Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор – это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
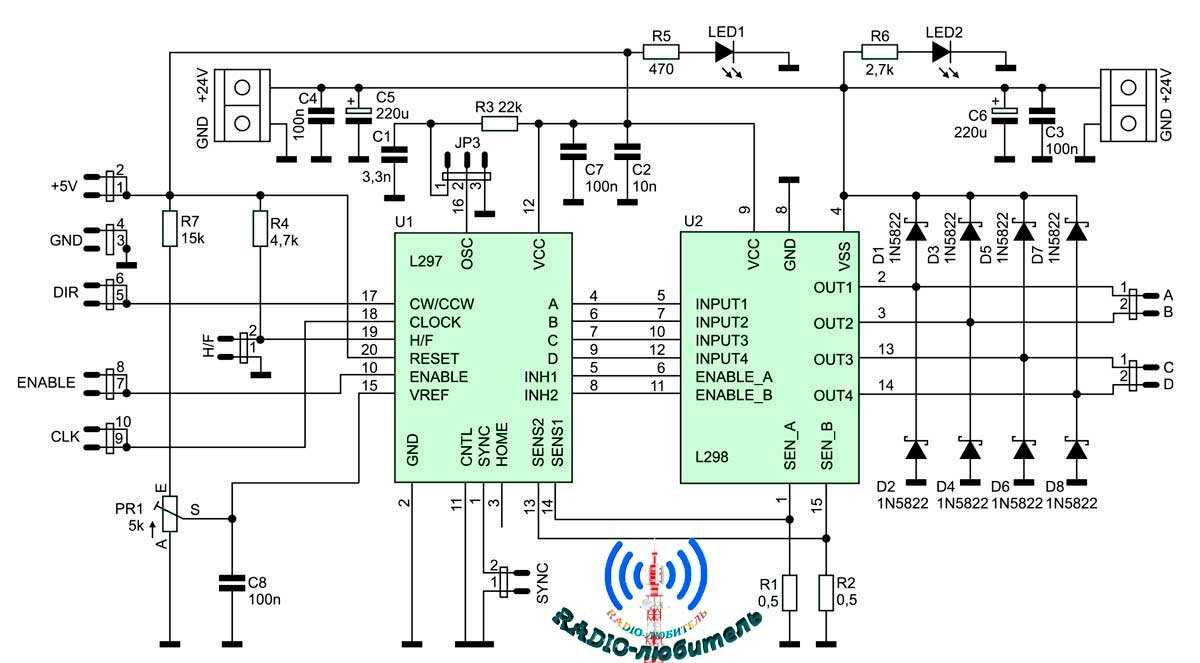
Схема подключения шаговых двигателей
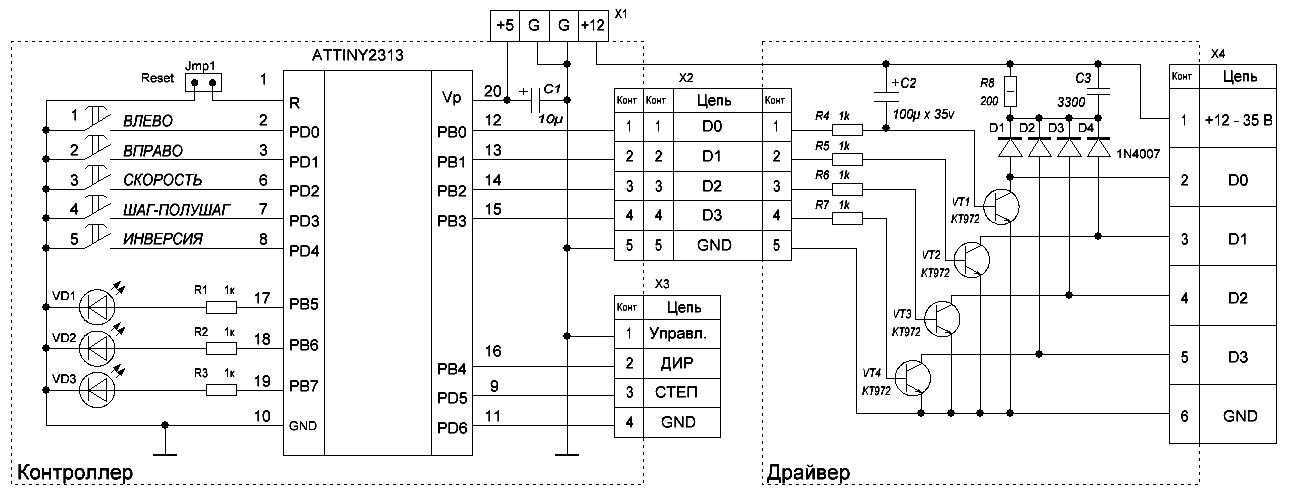
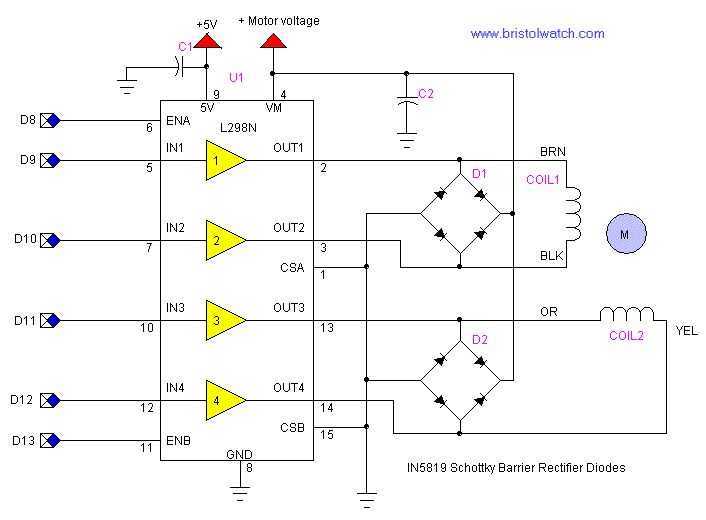
