
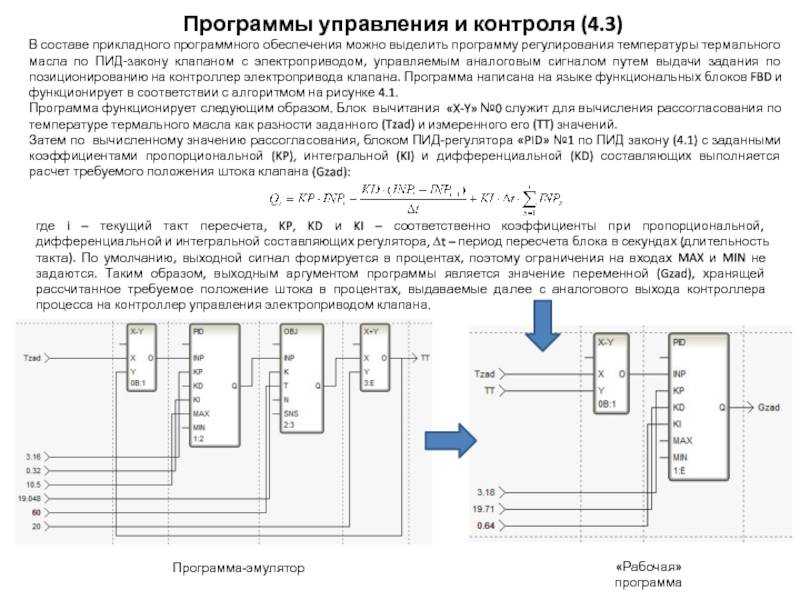
Пример применения ПИД-регулятора в частотно-регулируемом приводе насоса
Схемы преобразователей частоты содержат управляющие контроллеры, которые могут обеспечить работу устройства в режиме ПИ или ПИД-регулятора. Специализированные частотники часто уже имеют предустановленные настройки, которые корректируют после установки оборудования.
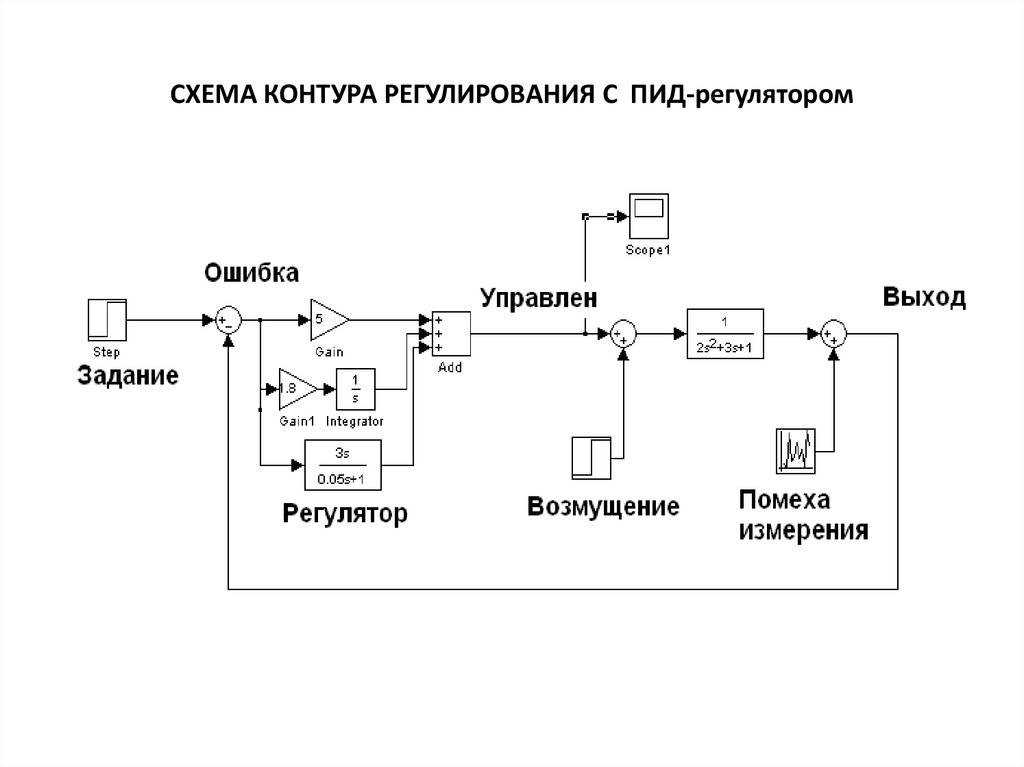
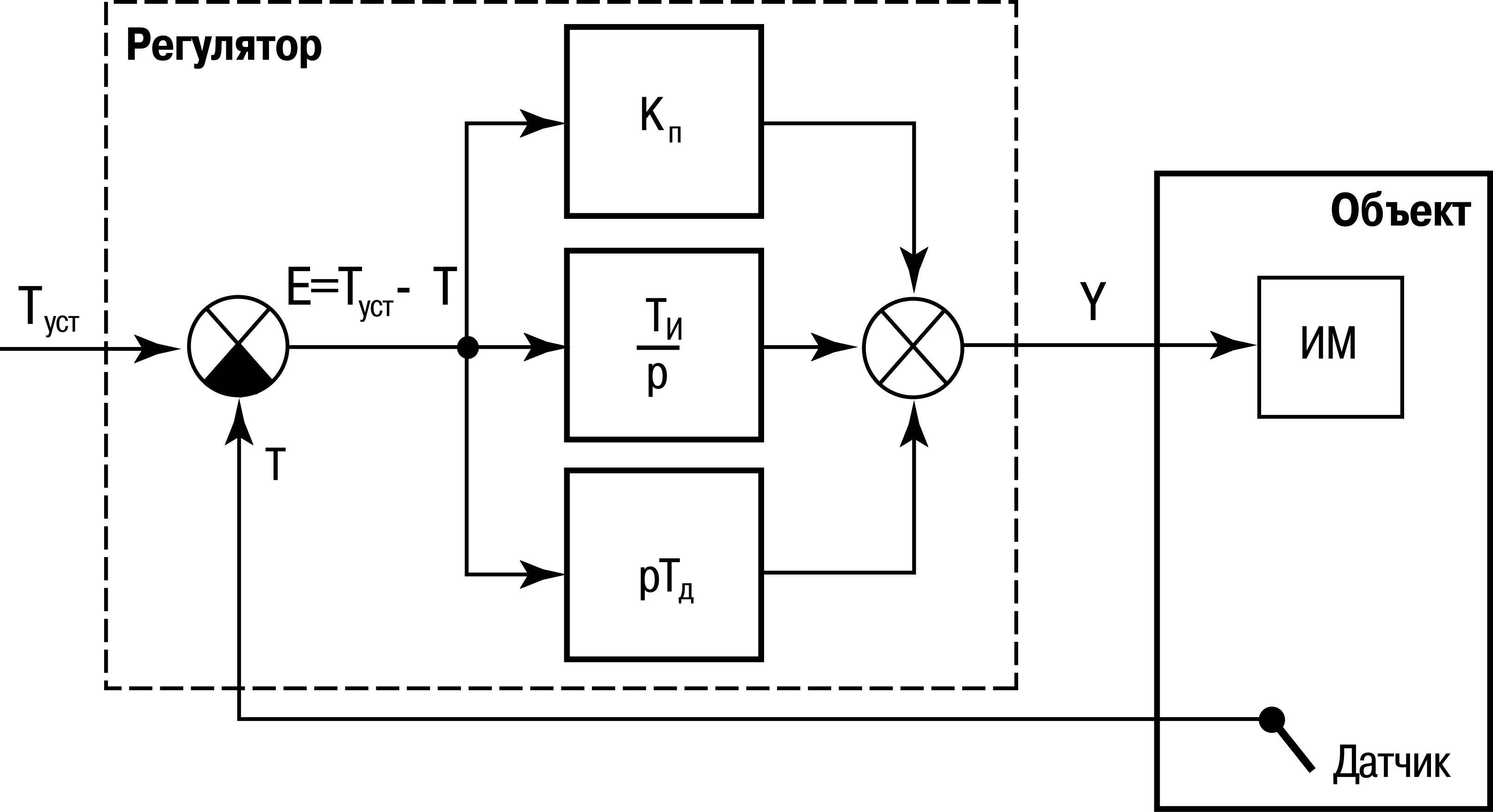
На рисунке представлена простейшая ПИД схема управления насосом по давлению. К аналоговым входам подключены датчик, установленный на напорном трубопроводе, и внешнее задающее устройство. Требуемое значение давления также можно задавать в настройках регулятора. При изменении регулируемого параметра на контроллере, сравнивающим сигнал обратной связи с заданным значением, формируется управляющий сигнал.
