель напряжения и для чего нужен: типовые схемы выпрямителей
Индивидуальные задания
- Измените третий пример так, чтобы после плавного увеличения яркости, светодиоды гасли плавно.
- Подберите соотношение яркости светодиодов так, чтобы добиться белого свечения светодиода.
- Сделайте из шилда лампу настроения. Цвета должны случайным образом переливаться. Организуйте основной цикл так, чтобы сначала случайным образом выбирался номер вывода, а потом он плавно зажигался и гас. Для этого можно использовать функцию random(min,max). Для работы с ней объявите переменную int pin=0; и в цикле void loop() вызовите эту функцию pin=random(9,12);. Она запишет в переменную pin значение от 9 до 11.
Остальные статьи цикла можно найти здесь.
Мы будем очень рады, если вы поддержите наш ресурс и посетите магазин наших товаров shop.customelectronics.ru.

Формирование аналогового сигнала
AnalogRead – это функция, которая используется для считывания аналоговых значений из аналоговых контактов ШИМа на Ардуино. Плата Arduino UNO имеет 6-канальный 10-битный аналого-цифровой преобразователь (АЦП). Это означает, что АЦП в Arduino UNO будет отображать входные напряжения от 0 до 5 В в целое значение от 0 до 1023.
Следовательно, функция analogRead возвращает любое значение от 0 до 1023. Синтаксис функции analogRead – analogRead (аналоговый вывод no).
Поскольку мы считываем аналоговые напряжения от потенциометра на выводе A0, нам нужно написать analogRead (A0) в эскизе. Когда он возвращает целочисленное значение, с ним создается временная переменная целочисленного типа данных. Следующая функция – analogWrite. Это функция, которая используется для установки рабочего цикла сигнала ШИМ для любого заданного штыря ШИМ.
Синтаксис функции analogWrite – analogWrite (вывод PWM no, value).
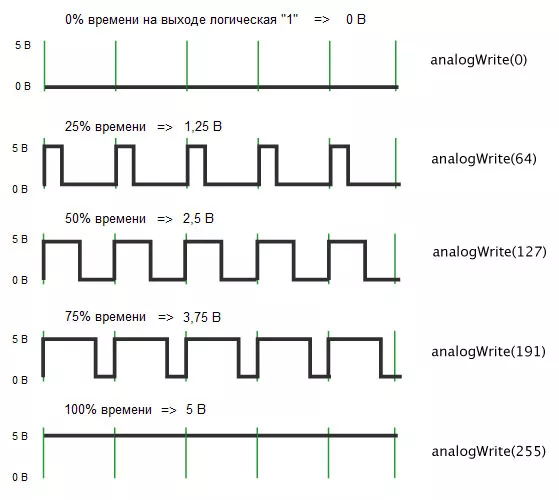
Значение указывает рабочий цикл и должно быть значением от 0 (0 В) до 255 (5 В).
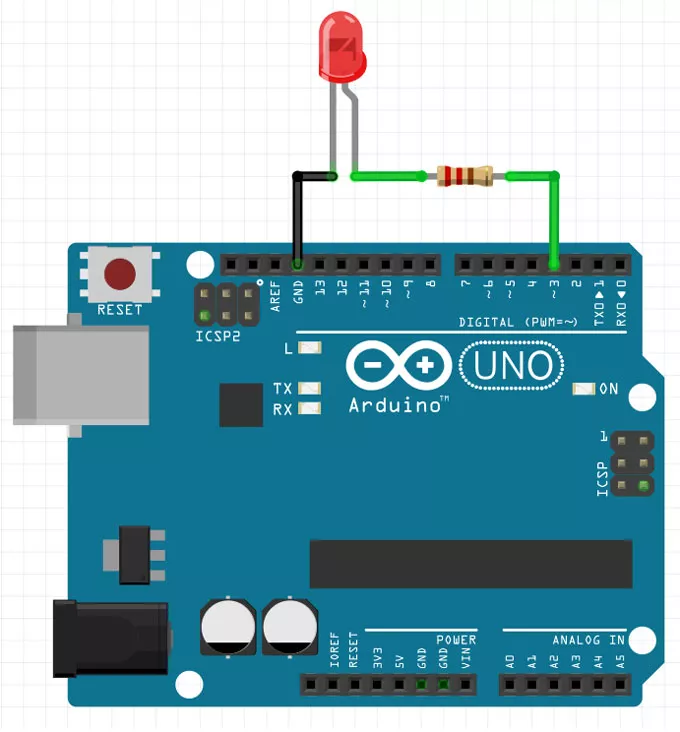
Перейдем к фактическому эскизу схемы управления яркостью светодиода. Окончательный эскиз показан на следующем рисунке.
