

Введение
Почему болят глаза от экрана смартфона?
Некоторые владельцы телефонов задавались вопросом почему болит голова или появляется усталость глаз при долгом использовании устройства. Это связано с тем, что экран телефона постоянно мерцает.
Приведем пример дешевой лампы накаливания, создающей мерцание, заметное человеческим глазом. Постоянное угасание и вновь яркое свечение лампочки действительно сказывается на плохом самочувствии. Многие люди могли убедиться в этом самостоятельно.
Аналогичный процесс происходит с экраном смартфона. С тем лишь исключением, что частота мерцания у него гораздо выше, чем у обычной лампочки, и практически не замечается человеком. Мерцание экрана необходимо для управления интенсивностью свечения. Регулировка яркости на современных телефонах происходит двумя способами:
- Меняя уровень напряжения.
- Используя пульсацию света.
Первый способ при увеличении напряжения усиливает яркость, а при снижении, наоборот уменьшает. Для второго способа используется широтно-импульсная модуляция, о которой мы поговорим ниже.
Снизить нагрузку на глаза при долгом использовании смартфона, помогут следующие советы:
пользоваться компьютерными очками; делать перерывы через 20 минут; проводить гимнастику глаз и чаще моргать; пользоваться средствами для увлажнения (глазные капли/искусственная слеза); держать смартфон на расстоянии минимум 40 сантиметров; освещение в помещении должно быть хорошим; уделять внимание своей осанке
Что такое ШИМ и как работает
Задумываясь и о том, что такое ШИМ (или широтно-импульсная модуляция), сразу возникает ассоциация с шириной и импульсом. Она обеспечивает включение и выключение экрана на определенный промежуток времени.

Чем меньше яркость экрана — тем чаще будет происходить всплеск напряжения за ту же единицу времени (пример: 1 секунда).
Импульсом называется всплеск напряжения на заданном временном интервале. Он обладает определенной длинной, которую можно увеличить или уменьшить. Другими словами — контролировать его ширину. Импульсы могут посылаться через заданный временной интервал.
Например, светодиоды в дисплее телефона получают импульс с частотой 60 раз за 1 секунду. То есть каждый из них продолжается 0,017 секунды. Пока длиться импульс – светодиоды горят. Перестает – светодиоды гаснут.
Вернемся к такому понятию как яркость дисплея. Для ее изменения как раз и необходимо менять длительность импульса. Каждый новый импульс, из примера выше, появляется также с частотой 0,017 секунды. Но при этом светодиоды горят лишь половину из этого времени, то есть 0,008 секунды. Тем самым, сократив ширину в 2 раза, удастся снизить яркость на 50 %.
Воздействие на человека
Подсветка OLED-панелей не меняет своего уровня на протяжении всего периода использования. Но, яркость дисплеев регулируется ШИМом. Глаза человека устроены таким образом, что не замечают этого мерцания, так как частота широтно-импульсной модуляции у современных смартфонов высокая.
Современные смартфоны обладают частотой обновления экрана от 60 Герц. Для комфортного просмотра, зрительные рецепторы людей должны улавливать импульсы света с частотой до 300 раз в секунду. Поэтому, для некоторых людей низкая частота мерцания негативно сказывается на самочувствии. У них начинает болеть голова и появляется усталость глаз.
Интересно знать!Многие производители мобильных телефонов используют технологию ШИМ при достижении определенного уровня яркости. Так, устройства компании Apple, сперва снижают напряжение, которое делает дисплей менее ярким. Когда она станет равной 50 % — запускают ШИМ. После этого появляется мерцание и люди с повышенной чувствительностью глаз, замечают появление слабости, сухость глаз и другие недуги.
Почему один человек видит мерцание, а другой нет?
При включении светодиодов с большим временным интервалом, человеческий глаз естественно замечает, что какое-то время они не горят. Но если светодиод будет гореть и затухать 60 раз в секунду, то люди престают это замечать. Этот эффект называется порогом слияния мерцания.
