

Виды электродвигателей
По источнику питания приводы разделяют на работающие от:
- Постоянного тока.
- Переменного тока.
По принципу работы их, в свою очередь, делят на:
- Коллекторные.
- Вентильные.
- Асинхронные.
- Синхронные.
Вентильные двигатели не относят к отдельному классу, так как их устройство является вариацией коллекторного привода. В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно их интегрируют вместе с платой управления. За их счет происходит согласованная коммутация якоря.
Синхронные и асинхронные двигатели работают исключительно от переменного тока. Управление оборотами происходит с помощью сложной электроники. Асинхронные делятся на:
- Трехфазные.
- Двухфазные.
- Однофазные.
Теоретическая формула мощности трехфазного электродвигателя при соединении в звезду или треугольником
P = 3 * Uф * Iф * cos(alpha).
Однако для линейных значений напряжения и тока она выглядит как
P = 1,73 × Uф × Iф × cos(alpha).
Это будет реальный показатель, сколько мощности двигатель забирает из сети.
Синхронные подразделяются на:
- Шаговые.
- Гибридные.
- Индукторные.
- Гистерезисные.
- Реактивные.
В своей конструкции шаговые двигатели имеют постоянные магниты, поэтому их не относят к отдельной категории. Управление работой механизмов производится с помощью частотных преобразователей. Существуют также универсальные двигатели, которые функционируют от постоянного и переменного тока.
Конструкция электрического двигателя
Привод включает в себя:
- Ротор.
- Статор.
- Подшипники.
- Воздушный зазор.
- Обмотку.
- Коммутатор.
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.
Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
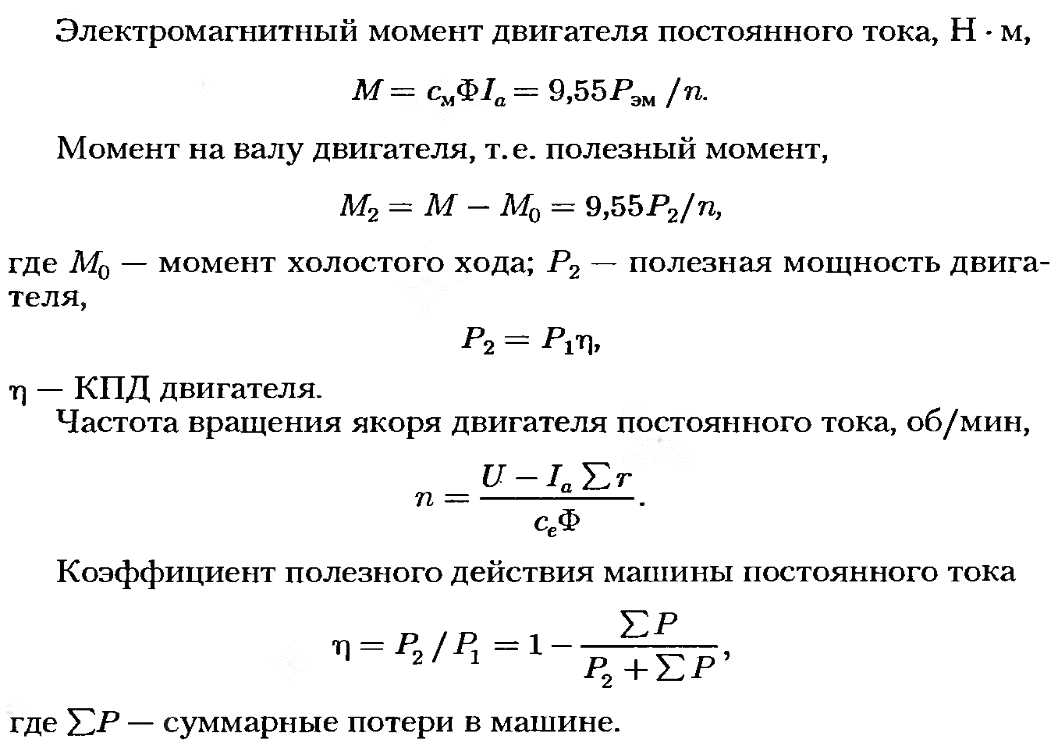
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.


где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Конструкция электрического двигателя
Привод включает в себя:
- Ротор.
- Статор.
- Подшипники.
- Воздушный зазор.
- Обмотку.
- Коммутатор.
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.

Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.

Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.

Калькулятор мощности – расчет по току, напряжению, сопротивлению
С помощью калькулятора мощности вы можете самостоятельно выполнить расчет мощности по току и напряжению для однофазных (220 В) и трехфазных сетей (380 В). Программа также рассчитывает мощность через сопротивление и напряжение, или через ток и сопротивление согласно закону Ома. Значение cos φ принимается согласно указаниям технического паспорта прибора, усредненным значениям таблиц ниже или рассчитываются самостоятельно по формулам. Без необходимости рекомендуем не изменять коэффициент и оставлять равным 0.95. Чтобы получить результат расчета, нажмите кнопку «Рассчитать».
Смежные нормативные документы:
- СП 256.1325800.2016 «Электроустановки жилых и общественных зданий. Правила проектирования и монтажа»
- СП 31-110-2003 «Проектирование и монтаж электроустановок жилых и общественных зданий»
- СП 76.13330.2016 «Электротехнические устройства»
- ГОСТ 31565-2012 «Кабельные изделия. Требования пожарной безопасности»
- ГОСТ 10434-82 «Соединения контактные электрические. Классификация»
- ГОСТ Р 50571.1-93 «Электроустановки зданий»
Обозначения климатического исполнения
| В | Универсальные модели для использования на суше и в море |
| М | Приводы для эксплуатации в морском холодном или умеренном климате |
| О | Эксплуатация на суше |
| Т | Двигатели для работы в условиях тропического климата |
| ТВ | Тропический влажный климат |
| ТС | Эксплуатация в сухих тропиках |
| У | Самый популярный тип электродвигателей — для эксплуатации в умеренном климате |
| Х | Электродвигатель для работы в холодных регионах |
| ХЛ | Электродвигатели, адаптированные к холодному климату |
Размещение
| 1 | На открытой территории |
| 2 | В помещениях со свободным доступом воздуха |
| 3 | Зыкрытые помещения |
| 4 | Электродвигатель для установки в цеха, где температурно-влажсностный режим может регулироваться (есть система вентиляции, теплоснабжение) |
| 5 | Зоны повышенной влажности с высокой вероятностью образования конденсата |
Энергоэффективность
Рациональное потребление энергии при сохраняющейся высокой мощности сокращает текущие производственные затраты при одновременном увеличении производительности электродвигателя. Поэтому при выборе привода обязательно учитывается класс энергоэффективности.