Преобразователь изменяет производительность насоса путем увеличения или снижения частоты питающего напряжения электродвигателя до тех пор, пока давление в системе не достигнет заданного значения. Таким образом, давление в системе не зависит от расхода.
Приведенная схема сильно упрощена. Частотные преобразователи с ПИД-регулятором могут управлять производительностью по нескольким параметрам. Например, насосы в отопительных системах могут регулироваться по температуре теплоносителя и тепловому режиму на улице и в помещении и давлению.
Преобразователи частоты с функциями ПИД-регулятора применяют также в сложных системах регулирования тягодутьевых систем и других АСУТП.
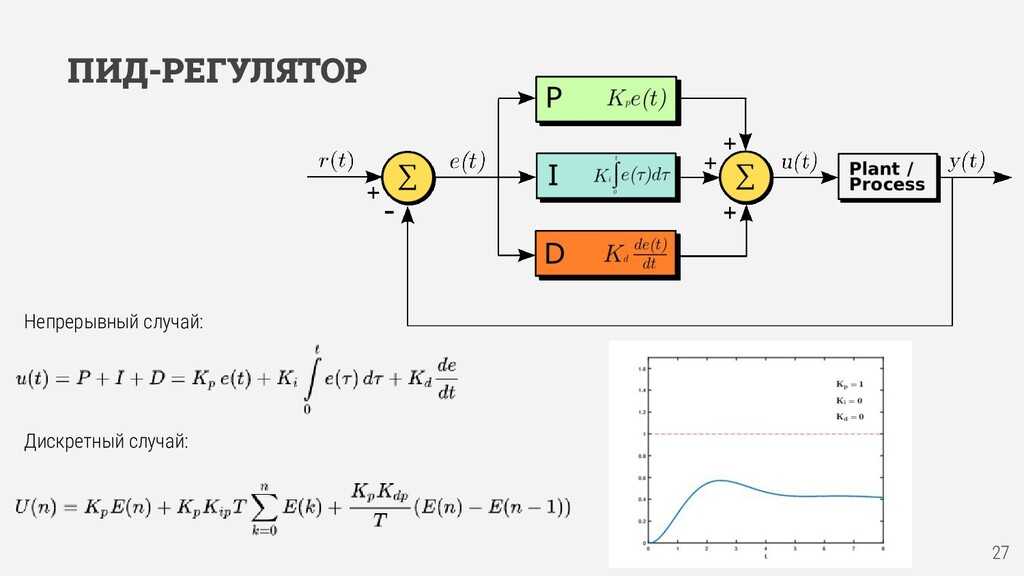
ПИД регулятор – один из самых распространенных автоматических регуляторов. Он настолько универсален, что применяется практически везде, где нужно автоматическое управление. Например температурой: специальные печи, холодильники, инкубаторы, паяльники, сопло и стол 3D принтера, ИК паяльные станции и прочее. Поддержание частоты оборотов мотора, например для станков. Всевозможные балансирующие штуки, гироскутеры, сигвеи, левитирующие магнитные платформы, и конечно же квадрокоптеры и самолёты с автопилотом. Это всё ПИД регулятор. Почему именно ПИД? Существуют и другие регуляторы, превосходящие ПИД по адаптивности к управляемой системе и стабильности, например линейно квадратичный. Но, чтобы грамотно синтезировать такой регулятор, нужно быть гораздо больше чем “семи пядей” во лбу, а настройка ПИД регулятора дело хоть и неприятное, но фактически очень простое и под силу любому, а сам ПИД регулятор универсален для почти любого процесса.
Сравнение ПИД –регулятора с позиционным регулированием
В системах АСУ ТП наибольшее распространение получили два типа регуляторов – двухпозиционный и ПИД.
Двухпозиционный регулятор наиболее простой в использовании и широко распространенный.
Данный тип регулятора сравнивает значение входной величины с заданным параметром уставки. Если значение измеренной величины ниже заданного значения уставки, регулятор включает исполнительное устройство, при превышении заданного значения, исполнительное устройство выключается. Для предотвращения слишком частого срабатывания устройства, в следствии колебаний системы и следовательно изменении значений, задается минимальный и максимальный порог срабатывания — гистерезис, или по другому зона нечувствительности, мертвая зона, дифференциал. Например, нам необходимо поддерживать температуру в 15°С. Если гистерезис задан 2°, то регулятор будет включать нагрев при 14°С и отключать соответственно при 16°С.
Чем меньше значение гистерезиса, тем точнее будет процесс регулирования, но увеличивается частота срабатывания ,что в конечном итоге приводит к износу коммутационных аппаратов. Увеличение гистерезиса уменьшит частоту переключений, но при этом увеличивается амплитуда колебаний регулируемого параметра, что приведет к ухудшению точности регулирования.
Так или иначе, при таком типе регулирования происходят незатухающие колебания, частота и амплитуда которых зависит от параметров системы. Поэтому данный метод обеспечивает хороший результат в системах, обладающих инерционностью и малым запаздыванием. В частности, такой метод широко применяется при регулировании температуры в нагревательных печах.
В отличии от двухпозиционного с помощью ПИД-регулятора удается свести колебания системы к минимуму, благодаря тому, что при таком методе регулирования учитываются различные значения системы — фактическая величина, заданное значение, разность, скорость. Это позволяет стабилизировать систему и добиться повышения точности в десятки раз по сравнению с двухпозиционным методом. Конечно, здесь многое зависит от правильно подобранных коэффициентов ПИД регулятора.
Для того, чтобы правильно выбрать необходимый тип регулятора необходимо хотя бы приблизительно знать характеристики управляемого объекта , требования к точности регулирования, характер возмущений, воздействующих на объект регулирования.
Настраиваем интегральный коэффициент
При настройке двух предыдущих коэффициентов можно получить практически идеальную кривую регулирования или близкую к ней кривую, удовлетворяющую условиям задачи. Однако, как правило возникает так называемая «статическая ошибка». При этом в нашем примере температура стабилизируется не на заданном значении 25 °С, а на несколько меньшем значении. Дело в том, что если температура станет равной уставке (то есть разность текущей и заданной температур станет равна 0), то пропорциональная и дифференциальная составляющая будут равны нулю (см. функцию преобразования ПИД-регулятора). При этом мощность регулятора тоже станет равна 0 и он начнёт остывать.
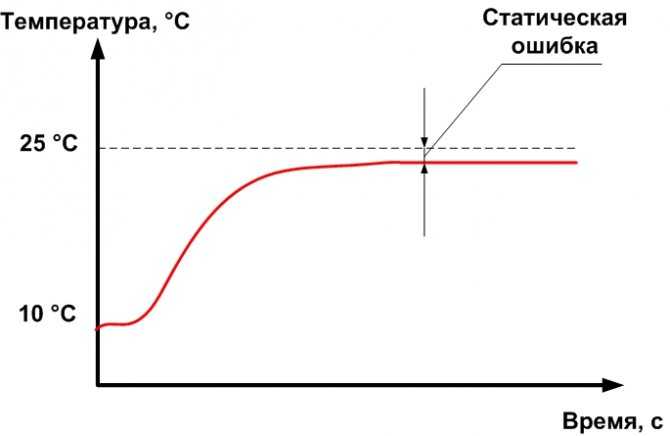
Для того чтобы исключить этот эффект, используют интегральную составляющую. Её необходимо постепенно увеличивать до исчезновение статической ошибки. Однако, чрезмерное её увеличение тоже может привести к возникновению скачков температуры.
ТРМ210: Функциональная схема прибора
Краткий экскурс в теорию закончен, вернёмся к практике и рассмотрим прибор ТРМ210, реализующий данный алгоритм.

Вот его функциональная схема:
 Информация с датчика преобразуется прибором с помощью шкалы масштабирования, проходит фильтрацию и коррекцию. Это необходимо, чтоб ПИД-алгоритм получил измеренное значение в удобном и понятном для него виде.
Информация с датчика преобразуется прибором с помощью шкалы масштабирования, проходит фильтрацию и коррекцию. Это необходимо, чтоб ПИД-алгоритм получил измеренное значение в удобном и понятном для него виде.
