

Связанные материалы
Микроконтроллеры AVR в радиолюбительской практике. А. В. Белов… А. В. Белов Микроконтроллеры AVR в радиолюбительской практике Данная книга представляет собой…

Вторая жизнь лампового радиоприемника Philips 592LN (Голландия, 1947). Часть 3… В этой части разберемся с инсталляцией китайского ФМ-радиомодуля в древний Philips 592LN , с… Elect_60: программа микроконтроллерного управления внешними устройствами от ПК… Многие наши коллеги желающие создать микроконтроллерное устройство, управляемое от ПК сталкиваются…
Программирование точных часов с применением алгоритма Брезенхама (Bresenham’s Algorithm)… В свое время меня заинтересовала возможность реализации точного хода часов программно. Алгори class=»aligncenter» width=»350″ height=»350″ Трансивер 2,4 ГГц Nordic Semiconductor nRF24L01. Перевод таблиц даташита, пояснения и коды для организации сети… Wireless Transceiver Module NRF24L01+ 2.4GHz, 4 шт. на Али Привет, датагорцы! Выкладываю перевод…
Работа с датчиком DHT11. Строим термометр-гигрометр на ATMEGA8… Привет любителям электроники! Сегодня я решил познакомиться с датчиком влажности DHT11, который…
Программа ForMC в помощь программисту микроконтроллеров… Программа называется ForMC, изначально предназначалась для МК AVR. В ней объединены несколько…
Универсальный контроллер управления 7-сегментными LED индикаторами по двум проводам (Atmega16)… Занялся я конструированием нового устройства и встал вопрос — на чем отображать данные….
Термометр + термостат на микроконтроллере PIC16F876 и датчиках DS18B20… История этого термометра началась в далёком 2011 году. Мне понадобилось в подвале частного дома, в…
Простой модульный вольтметр переменного напряжения на PIC16F676… Простой вольтметр переменного напряжения с частотой 50 Гц, выполнен в виде встраиваемого модуля,…
Характеристика резистора для пассивного регулятора громкости… Давайте по простому разберемся, какая кривая зависимости сопротивления от угла поворота должна быть…
Цифровое телевидение, ч.1… Говорят про это много, но техническую сторону вопроса освещают нечасто. Поскольку работа моя…
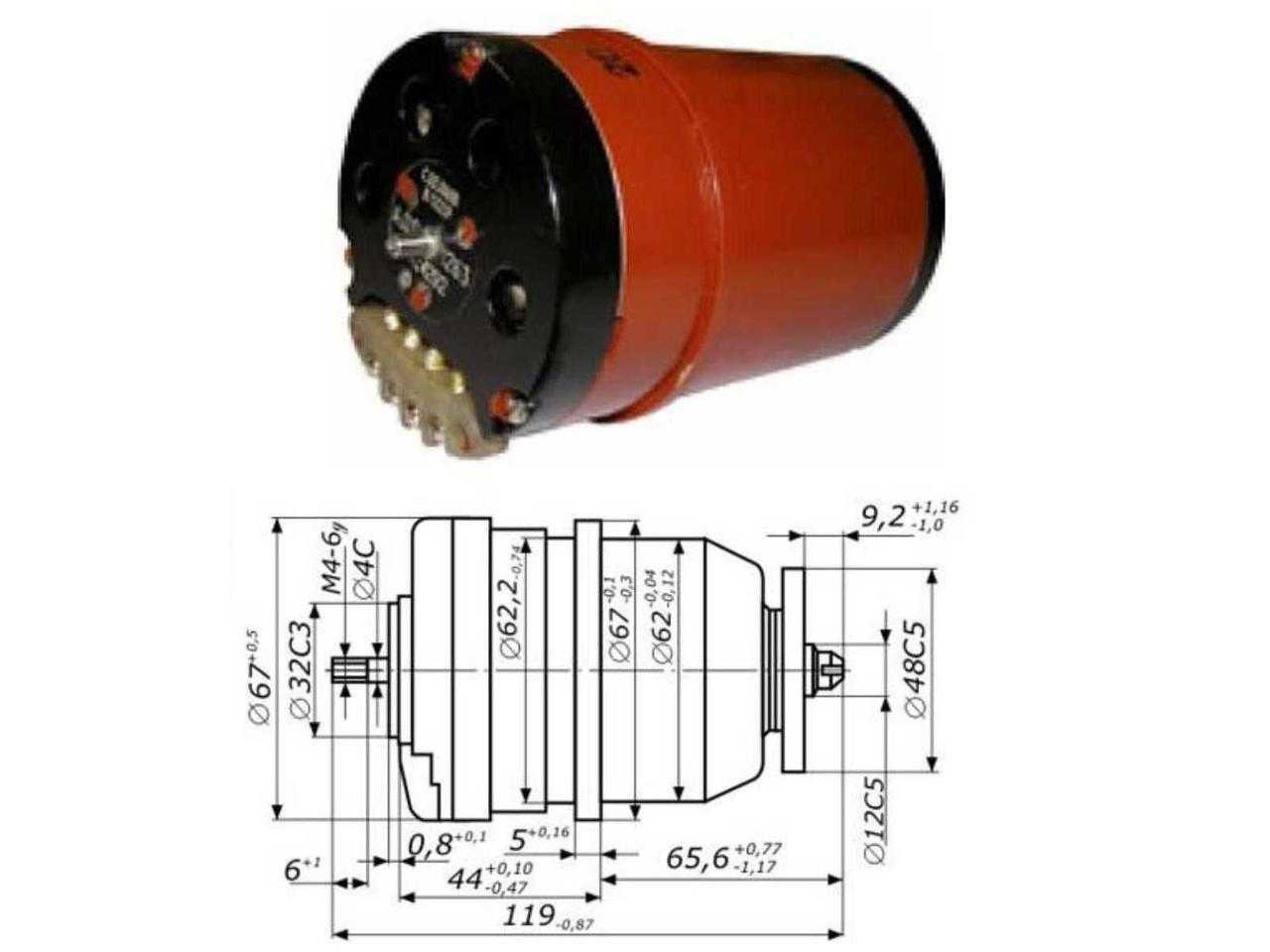
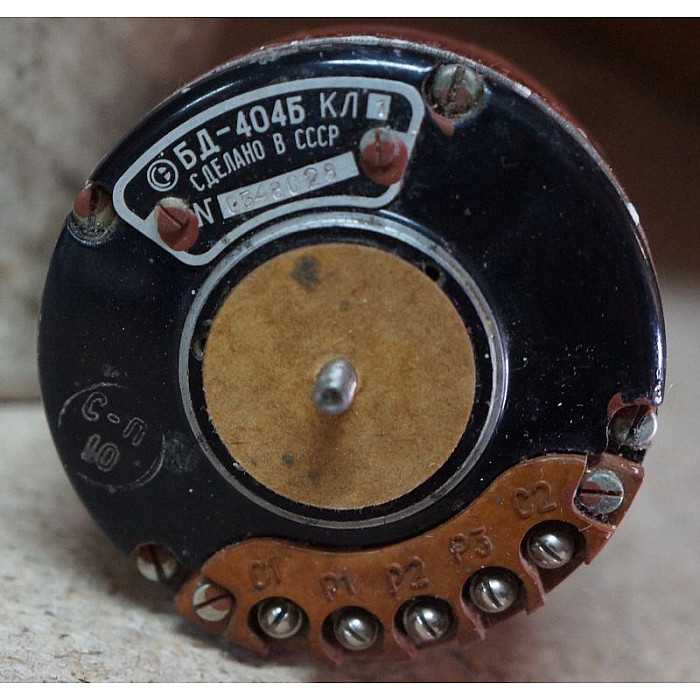
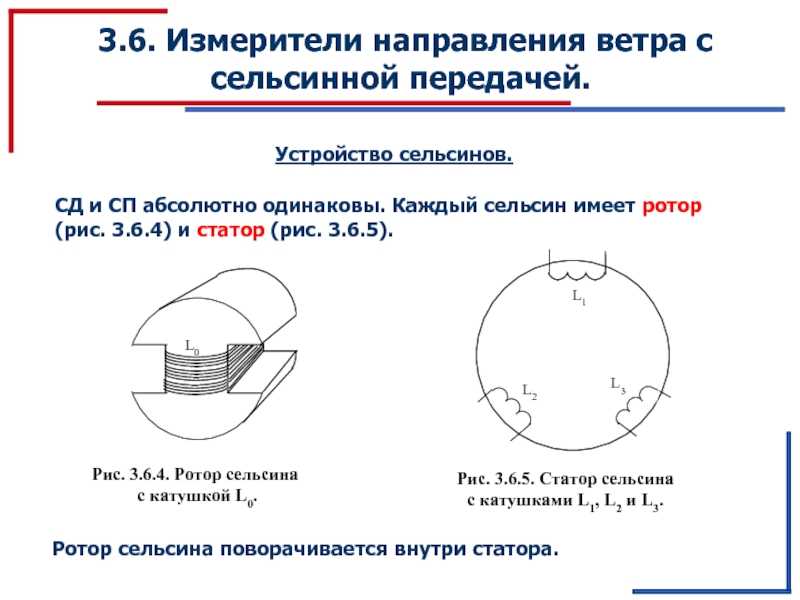
Типы сельсиновых датчиков
Любой действующий сельсин включает в свой состав такие обязательные элементы, как статор и ротор, выполненные в виде обмоток с электромагнитной связью. Известны следующие разновидности электротехнических устройств, отличающиеся количеством катушек, расположенных в статоре и роторе. Они могут быть представлены следующими сочетаниями:
- Одна и три.
