
Основные характеристики двигателя
Каждый двигатель рассчитывается под определенные требования и имеет следующие основные характеристики:
-
Режим работы
на который рассчитан двигатель: длительный или кратковременный. Длительный
режим работы подразумевает, что двигатель может работать часами. Такие двигатели рассчитываются таким образом, чтобы теплоотдача в окружающую среду была выше тепловыделения самого двигателя. В этом случае он не будет разогреваться. Пример: вентиляция, привод эскалатора или конвейера. Кратковременный –
подразумевает, что двигатель будет включаться на короткий период, за который не успеет разогреться до максимальной температуры, после чего следует длительный период, за время которого двигатель успевает остыть. Пример: привод лифта, электробритвы, фены. -
Сопротивление обмотки двигателя
. Сопротивление обмотки двигателя влияет на КПД двигателя. Чем меньше сопротивление, тем выше КПД. Измерив сопротивление, можно выяснить наличие межвиткового замыкания в обмотке. Сопротивление обмотки двигателя составляет тысячные доли Ома. Для его измерения требуется специальный прибор или специальная методика измерения. -
Максимальное рабочее напряжение
. Максимальное напряжение, которое способна выдержать обмотка статора. Максимальное напряжение взаимосвязано со следующим параметром. -
Максимальные обороты
. Иногда указывают не максимальные обороты, а Kv –
количество оборотов двигателя на один вольт без нагрузки на валу. Умножив этот показатель на максимальное напряжение, получим максимальные обороты двигателя без нагрузки на валу. -
Максимальный ток
. Максимально допустимый ток обмотки. Как правило, указывается и время, в течение которого двигатель может выдержать указанный ток. Ограничение максимального тока связано с возможным перегревом обмотки. Поэтому при низких температурах окружающей среды реальное время работы с максимальным током будет больше, а в жару двигатель сгорит раньше. -
Максимальная мощность двигателя.
Напрямую связана с предыдущим параметром. Это пиковая мощность, которую двигатель может развить на небольшой период времени, обычно – несколько секунд. При длительной работе на максимальной мощности неизбежен перегрев двигателя и выход его из строя. -
Номинальная мощность
. Мощность, которую двигатель может развивать на протяжении всего времени включения. -
Угол опережения фазы (timing)
. Обмотка статора имеет некоторую индуктивность, которая затормаживает рост тока в обмотке. Ток достигнет максимума через некоторое время. Для того, чтобы компенсировать эту задержку переключение фаз выполняют с некоторым опережением. Аналогично зажиганию в двигателе внутреннего сгорания, где выставляется угол опережения зажигания с учетом времени воспламенения топлива.
Так же следует обратить внимание на то, что при номинальной нагрузке Вы не получите максимальных оборотов на валу двигателя. Kv
указывается для не загруженного двигателя
При питании двигателя от батарей следует учесть “проседание” питающего напряжения под нагрузкой, что в свою очередь также снизит максимальные обороты двигателя.
Принцип действия которого основан на частотном регулировании и самосинхронизации получил название бесколлекторного двигателя. В данной конструкции, вектор магнитного поля статора управляется относительно положения ротора. Бесколлекторный двигатель был создан для того, чтобы улучшить свойства стандартных коллекторных электродвигателей постоянного тока.
Он органично соединил в себе самые лучшие качества двигателей постоянного тока и бесконтактных электродвигателей.
Принцип работы бесколлекторного электродвигателя
Вращение двигателя осуществляется путем смены направления магнитного поля в обмотках ротора в определенной последовательности. В этом случае, постоянные магниты взаимодействуют с магнитными полями ротора и приводят в движение подвижный статор. В основе этого движения лежит основное свойство магнитов, когда одноименные полюса отталкиваются, а разноименные — притягиваются.
Управление магнитными полями в обмотках ротора и их сменой, происходит с помощью контроллера. Он представляет собой достаточно сложное устройство, способное коммутировать высокие токи с большой скоростью. Контроллер обязательно имеет в своей схеме бесколлекторный электродвигатель, что в значительной степени удорожает его использование.
В бесколлекторных электродвигателях отсутствуют какие-либо вращающиеся контакты и любые контакты, способные переключаться. В этом состоит их главное преимущество перед обычными электродвигателями, поскольку все потери от трения сведены к минимуму.
Немного из истории:
Главная проблема всех двигателей — это перегревание. Ротор вращался внутри какого-нибудь статора, и поэтому тепло от перегрева никуда не уходило. Людям пришла в голову гениальная идея: вращать не ротор, а статор, который при вращении охлаждался бы воздухом. Когда создали такой двигатель, он стал широко использоваться в авиации и судостроении, и поэтому его прозвали Вентильным двигателем.
Вскоре был создан электрический аналог вентильного двигателя. Назвали его бесколлекторным мотором, потому что у него не было коллекторов (щеток).