В технической документации и каталогах обязательно указывается класс энергоэффективности двигателя. Он зависит от показателя КПД.
Проводимые в тестовом и рабочем режимах экспериментальные исследования показывают, что электродвигатель мощностью 55 кВт высокого класса энергоэффективности сокращает потребление электроэнергии на 8-10 тысяч кВт ежегодно.
Источник
Какой мотор-редуктор выбрать
Конфигурация агрегата зависит исключительно от условий работы и оборудования, для которого он требуется:
- Для обычных металло- и деревообрабатывающих станков можно брать синхронный двигатель и редуктор с планетарным механизмом. Такая схема мотор-редуктора выгодна и для воздушных и циркуляционных насосов.
- Для любых подъемников нужен червячной редуктор, который плавно запускает и останавливает механизм.
- Стационарным и мобильным (перфораторы) устройствам сверления-долбления для оптимальной работы потребуется цилиндрический редуктор. Работа с разным материалом требует отличной мощности.
Для вентиляторов не имеет значения схема мотор-редуктора. Ее особенность лишь влияет на качество работы:
- Червячной редуктор с плавным запуском немногим продлит срок службы механизмов вентилятора (при отсутствии свободного хода);
- Цилиндрический дает несколько режимов, следовательно, вентилятор можно эксплуатировать максимально эффективно без риска выхода из строя;
- С планетарным редуктором будет только один режим работы, однако сам агрегат будет самым дешевым вариантом.
- При учете климатического исполнения следует учитывать не только окружающую среду, но и техногенные факторы, которые могут повлиять на работу редуктора. Например, для эксплуатации возле котла пригоден только T-редуктор, рассчитанный на работу при высоких температурах.
Заказывать мотор-редуктор лучше у одного производителя:
- У поставщика могут возникнуть сложности при подборе редуктора под сторонний двигатель. Как минимум, покупка усложнится, а продавец может не дать гарантии работоспособности.
- При выборе агрегата производитель уже знает удачные и эффективные комбинации своих двигателей и редукторов. В долговечности такого устройства можно не сомневаться.
Естественно, нужно заказывать мотор-редуктор только у надежного поставщика и о покупки б/у не может идти речь.
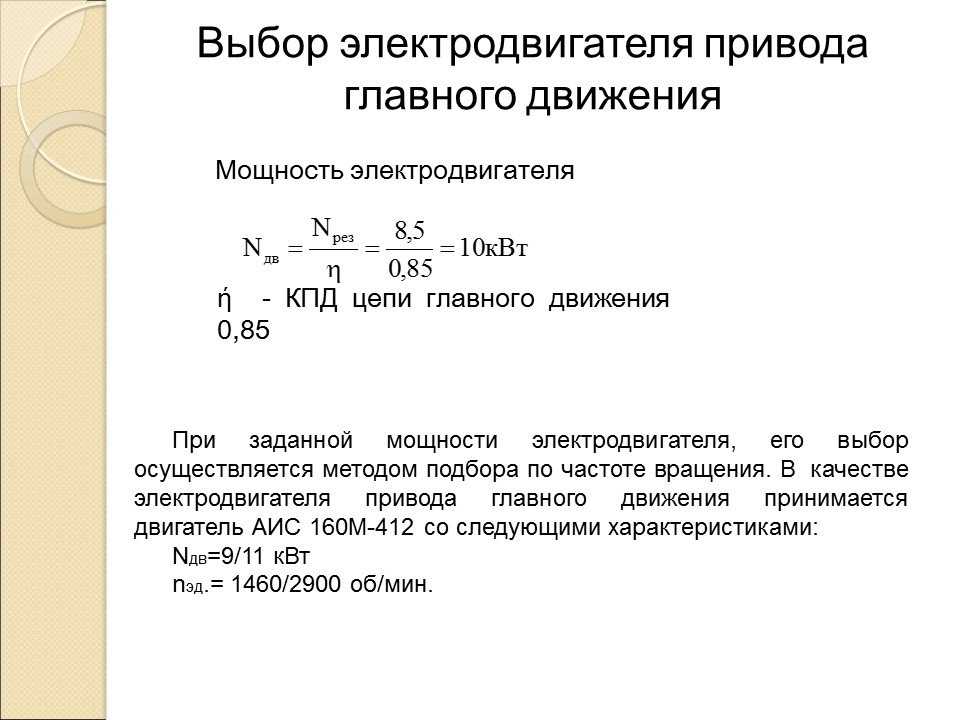
Мощность электродвигателя
Важный критерий выбора – мощность на валу, требуемая с учетом режима работы техники, к которой подключен электрический привод. Это расчетная величина, которую считают по формуле:
где:
- Р — искомая характеристика;
- Pм — мощность, потребляемая механизмом;
- ηп — паспортный коэффициент полезного действия (КПД).
По формуле определяют фактическое требуемое значение, номинал должен быть немного выше. Для наглядности разберем несколько примеров расчета мощности электродвигателя для распространенных и востребованных типов техники.
Формула расчета мощности электродвигателя для насоса
Методика выбора электродвигателя здесь использует следующую двухвариантную формулу:
, где
- P — искомая величина для привода насоса;
- k3 — относительный показатель, учитывающий необходимость небольшого запаса, принимается равным от 1,1 до 1,3;
- g — ускорение силы тяжести (свободного падения);
- Q — производительность оборудования;
- H — расчетная высота;
- y — плотность рабочей среды, которую перекачивает насосная техника при эксплуатации:
- p — уровень давления в насосе;
- ηнас — КПД подключаемого насосного оборудования;
- ηп — КПД привода.
Показатель p (давление) определяется произведением высоты подъема, ускорения свободного падения и плотности перекачиваемой жидкости.