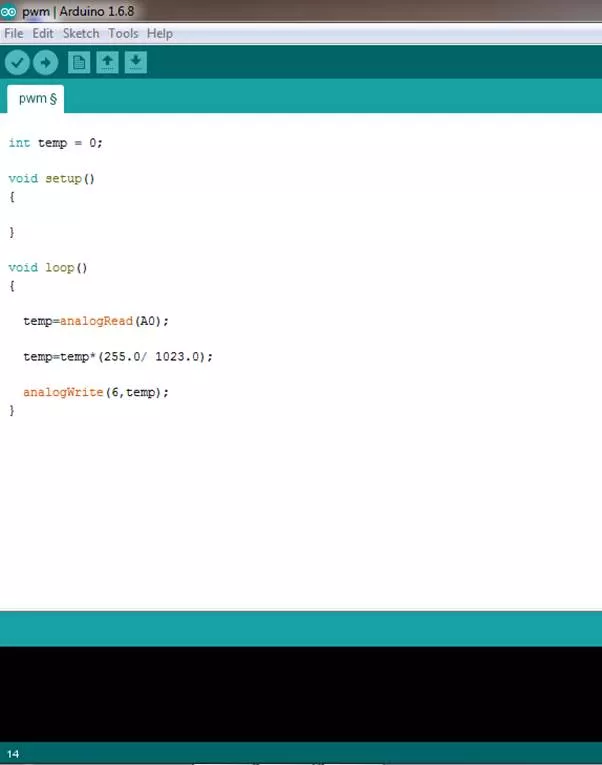
Из приведенного выше эскиза мы можем легко понять, что значение, возвращаемое функцией analogRead, сохраняется в переменной temp. Это значение будет использоваться для управления рабочим циклом сигнала ШИМ с помощью функции analogWrite.
Но диапазон значений, принимаемых функцией analogWrite, находится в диапазоне от 0 до 255. Следовательно, нам нужно выполнить некоторые математические вычисления, чтобы поместить подходящее значение в функцию analogWrite.
Наконец, вычисленное значение помещается в функцию analogWrite вместе с выводом PWM для получения сигнала PWM.
Когда схема построена, и эскиз загружен в Arduino, мы видим, что, изменяя положение потенциометра, яркость светодиода мы также можем изменить.
Еще один вариант скетча для Ардуино:
int ledPin = 3; // объявляем пин, управляющий светодиодом
int brightness = 0; // переменная для задания яркости
int fadeAmount = 5; // шаг изменения яркости
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
analogWrite(ledPin, brightness); // устанавливаем яркость brightness на выводе ledPin
brightness += fadeAmount; // изменяем значение яркости
/* при достижении границ 0 или 255
меняем направление изменения яркости */
if (brightness == 0 || brightness == 255) {
fadeAmount = -fadeAmount; // изменяем знак шага
}
delay(30); // задержка для большей видимости эффекта
}
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Зачем нужен был конденсатор?
Характеристики ШИМ сигнала
Важными характеристиками ШИМ сигнала являются:
амплитуда (U);
частота (f);
скважность (S) или коэффициент заполнения D.
Амплитуда в вольтах задается в зависимости от нагрузки. Она должна обеспечивать номинальное напряжение питания потребителя.
Частота сигнала, модулируемого по ширине импульса, выбирается из следующих соображений:
Чем выше частота, тем выше точность регулирования.
Частота не должна быть ниже времени реакции устройства, которым управляют с помощью ШИМ, иначе возникнут заметные пульсации регулируемого параметра.
Чем выше частота, тем выше коммутационные потери. Он возникают из-за того, что время переключения ключа конечно. В запертом состоянии на ключевом элементе падает все напряжение питания, но ток почти отсутствует. В открытом состоянии через ключ протекает полный ток нагрузки, но падение напряжения невелико, так как проходное сопротивление составляет единицы Ом. И в том, и в другом случае рассеяние мощности незначительно. Переход от одного состояния к другому происходит быстро, но не мгновенно. В процессе отпирания-запирания на частично открытом элементе падает большое напряжение и одновременно через него идёт значительный ток. В это время рассеиваемая мощность достигает высоких значений. Этот период невелик, ключ не успевает значительно разогреться. Но с повышением частоты таких временных промежутков за единицу времени становится больше, и потери на тепло повышаются
Поэтому для построения ключей важно использование быстродействующих элементов.