Значение измеренной величины отображается на дисплее прибора.
Управляющее воздействие регулятора может быть импульсным или аналоговым. В первом случае управляющее воздействие регулятора заключается в изменении ширины генерируемых на выходе импульсов. Во втором случае регулятор выдаёт сигнал унифицированного напряжения в диапазоне 0…10 В или тока в диапазоне 4…20 мА. С помощью этих сигналов можно управлять практически любым устройством.
В ТРМ210 предусмотрен блок сигнализации, который сообщает о выходе физической величины за заданные пределы, замыкая дискретный выход, который, например, может «зажигать» лампу «Авария».
Также в приборе имеется блок регистратора, который может передавать измеренное значение физической величины любому другому прибору или устройству с помощью токового сигнала 4…20 мА.
В дополнение ко всему выше перечисленному регулятор имеет «на борту» интерфейс RS-485, который позволяет читать с прибора значения измеряемой величины, выходной мощности регулятора и любых конфигурируемых параметров. Это может пригодиться, если нужно передавать информацию о работе прибора в диспетчерский пункт.
Примечания и советы
В логах черного ящика высокие колебания P не выглядят как острые пики или большие волны. Эти колебания сначала проявляются в самом верху диапазона газа и выглядят как узкие синусоидные волны. Когда они появляются в логах, их еще не видно визуально или на слух, поэтому при начальной настройке (визуально и на слух) рекомендуется сначала достичь точки визуальных и звуковых колебаний, а затем снизить значения до 70%. К моменту, когда все колебания будут видны визуально или на слух, то в логах это тоже будет отчетливо отображаться.
Death Rolls (крен смерти)
Наиболее частой причиной, по которой квадрокоптер переворачивается и не останавливает двигатели — слишком низкое минимальное значение газа (throttle). Регулятор оборотов не может запустить двигатель после команды с низким значением газа (газ был какое-то время на 0). В журнале черного ящика, это отображается, как-будто двигатель управляется полным газом, но дрон продолжает крутиться. Первое, что нужно сделать, это увеличить настройку min_throttle (значение параметра Idle % при работе протокола DSHOT).
Вторая причина — либо плохой двигатель, либо плохой ESC, либо даже ослабленное крепление луча рамы. В этом случае, вы увидите в логах Blackbox, что двигатель как бы на полном газе, но луч рамы опускается (если включен акселерометр), что указывает на то, что двигатель не имеет тяги. Для проверки замените двигатель или регулятор оборотов.
Третья причина — неудачная комбинация ESCмотор. Некоторые регуляторы оборотов просто не могут работать с современными двигателями. Здесь поможет только замена ESC на другой.
Дополнительная информация для версии BetaFlight 3 (3.0 и 3.1)