- Три и одна.
- Три и три.
По своему практическому применению (использованию в электронных схемах авторегулировки) эти приборы делятся на следующие виды:
- устройства-датчики;
- сельсины-приемники;
- приборы дифференциального типа.

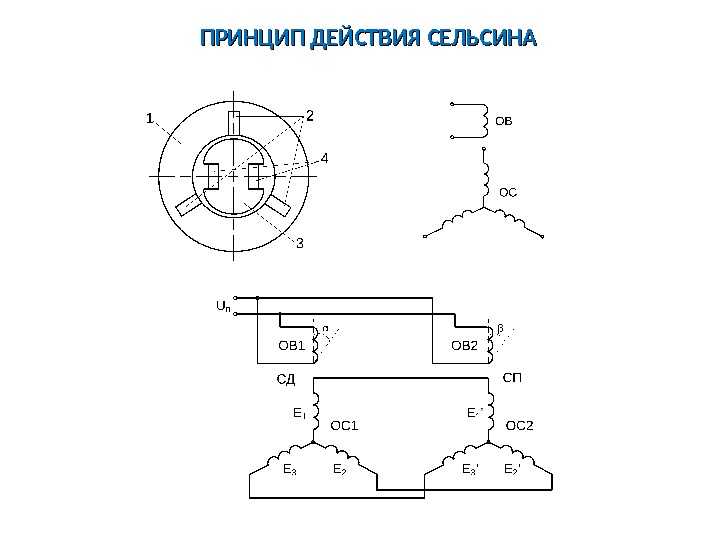
Для понимания работы классического сельсинового прибора потребуется рассмотреть его схематическое представление (фото справа).
§ 5.16. ТРЕХФАЗНЫЕ СЕЛЬСИНЫ
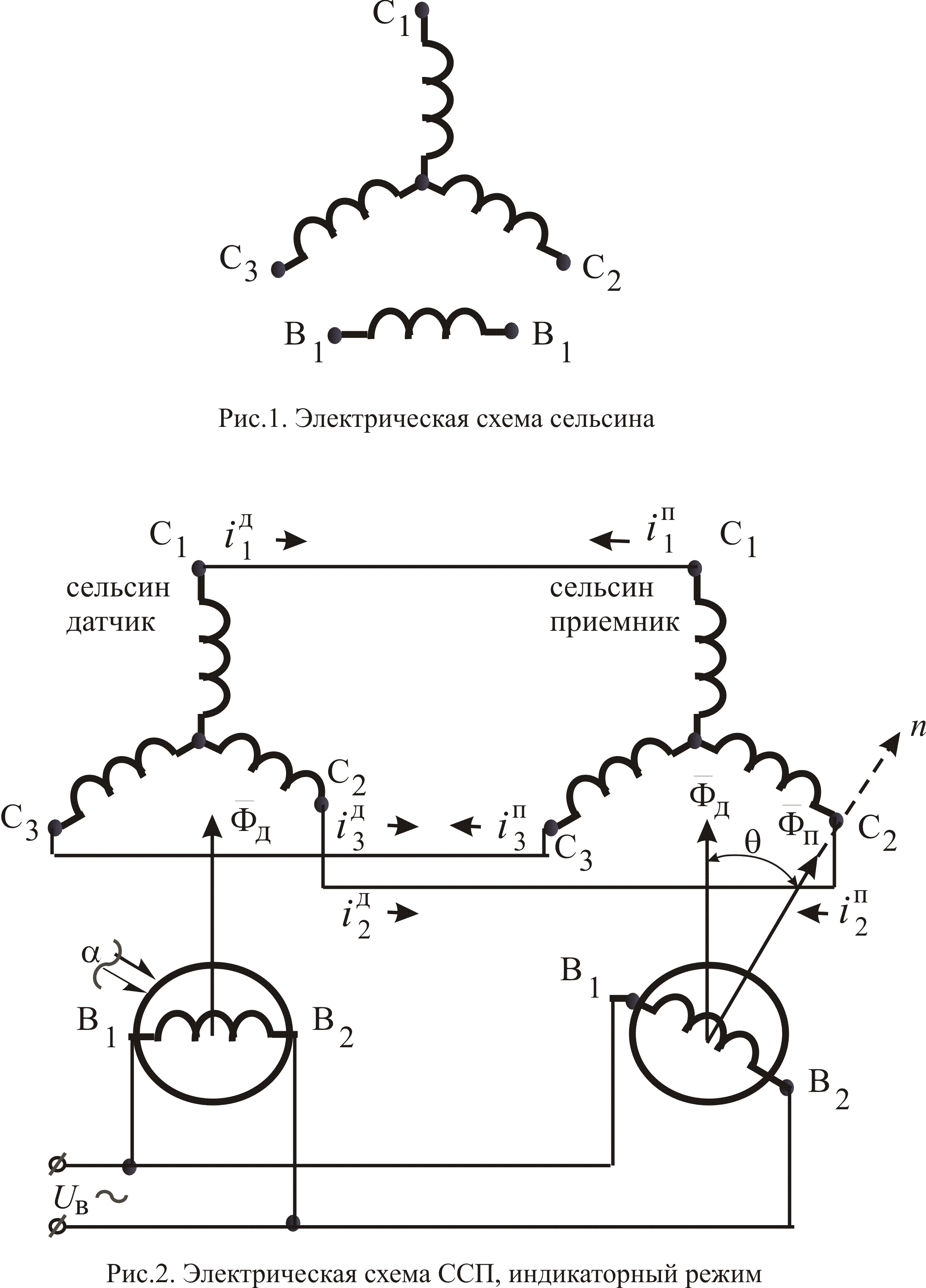
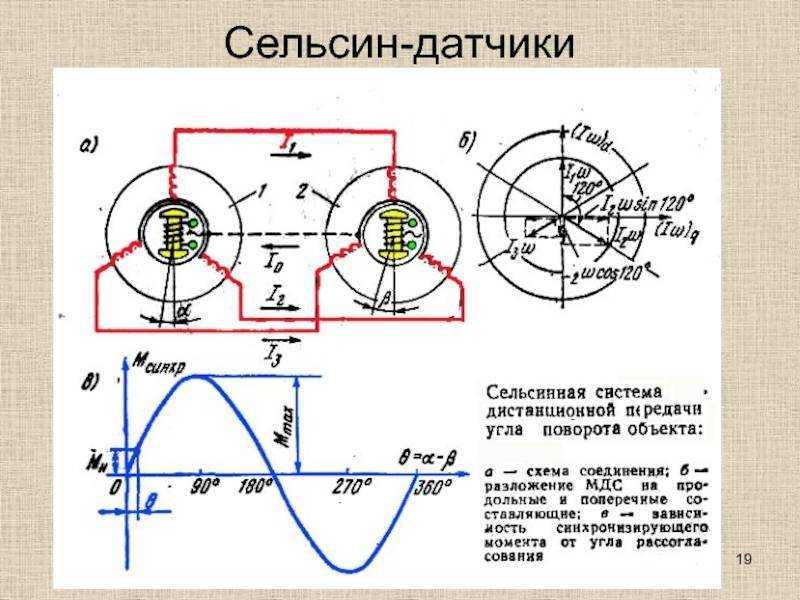
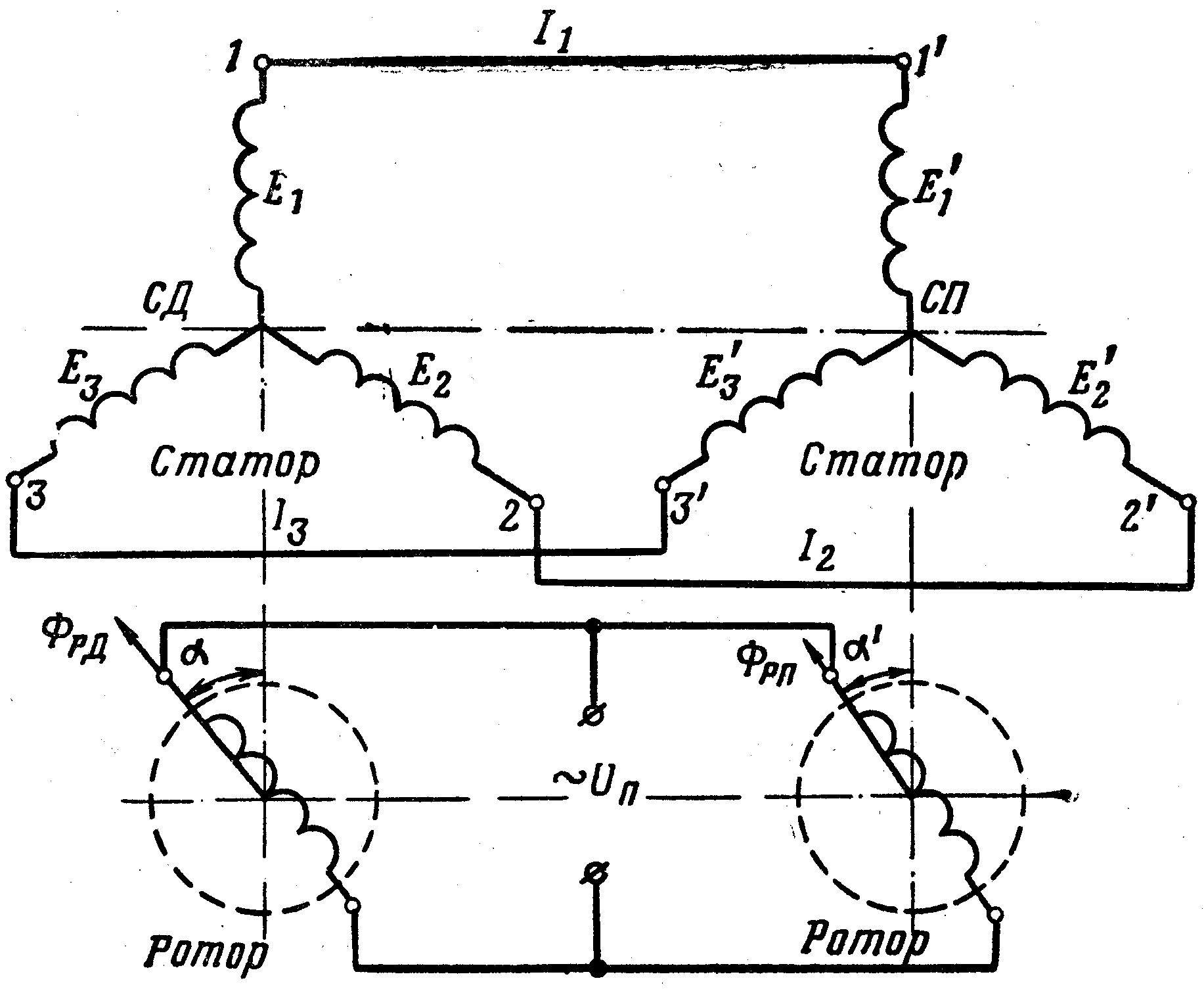
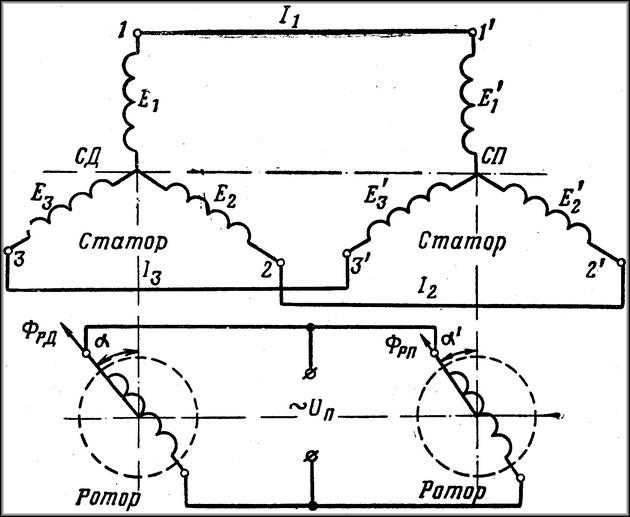
В схеме синхронной связи, выполненной на трехфазных сельсинах (рис. 5.47), в качестве датчика Д и приемника П используются два обычных асинхронных двигателя с фазными роторами. Обмотки статора подключают к общей трехфазной сети переменного тока, а обмотки ротора соединяют друг с другом через контактные кольца. При подключении обмоток статора датчика и приемника к сети в сельсинах возникает круговое вращающееся поле, которое индуцирует в одной из фаз ротора датчика ЭДС ед = Еm sin(ωt ± θд ), а в одноименной фазе ротора приемника ЭДС еп = Ет sin (ωt ± θп ), где θд и θп — углы, образуемые осями одноименных фаз ротора и статора для датчика и приемника.
|
Рис. 5.47. Схема включения трехфазных сельсинов |
Знак « + » ставится, если ротор датчика или приемника повернут навстречу вращающемуся полю, а «-» — если ротор датчика или приемника повернут в направлении поля.
При согласованном положении ведущей O1 и ведомой О2 осей, когда углы поворота роторов датчика и приемника равны, ЭДС Ед и Еп , индуцированные в одноименных фазах роторов, равны и направлены встречно (рис. 5.48, а),вследствие чего по обмоткам роторов ток не проходит. При этом синхронизирующий момент Мсн = 0.