При управлении электродвигателем частоту приходится уводить за пределы слышимого человеком участка – 25 кГц и выше. Потому что при более низкой частоте ШИМ возникает неприятный свист.
Эти требования часто находятся в противоречии друг к другу, поэтому выбор частоты в некоторых случаях – это поиск компромисса.
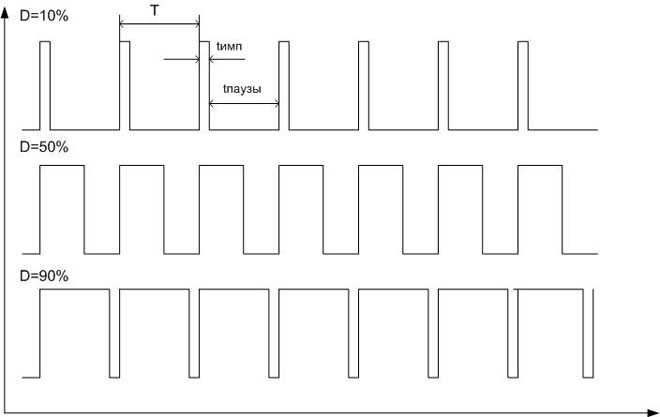
Величину модуляции характеризует скважность. Так как частота следования импульсов постоянна, то постоянна и длительность периода (T=1/f)
Период состоит из импульса и паузы, имеющих длительность, соответственно, tимп и tпаузы, причем tимп+tпаузы=Т. Скважностью называется отношение длительности импульса к периоду – S=tимп/T. Но на практике оказалось удобнее пользоваться обратной величиной – коэффициентом заполнения: D=1/S=T/tимп. Еще удобнее выражать коэффициент заполнения в процентах.
Расшифровка и определение ШИМ
Модуляция ширины импульса означает, что ширина импульса возникает строго в прямоугольной волне.
Это улучшает управление двигателем. Вместо чистого сигнала постоянного тока к двигателю используется серия импульсов. Они могут находиться на максимальном напряжении, но только на долю секунды. Выполнение повторных действий приведет к тому, что двигатель начнет вращаться. Это позволит более комфортно управлять скоростью. Простое применение сигнала постоянного тока не приведет к преодолению трения двигателя и передач, наоборот, запуск будет обрывистый с низкой скоростью.
Увеличивая частоту импульсов ШИМа на Ардуино, можно выполнять операции на высокой скорости.
Декодер создает этот сигнал для управления двигателем. Это та же концепция, что и функции мощности импульса, находящиеся на блоках питания постоянного тока.
Рассмотрим основные преимущества использования ШИМ Ардуино:
- Эффективность электропитания: индукция обмоток ротора будет усреднять ток (индукторы сопротивляются изменению тока). Транзисторы имеют низкий импеданс при низком падении напряжения и рассеивании мощности. Резистор рассеивает большую мощность (I2R) в виде тепла.
- Управление скоростью: двигатель будет видеть источник с низким импедансом, даже если он постоянно переключается между высоким и низким напряжением. Результат очевиден – двигатель ускоряется. Серийное сопротивление приведет к тому, что двигатель будет испытывать малое напряжение, поэтому легко остановится в нужный момент.
- Цепь управления: для цифровой электроники (например, микроконтроллера ) очень легко включать или выключать напряжение с помощью транзисторов. Аналоговый выход (с электронным или механическим управлением) требует большего количества компонентов и увеличивает рассеивание мощности. Это будет более дорогостоящим вариантом, с точки зрения электроники и требований к электропитанию.
Создать широтно-импульсный модулятор можно на esp8266 шим, на Ардуино УНО и Ардуино Нано шим. То есть для конструирования подойдет любая модель описываемого микроконтроллера.
Что такое ШИМ сигнал
ШИМ – это сигнал с различными интервалами ON и OFF сигнала (различными продолжительностями включения). Время, в течение которого сигнал имеет высокий уровень, называется временем включения (“on time”), а время, в течение которого сигнал имеет низкий уровень — время выключения (“off time”). У ШИМ сигнала есть два параметра, которые мы рассмотрим далее.