- PID-настройки по умолчанию очень хорошо настроены и работают на большинстве квадрокоптеров и для них требуется лишь незначительная настройка.
- Параметр Р у Roll и Pitch могут быть довольно высокими без возникновения дополнительных колебаний, поэтому их можно увеличивать до тех пор, пока не пропадут эти самые колебания при их присутствии. Этот параметр можно увеличить под самый потолок, пока у вас D на минималках и вы не получите новые колебания при резком управлении стиками.
- Настройка Yaw может потребовать настройки нижнего предела yaw_accel_limit и yaw_p_limit, особенно для двигателей большой мощности и высокого рейтинга KV.
- Некоторые мощные системы и сборки не работают с PID по умолчанию и требуют настройки с нуля, как написано выше по шагам, например, система гоночных двигателей DJI Snail System:
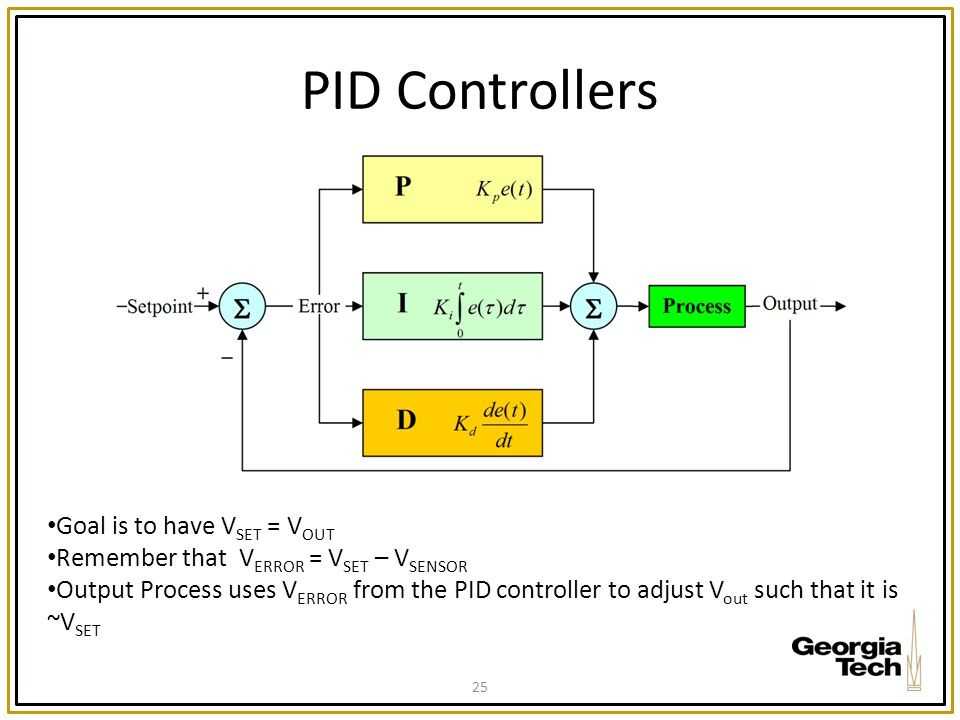
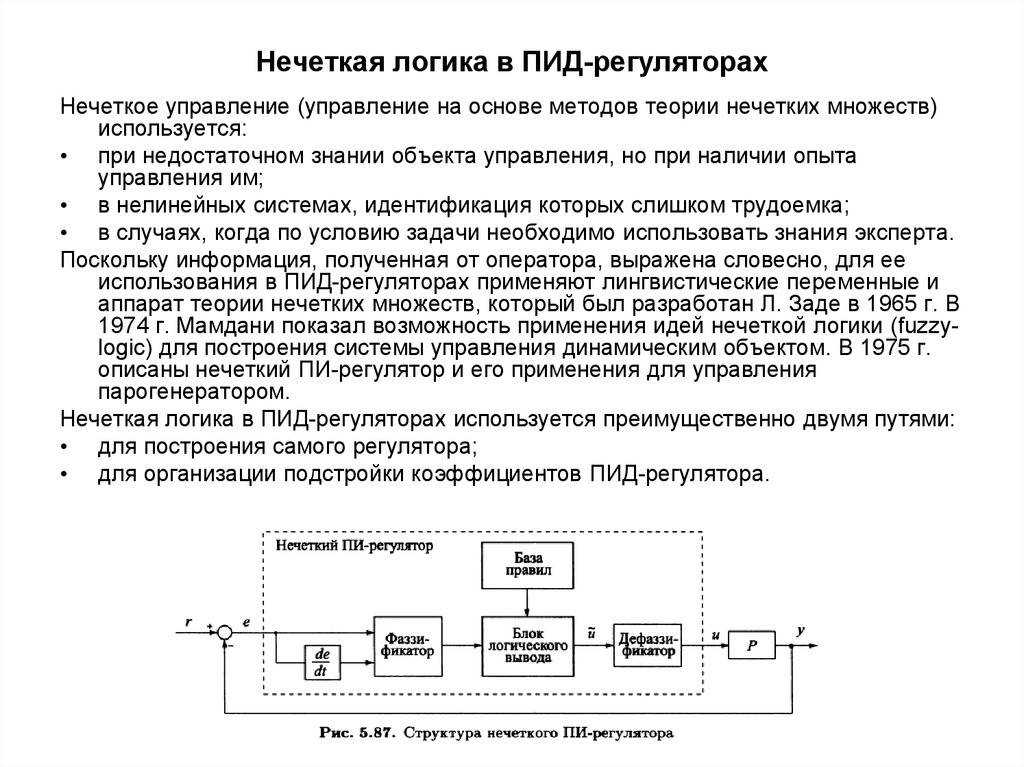
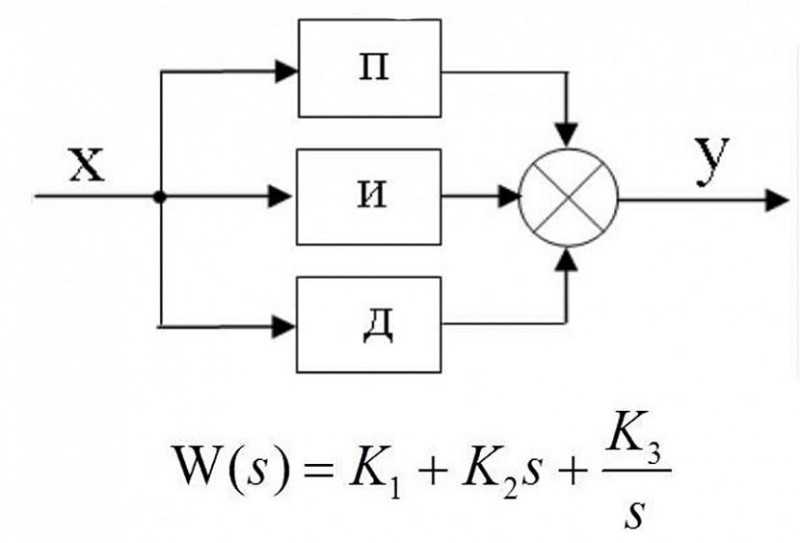
Три составляющих рабочего процесса ПИД-регулятора
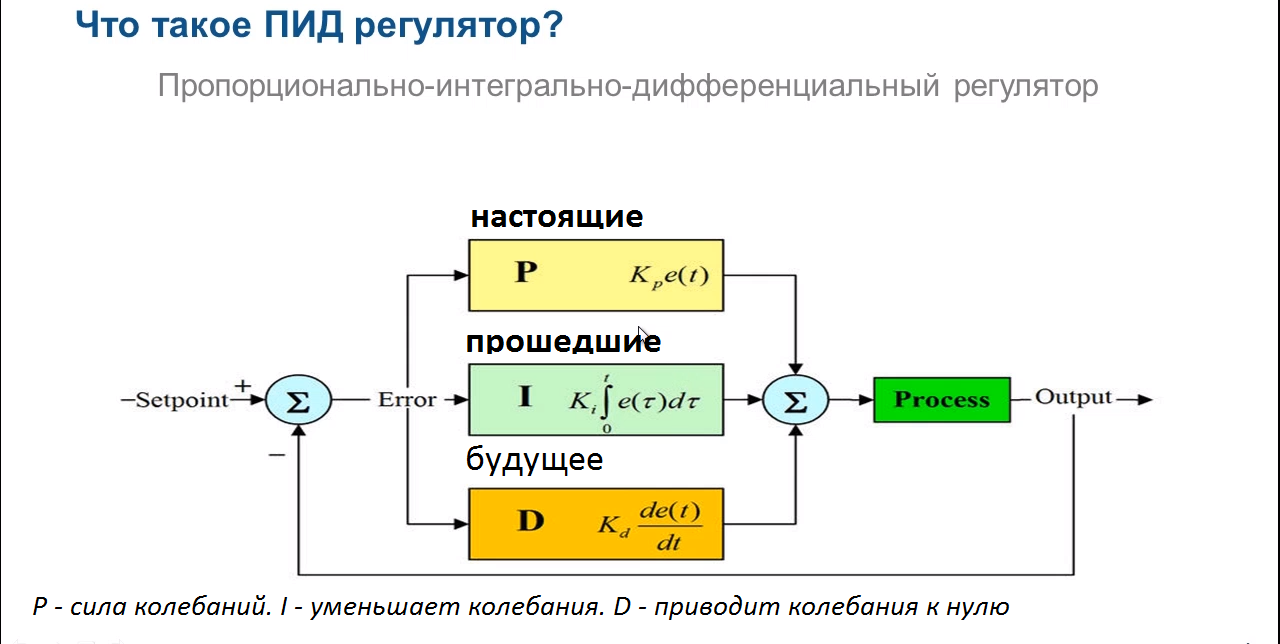
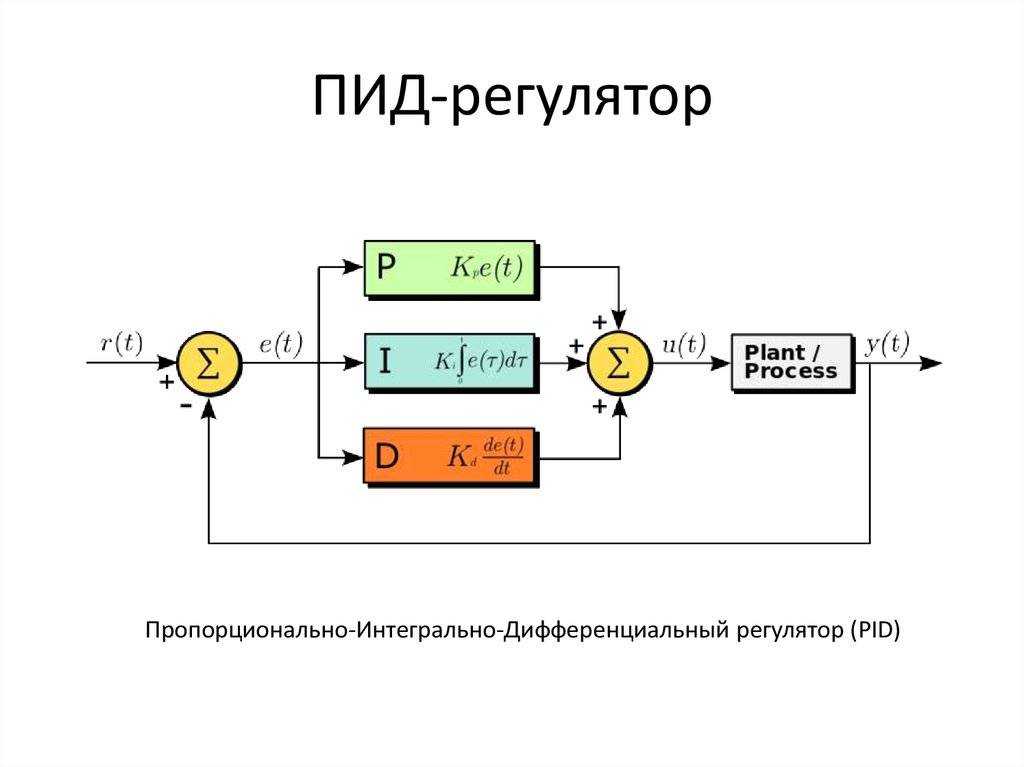
Формирование выходного сигнала осуществляет пропорциональная составляющая. Данный сигнал удерживает входную величину, подлежащую регулировке, на нужном уровне и не дает ей отклоняться. С повышением этого отклонения возрастает и уровень сигнала.
Если на входе регулируемая величина сравняется с заданным значением, то уровень выходного сигнала будет равен нулю. Однако на практике невозможно отрегулировать нужную величину с помощью лишь одной пропорциональной составляющей и стабилизировать ее на определенном уровне. Всегда существует вероятность статической ошибки, равной величине отклонения, поэтому стабилизация выходного сигнала останавливается на этом значении.


Данная проблема решается за счет использования второго, интегрирующего компонента. Его основным элементом является интеграл по времени, взятый от общей величины рассогласования. То есть, интегральная составляющая находится в пропорции с этим интегралом. Данный компонент способен ликвидировать статическую ошибку, так как регулятор постепенно накапливает учет статической погрешности.
Таким образом, при отсутствии внешних воздействий, через определенный период времени регулируемая величина будет приведена в стабильное состояние на отметке правильного значения. В этом случае величина пропорциональной составляющей будет нулевой, а интегрирующая полностью обеспечивает точность выходных данных. Однако и она может вызвать неточности, требующие исправления, в случае неправильного выбора коэффициента.
Эти отклонения устраняются за счет третьих – дифференциальных составляющих, пропорциональных с темпом изменяющегося отклонения величины. Она препятствует отклонениям, возможным в перспективе под влиянием задержек или внешних воздействий. Все три компонента дискретно связаны между собой.