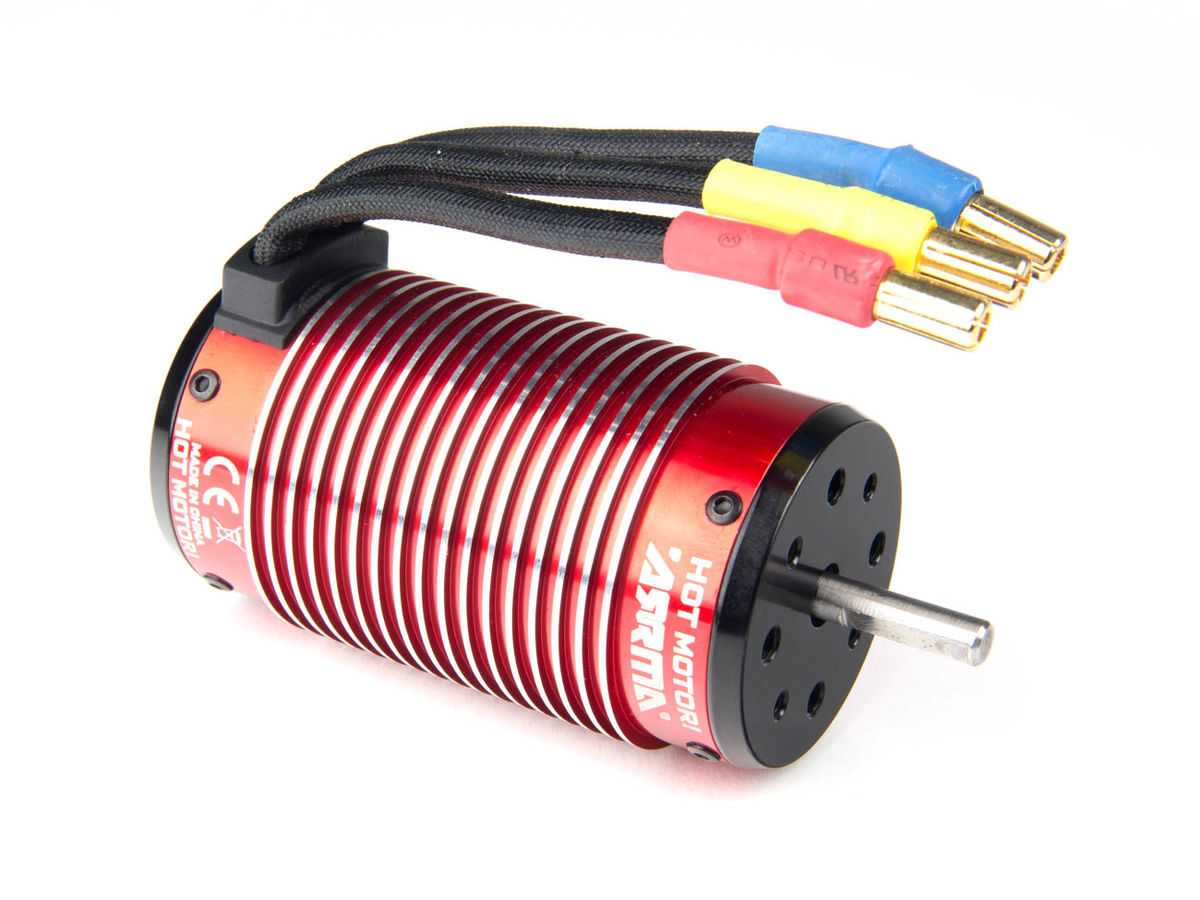
Бесколлекторный двигатель.
Бесколлекторные (brushless англ.) электродвигатели пришли к нам сравнительно недавно, в последние 10-15 лет
. В отличие от коллекторных моторов они питаются трехфазным переменным током. Бесколлекторные двигатели эффективно работают в более широком диапазоне оборотов и имеют более высокий КПД
. Конструкция двигателя при этом относительно проще, в ней нет щеточного узла, который постоянно трется с ротором и создает искры. Можно сказать, что бесколлекторные моторы практически не изнашиваются. Стоимость бесколлекторных двигателей несколько выше, чем коллекторных. Это вызвано тем, что все бесколлекторные моторы снабжены подшипникам и, как правило, изготовлены более качественно.