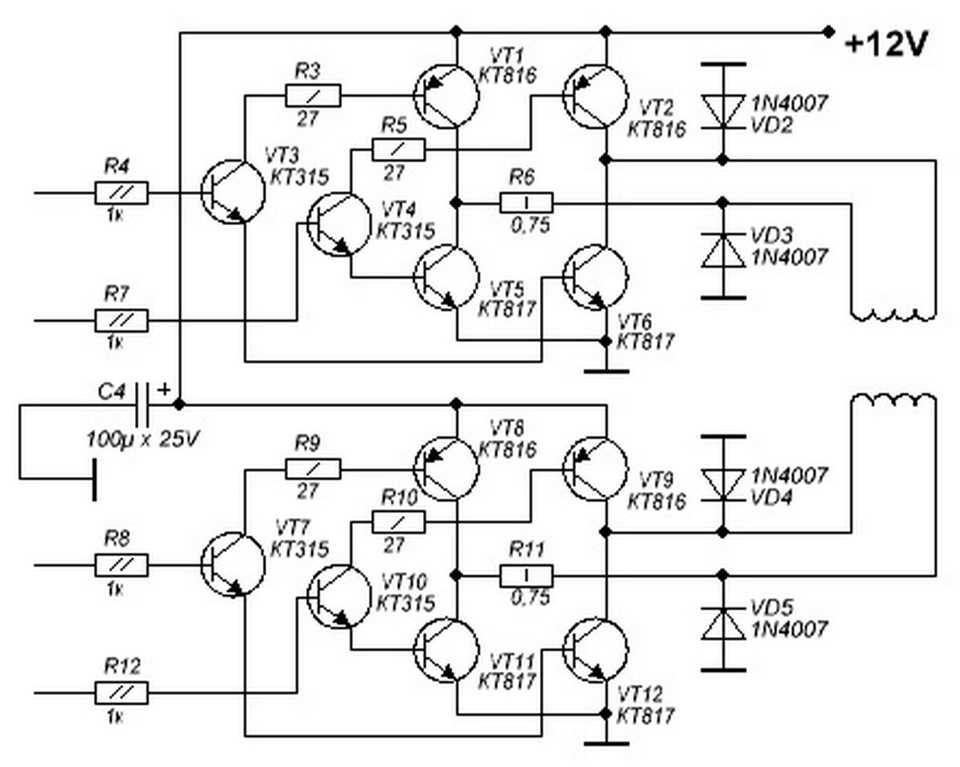
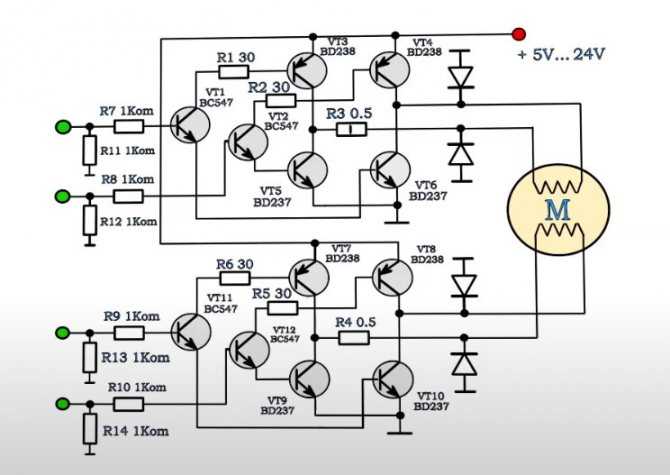
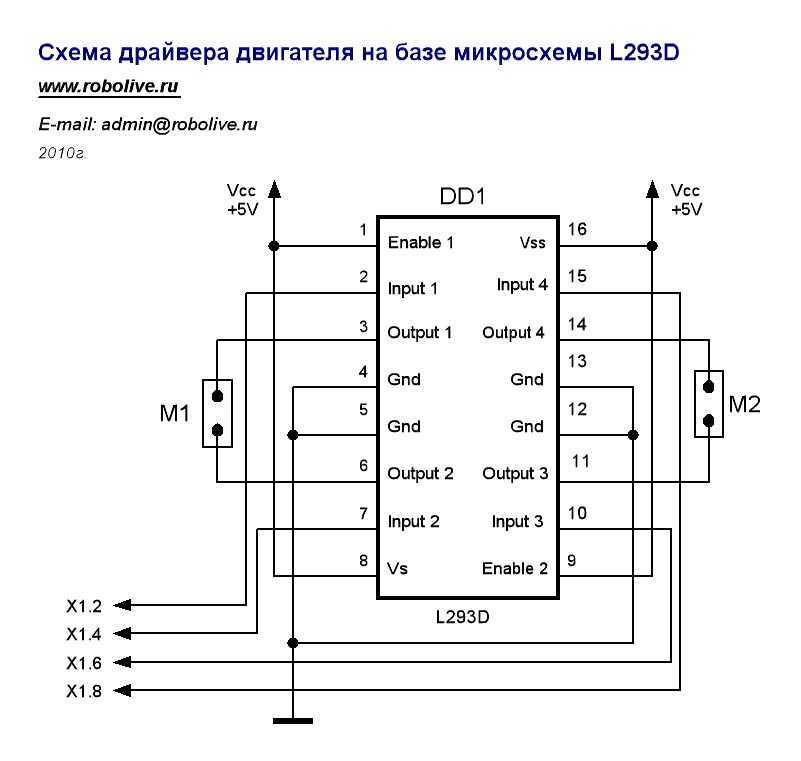
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
В статье подробно рассказано о нескольких способах обновления BIOS на материнской плате Asus.