Для большинства людей он равен 60, но встречаются и исключения. Так, например, пилоты и киберспортсмены, проводящие много времени за компьютерными играми, более восприимчивы к частоте мерцания света. Стоит отметить, что у собак порог слияния мерцания находится в диапазоне 70 – 80 раз в секунду. А у некоторых насекомых, это значение достигает 250.
Также, стоит отметить, что все люди видят мерцание по-разному. Но большинство не замечает ее при высокой яркости. Яркий экран избавлен от мерцания, но это сказывается на автономности устройства, так как тратиться больше электроэнергии.
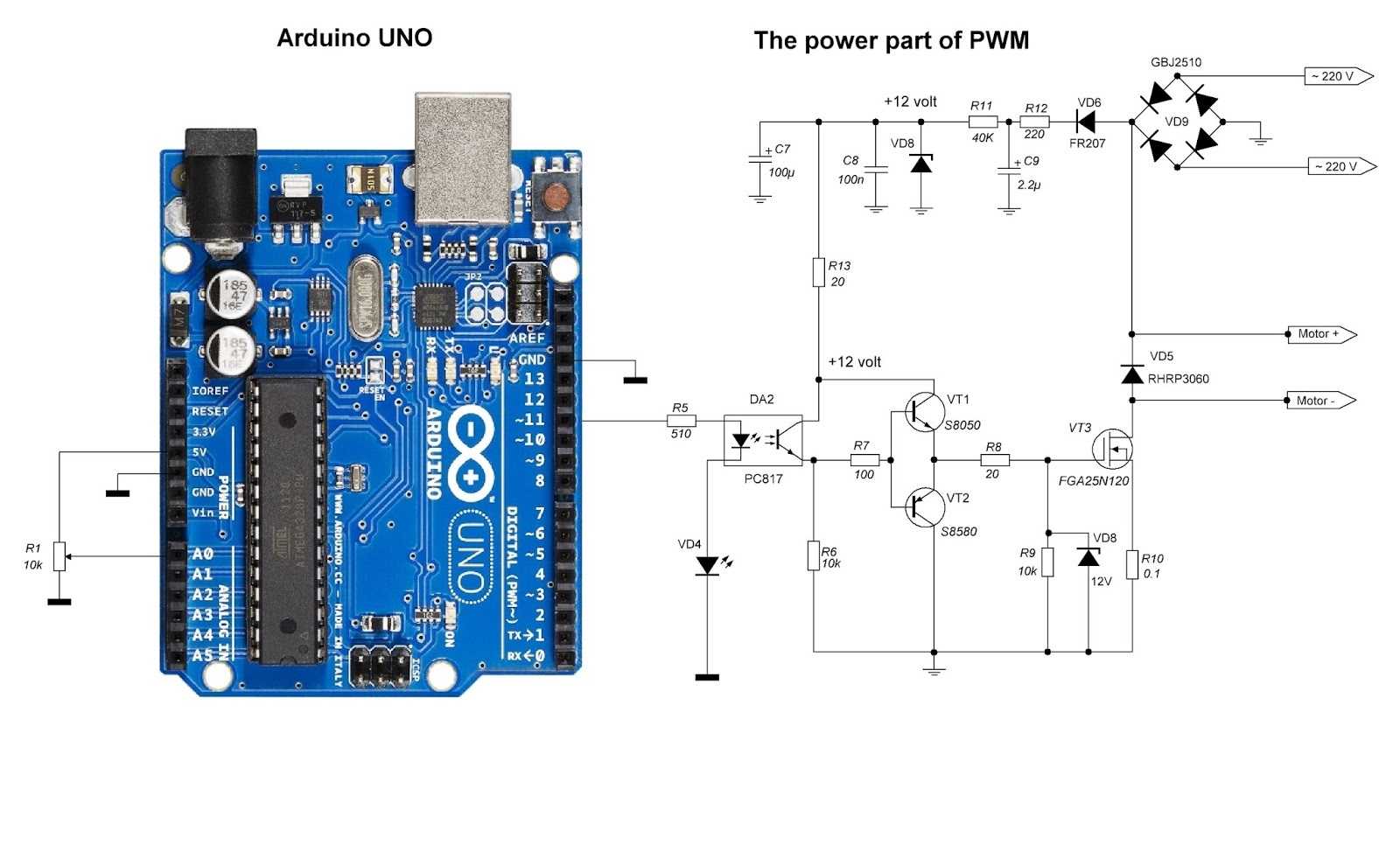
Практические советы
Транзистор VT1 должен подбираться в зависимости от мощности нагрузки. Например, для изменения яркости одноваттного светодиода достаточно будет биполярного транзистора с максимально допустимым током коллектора 500 мА.