Настраивание ПИД-регулятора общего вида
Для такого поддержания давления существует прибор, который называется регулятором задания. Давление в трубах на датчике идет в сравнение с параметром заданного давления. Регулятор сравнивает системное давление с давлением задания, определяет задачу скорости для двигателя для изменения ошибки. Простой вид регулятора применяет план действий ПИД-регулирования. В нем применяются три составляющие типа регуляторов для удаления ошибки: дифференциальный, интегральный и пропорциональный регулятор.

Регулятор пропорционального типа
Такой регулятор – главный, скорость задается в прямой зависимости от ошибки. При применении пропорционального регулятора система будет иметь ошибку. Малые значения коэффициента регулятора пропорционального типа дают вялость системы, а высокие параметры к колебаниям и нестабильности системы.

Регулятор интегрального типа
Такой регулятор применяется для удаления ошибки. Скорость увеличится до удаления ошибки (снизится при негативной ошибке). Небольшие значения суммирующей составляющей слишком оказывают влияние на деятельность регулятора в общем. При установлении больших значений происходит промахивание системы, она функционирует с перерегулированием.
Регулятор дифференциального типа
Такой регулятор измеряет скорость корректировки ошибки, применяет для повышения системного быстродействия, увеличивает регуляторное быстродействие в общем. Во время увеличения быстродействия регулятора повышается перерегулирование. Это обуславливает к системной нестабильности. Во многих случаях составляющая дифференциальная становится равной нулю или близкой к наименьшему значению для того, чтобы предотвратить это состояние. Она бывает полезной в позиционирующей системе.

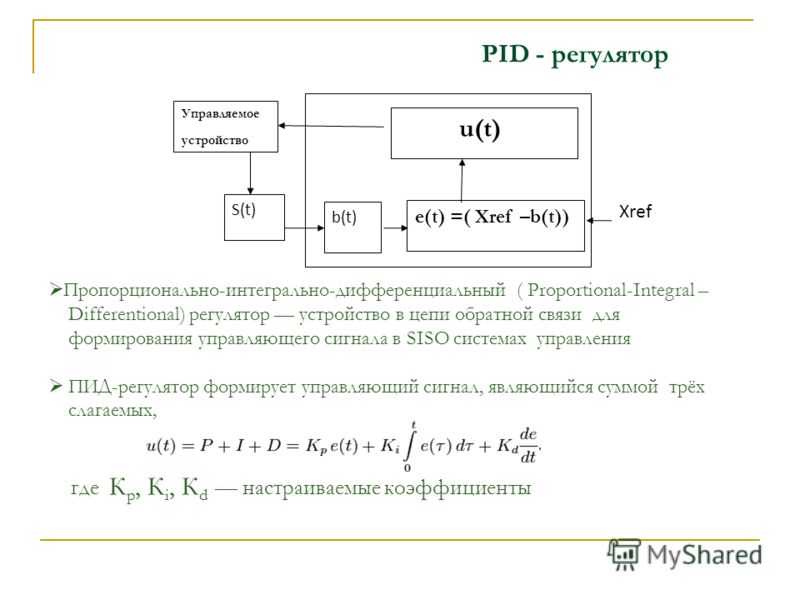
Принцип работы и физическая составляющая
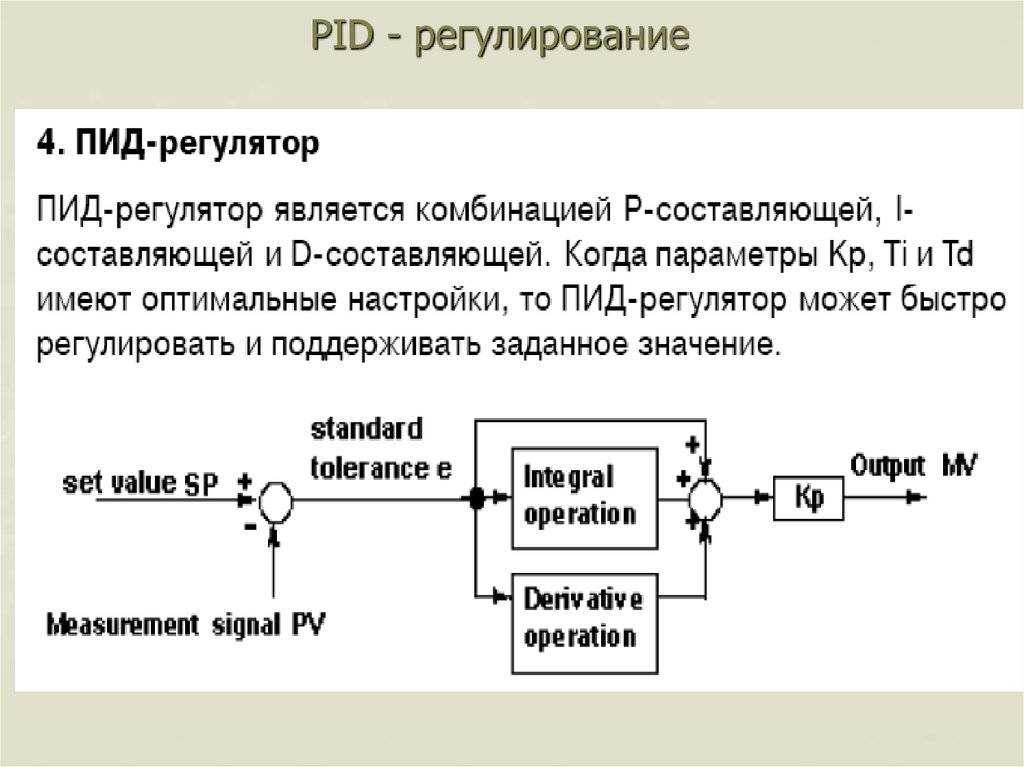
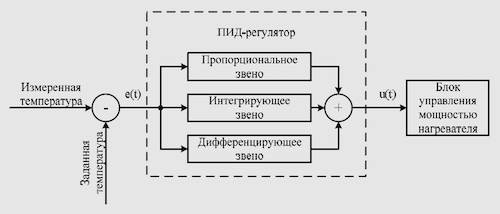
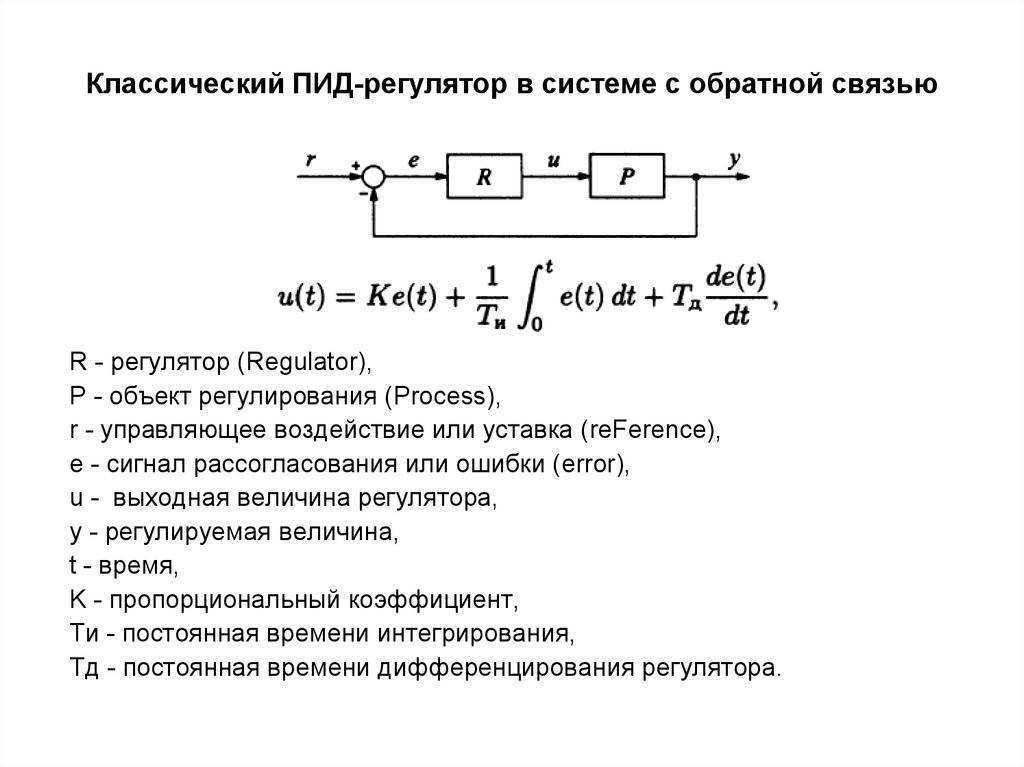
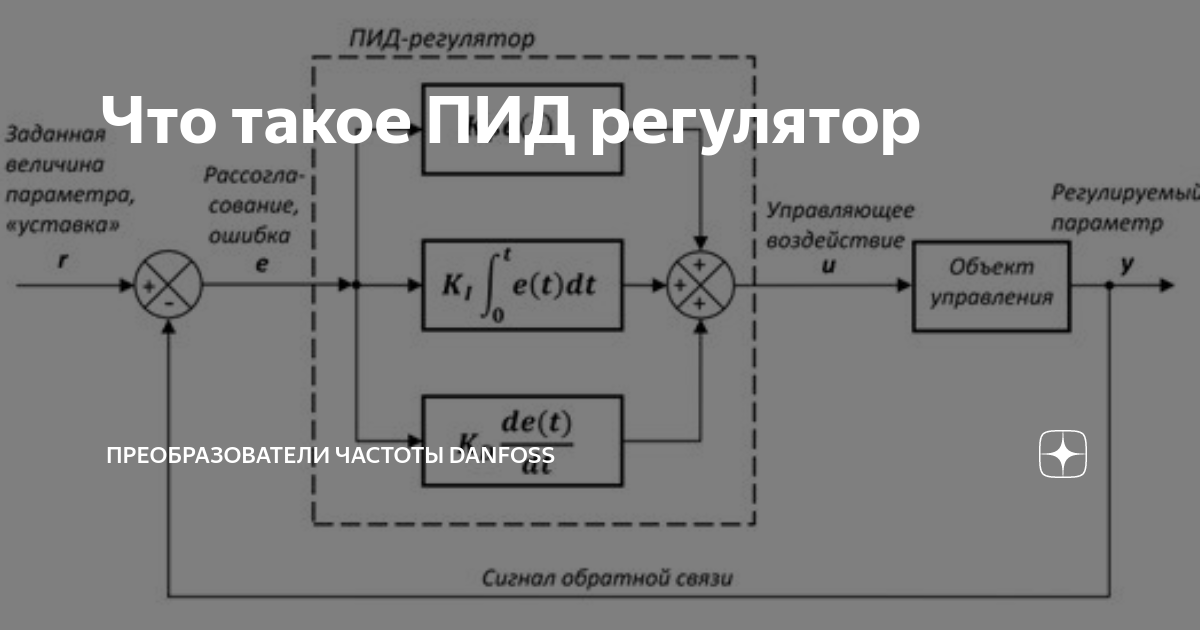
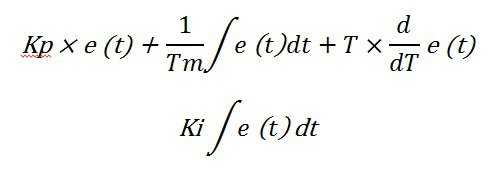
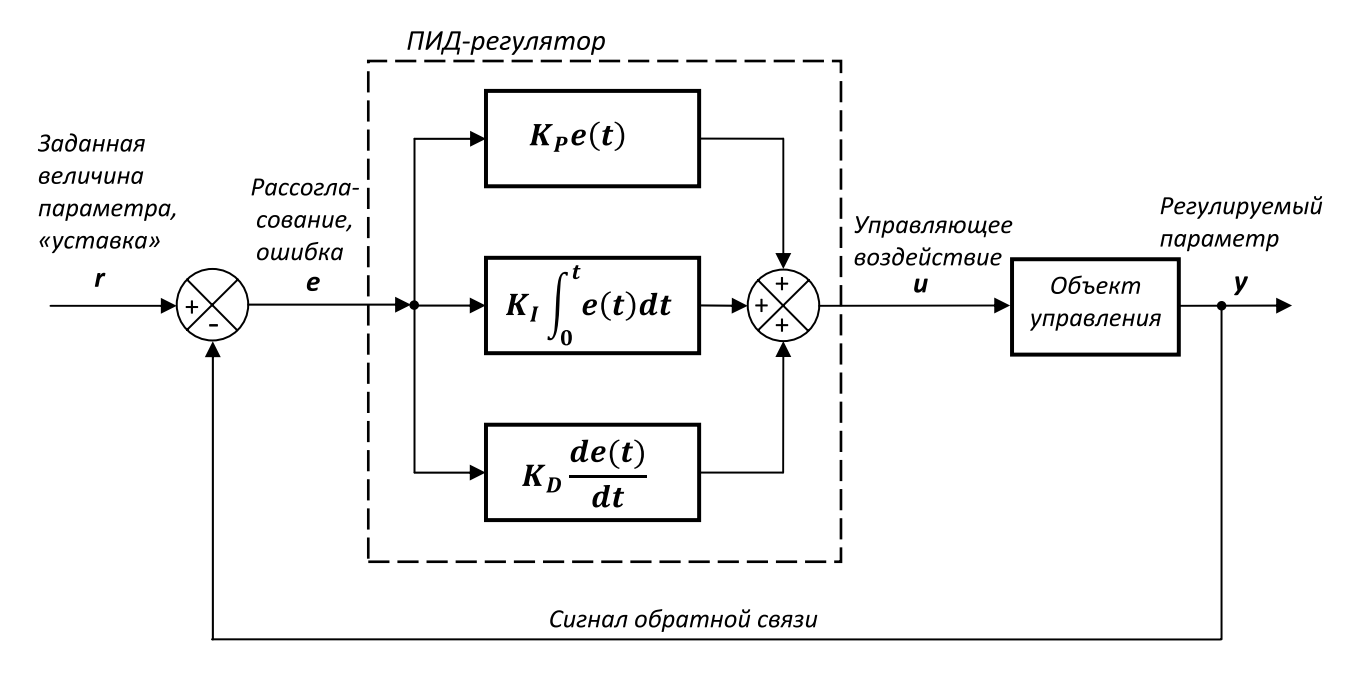
По сути, такая аппаратура является контроллером управления температуры и влажности. Она отвечает за формирование управляющего сигнала, который с точки зрения физики состоит из трех слагаемых:
- первое слагаемое пропорционально разности между двумя сигналами: входным и обратной связи;
- второе соответствует интегралу данных рассогласования;