Теперь вы точно подберете идеальный ноутбук для работы или учебы!
Данная статья описывает преимущества SSD накопителей для приложений и игр. Также здесь выполняется сравнение между достоинств данного накопителя с устаревшим аналогом.
В статье речь идет о том, как отремонтировать пластмассовый китайский электрочайник.
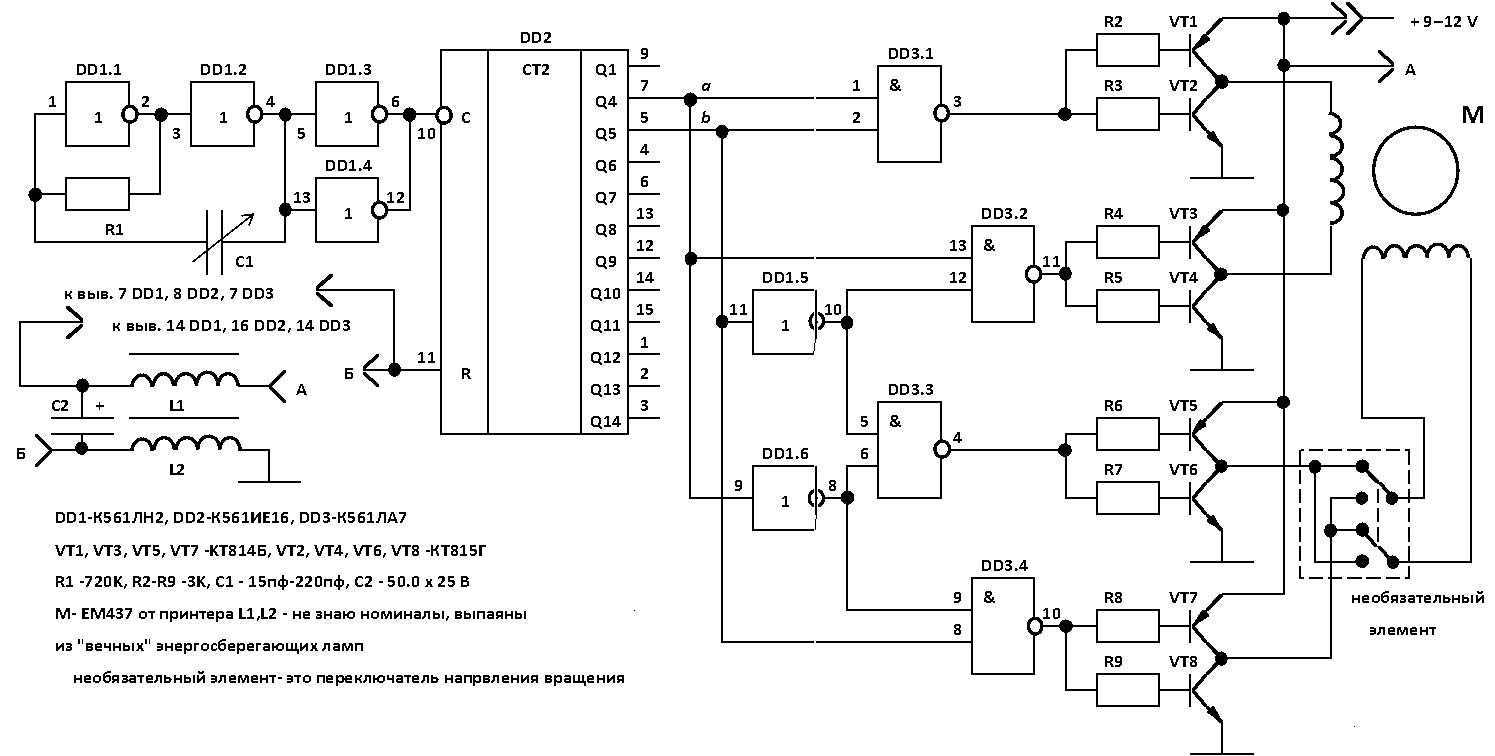