При появлении угла рассогласования θ = θд — θп в контуре одноименных фаз обмотки ротора возникает сумма ЭДС ΔÉ2 = Éд + Éп (рис. 5.48, б), которая создает уравнительный ток
Í2 = ΔÉ2 /(Z2д + Z2п ) = ΔÉ2 /Z2
|
Рис. 5.48. Векторная диаграмма |
Этот ток отстает от вектора ΔÉ2 на угол φ, тангенс которого tg φ = Х2 /R2 . При взаимодействии уравнительного тока I2 с магнитным потоком Ф в датчике и приемнике возникают синхронизирующие моменты Мсн д = сФm I2 cos ψд ; Мсн.п = сФт I2 cos ψп , где ψд и ψп — углы сдвига фаз между током ротора и ЭДС датчика и приемника.
Если ротор датчика повернут относительно ротора приемника на положительный угол θ, то в датчике активная составляющая тока I2 совпадает с ЭДС Ед (рис. 5.48, б). При этом синхронизирующий момент действует на ротор датчика в направлении вращения магнитного поля и стремится повернуть его в исходное положение. В роторе приемника активная составляющая тока I2 противоположна по фазе ЭДС Еп , поэтому синхронизирующий момент стремится повернуть ротор приемника против направления вращения поля так, чтобы он занял согласованное с ротором датчика положение.
Одним из существенных недостатков трехфазных сельсинов является то, что синхронизирующие моменты в датчике и приемнике различны, так как различны углы ψд и ψп , а следовательно, и активные составляющие тока I2 . При этом кривая Мсн = f(θ) имеет несимметричный характер, зависящий от направления вращения ротора. В результате точность передачи. угла в схемах, выполненных на трехфазных сельсинах, также зависит от направления вращения ротора датчика.