Управление яркостью светодиодной ленты должно осуществляться от источника напряжения +12 В и совпадать с её напряжением питания. В идеале регулятор должен питаться от стабилизированного блока питания, специально предназначенного для ленты.
Нагрузка в виде отдельных мощных светодиодов запитывается иначе. В этом случае источником питания диммера служит стабилизатор тока (его еще называют драйвер для светодиода). Его номинальный выходной ток должен соответствовать току последовательно включенных светодиодов.
Помогла ли вам статья?
Да7Не особо2
Широтно-импульсная модуляция — ШИМ
Почему применяется ШИМ
Основными причинами применения ШИМ являются лёгкость её реализации, для которой от подсветки нужна лишь способность часто включаться и выключаться, а также обеспечиваемый с её помощью широкий диапазон возможных значений яркости.
Снизить яркость CCFL-подсветки можно путём снижения тока, протекающего через лампу, но лишь примерно вдвое ввиду их строгих требований к току и напряжению. Это делает ШИМ единственным простым способом достижения широкого диапазона регулирования яркости. CCFL-лампа обычно управляется инвертором, включающимся и выключающимся с частотой в десятки килогерц, что находится за пределами мерцания, заметного для человека. Однако ШИМ обычно работает на гораздо более низкой частоте, около 175 Гц, что может приводить к заметным дефектам изображения.
Яркость светодиодной подсветки можно регулировать в широких пределах путём изменения проходящего через них тока, правда в результате несколько изменяется цветовая температура. Этот аналоговый подход к изменению яркости светодиодов также нежелателен ввиду того, что вспомогательные цепи обязаны учитывать тепло, выделяемое светодиодами. Светодиоды во включённом состоянии нагреваются, что уменьшает их сопротивление и дополнительно увеличивает протекающий через них ток. Это может привести к быстрому росту тока в сверхъярких светодиодах и послужить причиной их выхода из строя. При использовании ШИМ ток можно принудительно удерживать на постоянном уровне в течение рабочего цикла, в результате чего цветовая температура всегда одинакова и перегрузок по току не возникает.
История
Некоторым машинам (например, двигателю швейной машины ) требуется частичная или регулируемая мощность. В прошлом управление (например, в ножной педали швейной машины) реализовывалось с помощью реостата, подключенного последовательно с двигателем, чтобы регулировать количество тока, протекающего через двигатель. Это была неэффективная схема, так как это также тратило впустую мощность в виде тепла в резистивном элементе реостата, но терпимо, потому что общая мощность была низкой. Хотя реостат был одним из нескольких методов управления мощностью (см. Автотрансформаторы и Variac для получения дополнительной информации), дешевый и эффективный метод переключения / регулировки мощности еще не был найден. Этот механизм также должен был иметь возможность приводить в действие двигатели для вентиляторов, насосов и роботизированных сервоприводов и должен быть достаточно компактным, чтобы взаимодействовать с регуляторами яркости ламп. ШИМ возник как решение этой сложной проблемы.