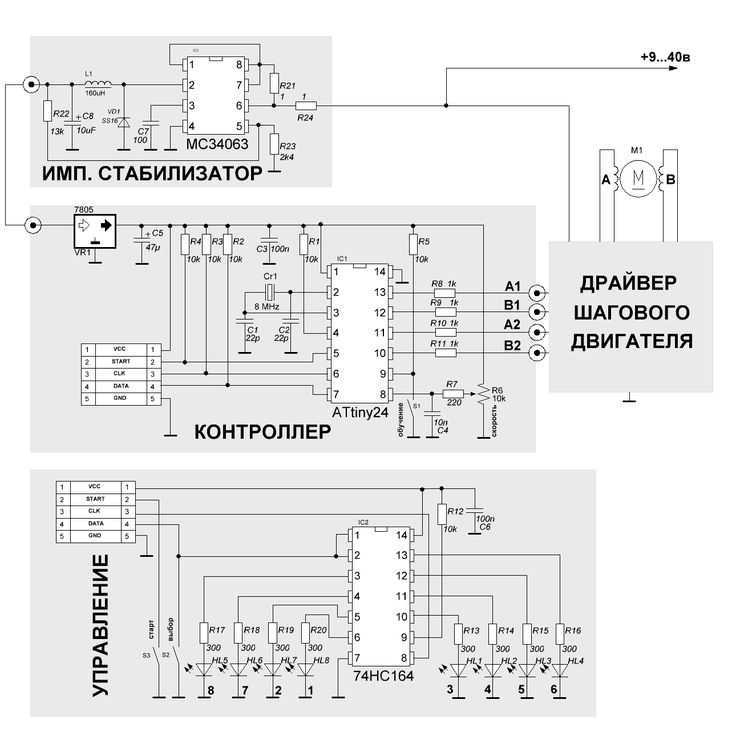
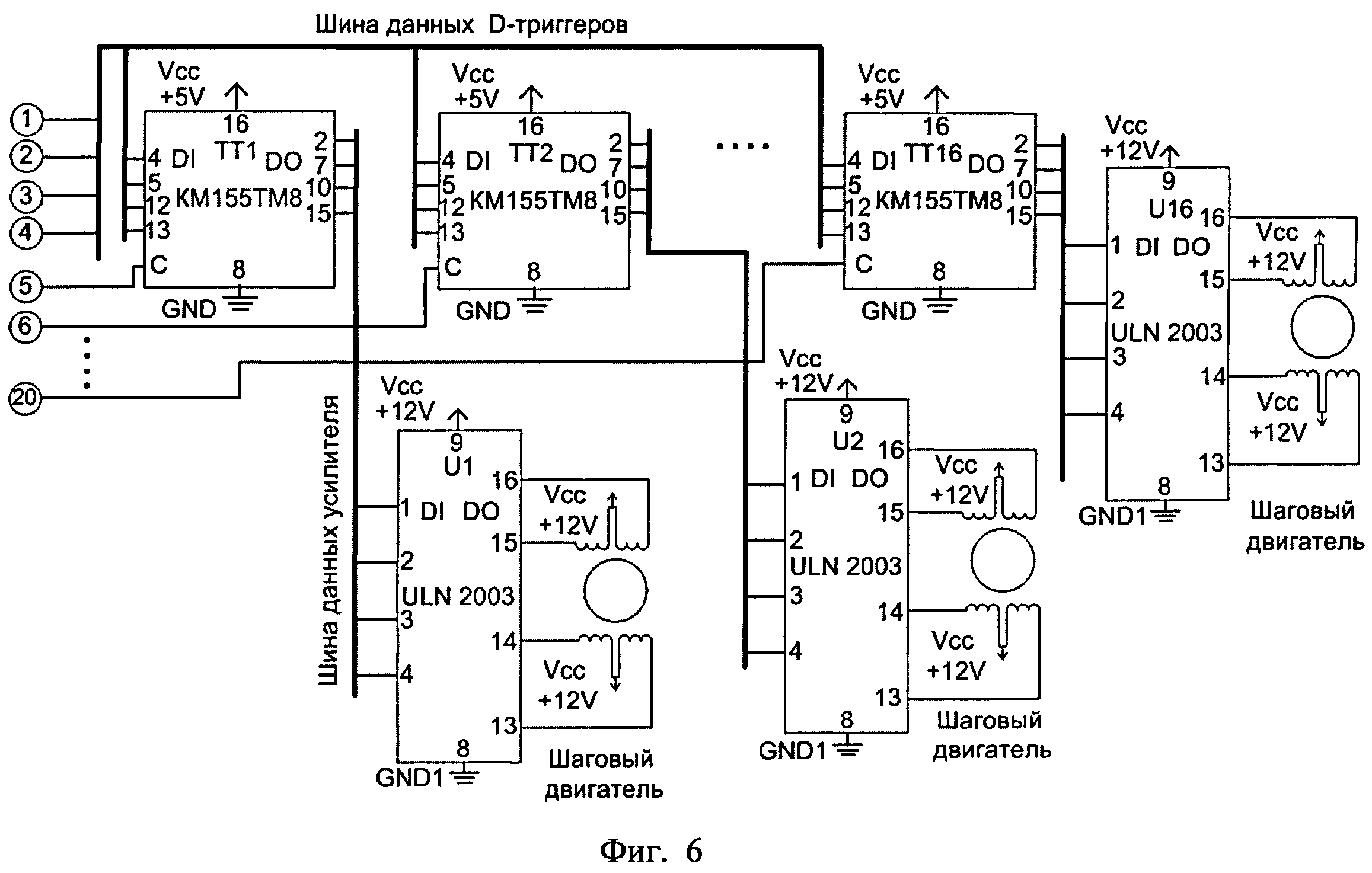
Шаговый контроллер
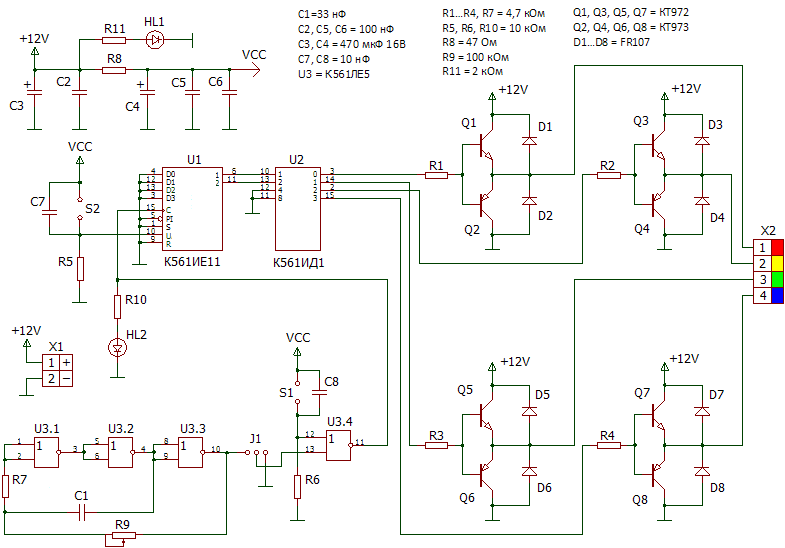
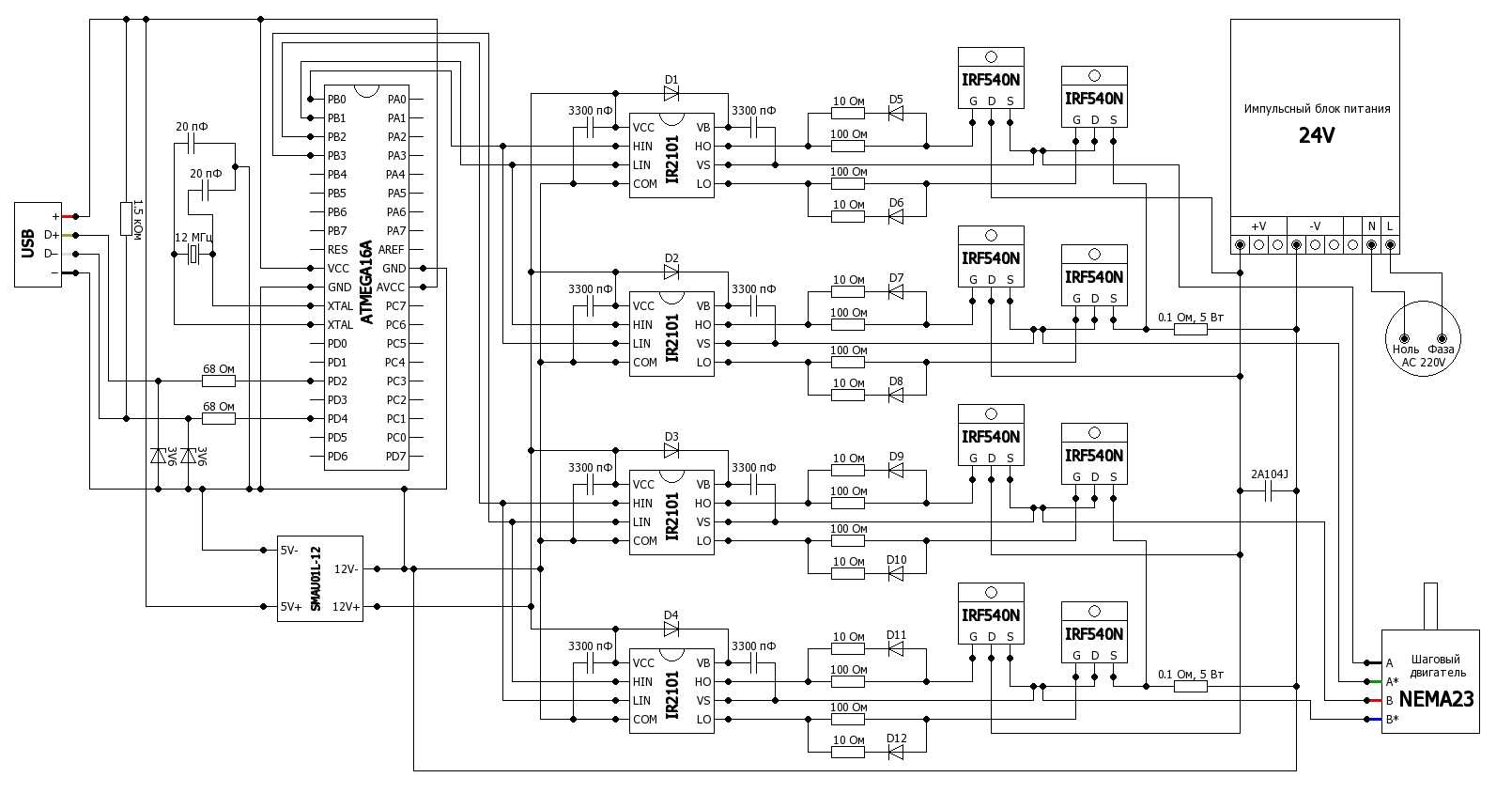
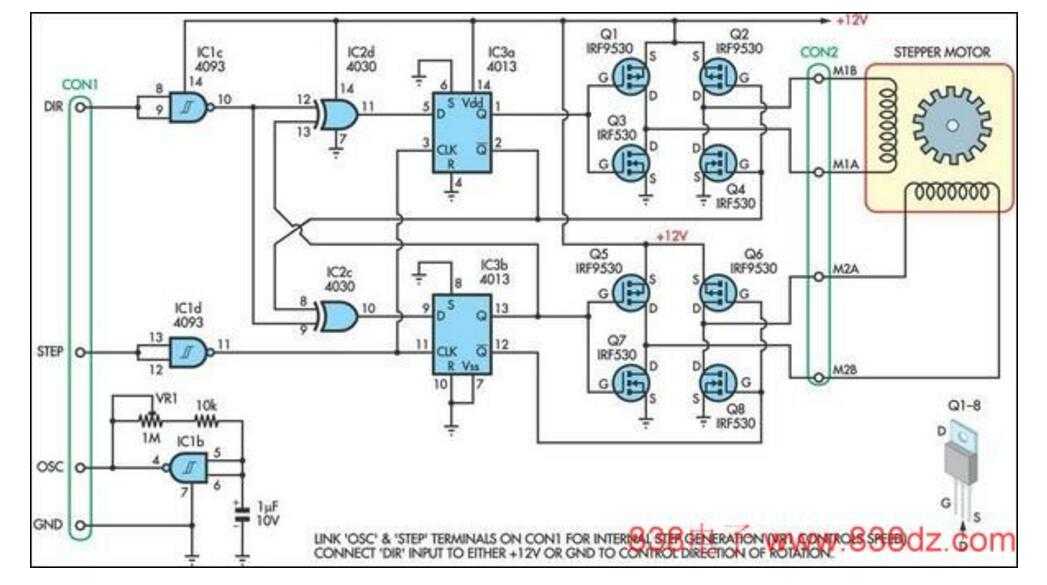
Шаговый контроллер, шаговые двигатели широко используются там, где точность являются основными соображениями при вращении или позиционировании. Микропроцессоры или микроконтроллеры часто используются для управления их работой. Но это не всегда удобно или необходимо использовать микроконтроллеры, так как это сделает гаджет излишне дорогостоящим. Вот простая схема шаговый контроллер для шаговых двигателей на полную мощность для любого количества целых ступеней.