- а третье — производной последнего.
Следует отметить, что встречаются упрощенные устройства, в которых одна из вышеперечисленных составляющих может отсутствовать. В таком случае наименование ПИД сокращается, так как прибор становится, например, пропорционально-интегрирующим.
В простом приближении любой контроллер для управления температурой и влажностью действует по стандартной формуле, где присутствуют три основных составляющих, одна из которых может быть исключена: пропорциональная, интегрирующая и дифференциальная.

Поэтому ПИД-регулятор предназначен для поддержания определенных значений у какой-либо величины за счет изменения другой. По этой причине появляется такое понятие как «рассогласование», которое отражает отклонение величины от требуемой.
Разные контроллеры в виде ПИД могут быть ориентированы на несколько разные формулы, но все базируются на данных, получаемых по информации от входного сигнала
Также важно учитывать и всегда смотреть в инструкциях к устройствам не только формулы, но и термины, так как у разных производителей они могут серьезно отличаться
Пример работы ПИД
Приведем пример с контроллером управления температурой воды. То есть объектом здесь выступает некая емкость с водой, в которой требуется поддержание температуры в определенном диапазоне за счет регулировки открытия клапана. Поэтому рассмотрим, как формируются коэффициенты и составляющие в случае управления трехходовым клапаном:
- пропорциональная возникает в случае рассогласования с введенными в систему данными. То есть учитывается разница между желаемой и фактической температурой, после чего умножается на коэффициент, который необходим для дальнейшей подачи на клапан. При падении градусов происходит запуск процесса отопления (нагрева), а при поднятии выше требуемой величины идет отключение или охлаждение;
- интегральная необходима для компенсации воздействия окружающей среды и других сторонних помех, которые препятствуют поддержанию температурного показателя на нужном уровне. Данная часть формулы помогает исключить вероятные ошибки, возникающие по разным причинам;
- дифференциальная помогает компенсировать задержки, которые возникают при подаче воздействия и обратной реакции с ее стороны. Именно эта составляющая препятствует потенциальному возникновению перегрева, так как формируется прогнозирования отклонений, влияющих на подаваемую мощность к устройству.