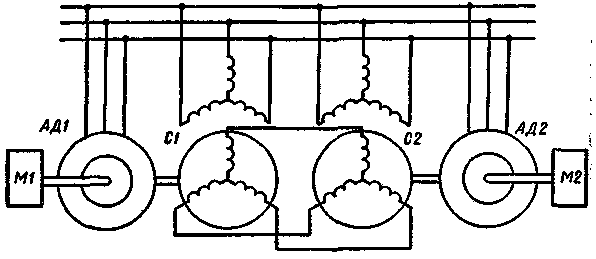 |
| Рис. 5.49. Схема электрического вала |
Другим существенным недостатком трехфазных сельсинов является необходимость иметь трехфазный источник питания, поэтому трехфазные сельсины применяют обычно только для синхронного вращения машин большой мощности.
На рис. 5.49 показана схема включения трехфазных сельсинов, называемая электрическим валом. В этой схеме рабочие механизмы M1 и М2 приводятся во вращение мощными асинхронными двигателями АД1 и АД2. С ними спарены вспомогательные двигатели С1 и С2 (сельсины), соединенные между собой линией связи. При синхронном вращении валов ток в роторах сельсинов отсутствует. При наличии рассогласования в сельсинах возникают синхронизирующие моменты, один из которых увеличивает момент на валу отставшего механизма, а второй тормозит вал механизма, работающего с опережением. Вследствие этого система снова приходит в согласованное положение. Мощность вспомогательных асинхронных двигателей (сельсинов) обычно составляет 10—15% от мощности основных двигателей.
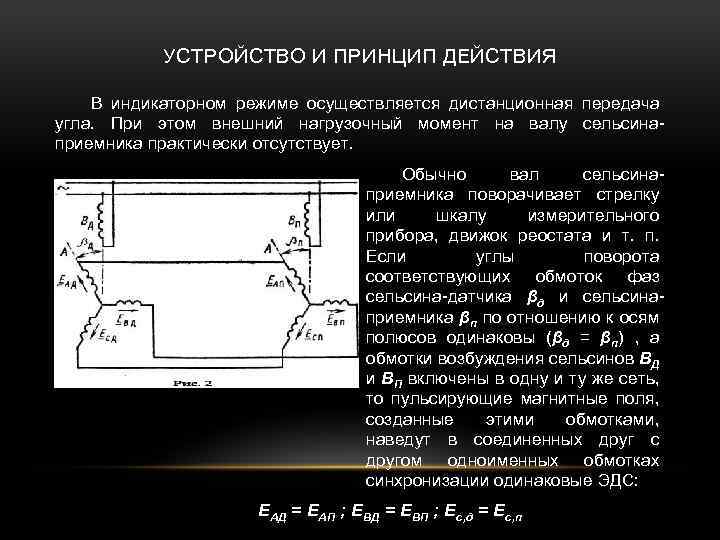
Схема и принцип действия
На предложенных схемах изображены различные варианты включения (как датчика, как приемника и в качестве дифференциального устройства).
После их анализа можно сделать следующие выводы:
- Как датчики, так и приемники своими статорными обмотками напрямую подсоединяются к питающей сети.
- Их 3-х катушечные роторные обмотки объединены линейными электрическими связями.
- За счет такого включения при повороте первичного ротора на заданный угол аналогичный узел приемника повернется на тот же градус.
- Если вращать подвижную часть датчика с фиксированной скоростью – с той же частотой будет крутиться соответствующий узел приемника.

В основу данного эффекта заложен принцип э/м индукции, суть которого состоит в способности обмотки с переменным током наводить поле в близко расположенной катушке (на схеме – вариант «а»).
Важно! Индуцировать стороннее поле способен только меняющийся по величине или фазе (то есть переменный) ток. Величина наводимого в катушке статора ЭДС зависят от ее удаления от роторных обмоток. В случае, когда вращающиеся части двух приборов (приемного и передающего) разнесены от своих статоров на равное расстояние – наблюдается интересный эффект
Он состоит в том, что в этой ситуации токи в роторных контурах равны и противоположны по направлению, что приводит к обнулению их результирующей. Следствием этого является пропадание вращающего момента на валах обоих сельсинов (они неподвижны)!
В случае, когда вращающиеся части двух приборов (приемного и передающего) разнесены от своих статоров на равное расстояние – наблюдается интересный эффект. Он состоит в том, что в этой ситуации токи в роторных контурах равны и противоположны по направлению, что приводит к обнулению их результирующей. Следствием этого является пропадание вращающего момента на валах обоих сельсинов (они неподвижны)!





Величина наводимого в катушке статора ЭДС зависят от ее удаления от роторных обмоток. В случае, когда вращающиеся части двух приборов (приемного и передающего) разнесены от своих статоров на равное расстояние – наблюдается интересный эффект. Он состоит в том, что в этой ситуации токи в роторных контурах равны и противоположны по направлению, что приводит к обнулению их результирующей. Следствием этого является пропадание вращающего момента на валах обоих сельсинов (они неподвижны)!

§4.1. Сельсины
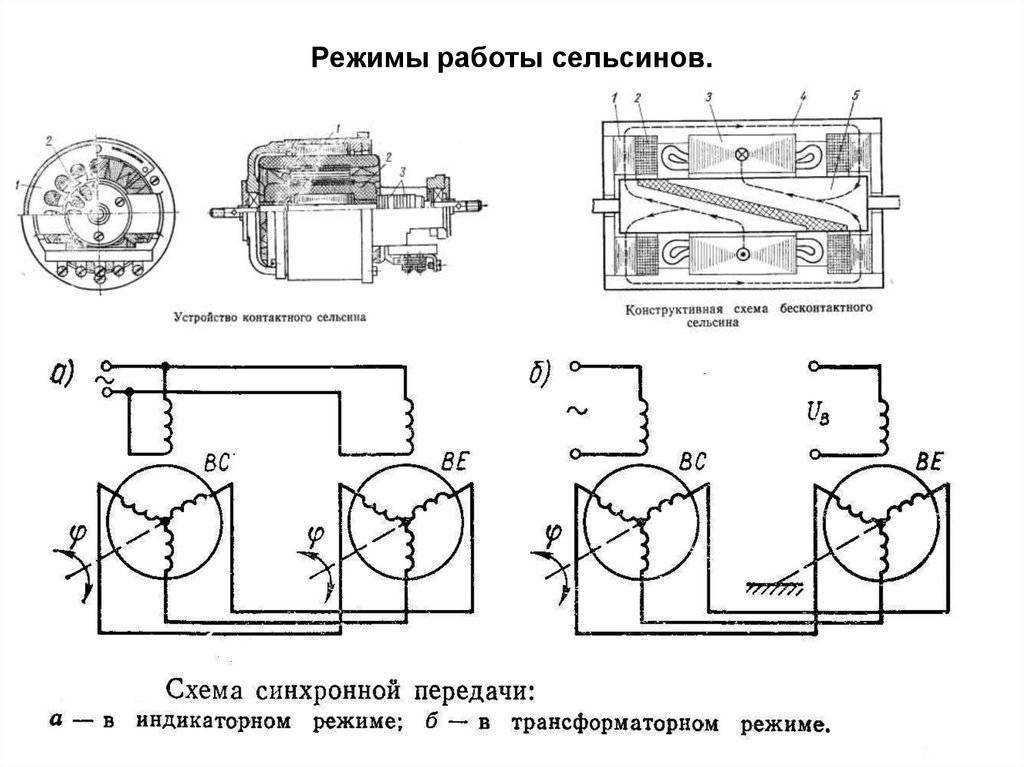
Конструкция. Однофазные сельсины по конструкции и наличию скользящего контакта можно подразделить на контактные и бесконтактные.