Одно из первых применений ШИМ было в Sinclair X10, аудиоусилителе мощностью 10 Вт, доступном в виде комплекта в 1960-х годах. Примерно в то же время ШИМ начал использоваться в управлении двигателями переменного тока.





Следует отметить, что в течение примерно столетия некоторые электродвигатели с регулируемой скоростью имели приличный КПД, но они были несколько более сложными, чем электродвигатели с постоянной скоростью, и иногда требовали громоздких внешних электрических устройств, таких как группа резисторов с регулируемой мощностью или вращающиеся преобразователи. например, диск Уорда Леонарда .
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Принцип шим-регулятора
Работа ШИМ регулятора сложностью не отличается. ШИМ-регулятор — устройство, выполняющее такую же функцию, что и традиционный линейный регулятор мощности (то есть, меняет напряжение или ток за счёт силового транзистора, рассеивающего значительную мощность на себе). Но ШИМ-регулятор отличается намного большим КПД. Достигается это благодаря тому, что управляющий силовой транзистор функционирует в ключевом режиме (либо включен, тогда пропускает большой ток, но мало падение напряжения, либо выключен — ток не проходит). В результате на таких силовых транзисторах мощность практически не рассеивается и энергия впустую не тратится.
После силового транзистора напряжение выходит как прямоугольные импульсы с изменяющейся скважностью в зависимости от необходимой мощности. Но сигнал нужно демодулировать (то есть, выделить среднее напряжение)
Этот процесс происходит или в самой нагрузке (когда она индуктивного характера) или если между нагрузкой и силовым каскадом располагают фильтр нижних частот.
Пример использования шим регулятора
Самый простой пример использования регулятора напряжения ШИМ — ШИМ микросхема NE555, с которой знаком каждый радио-любитель. Благодаря ее универсальности можно конструировать самые разнообразные детали: от простейшего одновибратора импульсов с 2 в обвязке до модулятора, состоящего из большого числа компонентов. ШИМ регулятор напряжения имеет широкую область применения — это схемы регулировки яркости светодиодов и лент, а также регулировка скорости вращения движков.
Управление электродвигателями
ШИМ применяется для управления двигателями в импульсном режиме. По характеристикам двигателя необходимо подобрать значение частоты ШИМ, чтобы обеспечить оптимальные характеристики электропривода. При выборе задающей частоты важным критерием являются акустические шумы, создаваемые двигателем при работе. Коллекторные двигатели могут создавать звуковой шум на частотах от 20 Гц до 4 кГц. Для исключения этого нежелательного эффекта нужно выбирать частоту выше 4 кГц. На таких частотах акустического шума уже не будет, так как механические части имеют более низкие резонансные частоты.
Средние цены
Для того, чтобы понять в каком ценовом диапазоне находятся МРРТ контроллеры различных производителей, можно рассмотреть стоимость моделей, приведенных выше, это:
- КЭС 100/20 MPPT – от 10000,00 рублей;
- КЭС DOMINATOR MPPT 250/60 – от 40000,00 рублей;
- Epsolar MPPT TRACER-2215BN 20А 12/24В – от 9000,00 рублей;
- IT6415ND 60A 12V/24V/36 В – от 30000,00 рублей.
- Victron BlueSolar 100/15 12/24В 15А – от 11000,00 рублей;
- Victron BlueSolar 150/70 12/24/48В 70А – от 55000,00 рублей.
Как видно из приведенных цифр, наиболее дешевые, это модели китайского производства, а наиболее дорогие – европейских производителей.
Продукция отечественных предприятий несколько дороже устройств, произведенных в Китае, но дешевле изготовленных в Европе.
H-мосты
ШИМ часто используется в сочетании с H-мостом. Эта схема названа так, потому что она напоминает букву H и позволяет удвоить эффективное напряжение на нагрузке, поскольку источник питания можно переключать в обе стороны от нагрузки. В случае индуктивных нагрузок, таких как двигатели, для подавления индуктивных пиков, способных повредить транзисторы, используются диоды. Индуктивность в двигателе также имеет тенденцию устранять высокочастотную составляющую сигнала. Данная схема также может использоваться с динамиками для аудиоусилителей класса D.