Контроллер управления температуры и влажности подразумевает присутствие датчика внутри емкости с жидкостью. Такими объектами могут выступать муфельные печи, климатические камеры и т. д. В качестве датчика выступают термометр сопротивления или термопара, которые имеют прямую связь для передачи данных по температуре ПИД-регулятору.
Для увеличения температурного показателя производится подогрев жидкости за счет подачи пара при помощи клапана автоматического регулирования. Для этого со стороны оператора понадобится введение значения, которое требуется для поддержания внутри емкости.
Но следует учитывать, что система будет некорректно работать в случае неправильной настройки коэффициентов. Это вызовет возникновение скачков температуры и полное открытие или закрытие клапана. Тогда потребуется перерасчет этих данных и повторное введение в систему. Степень открытия конструктивного элемента будет при этом находиться в среднем положении.
Транскрипт
1 ПИД-регулирование давления: настройка преобразователей частоты ATV31/ ATV312 28/01/2014
2 СОДЕРЖАНИЕ Назначение… 3 Предварительные настройки… 4 Автоподстройка… 6 Выбор закона управления двигателем… 7 Конфигурирование канала управления… 8 Настройка авторестарта при пропадании и восстановлении напряжения питания… 8 Обратная связь… 9 Назначение обратной связи Задание давления Инверсия ПИД-регулятора Реакция на аварию датчика обратной связи Настройка ПЧ Настройка спящего режима Подключение датчика
4 Предварительные настройки Сброс на заводские наст ройки: Меню Drc ПРИВОД: CFG = Std FCS = InI 4
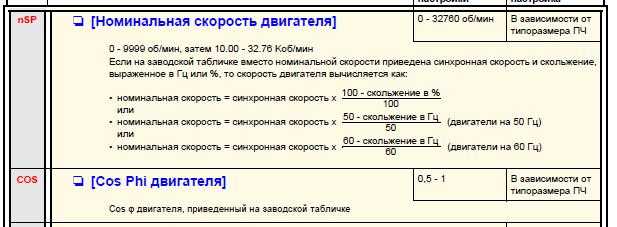
5 Ввод параметров двигателя: Если входное напряжение ПЧ = 3 ф/ в, то соедините обмотки двигателя звездой. Параметр UnS = 380 В Параметр ncr = 0.7 A Если входное напряжение ПЧ = 1 ф/ В, то соедините обмотки двигателя треугольником. Параметр UnS = 220 В Параметр ncr = 1.21 A 5
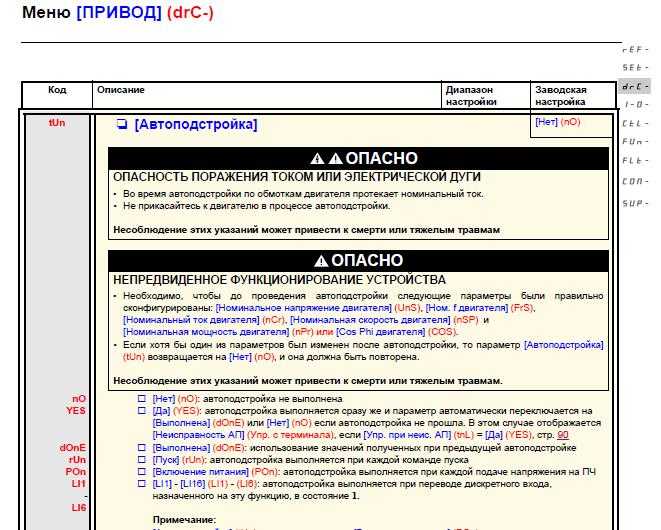
6 Автоподстройка Параметр tun = Yes: 6
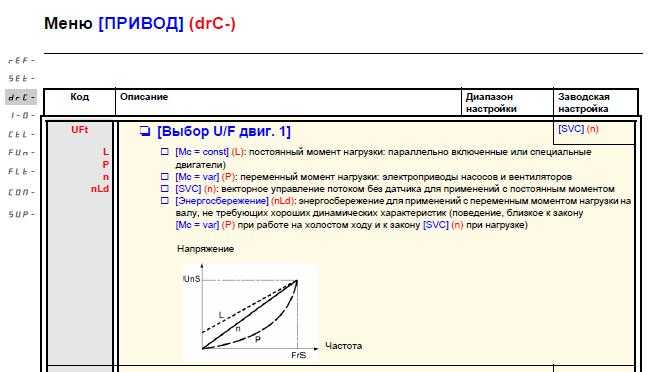
7 Выбор закона управления двигателем Параметр Uft = P, если механизм насос или вентилятор. 7
8 Конфигурирование канала управления Меню Ctl- Параметр LAC = L3 Параметр CHCF = SEP Параметр Cd1 = Ter Меню I_O Параметр tcc = 2C Кнопка СТАРТ (с фиксацией) подключается к LI1 и 24В. Настройка авторестарта при пропадании и восстановлении напряжения питания Настройте параметр tct: Меню I_O Параметр tct = LEL 8
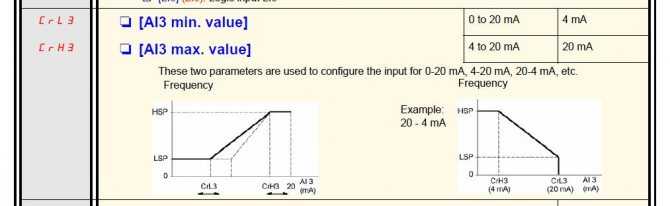
9 Обратная связь Датчик обратной связи (давления) с токовым выходом 4..20мА должен быть присоединен к входу AI3. Аналоговый вход AI3 должен быть сконфигурирован с диапазоном 4..20мА: Конфигурация входа: Меню I_O Параметр CrL3 = 4 Параметр CrH3 = 20 9


10 Назначение обратной связи Внимание: несовместимость функций! Необходимо отменить SA2 (SA2 = No) и PS2/PS4 (PS2 = No, PS4 = No). Меню Прикладные функции Подменю PI-/ ПИД-регулятор Параметр PIF = AI3 10
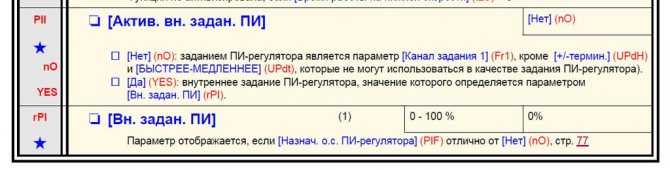
11 Задание давления Внутреннее задание ПЧ (если задание не нужно изменять в процессе работы например, ночная/дневная уставка давления): Подменю PI-/ ПИД-регулятор PII = Yes Параметр rpi Параметр rpi изменяется в пределах . 100% соответствует диапазону измерения датчика с учетом коэффициента масштабирования Fbs. 11
12 Инверсия ПИД-регулятора Реакция на аварию датчика обратной связи В случае отказа датчика давления сигнал обратной связи становится равным нулю. На выходе ПИД-регулятора в этом случае появится максимальный сигнал задания частоты. Скорость вращения двигателя насоса станет максимальной и давление в системе может превысить максимально допустимое
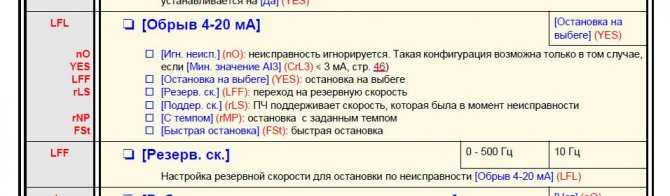
Поэтому очень важно настроить реакцию ПЧ на отказ датчика давления. Меню Flt Можно задать тип реакции ПЧ на аварию датчика: стоп выбегом, стоп по рампе либо работу на выбранной скорости. LFL = rnp (торможение по рампе, чтобы не было гидроудара) Либо LFL =LFF работа в случае аварии на скорости, заданной параметром LFF
12
LFL = rnp (торможение по рампе, чтобы не было гидроудара) Либо LFL =LFF работа в случае аварии на скорости, заданной параметром LFF. 12
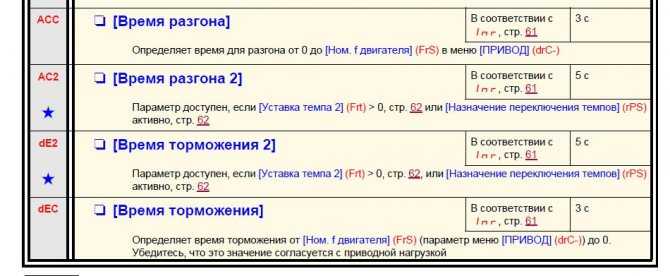