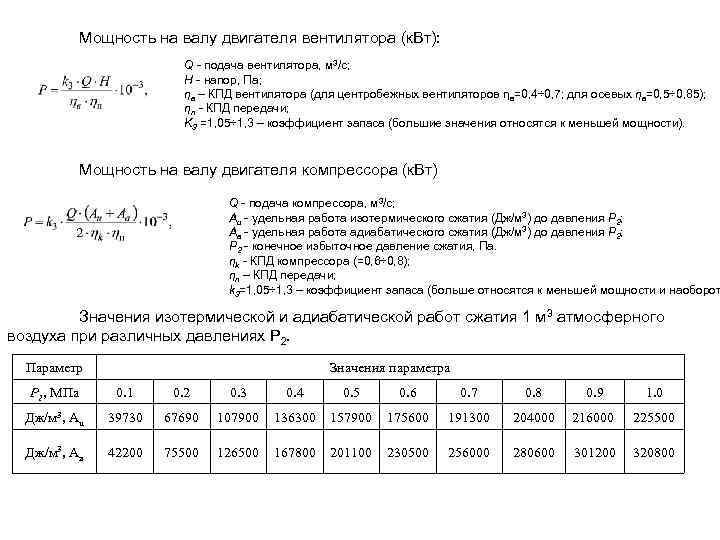
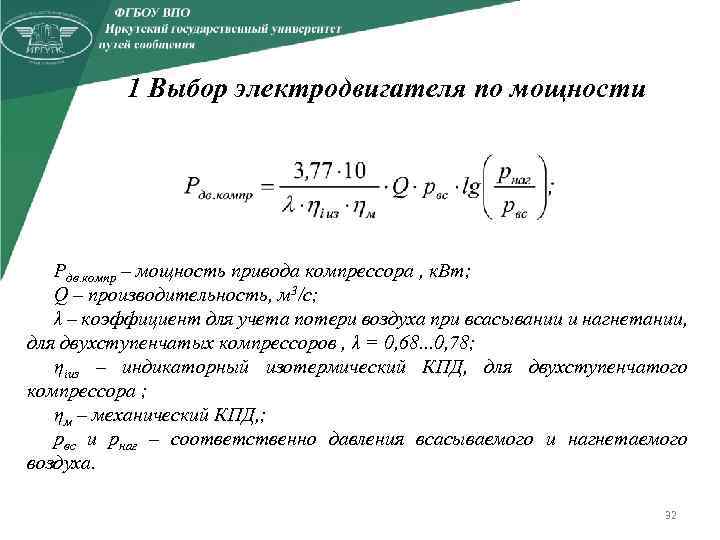
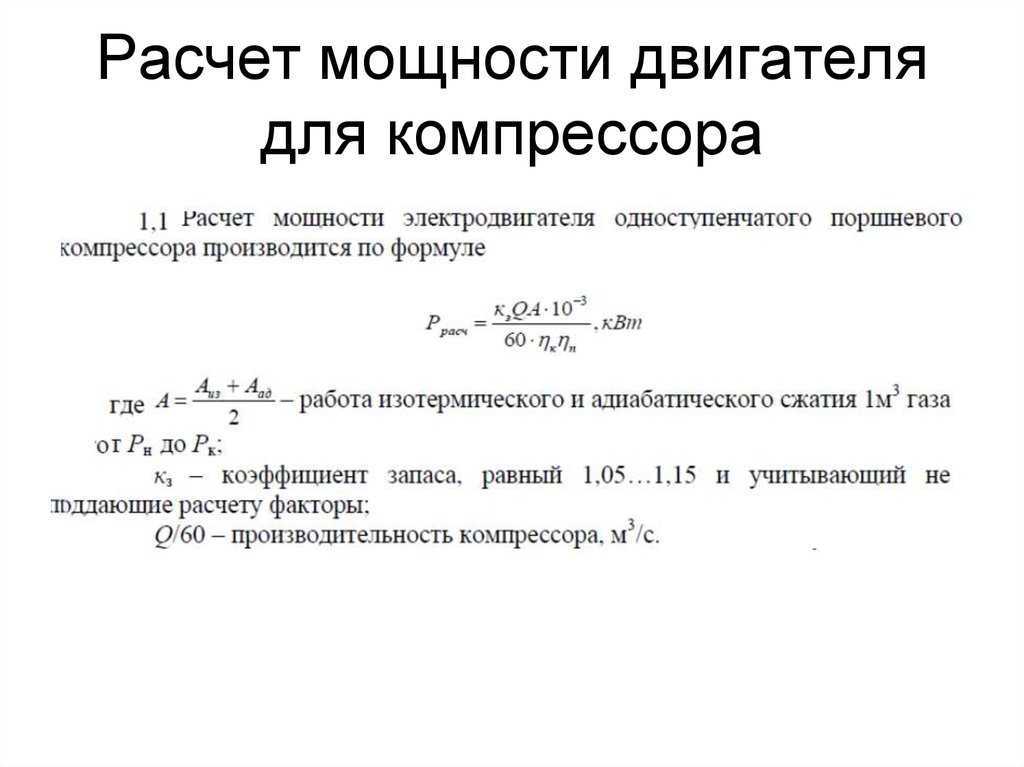
Формула расчета мощности электродвигателя для компрессора
Формула, которую обычно используют для расчета мощности электродвигателя привода компрессора, имеет такой вид:
Экспликация:
- Q — производительность компрессорной техники.
- А — усилие, требуемое для сжатия 1 кубометра воздуха до нужных значений давления, измеряется в Дж/куб. м.
- ηk — индикаторный КПД, выбирается в диапазоне значений 0,6-0,8.
- ηп — коэффициент полезного действия передачи (0,9-0,95).
- k3 — запас (5-15%, показатель принимается равным 1,05-1,15).