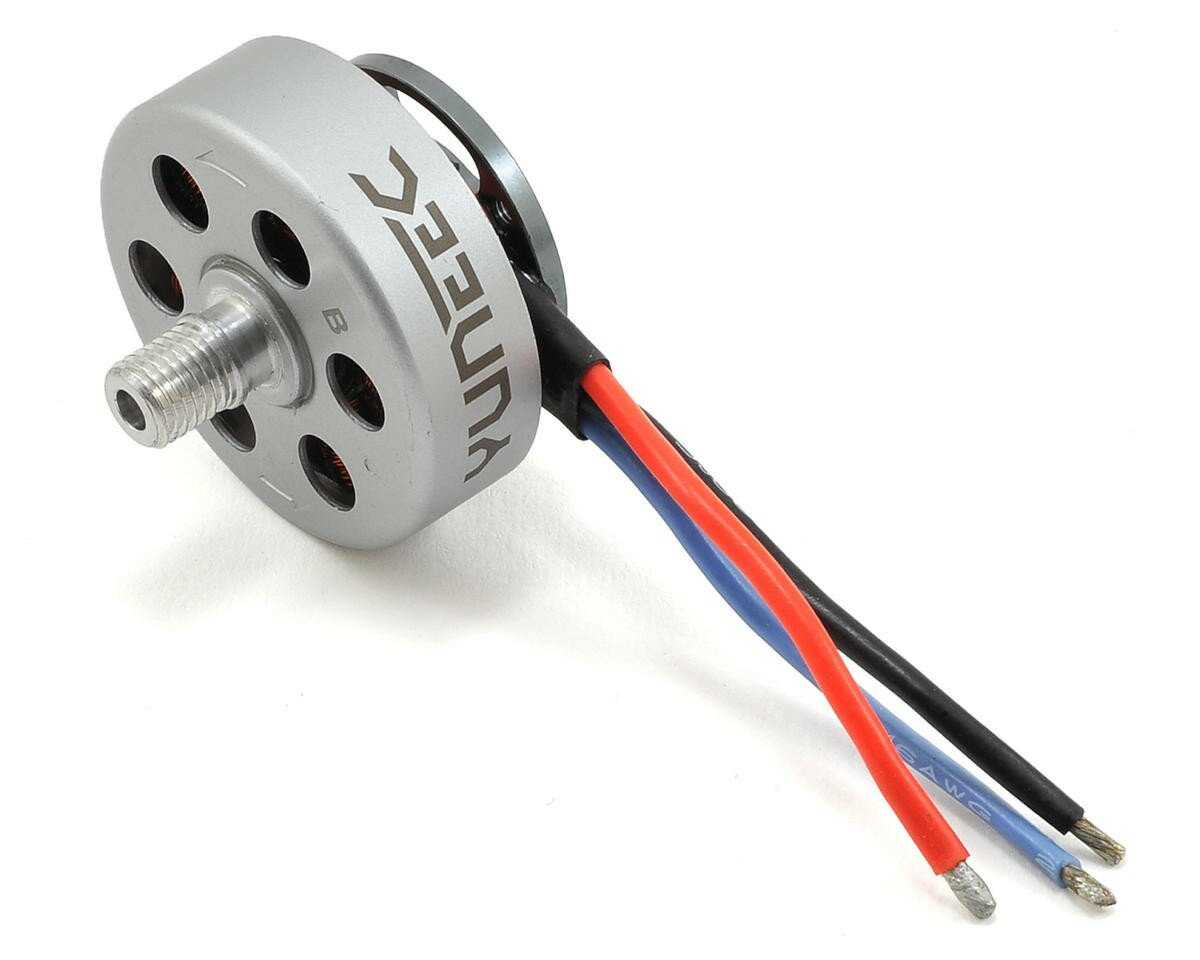
Испытания показали:
Тяга с винтом 8х6 = 754 грамма
,Частота вращения = 11550 об/мин
,Потребляемая мощность = 9 ватт
(без винта), 101 ватт
(с винтом),
Мощность и КПД
Мощность можно вычислить вот таким способом:1) Мощность в механике вычисляется по такой формуле: N= F*v
, где F — сила, а v — скорость. Но так как, винт находится в статическом состояние, то движения нет, кроме вращательного. Если этот мотор установить на авиамодель, то можно было бы замерить скорость (она равна 12 м/с) и посчитать полезную мощность:N полез= 7.54*12= 90.48 ватт
2) КПД электрического двигателя находится по такой формуле: КПД= N полезной/N затраченной *100%
, где N затрат= 101 ватт
КПД= 90.48/101 *100%= 90%
В среднем КПД бесколлекторных двигателей реально и колеблется около 90% (самый большой КПД достигнутый данным видом моторов равен 99.68%
)
Характеристики двигателя:
Напряжение: 11.1 вольт
Обороты: 11550 об/мин
Максимальная сила тока: 15А
Мощность: 200 ватт
Тяга: 754 грамм (винт 8х6)
Заключение:
Цена любой вещи зависит от масштабов ее производства. Производители бесколлекторных моторов множатся, как грибы после дождя. Поэтому хочется верить, что в скором будущем цена на контроллеры и бесколлекторные двигатели упадет, как упала она на аппаратуру радиоуправления… Возможности микроэлектроники с каждым днем все расширяются, размеры и вес контроллеров постепенно уменьшаются. Можно предположить, что в скором будущем контроллеры начнут встраивать прямо в двигатели! Может, мы доживем до этого дня…






Наверняка у каждого новичка, который впервые связал свою жизнь с электромоделями на радиоуправлении, после тщательного изучения начинки, появляется вопрос. Что такое коллекторный и ? Какой из них лучше поставить на свою радиоуправляемую электромодель?