Несмотря на простоту, схема H-моста имеет один серьезный недостаток, при переходе между полевыми транзисторами возможен одновременный запуск обоих транзисторов сверху и снизу моста, что позволит полностью нагрузить блок питания. Это условие называется прострел (shoot through) и может возникнуть с любым типом транзисторов, используемых в H-мосте. Если источник питания достаточно мощный, транзисторы выйдут из строя. Поэтому перед транзисторами используются драйверы, которые запирают один транзистор перед тем, как открыть другой.
 Рисунок 4 – Упрощенный H-мост
Рисунок 4 – Упрощенный H-мост
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.






Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Принципы работы широтно-импульсной модуляции (ШИМ)
Если шим — контролёр выходит из строя
Временами шим — контролёры их схемы и источник питания (в том числе и встроенные в ноутбук) могут ломаться и выходить из строя. В таких случаях понадобится выявить неисправности (в одних случаях проверять необходимо источник питания, в других проверять стоит саму схему). Для этой цели были разработаны мультиметры. Мультиметры тщательно исследуют работоспособность шим — контролёров и при необходимости помогают устранить неисправности. Самыми распространёнными причинами, почему следует проверять эти устройства, считают нестабильную работу платы и изменения показателей напряжения. Если их устранить, техника будет работать.
Зачем нужен был конденсатор?
Измерение мощности и спектра импульсов с помощью анализатора спектра или сигналов
Главное преимущество анализаторов спектра и сигналов заключается в их способности измерять частотный состав и мощность сигнала. Спектральная информация может выявлять проблемы, вызывающие неоптимальную работу РЛС, например, потерю мощности и излучение нежелательных сигналов
На рис. 3 видно, что спектр может дать информацию о длительности, периоде и скважности импульсов

Рис. 3. Частотный спектр показывает полезную информацию об импульсом сигнале во временной области
Современные анализаторы спектра, такие как анализатор сигналов Keysight серии UXA (рис. 4) используют цифровое свипирование, что дает выигрыш по скорости, точности и фазовому шуму по сравнению с аналоговыми решениями. Анализаторы сигналов используют для расчета спектра аналого-цифровые преобразователи (АЦП), цифровые сигнальные процессоры (ЦСП) и быстрое преобразование Фурье (БПФ). Основным преимуществом анализаторов сигналов на основе БПФ является скорость вычисления, особенно для внутриканальных измерений.

Рис. 4. Анализатор сигналов Keysight серии UXA
Благодаря улучшенным высокоскоростным АЦП и таким методам обработки, как подавление собственных шумов, динамический диапазон современных анализаторов сигналов приближается к динамическому диапазону панорамных анализаторов. Поскольку анализаторы сигналов рассчитывают фазовую информацию, они могут выполнять векторный анализ сигналов и демодуляцию сложных сигналов. Добавление измерительного ПО для анализа импульсов дополнительно упрощает и расширяет измерения сигналов РЛС.
Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
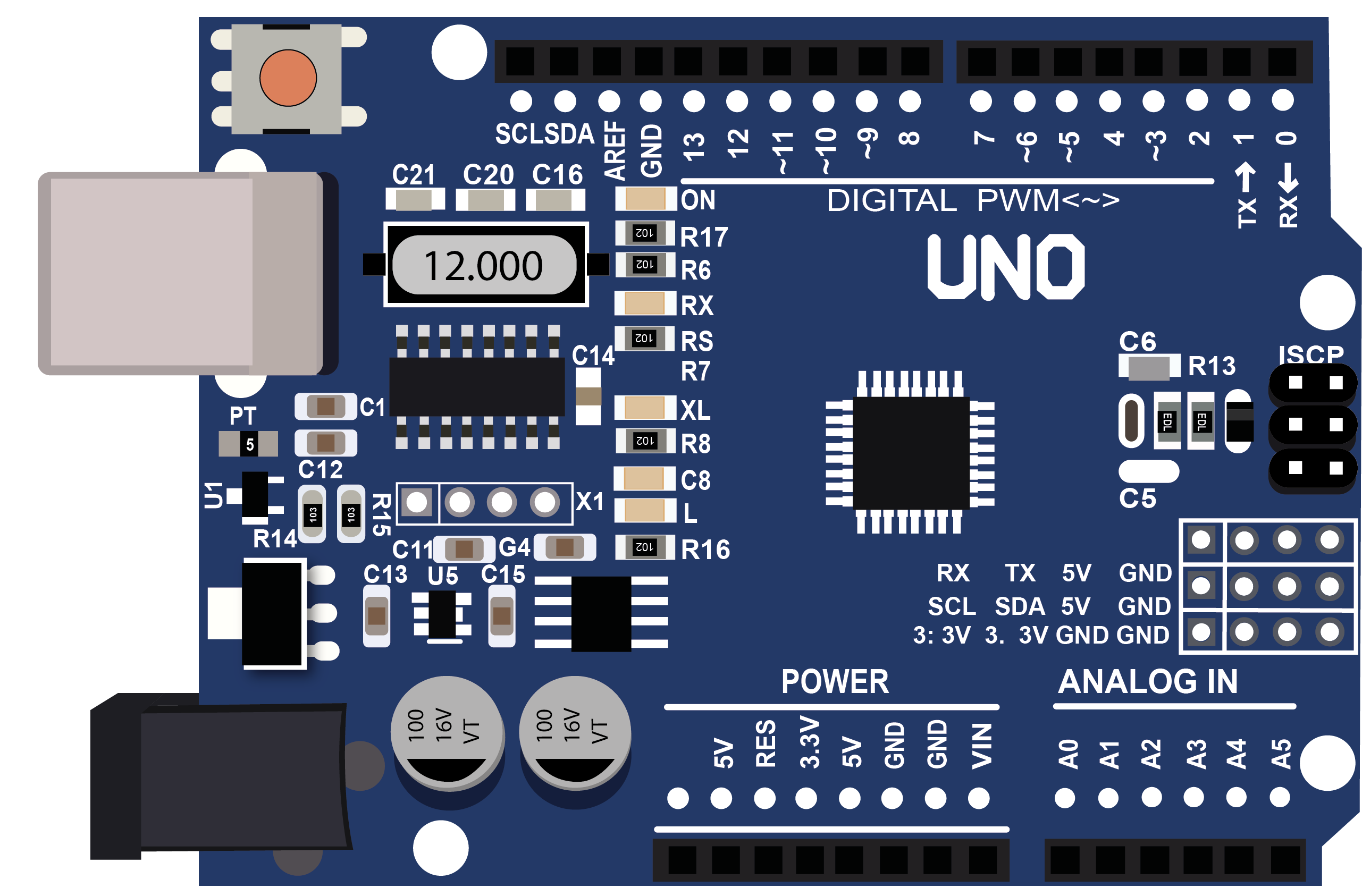
Контакты ШИМ в микроконтроллере AVR ATmega16
Микроконтроллер Atmega16 имеет 4 контакта для использования ШИМ модуляции — PB3(OC0), PD4(OC1B), PD5(OC1A), PD7(OC2). Более наглядно они представлены на следующем рисунке.
Также ATmega16 имеет два 8-битных (Timer0 и Timer2) и один 16-битный таймер (Timer1). Для понимания принципов формирования ШИМ мы должны понимать основы работы с этими таймерами. Как известно, частота представляет собой количество циклов в секунду поэтому она однозначно связано зависимостью с временем. То есть чем более высокая частота нам нужна, тем более быстрый таймер мы должны использовать. Чем выше частота ШИМ, тем более точно мы можем управлять ее параметрами.