Значение А рассчитывается по формуле:
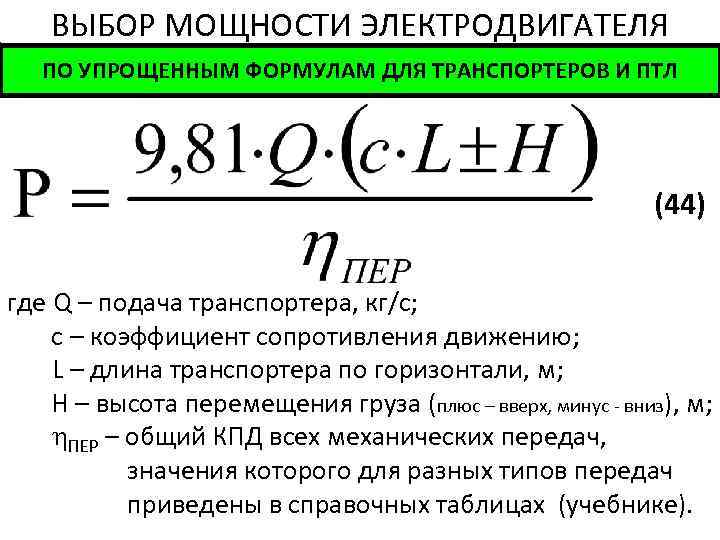
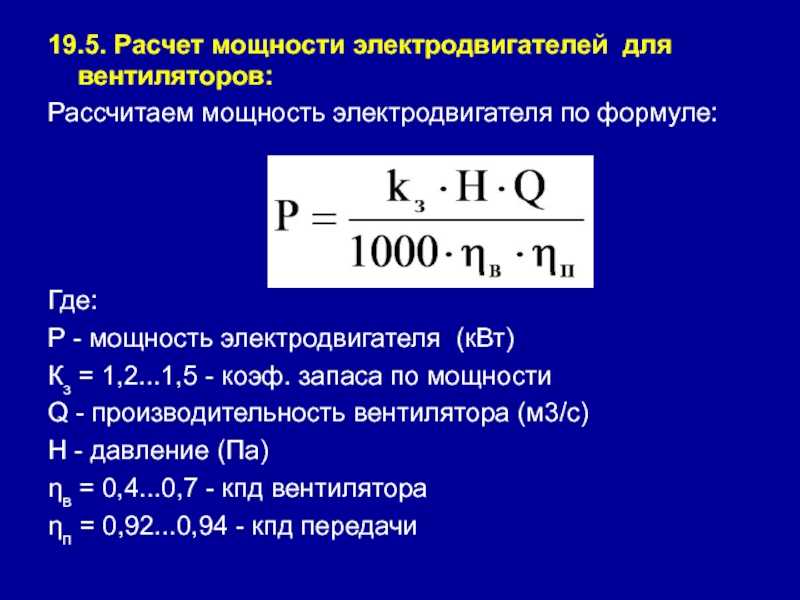
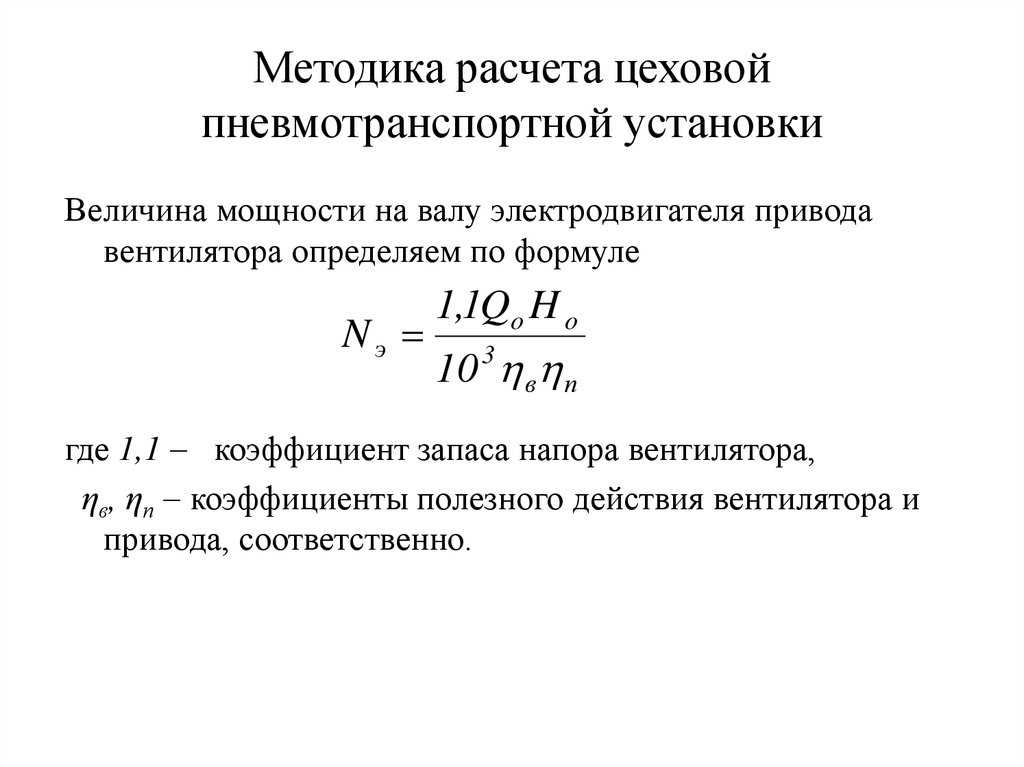
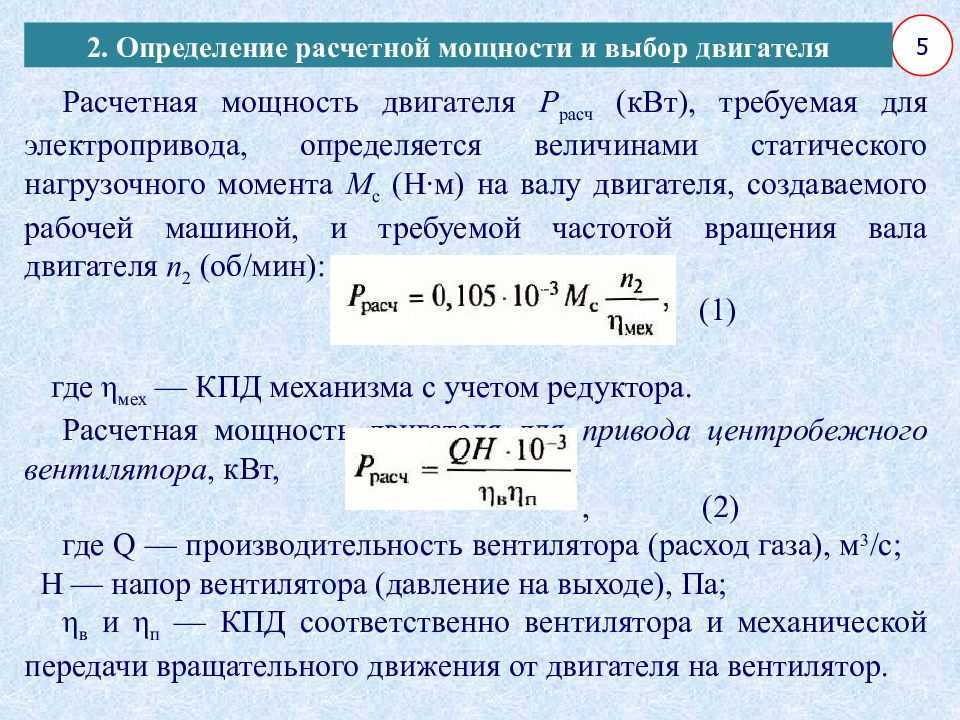
Формула расчета мощности электродвигателя для вентиляторов
При выборе электродвигателей привода осевых и центробежных вентиляторов применяется следующая формула расчета.
- Коэффициент k3 — запас, выбирается из диапазона от 1,1 до 2 в зависимости от паспортной мощности электродвигателя: k3 = 1,1-1,2 для моделей от 5 кВт и выше;
- k3 = 1,5, если это 1-2 кВт;
- для моделей до 1 кВт коэффициент принимается равным 2.