Коллекторные моторы, которые так часто используются для приведения в движение электромоделей на радиоуправлении, имеют всего два исходящих питающих провода. Один из них «+» другой « — ». В свою очередь они подключаются к регулятору скорости вращения. Разобрав коллекторный мотор, вы всегда там найдете 2 магнита изогнутой формы, вал совместно с якорем, на который намотана медная нить (проволока), где по одну сторону вала стоит шестерня, а по другую сторону располагается коллектор, собранный из пластин, в составе которых чистая медь.
Основные отличия от обычных двигателей
Бесколлекторный двигатель нередко используются в радиоуправляемых моделях летательных аппаратов. Их выдающиеся характеристики и живучесть получили широкую популярность, благодаря отсутствию трущихся деталей в виде щеток, которые осуществляют передачу тока.
Для того, чтобы более полно представить разницу, нужно вспомнить, что в стандартном коллекторном электродвигателе происходит вращение ротора с обмотками внутри статора, основой которого служат постоянные магниты. Коммутация обмоток производится с помощью коллектора, в зависимости от положения ротора. В электродвигателе переменного тока, наоборот, ротор с магнитом вращается внутри статора с обмотками. Примерно такую же конструкцию имеет двигатель.
В отличие от стандартных двигателей, в бесколлекторном в качестве подвижной части выступает статор, в котором размещены постоянные магниты, а роль неподвижной части играет ротор с трехфазными обмотками.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД более 90 %)
Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
- Относительно сложная система управления двигателем
- Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
- Во многих случаях более рациональным оказывается применение асинхронного двигателя с преобразователем частоты .
Для применений, комбинирующих максимально достижимый КПД с предельно простыми и надёжными блоками управления (ключевой коммутатор, не использующий ШИМ), можно также выделить следующую особенность: Несмотря на то, что обороты могут широко варьироваться управляющим блоком, приемлемый КПД можно получить лишь в относительно узком интервале угловых скоростей. Это определяется индуктивностью обмоток. Если скорость будет ниже оптимальной, продолжающаяся подача тока в данную фазу, после достижения предела магнитного потока, будет приводить лишь к ненужному нагреву. На скоростях выше оптимальной, магнитный