В данной статье для управления ШИМ в микроконтроллере ATmega16 мы будем использовать его Timer2. С его помощью можно выбрать коэффициент заполнения (duty cycle) ШИМ в широких пределах. Кратко рассмотрим основы этого процесса.
Как проверить ШИМ-контроллер
Есть несколько способов как сделать проверку ШИМ-контроллера. Можно, конечно это сделать без мультиметра, но зачем так мучаться, если можно воспользоваться нормальным прибором.
Прежде, чем проверять работу ШИМ-контроллера, необходимо выполнить базовую диагностику самого блока питания. Она выполняется так:
Шаг 1. Внимательно осмотреть в выключенном состоянии сам источник питания, в котором установлен PWM. В частности надо тщательно осмотреть электролитические конденсаторы на предмет вздутости.
Шаг 2. Провести проверку предохранителя и элементов входного фильтра блока питания на исправность.
Шаг 3. Провести проверку на короткое замыкание или обрыв диодов выпрямительного моста. Прозвонить их можно не выпаивая из платы. При этом надо быть уверенным, что проверяемая цепь не шунтируется обмотками трансформатора или резистором. Если есть на это подозрение, то всё таки придётся выпаивать элементы и проверять уже по отдельности.
Шаг 4. Провести проверку исправностм выходных цепей, а именно электролитических конденсаторов низкочастотных фильтров, выпрямительных диодов, диодных сборок и т.п.






Шаг 5. Провести проверку силовых транзисторов высокочастотного преобразователя и транзисторов каскада управления. При этом в обязательном порядке проверьте возвратные диоды, которые включенны параллельно электродам коллектор-эмиттер силовых транзисторов.
Проверка ШИМ-контроллера — видео инструкции:
Принцип работы ШИМ
В отличии от линейных систем, где мощность регулируется путём снижения электрических параметров (тока или напряжения), при использовании ШИМ мощность, передаваемая потребителю, регулируется временем импульсов, что существенно повышает эффективность работы контроллера. В аналоговых системах остаточная мощность рассеивалась в виде тепла, здесь же при снижении потребления остаточная мощность просто не используется.
Основная характеристика ШИМ – СКВАЖНОСТЬ (процент заполнения) – процентное соотношение длительности импульсов к периоду. На рисунке ниже изображено 5 степеней скважности прямоугольного ШИМ сигнала:. Скважность ШИМ
Скважность ШИМ
ПЕРИОД — это время за которое происходит полный цикл колебания сигнала. Измеряется в секундах. Он линейно зависит от частоты сигнала и рассчитывается по формуле:
T(перод) = 1/f(частота)
f(частота) = 1/ T(перод)
Частота ШИМ – это количество периодов (или если хотите, циклов колебаний) в единицу времени. Частота измеряется в Герцах (Гц), 1 Гц это одно колебание в 1 секунду.
Если сигнал делает 100 колебаний в секунду, значит частота равняется 100 Гц. Чем выше частота тем меньше период.