Q — производительность подключаемого оборудования.
H — уровень выходного давления.
Показатели ηв и ηп — КПД вентилятора и передачи соответственно. КПД вентилятора ηв зависит от типа оборудования, и находится в диапазоне:
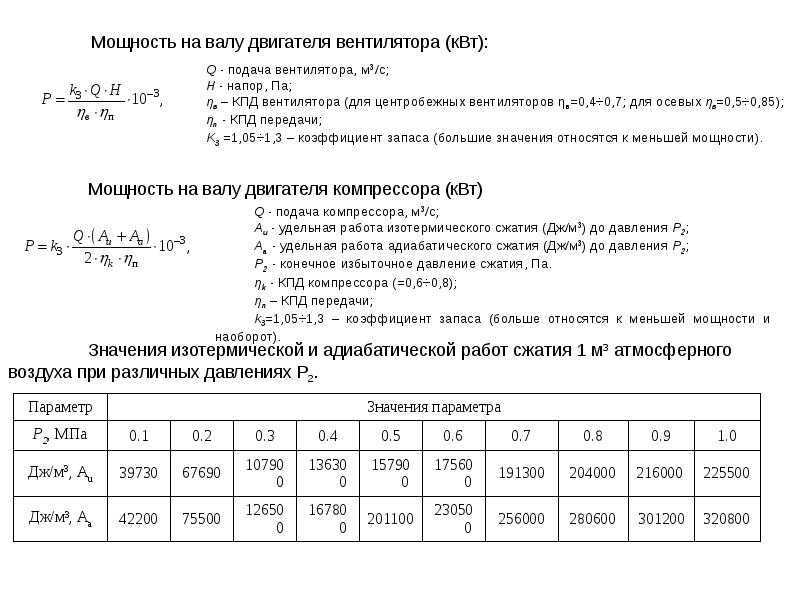

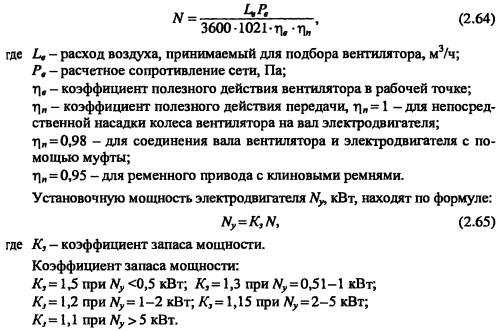


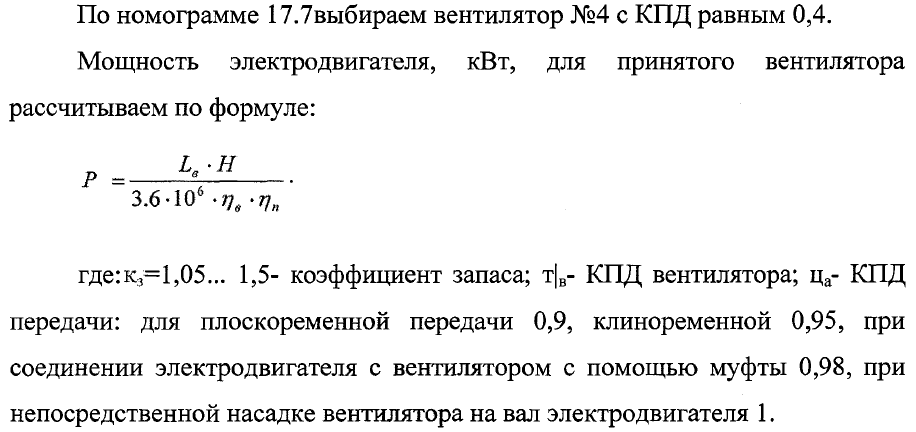
- 0,4-0,7, если это центробежная модель;
0,5-0,85, если вентилятор осевой.
Режимы эксплуатации
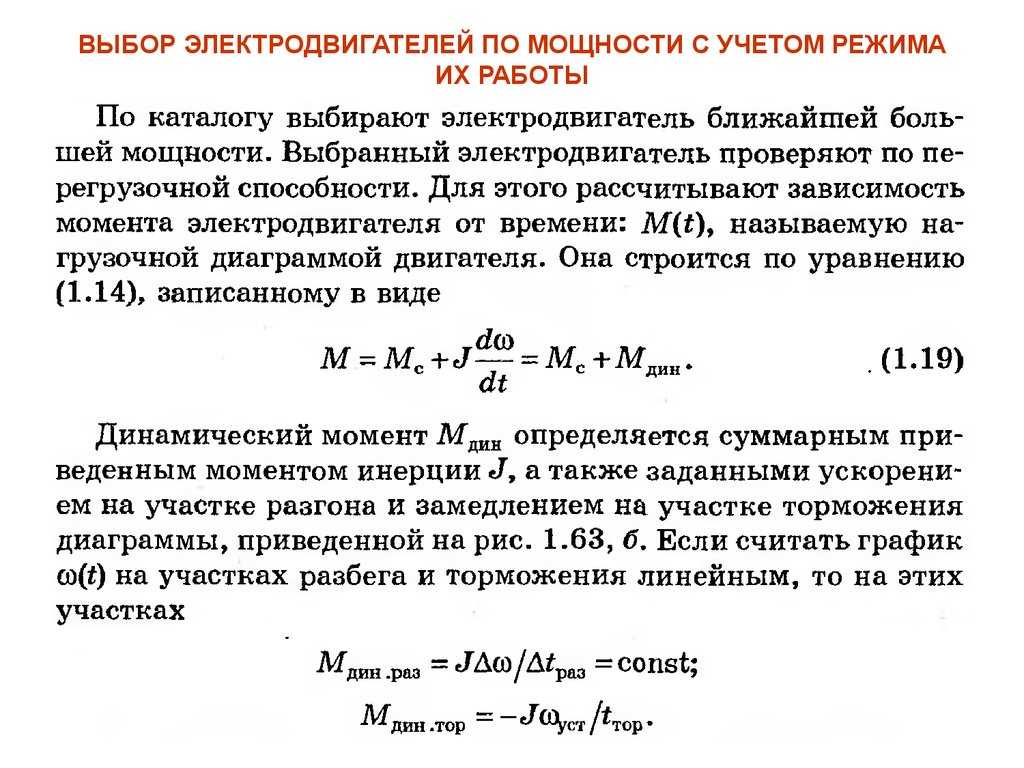
Режим эксплуатации привода задает уровень нагрузки на электрический двигатель. Она может быть константной (или почти неизменной) и меняющейся. В любом случае ее характер надо учитывать в расчетах при выборе электродвигателя. База для анализа — режимы, предусмотренные действующими стандартами. Для электрического двигателя их принято 9, обозначаются они буквой S и цифрой.