поток в полюсе не достигнет максимума из-за ограниченного индуктивностью времени нарастания тока. Примерами таких двигателей являются модельные бесколлекторные комплекты. Они должны быть эффективными, лёгкими и надёжными, а для того чтобы обеспечить оптимальную угловую скорость при заданной нагрузочной характеристике, производители выпускают модельные ряды с различными индуктивностями (числом витков) обмоток. При этом, меньшее число витков соответствует более быстроходному двигателю.
Высокочастотные двигатели
Указанные модификации наиболее востребованными считаются для резонансных электроприводов. В промышленности такие модели встречаются довольно часто. Датчики у них устанавливаются как электронного, так индуктивного типа. При этом катушки чаще всего имеются на внешней стороне пластины. Роторы монтируют как в горизонтальном, так и вертикальном положении.
Непосредственно изменение частотности у таких устройств осуществляется через контроллеры. Устанавливаются они, как правило, со сложной контактной системой. Непосредственно стартеры используются только двойного типа. В свою очередь, системы управления зависят от мощности бесколлекторного устройства.
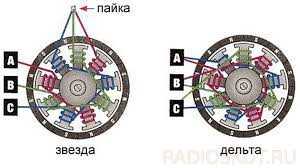
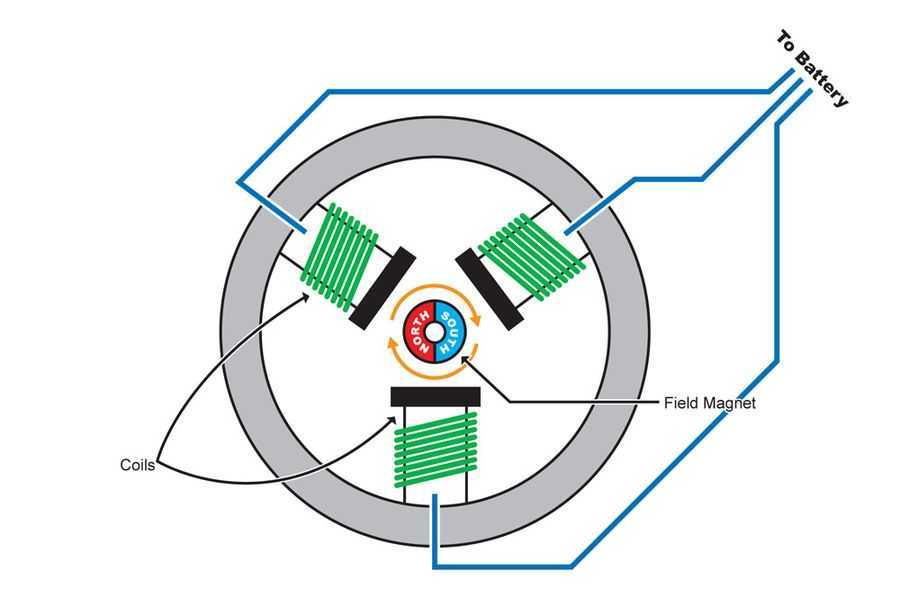
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
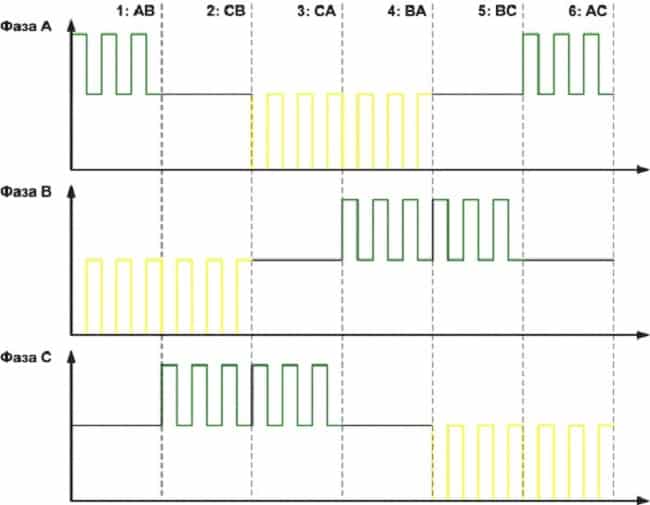
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» – отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» – положительный, «А» – отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
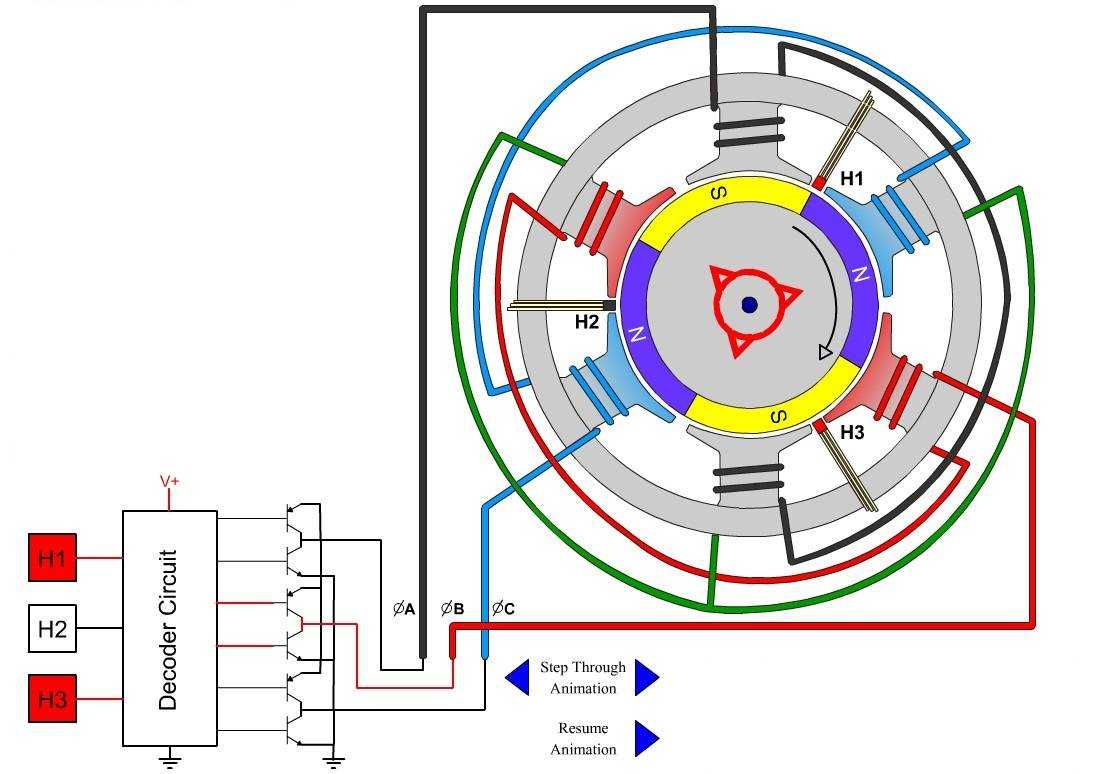
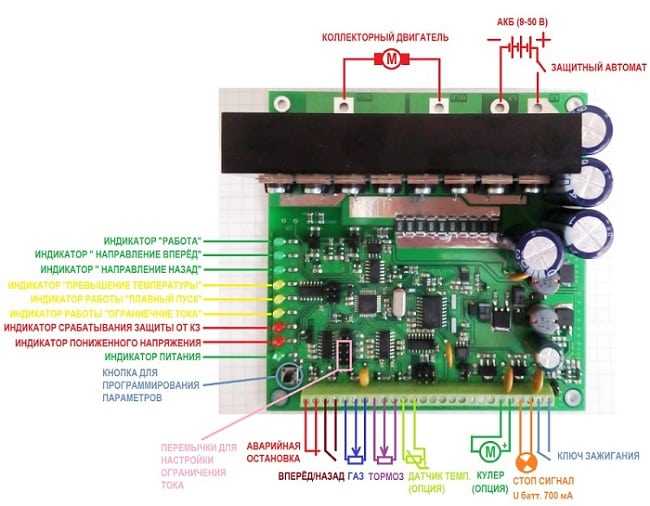
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Принцип работы ВД
Принцип работы ВД основан на том, что контроллер ВД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был ортогонален вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) контроллер управляет током, протекающим через обмотки ВД, т.е. вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Коммутация производится так, что поток возбуждения ротора — Ф 0
поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M
, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Принцип работы коллекторного мотора
Электрический ток (DC или direct current), поступая на обмотки якоря (в зависимости от их количества на каждую по очереди) создает в них электромагнитное поле, которое с одной стороны имеет южный полюс, а с другой стороны северный.