Контактные сельсины состоят из двух частей: статора и ротора. На статоре (или роторе) располагают однофазную обмотку возбуждения В (рис. 4.1, а); на роторе (или статоре) – обмотку синхронизации С. Конструктивно они подобны синхронным машинам с электромагнитным возбуждением. У однофазных сельсинов обмотку синхронизации выполняют по типу трехфазной, т.е. три отдельные обмотки смещены в пространстве на 120° и соединены в звезду. Обмотка синхронизации всегда распределенная; обмотка возбуждения может быть и распределенной, и сосредоточенной. Число пар полюсов в сельсине выбирают равным единице (рм=1), чтобы получить самосинхронизацию в пределах одного оборота. Обмотка возбуждения сельсина создает пульсирующий магнитный поток. Этот поток, проходя по магнитопроводу сельсина, пересекает витки обмотки синхронизации и наводит в них трансформаторные ЭДС, зависящие от угла поворота ротора. Так как при повороте ротора взаимоиндуктивность между обмотками возбуждения и синхронизации плавно изменяется по закону косинуса, то в обмотке синхронизации наводятся фазные ЭДС, пропорциональные косинусу угла поворота ротора. У некоторых сельсинов имеется короткозамкнутая демпферная обмотка Д, расположенная перпендикулярно обмотке В. Принцип работы сельсина не зависит от места расположения каждой из обмоток: на статоре или на роторе. Однако наиболее распространены (рис. 4.1, б) сельсины с обмоткой возбуждения 4, расположенной на роторе 3, и обмоткой синхронизации 2 на статоре 1. У них меньше контактных колец 6 и щеток 7, что обеспечивает более высокую надежность, меньший момент трения и объем сельсина. В цепи передачи сигнала (линии связи обмоток синхронизации) отсутствуют скользящие контакты. При такой конструкции проще выполнить на роторе демпферную обмотку 5. Наличие скользящих контактов значительно снижает надежность контактных сельсинов. Поэтому были разработаны также бесконтактные сельсины: с униполярным возбуждением ротора со стороны статора и с переходным кольцевым трансформатором.
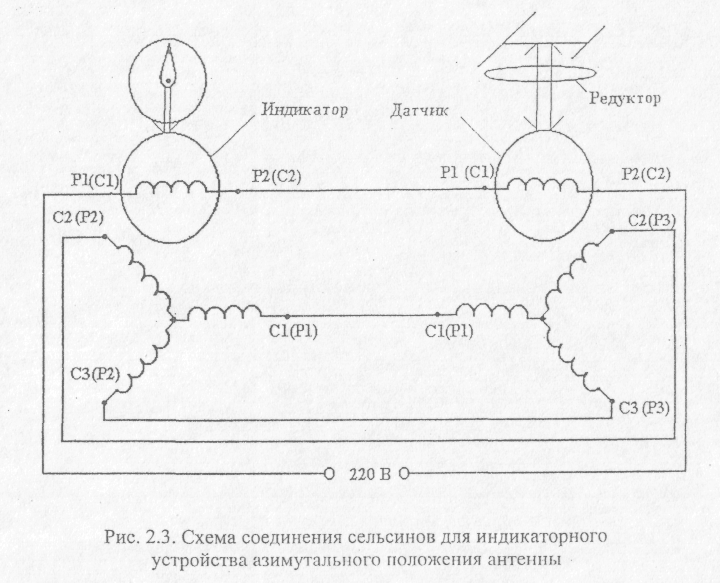
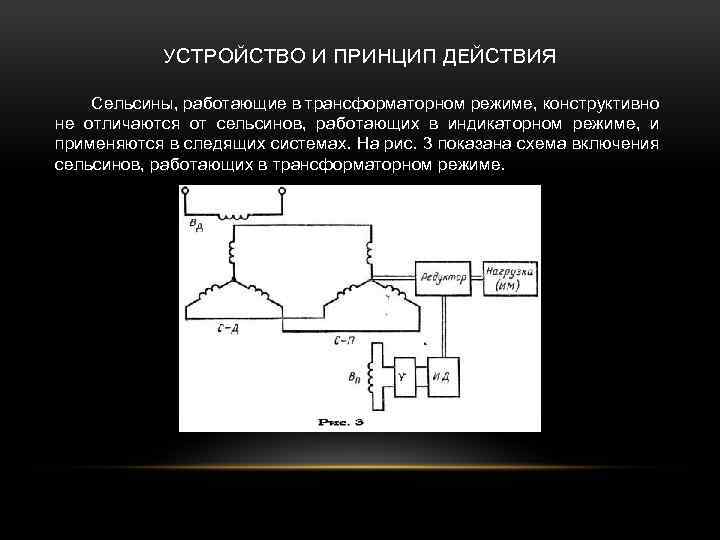
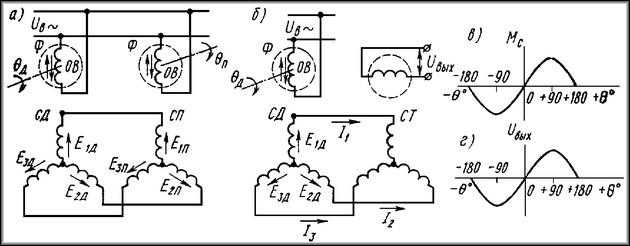
Трансформаторный режим. Для передачи углового перемещения на расстояние с преодолением значительного момента сопротивления используются системы дистанционной передачи угла в виде следящих систем, частью которых являются сельсины, работающие в трансформаторном режиме. При этом по линии связи передается незначительный по мощности сигнал.
На рис. 4.2а приведена схема сельсинов в трансформаторном режиме. Обмотка возбуждения сельсина-датчика СД подключена к питающей сети и служит для создания в магнитной системе пульсирующего магнитного потока. Обмотки синхронизации датчика и приемника соединены между собой строго соответственно линией связи. Однофазная обмотка трансформаторного сельсина-приемника предназначена для выработки сигнала (напряжения), зависящего от угла рассогласования Θ=Θд-Θп, и называется обмоткой управления. В трансформаторном режиме согласованным называют такое состояние схемы, когда ЭДС обмотки управления сельсина-приемника равна нулю. Взаимное расположение обмоток в датчике и приемнике для исходного согласования состояния схемы показано на рис. 4.2б. Пульсирующий магнитный поток обмотки возбуждения датчика Фв индуктирует в обмотке синхронизации фазные ЭДС
Выражение (4.2) является уравнением выходной характеристики Еy=f(Θ) график выходной характеристики при сопротивлении линий связи, близком к нулю (Rл=0), показан на рис. 4.2б сплошной линией
Важной характеристикой сельсинов при работе в трансформаторном режиме является крутизна сельсина-приемника, т.е. приращение выходного напряжения Uy (ЭДС Еy при холостом ходе), приходящееся на единицу угла рассогласования. Крутизна определяется при Θ≤5° и характеризует угол наклона выходной характеристики в начале координат (В/град):
Крутизна определяется при Θ≤5° и характеризует угол наклона выходной характеристики в начале координат (В/град):
У современных сельсинов при холостом ходе Sп= 0,5-2 В/град.
Недостатки, решения
У сельсинов невысокая точность синхронизации, особенно когда на валу сельсина-приёмника присутствует существенная механическая нагрузка.
Для решения этой проблемы сельсинных связей, применяются следящие электромеханические комбинированные связи — приёмный вал вращают вспомогательным электродвигателем, который включается в контур авторегулирования, в этом случае сельсин-приемник выступает в роли датчика угла рассогласования поворотов ведущего и ведомого валов. Т.е. по сути, сельсин в данном случае передаёт только угол поворота, за синхронность вращения валов отвечает авторегулятор, который управляет вспомогательным электродвигателем.
Другой недостаток сельсинов — относительно невысокая точность передачи угла, обусловленная погрешностями изготовления магнитопровода сельсина. Для повышения точности применяют пару сельсинов — «грубый» и «точный» (последний установлен через редуктор и за один оборот основного вала делает несколько оборотов). Если сигнал с грубого сельсина слабее некоторого порога, автоматика передаёт в линию связи сигнал с точного сельсина. Так же, для обеспечения точности, оба сельсина (датчик и приёмник) подключаются через редуктор.
Советуем изучить — Применение автоматизированных систем коммерческого учета электроэнергии
Не имеющий нагрузочного момента ротор сельсина колеблется с частотой питающего переменного тока, поэтому для подавления этих колебаний приходится использовать механические демпферы. Из-за этого, в помещениях, где установлены сельсины, наблюдается постоянный монотонный шум.
В современных устройствах сельсины всё чаще заменяются энкодерами. И только там, где простота, надёжность и ремонтопригодность важнее точности (например, в авиации), сельсины всё ещё находят широкое применение.