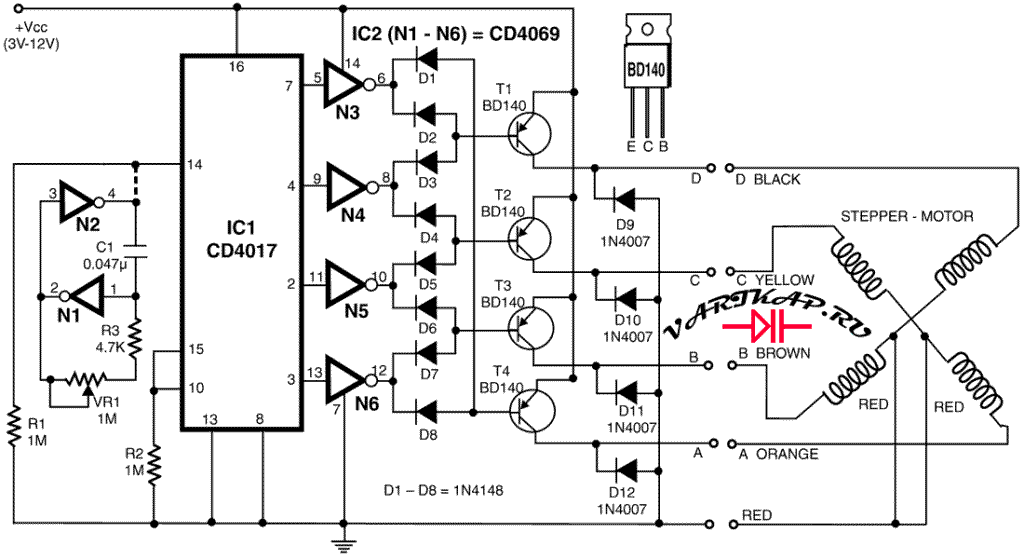
![]()
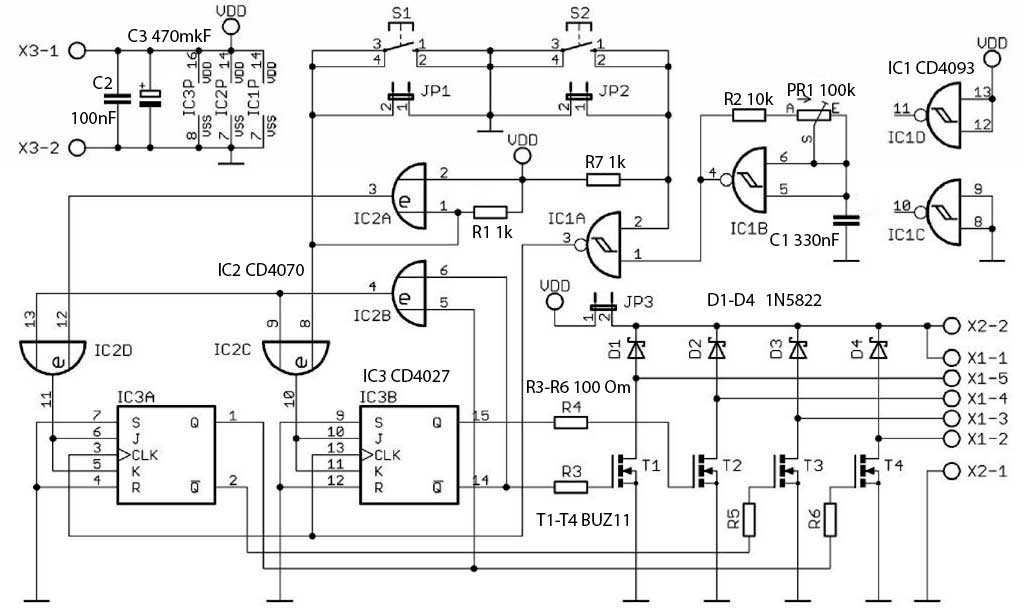
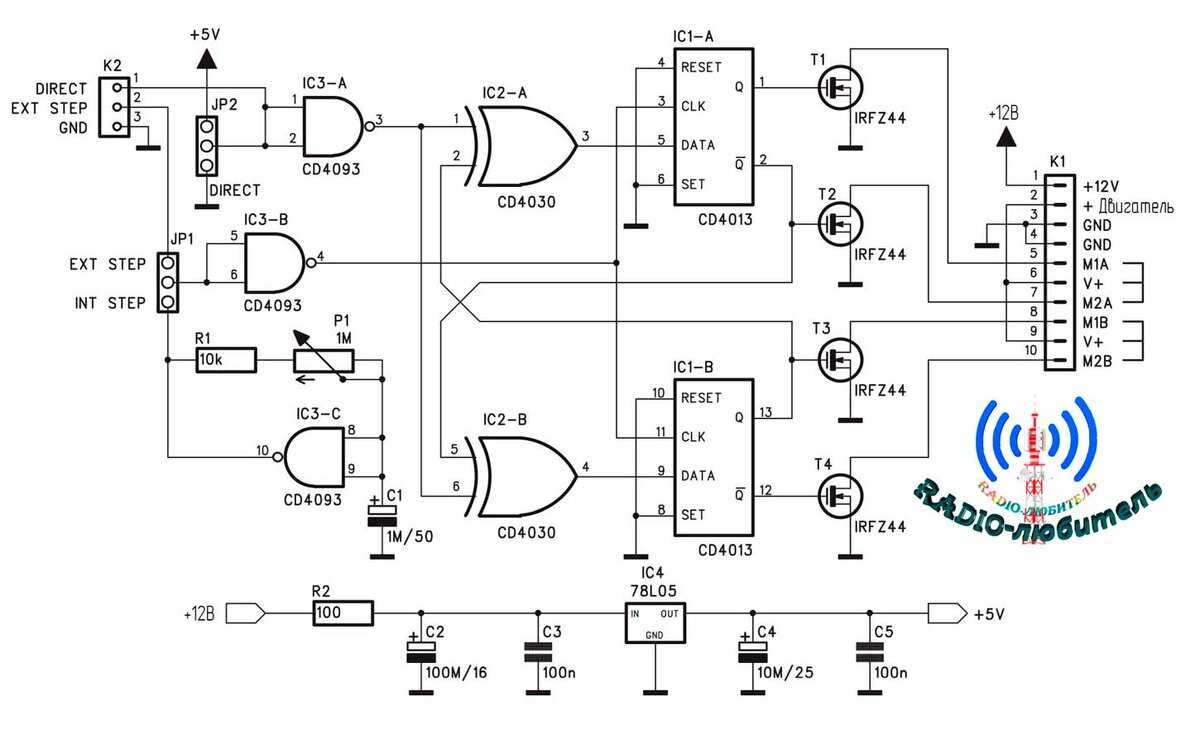
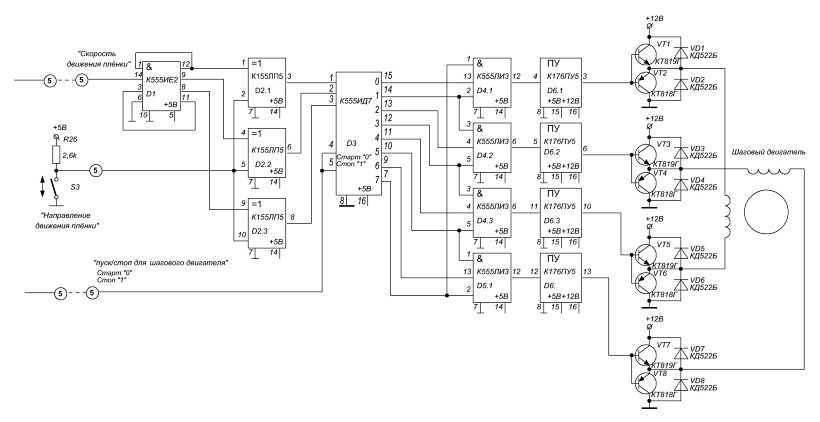
Настоящая схема шаговый контроллер предназначена для управления четырех обмоточными шаговыми двигателями, но ее можно легко модифицировать для других типов. В качестве генератора здесь используется популярный десятичный счетчик CD4017 (IC1) с декодированными выходами.
Поскольку нам нужны только четыре выхода, пятый выход (вывод 10) подключен к выводу RESET (вывод 15). Четыре выхода, в сочетании с четырьмя силовыми транзисторами npn, функционируют как полно потенциальные драйверы половинной мощности. Чтобы получить полную мощность, используются восемь диодов (8 x 1N4148). Таблица истинности I изображает работу на половинной мощности, а таблица истинности II – работу на полной мощности. Использование шестнадцатеричного инвертора IC2 (CD4069) дает два преимущества. Инверсия через инвертора NOT позволяет использовать силовые транзисторы pnp (4 x BD140), которые позволяют заземлить общую клемму двигателя. Это полезно во многих условиях. Два неиспользуемых инвертора (N1 и N2) удобно использовать в качестве тактового генератора в сочетании с переменным резистором VR1 и конденсатором C1. Изменение сопротивления резистора позволяет изменять тактовую частоту и, следовательно, скорость вращения двигателя. Если неизвестно, какая последовательность клемм двигателя должна быть подключена к клеммам от A до D схемы, сначала подключите любую одну клемму двигателя к клемме A цепи и подключите общую клемму к земле.
Теперь дайте наименьшее возможное напряжение (3 В) и проверьте правильность последовательности трех оставшихся клемм, используя метод проб и ошибок для максимально возможных шести комбинаций. При правильной последовательности двигатель будет вращаться в направлении по часовой стрелке или против часовой стрелки. Чтобы использовать внешние тактовые импульсы, просто отсоедините контакт 14 CD4017B от контакта 8 CD4069B, а затем подключите внешние генератор тактовых импульсов к контакту 14 CD4017B. Каждый импульс приводит двигатель в действие на один шаг, который обычно может составлять 1,8 градуса или 3,6, как показано на табличке двигателя.