Многие знают, что, если взять два любых магнита и приставить их одноименными полюсами
друг другу, то они не за что не сойдутся, а если приставить разноименными, то они прилипнут так, что не всегда возможно их разъединить.
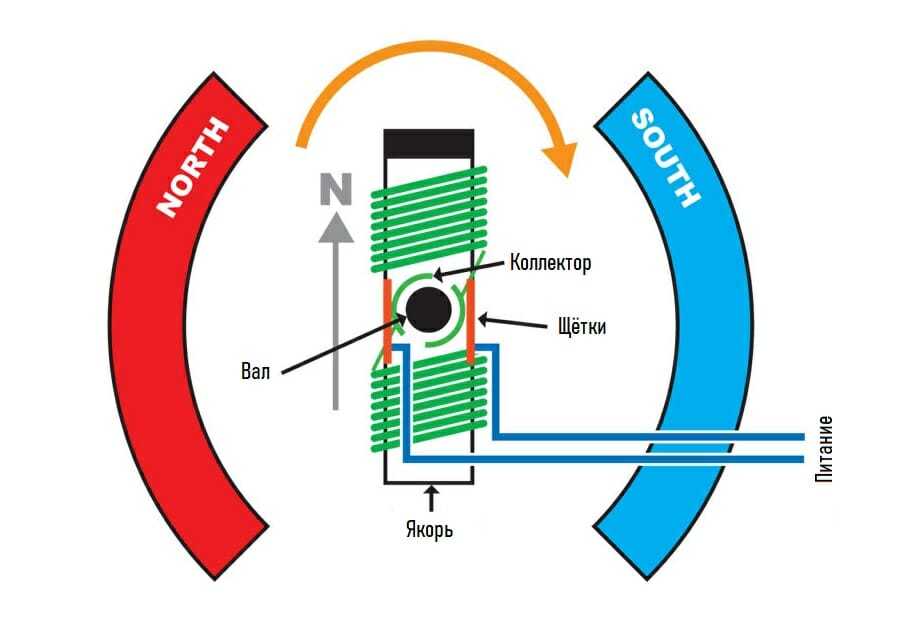
Так вот, это электромагнитное поле, которое возникает в любой из обмоток якоря, взаимодействуя с каждым из полюсов магнитов статора, приводит в действие (вращение) сам якорь. Далее ток, через коллектор и щетки переходит к следующей обмотке и так последовательно, переходя от одной обмотки якоря к другой, вал электродвигателя совместно с якорем вращается, но лишь до тех пор, пока к нему подается напряжение.








О векторном управлении
Развитие наибольшего момента двигателя возможно только при условии ротора, перпендикулярно расположенного к вектору тока.
При создании системы на микроконтроллере мы все хотим, что при минимальных активных потерях двигатель выдавал максимальный момент. Потери – это электроток в обмотках. Логичнее всего в такой ситуации установить вектор фазного электротока так, чтобы он был постоянно перпендикулярным относительно магнита.
Говоря иначе, нужно все перевернуть с ног на голову: ротор продолжит вращение, но двигаться по направлению к вектору уже не будет. Мы прикрепим вектор к ротору.
Регулировать момент бесколлекторного привода можно через электротоковую амплитуду. Увеличение момента будет следствием роста амплитуды.
Вращение тока в обмотках и его частота нам уже не интересны. Как ротор начнет вращение, так оно и будет продолжаться. Мы управляем моментом на валу ротора.
Это, собственно, принцип векторного управления. Именно его чаще всего описывают в литературе. Мы управляем вектором электротока в статоре, т.е. заставляем его занять позицию, в которой он будет перпендикулярным роторным магнитам.