Камрад, рассмотри датагорские рекомендации
Внимание! 800 рублей для новичков на Aliexpress Регистрируйтесь по нашей ссылке. Если вы впервые на Aliexpress — получите 800.00₽ купонами на свой первый заказ.. Цифровой осциллограф DSO138
Цифровой осциллограф DSO138
Кит для сборки
Цифровой осциллограф DSO138. Кит для сборки
Функциональный генератор. Кит для сборки
Настраиваемый держатель для удобной пайки печатных плат
Геннадий (hgm0) г.Волжский Список всех статей
Профиль hgm0
Писатель, радиолюбитель, инженер-электроникУвы, вот такой я непостоянный — вечные командировки. Постараюсь быть примерным горожанином. Моя работа связана с Черным континентом, скажем так «геологическая и радиационная разведка, изучение аномальных (во всех смыслах) зон». Чаще о цивилизации нет и намеков — это одна из причин занятий радиоэлектроникой, литературой.



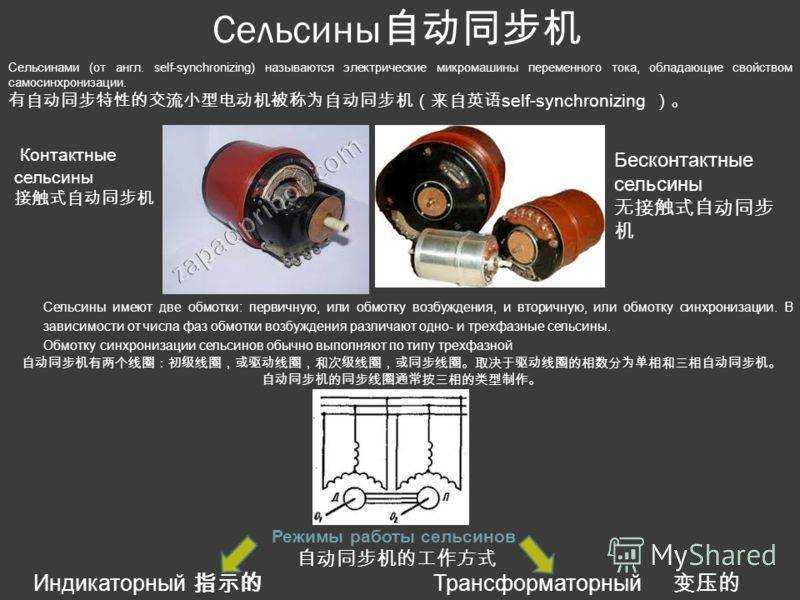
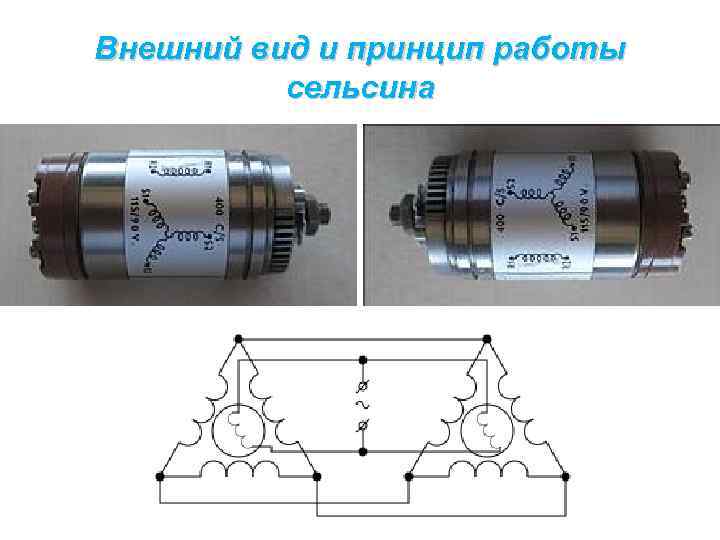
Сельсины: назначение, устройство, принцип действия
Сельсин (от англ. self-synchronizing) — индукционная машина переменного тока системы индукционной связи, которая обладает свойством самосинхронизации (для плавной передачи на расстояние угла поворота вала). Сельсиновые передачи работают аналогично обычным механическим передачам, но крутящий момент между валами сельсинов создаётся не при помощи непосредственно контактирующих шестерён, а посредством изменяющегося магнитного потока. Сельсины применяются в различных отраслях промышленности. Например, в системах автоматического управления и контроля постоянно возникает необходимость синхронного и синфазного вращения или поворота двух и более осей, которые не связаны друг с другом (например, на РЛС — радиолокационных системах с вращающейся антенной). Эти задачи и решаются с помощью систем синхронной связи на базе сельсинов.
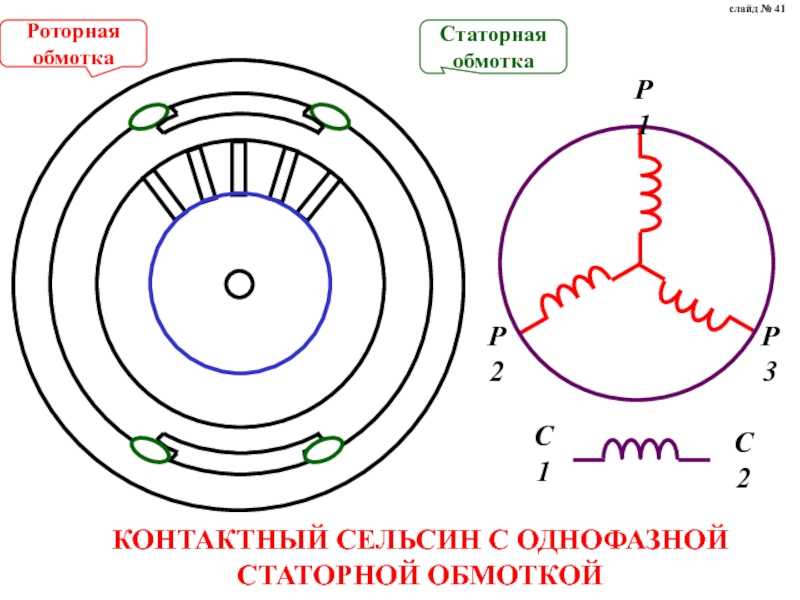
Простейший сельсин состоит из статора с трёхфазной обмоткой (схема включения в электрическую цепь — треугольник или звезда) и ротора с однофазной обмоткой. Два таких устройства электрически соединяются друг с другом одноимёнными выводами — статор со статором и ротор с ротором. На роторы подаётся переменное напряжение от одного источника. При этом вращение ротора одного сельсина вызывает поворот ротора другого сельсина.
Переменный ток в роторе одного из сельсинов (сельсин-датчика) создаёт в обмотках его статора ЭДС, тем самым вызывая переменный ток через соответствующие обмотки статора второго сельсина (сельсин-приёмника). Переменное магнитное поле, создаваемое этим током, взаимодействует с переменным магнитным полем ротора сельсин-приёмника; возникающий вращательный момент пропорционален разнице между положениями роторов датчика и приёмника, и вызывает поворот последнего до тех пор, пока их положения не станут совпадать.
Классификация по роду тока и принципу действия
Как известно, существует два рода электрического тока – переменный и постоянный.
Исходя из этого, электрические машины также подразделяют по роду тока на два вида – машины электрические переменного тока и машины электрические постоянного тока.
Электрические машины переменного тока
Трансформаторы – наиболее широко применимы в сетях электроснабжения для преобразования напряжений (повышение и понижение). Также довольно широко их применяют в выпрямительных установках для согласования напряжений, в устройствах связи, вычислительной техники и автоматики. Часто применяются и для проведения измерений электрических (измерительные трансформаторы), а также для различных функциональных преобразований (трансформаторы вращающиеся).
Асинхронные электродвигатели – самые распространенные в мире благодаря своей относительной простоте и низкой стоимости. Применяются в промышленных электроустановках (станки, краны, подъемные машины) и в бытовых (компрессора холодильников, вентиляторы, пылесосы). Довольно широкое применение получили однофазные и двухфазные асинхронные управляемые электродвигатели, а также сельсины и тахогенераторы асинхронные.

- Синхронные электродвигатели – наиболее часто применяемы в качестве генераторов электрического тока на электрических станциях. Также применимы в качестве генераторов повышенной частоты в различных источниках питания (например, на кораблях, тепловозах, самолетах). Также в электроприводах большой мощности применяют синхронные электродвигатели, которые могут также помимо выполнения полезной работы и также влиять на коэффициент мощности сети cos φ.