Коэффициент заполнения (скважность) ШИМ
Процент времени, в течение которого ШИМ сигнал имеет высокий уровень, называется коэффициентом заполнения (скважностью). К примеру, коэффициент заполнения ШИМ сигнала с периодом (длительностью) 100 мс, в котором в течение 50 мс сигнал имеет высокий уровень и в течение 50 мс имеет низкий уровень, равен 50%
Аналогично, если для такой же длительности (100 мс) сигнал 25 мс остается на высоком уровне и 75 мс на низком, то коэффициент заполнения для такого сигнала будет равен 25%. Для его определения нам необходимо знать только длительность высокого уровня сигнала (длительность низкого уровня легко определить как разность между периодом сигнала и длительность сигнала высокого уровня). Более наглядно ШИМ сигнал представлен на следующем рисунке.
Формула для расчета коэффициента заполнения/скважности (Duty Cycle) выглядит следующим образом:
Duty Cycle (%) = On Time/(On Time + Off Time)
Таким образом, изменяя коэффициент заполнения ШИМ сигнала мы можем изменять интенсивность свечения светодиода.
Выбор режима ШИМ
После выбора нужного нам коэффициента заполнения необходимо выбрать еще режим ШИМ – то есть то, каким образом ШИМ будет работать. Существует три типа ШИМ:
- Быстрая ШИМ (Fast PWM).
- ШИМ с коррекцией фазы (Phase Correct PWM).
- ШИМ с коррекцией фазы и частоты (Phase and Frequency Correct PWM).
Быстрая ШИМ используется в случаях когда нам не важна фаза импульсов, например, управление скоростью вращения двигателя или яркостью свечения светодиода.
Для генерации быстрой ШИМ нам необходимо будет запустить на таймере счет и когда он досчитает до определенного значения сбрасывать значение таймера снова в ноль. Таким образом мы установим период следования ШИМ импульсов. Таким образом мы можем контролировать импульс, устанавливая высокое значение сигнала когда счетчик таймера досчитает до определенного значения. А когда счетчик будет возвращаться в 0 на это время сигнал будет низкого уровня. Таким образом, мы имеем большую гибкость в управлении ШИМ сигналом используя всего лишь один таймер.



Заключение
Как мы отметили вначале, эта статья написана не для того, чтобы отпугнуть людей от современных ЖК-дисплеев, а для того, чтобы помочь людям узнать о потенциальной проблеме, связанной с ШИМ. С учётом растущей популярности мониторов с подсветкой на основе белых светодиодов (W-LED) довольно вероятно появление большего количества жалоб пользователей по сравнению с более старыми дисплеями, и связано это с использованием ШИМ-метода и, в конечном итоге, с выбранным типом подсветки. Конечно, проблемы, к которым может привести использование ШИМ, заметны не каждому, и в действительности я ожидаю, что людей, которые никогда не испытают описанных симптомов, гораздо больше, чем тех, кто испытает. Для тех, кто страдает от побочных эффектов, включая головные боли и перенапряжение глаз, теперь есть хотя бы объяснение.
Учитывая, что такая технология, как ШИМ, используется давно и успешно, а также многие годы её использования в CCFL-дисплеях, я, откровенно говоря, сомневаюсь, что в ближайшее время в этом плане что-то изменится, даже при усиливающемся переходе к светодиодной подсветке. ШИМ по-прежнему является надёжным способом управления интенсивностью подсветки и, следовательно, предлагает возможности регулирования яркости, необходимые каждому пользователю.
Тем, кто беспокоится о побочных эффектах или имеет проблемы с предыдущими дисплеями, следует попробовать определить частоту ШИМ в их новом дисплее и, возможно, даже попробовать найти экран, в котором ШИМ для управления яркостью подсветки не используется вообще. К сожалению, нам ещё предстоить увидеть, как производители станут указывать какие-либо технические характеристики, касающиеся использования ШИМ, или её частоту при определённых уровнях яркости, поэтому сейчас об этом судить трудно.
Установка максимальной яркости экрана является одним из возможных методов, помогающих уменьшить побочные эффекты благодаря меньшей скважности. Это решение, конечно, не идеально, поскольку многие дисплеи имеют очень высокий заводской или максимальный уровень яркости, но это хотя бы что-то, что может помочь
Управление яркостью на программном уровне или средствами драйвера видеокарты может помочь вернуть более комфортную яркость, но может привести к снижению контрастности.