Где применяют бесколлекторные двигатели постоянного тока
Высокий КПД бесколлекторных двигателей, высокая удельная мощность, возможность работы на высокой скорости, долговечность и низкая цена – причина, по которой сегодня эти моторы широко распространены в России и по всему миру. К тому же, стремительное развитие технической отрасли, в которой используют полупроводники, сделала и без того бюджетные, небольшие, но мощные контроллеры еще более доступными. А без них, напомним, работа таких движков невозможна.
 Отличия между двигателями
Отличия между двигателями
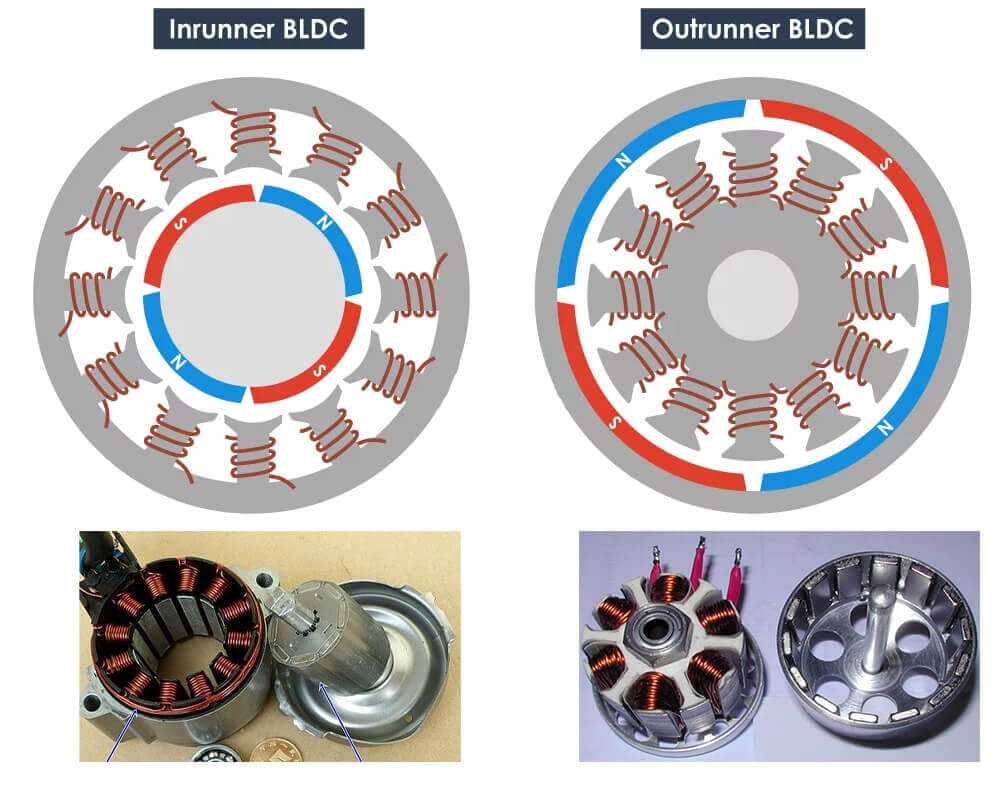
Логично применять бесколлекторные машины там, где их использование будет давать наиболее результативные показатели относительно других электромоторов. Например, на тех производствах, которые требуют совершения тысяч оборотов за минуту. Когда рассчитывается, что машина прослужит долго, а особенности изделия затрудняют проведение ремонта, бесколлекторный двигатель будет преимуществом.
Моторы типа Inrunner чаще используют в охлаждающих системах или силовых установках дронов. Одним словом там, где важна высокая скорость работы.
А вот Outrunner уместен там, где на первый план выходит точное позиционирование, что характерно для робототехники и медицины.
Бесколлекторные двигатели применяют в нефтедобывающей промышленности, когда оборудование находится под водой, в производстве автомобилей, в отопителях, для моделей машинок, в торцовочных пилах с протяжкой. Их также используют для моделей кораблей, для автомоделей и ставят в машинки на радиоуправлении.
Бесколлекторные тяговые двигатели применяют для приведения в движение транспортных средств, работающих на электричестве.
Для мотоблоков, культиваторов и газонокосилок используют эл. двигатели с редуктором.
Можно ли использовать БД в качестве генератора? Ответ – да. Генератор из привода можно собрать по одной из схем на изображении ниже.

Практически во всех вышеперечисленных приборах применяются приводы мощностью до 10 кВт.
Так как величина напряжения бытовой сети составляет 220В, все двигатели этих устройств также имеют возможность подключатся на 220 В.
Как выбрать подходящий мотор?
Чтобы понять, как выбрать нужный вам мотор, важно разобрать информацию на шильде
Обратите внимание на:
- Значение максимального тока, которое выдерживают обмотки в течение небольшого временного отрезка. Это означает, что превышение этого времени, двигатель рано или поздно сломается.
- Величина максимального напряжения. Та же ситуация, что и с током: какое напряжение обмотки выдерживают в течение короткого отрезка времени.