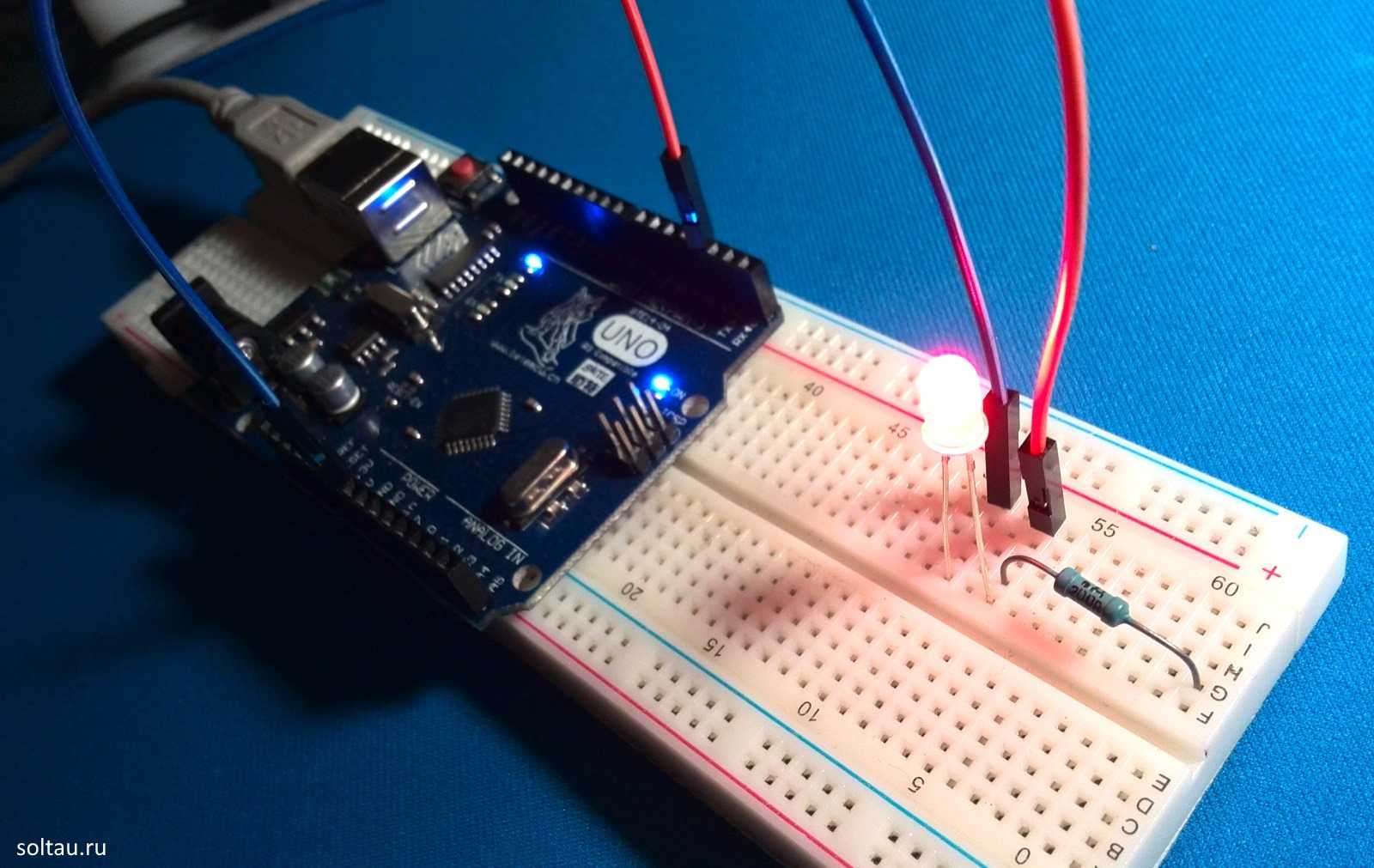
Индивидуальные задания
- Измените третий пример так, чтобы после плавного увеличения яркости, светодиоды гасли плавно.
- Подберите соотношение яркости светодиодов так, чтобы добиться белого свечения светодиода.
- Сделайте из шилда лампу настроения. Цвета должны случайным образом переливаться. Организуйте основной цикл так, чтобы сначала случайным образом выбирался номер вывода, а потом он плавно зажигался и гас. Для этого можно использовать функцию random(min,max). Для работы с ней объявите переменную int pin=0; и в цикле void loop() вызовите эту функцию pin=random(9,12);. Она запишет в переменную pin значение от 9 до 11.
Остальные статьи цикла можно найти здесь.
Мы будем очень рады, если вы поддержите наш ресурс и посетите магазин наших товаров shop.customelectronics.ru.