- Коллекторные машины – используют их только в качестве электродвигателей. Это вызвано сложностью их конструкции и необходимостью тщательного ухода. В бытовых электроприборах и устройствах автоматики применяются универсальные коллекторные электродвигатели, способные работать на двух родах тока – постоянном и переменном.
Электрические машины постоянного тока
Они работают практически во всех сферах промышленности и транспорта.
В связи с большим распространением машин постоянного тока также были распространены и генераторы постоянного тока. Они использовались в качестве источников постоянного напряжения для зарядки аккумуляторных батарей, на транспорте (тепловозы, теплоходы и другие), а также в промышленности (система генератор — двигатель). Ввиду развития полупроводниковой техники генераторы постоянного тока постепенно вытесняются из работы и активно заменяются на генераторы переменного тока работающих в паре с полупроводниковым преобразователем.
Также применяются электродвигатели постоянного тока и в системах автоматического управления АСУ в качестве усилителей электромашинных, тахогенераторов и исполнительных электродвигателей.
Электрические микромашины
Микромашины активно применяются в устройствах автоматических.
Их подразделяют на группы:
Силовые микродвигатели – приводят во вращения механизмы различных автоматических устройств. Например, самопишущие устройства и другие.

- Исполнительные (управляемые) микромашины – выполняют преобразование энергии электрической в механическую, то есть ведут обработку определенных команд из вне.
- Тахогенераторы – преобразуют механическую энергию вращения вала в электрический сигнал напряжения, который пропорционален скорости вращения вала.
- Вращающиеся трансформаторы – на выходе этих трансформаторов устанавливается напряжение, пропорциональное функции углу поворота ротора, например синусу или косинусу данного угла или же самому углу.
- Машины синхронной связи – (магнесины или сельсины) осуществляют синфазный и синхронный поворот или же вращения нескольких осей, не имеющих между собой механической связи.
- Микромашины гироскопических приборов – вращают роторы гироскопов с довольно высокой частотой, а также производят коррекцию их положения.
- Электромашинные усилители и преобразователи.
Читательское голосование
Статью одобрили 8 читателей.
Для участия в голосовании зарегистрируйтесь и войдите на сайт с вашими логином и паролем.
Информация
Вы не можете участвовать в комментировании. Вероятные причины:
— Администратор остановил комментирование этой статьи.
— Вы не авторизовались на сайте. Войдите с паролем.
— Вы не зарегистрированы у нас.
Зарегистрируйтесь.
— Вы зарегистрированы, но имеете низкий уровень доступа.
Получите полный доступ.



- Арменский Е. В., Фалк Г. Б. Электрические микромашины: Учебн. пособие для студентов электротехнических специальностей вузов. — 3-е, перераб и доп. — М. : Высшая школа, 1985. — 231 с. — 22 000 экз.
- Электротехнические изделия / Под общ. ред. профессоров МЭИ (Гл. ред. И. Н. Орлов). — М. : Энергоатомиздат, 1986. — 712 с. — 90 000 экз. — УДК 621.3; Э 45;(G).
- Электровоз ВЛ80С. Руководство по эксплуатации / Н. М. Васько. — М. : Транспорт, 2001. — 454 с.
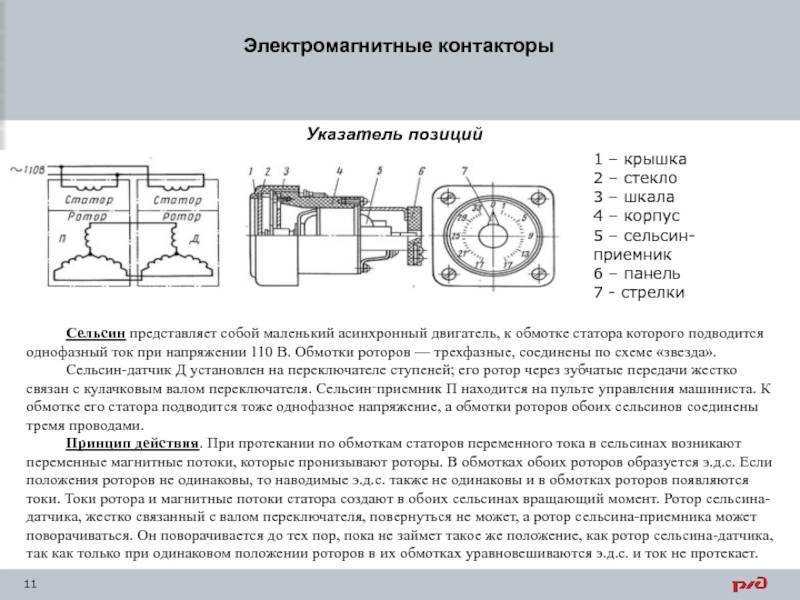
Общие сведения, классификация
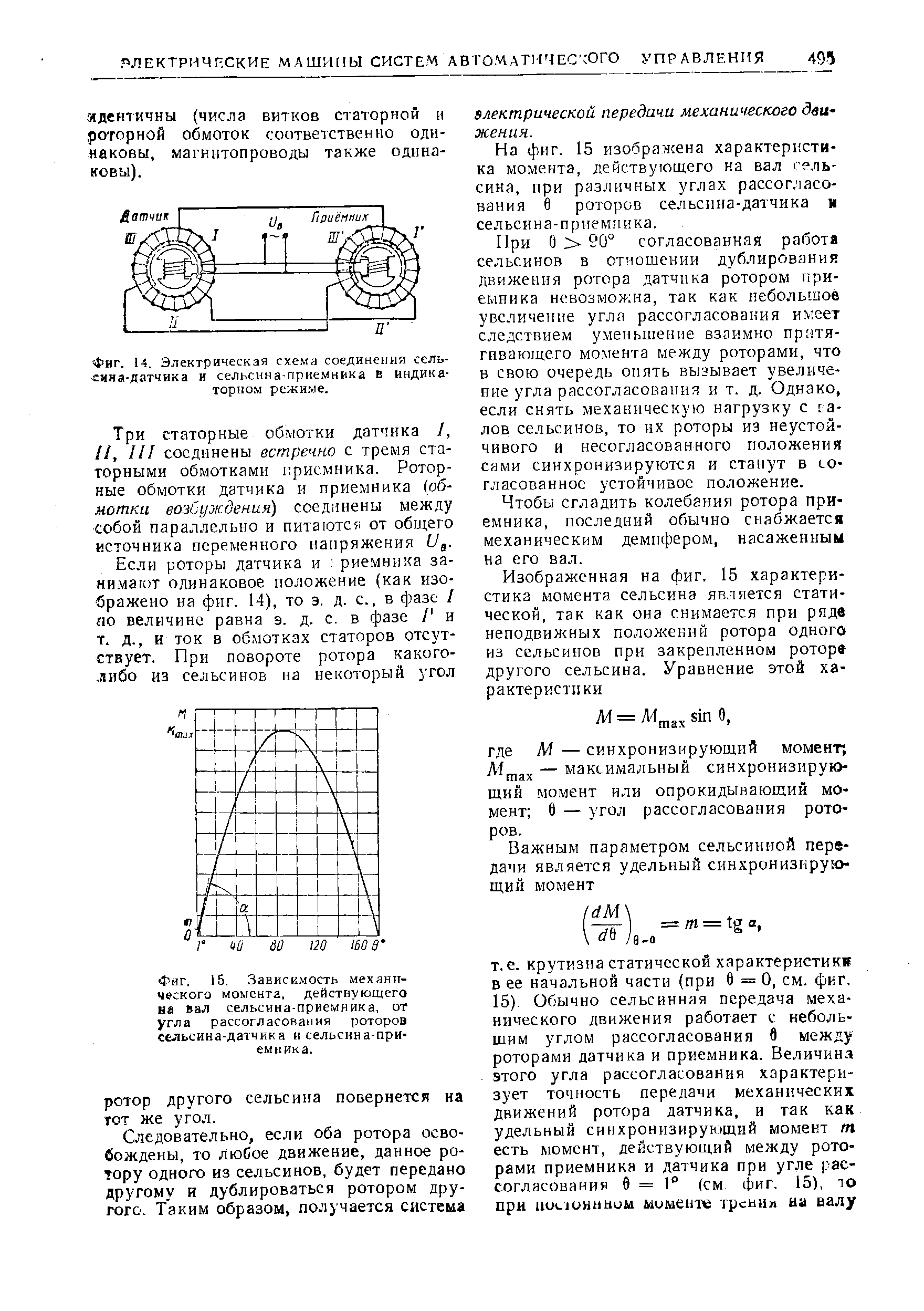
Машины синхронной связи предназначены для осуществления синхронного или синфазного поворотов двух осей, механически между собой не связанных, или для их вращения. Индукционные системы синхронной связи делятся на трехфазные и однофазные. Трехфазные системы применяются для синхронизации двух валов приводных двигателей, не связанных механически. Обычно это силовые системы относительно большой мощности, носящие название систем электрического вала. Их используют, например, в механизмах разводки мостов, ворот шлюзов, в установках бумажной промышленности и т. д. Однофазные системы применяются в маломощных установках и широко используются в схемах автоматических устройств. Микромашины, применяемые в индукционных системах синхронной связи в качестве датчиков и приемников, получили название сельсинов, подчеркивающее их способность к самосинхронизации (self synchron означает самосинхронизирующийся). В теории синхронной связи автоматических устройств различают два понятия: синхронную индикаторную передачу — индикаторный режим сельсинов и следящий привод — трансформаторный режим сельсинов. В первом случае требуется передать лишь незначительный момент, необходимый, например, для поворота стрелки прибора (индикатора) для указания на расстоянии положения какого-либо регулирующего органа — клапана, задвижки, заслонки, вентиля и т. д. Передача показаний на пульт управления особенно важна в случаях, когда по каким- либо причинам человек не может подойти к регулируемому органу. Схема синхронной индикаторной передачи дана на рисунке 347. Здесь сельсин-датчик Д (заводящее устройство) и сельсин-приемник П (отрабатывающее устройство) при угле заводки а отрабатывают пропорциональный угол са непосредственно, то есть стрелка индикатора находится на оси приемника П. При необходимости передать угол поворота механизму, к валу которого приложен более или менее