S1 — продолжительная нагрузка, постоянная на протяжении всего срока, пока внутренняя температура в корпусе не достигнет предельных значений.
S2 — кратковременный режим эксплуатации (температура за все время работы привода не достигает установленного уровня). В период простоя двигатель охлаждается до температуры окружения
При выборе электродвигателя для недлительных нагрузок важно учитывать перегрузочную способность электрического привода.
S3 — периодическая кратковременная нагрузка. В этом случае включение-выключение механизма осуществляется по некоему графику
Во время работы элементы устройства не успевают нагреться до установленных в паспорте значений, а в период остановок они полностью охлаждаются. При выборе важно учесть конкретный график — длительность остановок, потери на переходах и допустимое количество включений привода за установленную единицу времени.
S4 — кратковременный по графику с частыми запусками.
S5 — периодический краткосрочный с электроторможением. Как и в случае с режимом S4, особенности выбора электродвигателя для таких условий эксплуатации — те же, что и для S
S6 (непрерывный периодический кратковременный). Запуски чередуются с холостым ходом.
S7 (по графику с непрерывной недлительной работой и электроторможением).
S8 (периодический с непрерывной работой в короткие промежутки времени, предусматривает изменение нагрузки и частоты вращения одновременно).
S9 — непериодическая работа, меняющаяся одновременно с частотой вращения вала. К ней адаптированы большинство современных двигателей, рассчитанные на продолжительную эксплуатацию.
Расчет мощности двигателя формула для компрессора
Выбирая электродвигатель, наиболее подходящий для работы того или иного компрессора, необходимо учитывать продолжительный режим работы данного механизма и постоянную нагрузку. Расчет требующейся мощности двигателя Рдв осуществляется в соответствии с мощностью на валу основного механизма. В этом случае следует учитывать потери, возникающие в промежуточном звене механической передачи.
Дополнительными факторами являются мощности, назначение и характер производства, на котором будет эксплуатироваться компрессорное оборудование. Они оказывают определенное влияние, в связи с чем оборудование может потребовать незначительных, но постоянных регулировок для поддержки производительности на должном уровне.
Бирка (шильдик) электродвигателя
Осмотрев любой, за редким исключением, электродвигатель можно обнаружить табличку, привинченную на болты, саморезы или же заклепки. Что же написано на данном куске металла? Возьмем шильдик, заменив на нем заводской номер на название сайта.
Кстати, редко бывает, что табличка на электрооборудование находится в таком, почти идеальном состоянии. Часто данные выцветают или замазаны какой-то дрянью. Но, нам повезло. Пойдем по-порядку.
Первая строчка — число фаз и тип тока (3
), заводской номер, частота сети, форма исполнения и монтажа, класс изоляции
Вторая строчка — тип электродвигателя, косинус фи, возможные схемы соединения, номинальная частота вращения
Третья строчка — возможные номинальные напряжения, номинальная мощность, IP — степень защиты электродвигателя, масса, режим работы электродвигателя (S1).
Понятие мощности электродвигателя
Мощность – пожалуй, самый важный параметр при выборе электродвигателя. Традиционно она указывается в киловаттах (кВт), у импортных моделей – в киловаттах и лошадиных силах (л.с., HP, Horse Power). Для справки: 1 л.с. приблизительно равна 0,75 кВт.
На шильдике двигателя указана номинальная полезная (отдаваемая механическая) мощность
. Это та мощность, которую двигатель может отдавать механической нагрузке с заявленными параметрами без перегрева. В формулах номинальная механическая мощность обозначается через Р2.
Электрическая (потребляемая) мощность
двигателя Р1 всегда больше отдаваемой Р2, поскольку в любом устройстве преобразования энергии существуют потери. Основные потери в электродвигателе – механические, обусловленные трением. Как известно из курса физики, потери в любом устройстве определяются через КПД (ƞ), который всегда менее 100%. В данном случае справедлива формула:
КПД в двигателях зависит от номинальной мощности – у маломощных моделей он может быть менее 0,75, у мощных превышает 0,95. Приведенная формула справедлива для активной потребляемой мощности. Но, поскольку электродвигатель является активно-реактивной нагрузкой, для расчета полной потребляемой мощности S
(с учетом реактивной составляющей) нужно учитывать реактивные потери. Реактивная составляющая выражается через коэффициент мощности (cosϕ). С её учетом формула номинальной мощности двигателя выглядит так:
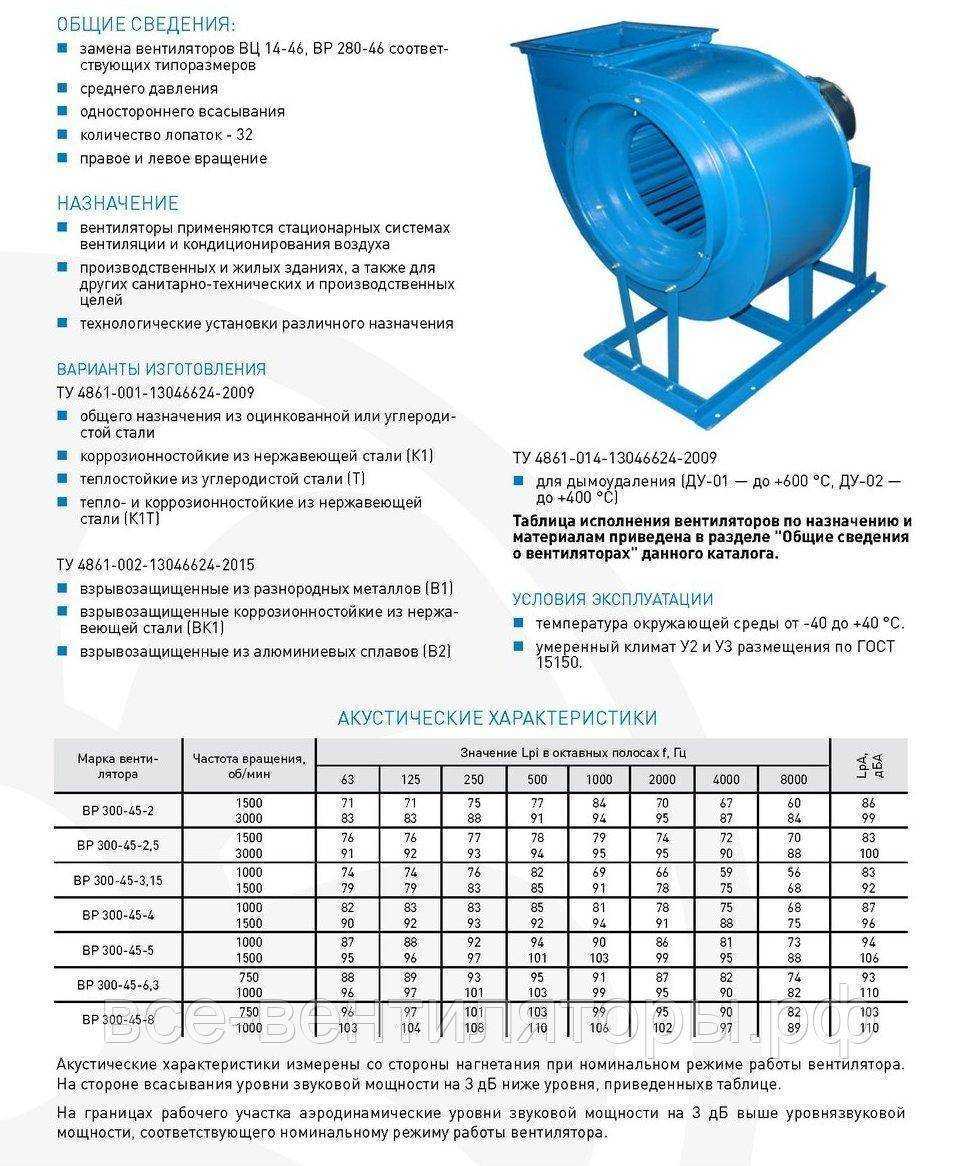
Радиальные вентиляторы
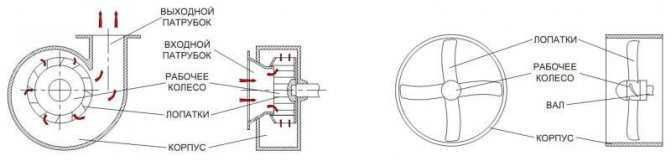