13 Настройка ПЧ Если кто-то уже настраивал ПЧ и вводил куда-то какие-то значения и неизвестно какие значения, то произведите сброс параметров ПЧ на заводские настройки. 1) Ввод параметров двигателя меню Drc. (Обязательно, иначе возможен выход двигателя из строя!) 2) Настройка параметров рампы ускорения/торможения: ОБЯЗАТЕЛЬНО для насосов необходимо задать время рампы для исключения гидроударов в системе! Конкретные значения определяются системой. Меню Set Параметр ACC, DEC 3) Закон управления двигателем 4) Автонастройка 5) Настройка пределов изменения частоты ПЧ Меню Set/ параметр LSP: 0 Гц (установите минимальную частоту, требуемую для поддержания насосом минимального давления в системе). Меню Set/ параметр HSP: 50 Гц 13
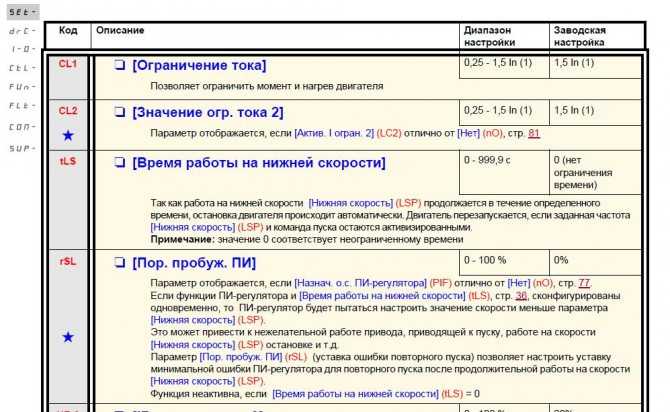
14 Настройка спящего режима См. описание параметров rsl и tls (Руководство по программированию). 14
15 Подключение датчика По вопросам подключения датчика давления просьба обращаться к документации на датчик давления! Ниже приведен пример подключения: Двухпроводное подключение Клемма 3: «+» Клемма 1: «-» Аналоговый вход ПЧ AI3: + COM: — Не забудьте объединить COM-клемму ПЧ и «минус» внешнего источника питания (если используется внешний источник питания). 15
Советуем изучить — Схемы электрических исполнительных механизмов с электродвигателем
Настройка ПИД
Коэффициенты ПИД регулятора (краткое разъяснение и настройка)
В данной статье изложено мое субъективное мнение.
Выводы сделал из объяснений Клауса Либля (Klaus Liebl), инженера из Германии (MTU), и личного опыта.
Перед началом настройки ПИД регулятора необходимо заблаговременно убедиться в наличии трех компонентов для настройки:
1. Должен быть создан удобный график, который бы позволял следить за изменениями процесса (желательно с функцией масштабирования, чтоб видеть весь процесс в ретроспективе). Переменные, которые нужны: PV, SP, OUT;
2. Функциональный блок ПИД регулятора должен быть установлен в таком месте программы, которое гарантировало бы его цикличный вызов с равными таймингами (промежутками времени). Если мы будем это игнорировать, то вычисления ПИД будут плавать и вносить погрешность.
Пример: ОВ100 или периодическая задача с циклом в 100 мс;
3
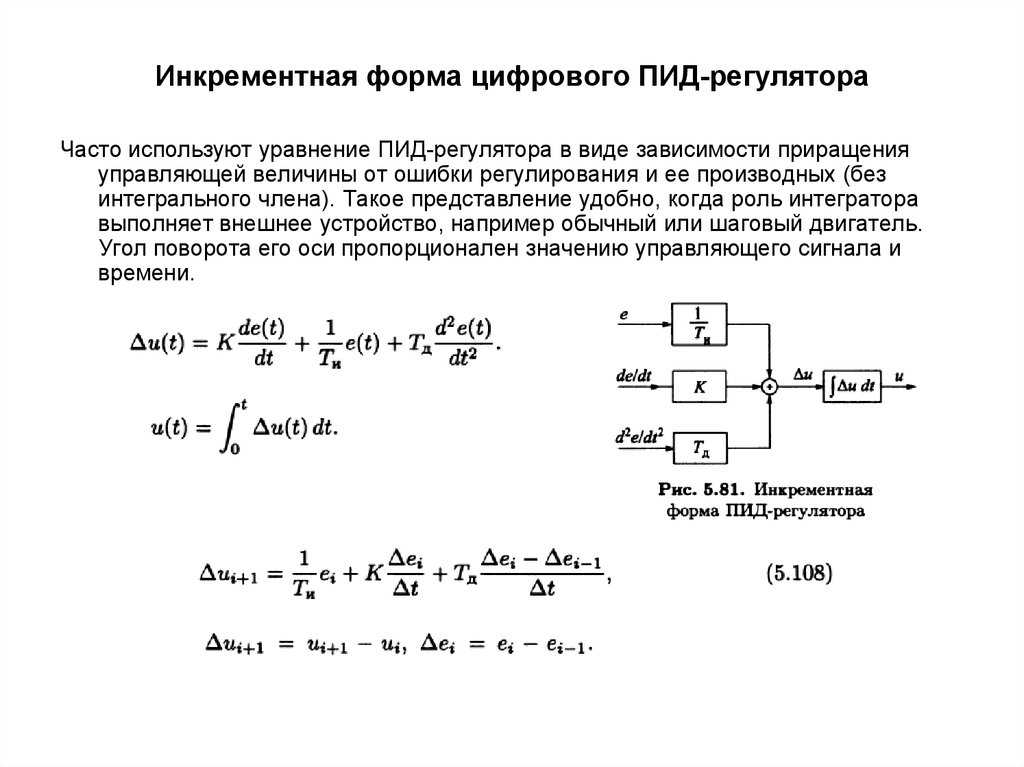
Важно понимать, какая формула используется в библиотеке. Мне известны 2 формулы:
В данной формуле очень важен коэффициент интегрирования P, который может быть как прямым, так и обратно пропорциональным.
Метод подбора коэффициентов Зиглера-Никельса хорош, но имеет недостаток в том, что в сложных взаимосвязанных системах, когда невозможно исключить внешнее воздействие на процесс, настройка конкретного контура может занять очень длительное время.
Остановлюсь подробнее на основных коэффициентах ПИД (PID):
1. Пропорциональный коэффициент «P» (гейн) – основной коэффициент регулятора. От него зависит скорость и направление работы регулятора. Основная задача ПИД-регулятора – стабилизация переменной процесса (process variable) по установленному значению (уставка или setpoint). Стабилизация и раскачка – разные вещи.


Если параметр «P» сделать отрицательным, контур начнет работать с точностью до наоборот, а, значит, проявляем с ним аккуратность и ставим значение 0,5.
Так, например, если контур нагревает какую-либо среду, значит, «P» должно быть положительным, если же Вы охлаждаете что-либо, то «P»-коэффициент должен быть отрицательным.
2. Интегральный коэффициент «I» оказывает влияние на процесс регулирования. Его роль – «точность и инертность»
Стоит акцентировать внимание на формулу 1
Если она не обратно пропорциональна, то для увеличения интегральной составляющей придётся уменьшать этот коэффициент, в нашем случае, – увеличивать. «Точность» указывает, насколько большим должен быть угол наклона кривой графика переменной процесса.
Если Вам необходимо успокоить периодические колебания, достаточно просто сильно увеличить коэффициент интегрирования (например, с 0,5 до 8,0).
3. Дифференциальный коэффициент «D» служит для успокаивания сложных взаимоинертных систем, для быстрых взаимосвязанных процессов, когда воздействие на объект вызывает волнообразные затухающие процессы, подобные тем, когда мы бросаем камень в воду и видим расходящиеся волны. С каждой волной колебания заметно стихают. Для нивелирования таких колебаний и служит этот коэффициент.
Внимание: для медленных процессов – более 40 с от минимума до максимума графика кривой – данный параметр должен быть исключен, то есть равен 0. Useful video:
Useful video:
#настройкаПИД, #коэффициентинтегрирования, #интегральныйкоэффициент, #дифференциальныйкоэффициент, #коэффициентыпид, #PID, #подборпид
English version