- KV — сколько раз мотор оборачивается на вольт. Значение KV зависит только от нагрузки на вал электромотора. На двигателе его указывают для холостого хода (при отсутствии какой-либо нагрузки вообще).
- КПД машины прямо зависит от величины сопротивления. Чем оно меньше, тем больше будет коэффициент.
Если нужно провести расчет каких-либо показателей, вы можете использовать онлайн калькулятор для БД.



Преимущества бесколлекторного двигателя
По сравнению со своими коллекторными «собратьями» бесколлекторные механизмы обладают некоторыми преимуществами:
- Компактность и небольшой вес. Двигатели можно установить на маленькие устройства.
- Очень высокий КПД. Их использование выгодно.
- Отсутствие контактов переключения и крутящего момента. Поскольку функции постоянных магнитов выполняют транзисторы МОП, источники потерь отсутствуют.
- Отсутствие стирающихся и ломающихся элементов.
- Широкий диапазон изменения скорости вращения.
- Способность переносить большую нагрузку по моменту.
Бесколлекторный двигатель оснащается электронным блоком управления, который стоит достаточно дорого – это, пожалуй, единственный его недостаток.
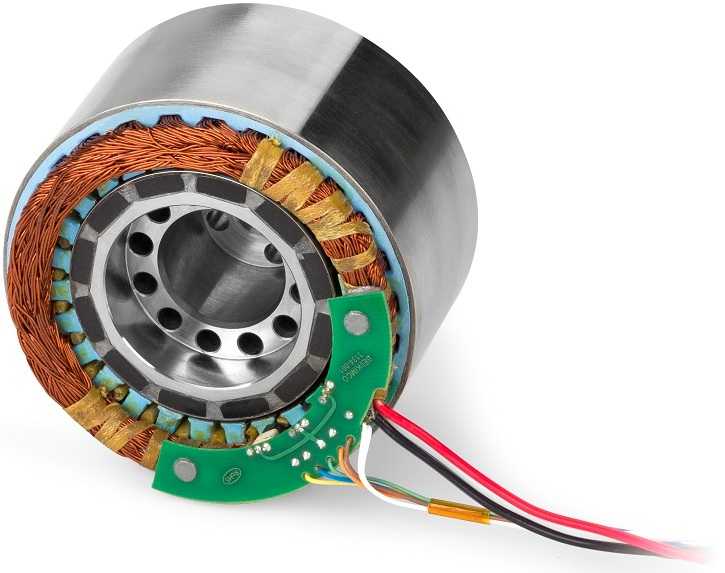
Как работает бесколлекторный двигатель постоянного тока
Принцип работы бесколлекторного двигателя постоянного тока тот же, что и у агрегатов других моделей. Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.
Вращение достигается благодаря смене направления магнитного поля в определенной последовательности. Взаимодействуя с магнитными полями ротора, постоянные магниты приводят статор в движение. От их мощности зависит момент силы.
Управление бесколлекторным двигателем постоянного тока
В двигателях подобного типа управление коммутацией осуществляется с помощью электроники. Регуляторы хода бывают двух видов:
- Без датчиков, используемые при отсутствии существенного изменения пускового момента или необходимости в управлении позиционированием (в вентиляторе). Широкое распространение этого вида регуляторов объясняется простотой их изготовления.
- С датчиками, устанавливаемые в агрегатах с существенным варьированием пускового момента (в низкооборотистых механизмах).
Положение ротора при подаче токовых сил на обмотки определяется электронной системой и датчиком положения. Наиболее распространены следующие типы датчиков:
- Датчик Холла. Этот узел изменяет свои выводы при переключении обмоток. Для измерения тока и частоты вращения применяется устройство с разомкнутым контуром. К датчику присоединяются три ввода. При изменении показаний запускается переработка прерывания. Если нужно обеспечить быстрое реагирование обработки прерывания, датчик следует подключить к младшим выводам порта.
- Датчик положения с микроконтроллером. Управление бесколлекторным двигателем постоянного тока осуществляется с помощью AVR ядра (чипа для выполнения тех или иных задач). Программа, вшитая в плату AVR, максимально быстро запускает двигатель при отсутствии дополнительных внешних приборов и управляет скоростью.
- Система arduino. Эта аппаратная вычислительная платформа представляет собой плату, состоящую из микроконтроллера Atmel AVR и элементарной обвязки программирования. Ее задача – конвертирование сигналов с одного уровня на другой. Нужную программу можно установить через USB.
Для устранения погрешностей в определении положении ротора, провода при подключении контроллера делают максимально короткими (12-16 см). Среди программных настроек контроллеров можно перечислить:
- смену направления;
- плавное выключение и торможение;
- ограничение тока;
- опережение КПД и мощности;
- жесткое/плавное выключение;
- быстрый/жесткий/мягкий старт;
- режим газа.
Некоторые модели контроллеров содержат драйвера двигателя, что дает возможность его запуска напрямую, без установки дополнительных драйверов.