Радиальные вентиляторы прочны, способны генерировать относительно высокие давления с высокой эффективностью и подходят для эксплуатации в жестких условиях.
Радиальные вентиляторы представляют собой агрегат, состоящий из спирального корпуса, вала, рабочего колеса с лопатками и привода. Вентилятора устанавливаются на несущей раме (станине).
Спиральный корпус вентилятора чаще всего изготавливается из листов стали, которые соединены сваркой или клепками. При работе в области высокого давления корпус вентилятора отливается целиком. Для придания жесткости спиральный корпус вентилятора, изготовленный из листов стали, дополнительно усиливают поперечными полосами или оребрением. С целью уменьшения уровня шума возникающего при работе вентилятора корпус закрывают специальными шумопоглащающими панелями или заключается в короб.
Главным рабочим органом радиальных вентиляторов является рабочее колесо, в результате вращения которого и происходит перемещение рабочей среды. Обычно оно состоит из заднего и переднего дисков, ступицы и лопаток. В зависимости от условий эксплуатации существует несколько модификаций рабочего колеса:
Ступицы необходимы для крепления рабочего колеса на вал. Их отливают или вытачивают из заготовок.
Неотъемлемой частью рабочего колеса являются лопатки. Они крепятся к диску и ступице. Методы крепления лопаток напрямую зависят от требуемой прочности и жесткости конструкции, а также экономической целесообразности. Наиболее надежным способом крепления является сварка, ее применение выгодно при одинаковом сроке службы всех компонентов рабочего колеса. В случае, когда из за условий эксплуатации лопатки изнашиваются быстрее дисков, применяют соединение клепками или на шипах. От формы лопаток зависят эффективность и рабочие характеристики вентилятора.
Типы лопаток устанавливаемых на рабочее колесо:
Важным фактором, влияющим на эффективность работы вентилятора, является зазор между рабочим колесом и входным патрубком. Он не должен превышать 1% от диаметра рабочего колеса.
Привод вентилятора может быть реализован следующим образом:
Для радиальных вентиляторов используют несколько композиционных схем крепления рабочего колеса и соединения с приводом.
Основные типы электродвигателей
Существует множество типов и модификаций электродвигателей. Каждый из них обладает собственной мощностью и другими параметрами.
Основная классификация разделяет эти устройства на электродвигатели постоянного и переменного тока. Первый вариант применяется значительно реже, поскольку для его эксплуатации требуется обязательное наличие источника постоянного тока или устройства, преобразующего переменное напряжение в постоянный ток. Выполнение данного условия в современном производстве потребует значительных дополнительных затрат.

Но, несмотря на существенные недостатки, двигатели постоянного тока имеют высокий пусковой момент и стабильно работают даже при больших перегрузках. Благодаря своим качествам, эти агрегаты нашли широкое применение на электротранспорте, в металлургической и станкостроительной отрасли.
Тем не менее, большинство современного оборудования работает с двигателями переменного тока. В основе действия этих устройств лежит электромагнитная индукция, которую создает в магнитном поле проводящая среда. Магнитное поле создается с помощью обмоток, обтекаемых токами, или с применением постоянных магнитов. Электродвигатели, работающие на переменном токе, могут быть синхронными и асинхронными.
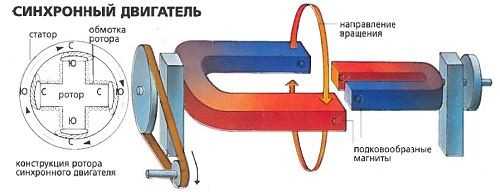
Использование синхронных электродвигателей практикуется в оборудовании, где требуется постоянная скорость вращения. Это генераторы постоянного тока, насосы, компрессоры и другие аналогичные установки. Различные модели отличаются собственными техническими характеристиками. Например, значение скорости вращения может находиться в пределах 125-1000 оборотов в минуту, а мощность достигает 10 тыс. киловатт.
Во многих конструкциях имеется короткозамкнутая обмотка, расположенная на роторе. С ее помощью, в случае необходимости, производится асинхронный пуск, после чего синхронный двигатель продолжает работу в обычном режиме, максимально сокращая потери электрической энергии. Эти двигатели отличаются небольшими размерами и высоким коэффициентом полезного действия.

Гораздо более широкое распространение в производственной сфере получили асинхронные двигатели переменного тока. Они отличаются очень высокой частотой вращения магнитного поля, значительно превышающей скорость вращения ротора. Существенным недостатком этих устройств считается снижение КПД до 30-50% от нормы при низких нагрузках. Кроме того, во время пуска параметры тока становятся в несколько раз больше по сравнению с рабочими показателями. Данные проблемы устраняются путем использования частотных преобразователей и устройств плавного пуска.