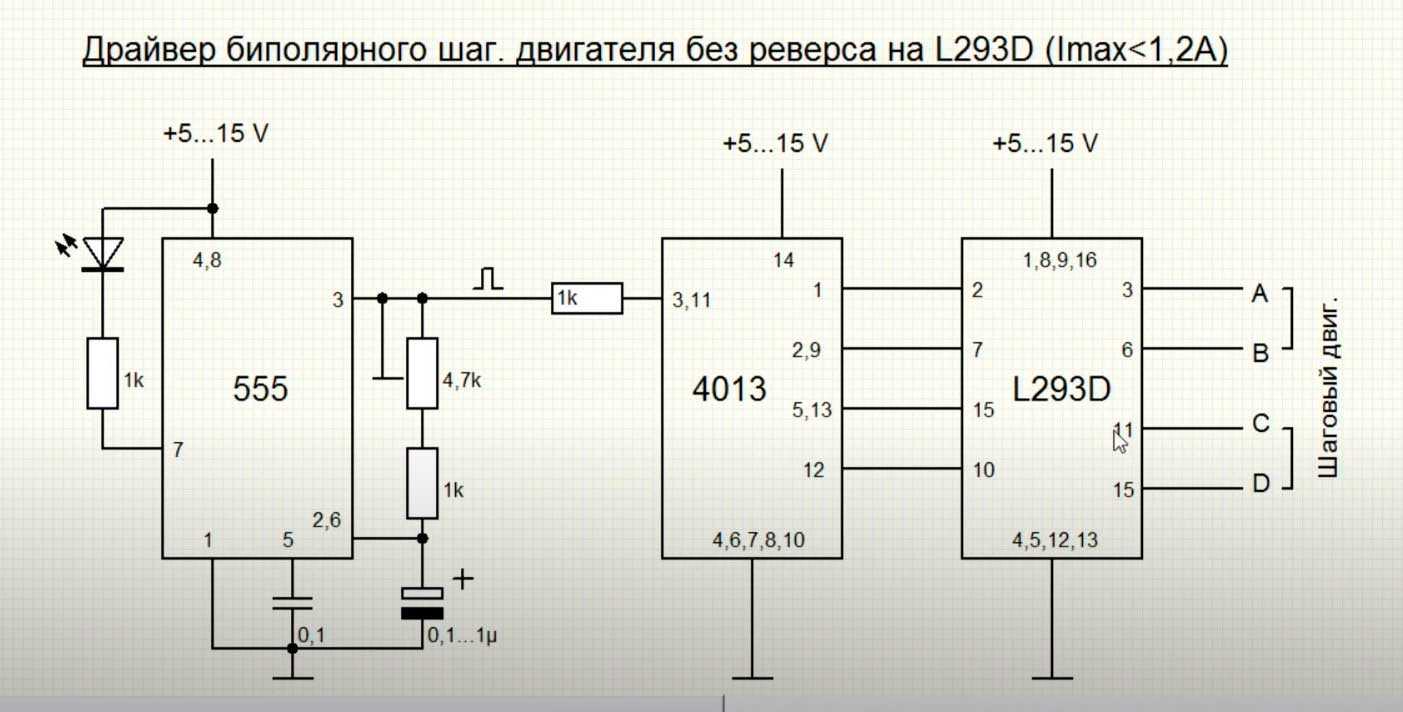
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса – положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями – полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
Полный шаг – такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг – поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
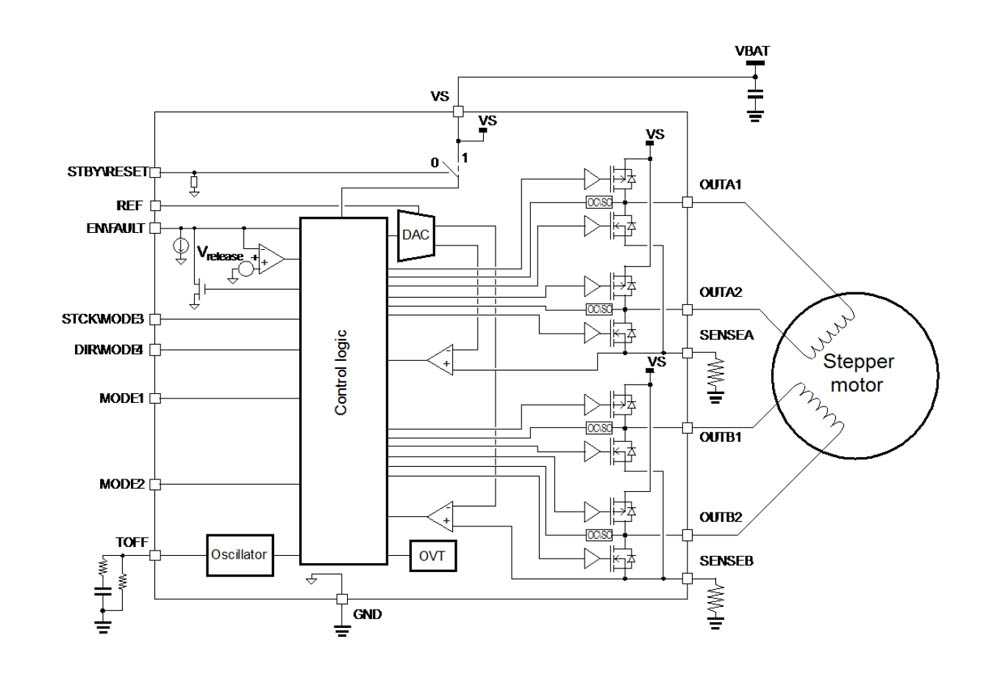
![Схема управления шагового двигателя. создаем робота-андроида своими руками [litres]](https://magazinzing.ru/wp-content/uploads/4/e/0/4e0a9a84b6d2b23c61ae6a606ca1c51a.gif)