значительный момент сопротивления, использовать индикаторную схему можно лишь при мощных силовых сельсинах. Мощной должна быть и линия связи. Рациональнее и проще поступить иначе: от датчика к приемнику передать слабый по мощности сигнал, который затем, будучи усилен, воздействует на исполнительный двигатель, связанный с приводным механизмом. В такой системе следящего привода схема связи построена так, чтобы напряжение приемника П (сигнал) было функцией угла поворота ротора датчика Д. Кроме того, между приемником и исполнительным двигателем должна быть обратная связь, приводящая роторы датчика и приемника в согласованное положение (положение нулевого сигнала) по окончании отработки. Схема следящего привода дана на рисунке 348. На заводящем устройстве Д, возбуждаемом напряжением сети, осуществляется механический поворот на угол а (угол заводки). Сигнал, выработанный в отрабатывающем устройстве Я, после предварительного усиления в усилительном устройстве УУ в виде напряжения управления подается на исполнительный двигатель ИД, возбуждаемый напряжением сети. Исполнительный двигатель, будучи соединен механически с валом нагрузки, приводит его во вращение.
Рис. 347. Схема синхронной индикаторной передачи. Рис. 348. Схема следящего привода.
Советуем изучить — Оперативно-диспетчерское управление энергосистемой – задачи, особенности организации процесса
Благодаря механической обратной связи исполнительного двигателя с отрабатывающим устройством П будет постепенно уменьшаться напряжение управления, и, когда отрабатывающее устройство П повернется на угол заводки a, Uy станет равным нулю и исполнительный двигатель остановится. В результате произойдет поворот вала нагрузки на угол а или пропорциональный ему са. Индукционным системам синхронной связи присущ ряд положительных свойств: отсутствие искровой коммутации, то есть разрывов цепи питания датчиков при работе системы; высокая точность, обеспечивающая малые углы ошибки между положениями роторов датчика и приемника в согласованном режиме (не выше 2,5° для машин низшего класса); плавность отработки приемником поворота датчика; возможность иметь датчик и приемник бесконтактными; однотипность датчика и приемника.


Системы синхронного поворота: основные режимы
Сельсины работают в двух режимах. Каждый из них имеет свои особенности которые надо обязательно учитывать при выборе оборудования.
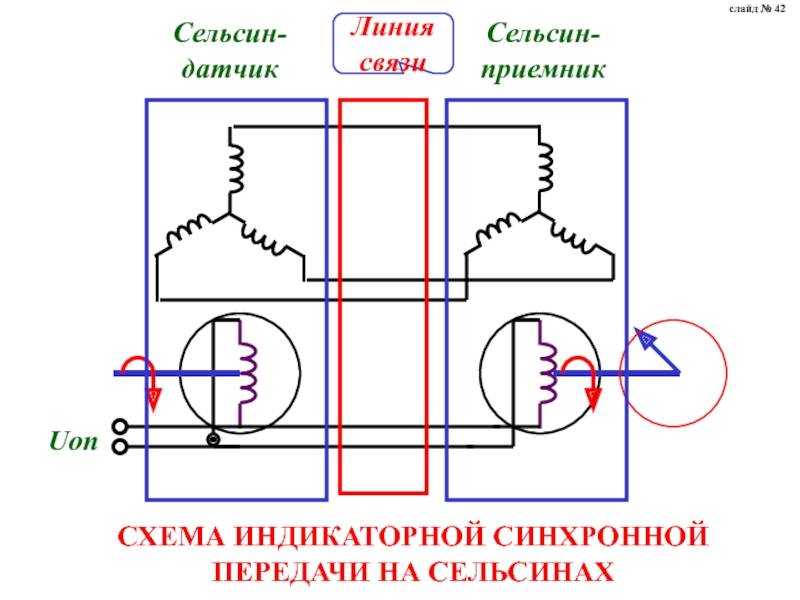
Индикаторный
Если оборудование работает в данном режиме, значит, ротор принимающего устройства подсоединен к ведомой оси. Схема актуальна при выборе для ведомой оси минимального момента торможения и размещение на ней индикаторной стрелки. Обмотки возбуждения подключают к общей цепи. Синхронизирующие объединяют с линией связи.
Формируемые магнитные потоки инициируют возникновение ЭДС на обмотках всех фаз. Незначительная рассогласованность приводит к протеканию электротока. Благодаря потоку в датчиках и принимающем элементе сельсина образуются разнонаправленные моменты. С их помощью удается полностью нивелировать угол рассогласования.
Ротор, располагающийся на датчике, затормаживают. Как итог, момент синхронизации влияет на механизм, поворачивающий ведущую ось. Благодаря подобному конструктивному исполнению удается обеспечить одновременный поворот на одинаковый угол роторов обоих подключенных элементов.
Трансформаторный
Электросигнал, появляющийся при рассогласованности роторов, сначала поступает на усиливающую часть схемы. Далее — на ротор исполнительного механизма. Последний начинает поворачивать ротор принимающего элемента и ведомую ось до полного нивелирования имеющейся разницы. Подобный режим актуален при прикладывании к ведомой оси момента торможения, имеющий достаточно большую величину. То есть помогает повернуть механизм.
Обмотку датчика соединяют с ведущей осью и подключают к электросети на 220 В. Для подачи напряжения на элемент, отмечающий за управление двигателем, задействуют усилитель. Обмотку приемника используют для присоединения сельсина. Для объединения обмоток синхронизации двух сельсинов используется линия связи. В возбуждающей обмотке индуцируется ток, создающий в синхронизирующей обмотке ЭДС.
Ток протекает по обоим элементам, так как их обмотки соединены. В принимающем элементе формируются магнитные импульсы. Если элементы рассогласованы, под действием потока в обмотке возникает ЭДС. На входе появляется напряжение, запускающее специальный усиливающий элемент. От него напряжение поступает на статор, принадлежащий исполнительному устройству. Это приводит к тому, что ведомая ось начинает поворачиваться следом за ротором приемника. По мере устранения имеющейся разницы, напряжение становится равным нулю, и вращение ведомой оси прекращается.
Особенности используемой технологии и конструкция влияют на величину погрешности. К таковым относят:
- Разность между параметрами датчика и принимающего устройства;
- Неравномерные показатели магнитной проводимости;
- Отсутствие симметричности у обмоток.
При передаче угла неизбежно возникают погрешности. Их появление обусловлено определенными условиями эксплуатации. При изменении величины сопротивления в сети управления, порядок работы сельсинов изменится.