Асинхронные двигатели используются на тех объектах, где требуются частые включения и выключения оборудования, например, в лифтах, лебедках, и других устройствах.
Пример подбора стабилизатора по мощности
Стабилизатор приобретается для одновременной защиты трех однофазных потребителей
Не будем акцентировать внимание на конкретном виде устройств, назовем их просто: потребитель 1, потребитель 2 и потребитель 3
Согласно заводским паспортам:
- номинальная мощность потребителя 1 составляет 600 Вт, потребителя 2 – 130 Вт, потребителя 3 – 700 Вт;
- коэффициент мощности потребителей 1 и 2 равен 0,7, потребителя 3 – 0,95.
Определяем мощность нагрузки. Пусть потребитель 1 относится к категории оборудования, характеризующегося наличием высоких пусковых токов. При расчёте используем не его номинальную мощность, а максимальную – пусковую, равную согласно технической документации 1800 Вт. Используя вышеуказанную формулу, переведём мощность каждого потребителя из Вт в ВА:







- 1800 / 0,7 = 2571,4 ВА – для потребителя 1;
- 130 / 0,7 = 185,7 ВА – для потребителя 2;
- 700 / 0,95 = 736,8 ВА – для потребителя 3.
Теперь определим суммарную потребляемую мощность планируемой нагрузки в Вт и ВА:
- 1800 + 130 + 700 = 2630 Вт;
- 2571,4 + 185,7 + 736,8 = 3493,9 ВА.
Дальнейший выбор стабилизатора будем проводить, учитывая, что полная мощность нагрузки на устройство составит 3493,9 ВА, а активная – 2630 Вт (обратите внимание на разницу значений в Вт и ВА). Далее определяем запас мощности
Примем рекомендованную величину запаса мощности в 30% от энергопотребления нагрузки – для получения численного значения необходимого запаса умножим на 0,3 ранее рассчитанные суммарные мощности планируемой нагрузки:
Далее определяем запас мощности. Примем рекомендованную величину запаса мощности в 30% от энергопотребления нагрузки – для получения численного значения необходимого запаса умножим на 0,3 ранее рассчитанные суммарные мощности планируемой нагрузки:
- 2630 х 0,3 = 789 Вт – запас активной мощности;
- 34,939 х 0,3 = 1048,17 ВА – запас полной мощности.
Следовательно мощность нагрузки с учётом запаса составит:
- 2630 + 789 = 3419 Вт;
- 3493,9 + 1048,17 = 4542,07 ВА.
Теперь выберем модели однофазного стабилизатора с необходимой мощностью для электропитания нашей нагрузки (с учетом запаса), используя стандартный мощностной ряд однофазных инверторных стабилизаторов производства ГК «Штиль»:
| Полная мощность, ВА | Активная мощность, Вт |
| 350 | 300 |
| 550 | 400 |
| 800 | 600 |
| 1000 | 800 |
| 1500 | 1125 |
| 2000 | 1500 |
| 2500 | 2000 |
| 3000 | 2500 |
| 3500 | 2750 |
| 5000 | 4500 |
| 7000 | 5500 |
| 8000 | 7200 |
| 10000 | 9000 |
| 12000 | 11000 |
| 15000 | 13500 |
| 20000 | 18000 |
Ближайшая с большей стороны к расчётным значениям мощность – 5000 ВА и 4500 Вт, следовательно, именно такой стабилизатор подходит для подключения потребителя 1, потребителя 2 и потребителя 3.
Предположим, что потребителя 1, потребителя 2 и потребителя 3 необходимо подключить не к однофазному, а к трехфазному стабилизатору. Стандартный мощностной ряд ГК «Штиль» для подобных устройств следующий:
| Полная мощность, ВА | Активная мощность, Вт |
| 6000 | 5400 |
| 10000 | 8000 |
| 15000 | 13500 |
| 20000 | 16000 |
Нагрузку со значением полной мощности в 4542,07 ВА и активной – в 3419 Вт, возможно подключить к одной фазе трехфазного стабилизатора с выходной мощностью 15000 ВА / 13500 Вт, в котором отдельная фаза выдаст максимально – 5000 ВА / 4500 Вт.
Выбрать менее мощную модель стабилизатора позволит распределение нагрузки, то есть подключение каждого потребителя к отдельной фазе. Наибольшая нагрузка будет на фазе, питающей потребитель 1, энергопотребление которого – 1800 Вт / 2571,4 ВА.
Рассчитаем необходимый потребителю 1 запас мощности (примем рекомендованное значение запаса в 30%):
- 1800 х 0,3 = 540 Вт – запас активной мощности;
- 2571,4 х 0,3 = 771,4 ВА – запас полной мощности;
- 1800 + 540 = 2340 Вт – активная мощность потребителя 1 с учётом запаса;
- 2571,4 + 771,4 = 3342,8 ВА – полная мощность потребителя 1 с учётом запаса.
Значит, максимально возможная нагрузка на одну фазу стабилизатора при условии подключения трех потребителей к различным фазам может составить: 3342,8 ВА / 2340 Вт.
Выберем модель стабилизатора с выходной мощностью 10000 ВА / 8000 Вт, в которой допустимая нагрузка на одну фазу приблизительно равна 3333 ВА / 2666 Вт. В данном случае допустимо выбрать стабилизатор с полной мощностью чуть меньшей, чем расчётная – фактически это снизит запас по мощности для потребителя 1 на 1-2%.
Обратите внимание!
Существуют стабилизаторы топологии «3 в 1», то есть с трехфазным входом и однофазным выходом. Подобная схема позволяет равномерно нагрузить трехфазную сеть при подключении однофазной нагрузки.
Обоснованный выбор электродвигателя по мощности
Выбор электродвигателя по мощности зависит от специфики эксплуатации оборудования, к которому он подключается. Нагрузки оценивают по номинальному режиму и изменениям величины мощности потребления. При этом расчетная величина должна обеспечивать работу электродвигателя:
- с нормальным нагревом;
- достаточным пусковым моментом;
- перегрузочной способностью в установленных пределах.
Правильным будет считаться выбор электродвигателя по мощности, при которой он, принимая нагрузки, предусмотренные техническим процессом, будет нагреваться не выше допустимой температуры для каждой из основных частей сборки. Неправильный выбор — с большим запасом ресурса, который ведет к недоиспользованию производительности, а значит, и переплатам за обслуживание более дорогой модели, ее ремонт, сниженные относительные показатели работы (включая КПД).